机械设计14-15
机械设计基础(第五版)课后习题答案(整理版)
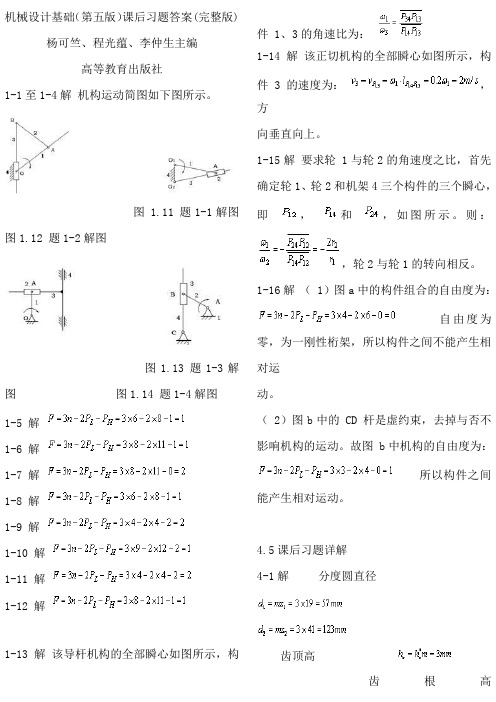
机械设计基础(第五版)课后习题答案(完整版)杨可竺、程光蕴、李仲生主编高等教育出版社1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:,方向垂直向上。
1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
4.5课后习题详解4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为 0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定则解得故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。
4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为。
(完整版)《机械设计基础》答案
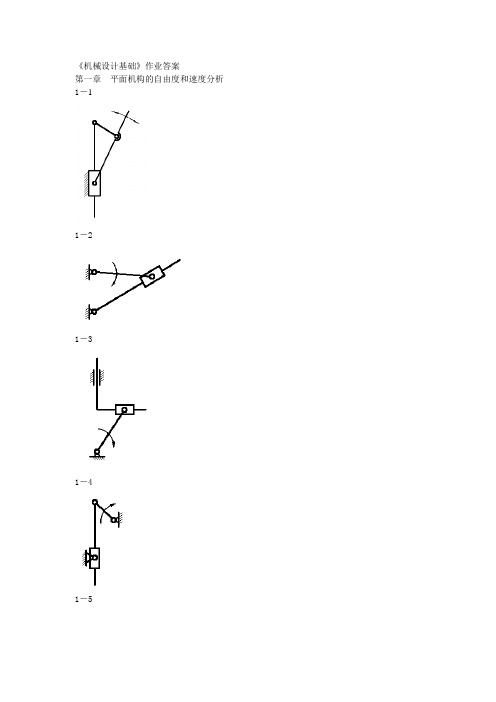
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L或: 122427211229323=--=⨯-⨯-⨯=--=HL P P n F1-1122424323=-⨯-⨯=--=HL P P n F1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω11314133431==P P ω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω121214122421r P P ==ω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
在三角形ABC 中,BCA AB BC∠=sin 45sin 0,52sin =∠BCA ,523cos =∠BCA , 045sin sin BCABC AC=∠,mm AC 7.310≈s mm BCA AC P P v v P /565.916tan 1013141133≈∠⨯===ω1224212141P P P P ωω=s rad AC P P P P /9.21002101001122412142≈-⨯==ωω1-17:题1-17图所示平底摆动从动件凸轮1为半径20=r 的圆盘,圆盘中心C 与凸轮回转中心的距离mm l AC 15=,mm l AB 90=,s rad /101=ω,求00=θ和0180=θ时,从动件角速度2ω的数值和方向。
机械设计经典计算公式

4.0625 满足要求 697.4977318 930 1.333337669 1.3~1.7 满足要求 MPa MPa
32 33 34 35
τmax τs S Sp
最大切应力 屈服极限
τmax=8KDPn/ πd3
静载荷,80钢
疲劳安全系数
S=τp / τmax S>Sp,强度满足要求
序号
代号 一
序号
代号 一
定义 已知
公式/出处
结果
单位
1 2 3 4
z d1 p pt
二
链轮齿数 滚子外径 链条节距 链条排距
计算
29 机械Ⅲ表13-2-1 机械Ⅲ表13-2-1 d=p/sin(180° /z) da=p(0.54+cot180/z) df=d-d1 ha=0.27p 机械Ⅲ表13-2-1 机械Ⅲ表13-2-15 15.88 25.4 31.88 234.9262911 247.2651432 219.0462911 6.858 21.08 9.5 90 26.84926291 69.80808357
