新型电子罗盘在组合航向系统的应用
PNI电子罗盘系列(二维罗盘_三维罗盘)

俯仰 ≤80°时,为0.5° 重复性:0.05°rms
俯仰 ≤86°时,为1.0°
重复性:0.05° TCM-Prime 倾角补偿数字罗盘 磁感应技术 任何环境下都能保证精度
倾斜 >70°时,精度为0.8° 分辨率:0.1° 温度
分辨率:0.1° 重复性: ±0.05° 操作温度: -40° to +85° C
重复性: ±0.05° 范围±90° 存储温度: -40° to +125° C
倾斜信息 电压需求 接口:数字式RS232
高分辨率罗盘航向:0.01 °
高精度罗盘航向:2 °
非易失性存储器:当电源变化时,保持标定
多种测量模式:罗盘航向或者磁场
大测量范围: ±1100 μT (±11 Gauss)
高分辨率:0.015μT (0.00015Gauss)
数字接口
应用:
高性能磁场感知 、高性能固态导航 、测量设备 、机器人系统 、车辆探测 、消费者市场 、安全探测
PNI电子罗盘系列(二维罗盘/三维罗盘)
一、两轴罗盘 产品图片 型号 MicroMag2 V2Xe 主要技术参数及应用 特点:
双轴磁传感器模块 低功耗:来自VDC时电流小于500μA 操作电压3.2VDC
尺寸:14×11×2.8mm
大的磁场测量范围:±1100μT(±11Gauss)
倾斜 <70°时,精度为0.3° 分辨率:0.1° 睡眠模式:0.6mA
倾斜 >70°时,精度为0.5° 重复性: ±0.05° 温度
分辨率:0.1° 范围 操作温度: -40° to +85° C
电子罗盘的工作原理及校准 电子罗盘,电子指南针,android
AndroidST集成传感器方案实现电子罗盘功能电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。
随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。
而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器。
随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。
本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。