机械Ⅱ表5-3-17 τ=2T/DdL 根据销的材料查表对于销 的常用材料可取 Τ p=80MPa 0.4
MPa MPa
满足要求 满足要求
焊缝及键连接受力计算比较 参考书目:机械手册Ⅰ、机械手册Ⅱ
序号 一 1 2 3 4 1
代号 M R k a τ τp
定义 焊缝计算(已知条件) 扭矩 轴径 焊缝高度 计算受力 剪切力(双面焊缝)
z1 z2 p
链轮1齿数 链轮2齿数 链条节距 z2=i*z1 机械Ⅲ图13-2-2
25 25 25.4 mm
17 18
dk a0 选a0 a0p k Lp L ka ac △a a v Ft 实际中心距 链条速度 有效圆周力 计算中心距 链条节数 链条长度 以节距计的初定中心距
机械设计全套课件 ppt课件
凡具备上述(1)、(2)两个特征的实物组合体称为机构。 机器能实现能量的转换或代替人的劳动去做有用的机械功,而 机构则没有这种功能。
仅从结构和运动的观点看,机器与机构并无区别,它们 都是构件的组合,各构件之间具有确定的相对运动。因此,通 常人们把机器与机构统称为机械。
ppt课件
7
机械设计基础
绪论
如图1-1所示的内燃机,
图1-5(a)闭式运动链
机械设计基础
ppt课件
图1-5(a)开式运动链
16
• 将运动链中的一个构件固定,并且它的一个 或几个构件作给定的独立运动时,其余构件 便随之作确定的运动,此时,运动链便成为 机构。
• 机构的组成:
• 机 架:固定不动的构件
• 原动件:输入运动的构件
• 从动件:其余的活动构件
1)运动副:两构件之间直接接触并能产生一定的相对
运动的连接称为运动副。
运动副元素:两构件上直接参与接触而构成运动副的部分— —点、线或面。
2) 运动副的分类
平面
运 运动副 动 副
空间 运动副
机械设计基础
高副:点、线接触 低副:面接触
球面副 螺旋副
ppt课件
运动副 转动副
13
图1-2 转动副
图1-3 移动副
是由汽缸体1、活塞2、连杆3、曲轴4、 小齿轮5、大齿轮6、凸轮7、推杆8等系列 构件组成,其各构件之间的运动是确定的。
0.1.2 构件与零件
机构是由具有确定运动的单元体组成的,这 些运动单元体称为构件。
组成构件的制造单元体称为零件。 零件则是指机器中不可拆的一个最基本的 制造单元体。构件可以由一个或多个零件组成。
ppt课件
20
机械设计基础
第五届机械创新设计大赛获奖名单(四川省)
七星瓢虫形家用分类垃圾桶创新设计 家庭用机机械类 转动储物架创新设计及物理样机研发 家庭用机机械类 推拉侧滑两用窗 水果削皮机 自动洗袜机 六足机械小爬虫 多功能健身椅 “生钱”垃圾桶 泡泡超人 自锁式防噪音安全门 自动打包式垃圾桶 便池清洁卫士 楼梯清洁卫士 新型多功能自动防盗窗 远程遥控智能煮饭机器人 仿人机器人之家庭快乐宝贝 家庭用机机械类 家庭用机机械类 家庭用机机械类 休闲娱乐机械类 休闲娱乐机械类 休闲娱乐机械类 休闲娱乐机械类 家庭用机机械类 家庭用机机械类 家庭用机机械类 家庭用机机械类 家庭用机机械类 家庭用机机械类 休闲娱乐机械类
98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130
家用机械A组-20 家用机械B组-14 家用机械B组-20 家用机械C组-3 家用机械D组-19 家用与娱乐E组-21 休闲娱乐机械F-5 家用机械A组-21 家用机械B组-9 家用机械D组-2 休闲娱乐机械F-4 休闲娱乐机械F-22 家用机械A组-11 家用机械A组-27 家用机械B组-6 家用机械C组-20 家用机械D组-5 家用机械D组-27 家用与娱乐E组-15 家用与娱乐E组-11 休闲娱乐机械F-12 家用机械A组-10 休闲娱乐机械F-23 家用机械C组-6 家用与娱乐E组-17 家用机械A组-14 家用机械C组-26 家用机械C组-15 家用机械C组-25 家用机械D组-11 家用与娱乐E组-19 家用机械C组-19 家用机械A组-8
序号
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
机械制图13-14零件图

常见的工艺结构 倒角
为了便于装配和保护装配面不受损伤,一般在轴孔端部 加工一圆台面,称为倒角。C2表示45°倒角,倒角深度2 mm。
倒角画法和尺寸注法
常见的工艺结构 退刀槽
为了在切削加工时容易退出刀具,不致使刀具损坏,以 及在装配时与相邻零件保证轴向靠紧,常在加工表面的台肩 处预先加工出退刀槽
退刀槽的画法
55º
Rc 密 Rp 封 R1 管 R2 螺
纹
标注示例
说明
55º密封圆锥管螺纹, 与圆锥内螺纹配合的 圆锥外螺纹的尺寸代 号为1/2,右旋;圆锥 内螺纹的尺寸代号为 3/4,左旋;公差等级 只有一种,省略不标 注。Rp是圆柱内螺纹 的特征代号,R1是与 圆柱内螺纹配合的圆 锥外螺纹的特征代号
部分螺纹的标记示例
孔的加工 钻孔
孔多数是用钻头加工。钻孔时要求钻头垂直于被钻孔的零 件表面,以避免钻头横向受力不均而弯曲,保证钻孔准确和 避免钻头折断。
钻两个直径不同的孔
错误
正确
钻头要尽量垂直于被钻孔的端面
常见的工艺结构 凸台
为了保证零件间接触良好,零件上凡与其他零件接触的 表面一般都要加工。为了降低零件的制造费用,应尽量减少 加工面。因此,零件上常有凸台结构。
外形及 牙型图
螺纹 特征 代号
传梯
锯
动形 螺螺
齿 Tr 形
B
纹纹
螺
纹
2、直径
螺纹有大径(d、D)、中径(d2、D2)、小径(d1、
D1),在表示螺纹时采用的是公称直径,公称直径是代表 螺纹尺寸的直径。
普通螺纹的公称直径就是大径。
3、 线数
沿一条螺旋线形成的螺纹称为单线螺纹,沿轴向等距分 布的两条或两条以上的螺旋线形成的螺纹称为多线螺纹。
机械设计基础课后习题和的答案解析
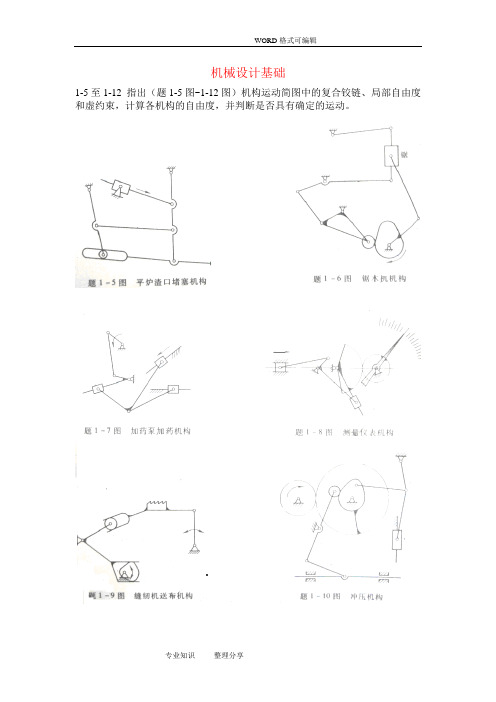
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
贵州大学机械设计课程教案第9章链传动

第十四章 链传动一、 选择题14-1 按链传动的用途,套筒滚链子和齿形链属于___.(1)传动链 (2)起重链 (3)曳引链14-2 相比而言,___传动时具有工作平稳、噪声小、允许链速较高、承受冲击载荷能力较好和轮齿受力较均匀的优点.(1)套筒链 (2)齿形链 (3)套筒滚子链14-3 套筒滚子链在传动中,当链条在链轮上啮入和啮出时,滚子沿链轮轮齿表面___.(1)滑动 (2)滚动 (3)滑动加滚动14-4 右图是一链轮的轴面齿形图.它是与___配用的链轮.(1)套筒滚子链 (2)齿形链 (3)成形链题14-4图14-5 套筒滚子链链轮分度圆直径等于___.(1) 180sin p z o (2)180p tg zo (3)180(0.54)p ctg z +o (4)180sin z p o14-6 在中速、中载的链传动中,链轮材料常采用___.(1)中碳钢正火 (2)中碳钢淬火,硬度大于40~45HRC (3)铸铁 (4)低碳钢、低碳合金钢表面渗碳淬火硬度为55~60HRC14-7 链传动设计中,一般链轮最多齿数限制为z max =120,是为了___.(1)减小链传动的不均匀性 (2)限制传动比 (3)减少链轮磨损后链从链轮上脱落下来的可能性 (4)保证链轮轮齿的强度14-8 链传动中,限制链轮最少齿数的目的是为了___.(1)减少传动的运动不均匀性和动载荷 (2)防止链节磨损后脱链 (3)使小链轮轮齿受力均匀 (4)防止润滑不良时轮齿加速磨损14-9 链传动中,最适宜的中心距是___.(1)(10~20)p (2)(20~30)p (3)(30~50)p (4)(50~80)p14-10 设计链传动时,连节数最好取___.(1)偶数 (2)奇数 (3)质数 (4)链轮齿数的整数倍14-11 下列链传动传动比的计算公式中,___是错误的.(1) 12n i n = (2) 21d i d = (3) 21z i z = (4) 21T i T η=14-12 链传动中,链条的平均速度υ=___.(1) 11601000d n π⨯ (2)22601000d n π⨯ (3)11601000z n p ⨯ (4)12601000z n p ⨯ 14-13 多排链排数一般不超过3或4排,主要是为了___.(1)不使安装困难 (2)使各排受力均匀 (3)不使轴向过宽 (4)减轻链的重量 14-14 链传动设计中,当载荷大、中心距小、传动比大时,宜选用___.(1)大节距单排链 (2)小节距多排链 (3)小节距单排链 (4)大节距多排链 14-15 链传动只能用于轴线___的传动.(1)相交成90° (2)相交成任一角度 (3)空间90°交错 (4)平行14-16 下列具有中间挠性件的传动中,___的作用在轴上的载荷最小.(1)普通V 带传动 (2)平带传动 (3)链传动14-17 链传动中,F 1为工作拉力,作用在轴上的载荷F Q 可近似得取为___.(1)F 1 (2)1.2F 1 (3)1.5F 1 (4)2F 114-18 链传动张紧的目的主要是___.(1)同带传动一样 (2)提高链传动工作能力 (3)避免松边垂度过大而引起啮合不良和链条振动 (4)增大包角14-19 链传动的张紧轮应装在___.(1)靠近主动论的松边上 (2)靠近主动论的紧边上 (3)靠近从动轮的松边上(4)靠近从动轮的紧边上14-20 链传动人工润滑时,润滑油应加在___.(1)紧边上 (2)链条和链轮啮合处 (3)松边上二、分析与思考题14-21 与带传动和齿轮传动相比,链传动有哪些优缺点?试说明摩托车采用链传动的原因.14-22 套筒滚子链已标准化,链号为08B,20A 的链节距p 等于多少mm?后缀A 或B 分别表示什么?有一滚子链的标记是10A-2×100GB1243.1-83,试说明它表示什么?14-23 齿形链有什么特点?链号和链节距p 的关系如何?14-24 自行车上的链传动,其大、小链轮哪一个经过淬火处理?为什么?14-25 影响链传动速度不均匀性的的主要因素是什么?为什么在一般情况下链传动的瞬时传动比不是恒定的?在什么条件下瞬时传动比才是恒定的?14-26 链传动在工作时引起动载荷的主要原因是什么?能否避免?如何减小动载荷? 14-27 链传动的主要失效形式有哪些?14-28 链传动的许用功率曲线是在什么试验条件下得出来的?若设计的链传动与试验条件不同要进行哪些修正?14-29 链传动计算时,在什么工作条件下按许用功率曲线选择传动链?在什么工作条件下应进行链的静强度校核?提高链传动寿命的措施有那些?14-30 图示传动方案是否合理?为什么?题14-30图 题14-31图14-31 图示的四种链传动布置形式,当小链轮为主动轮时,它们按什么方向旋转时比较合理?三、设计计算题14-32 已知一链传动,链号为16A,小链轮齿数z 1=19,转速n 1=960r/min.试计算链条的平均速度υ、瞬时最大速度υmax 和最小速度υmin .14-33 上题如果小链轮齿数分别取为z 1=5、10、15、17、19、25、30,计算链条速度的变化率,并作出速度变化率与小链轮齿数z 1的关系曲线.(提示:链条速度变化率=max min max min 100%100%1()2υυυυυυ-⨯=⨯+V )。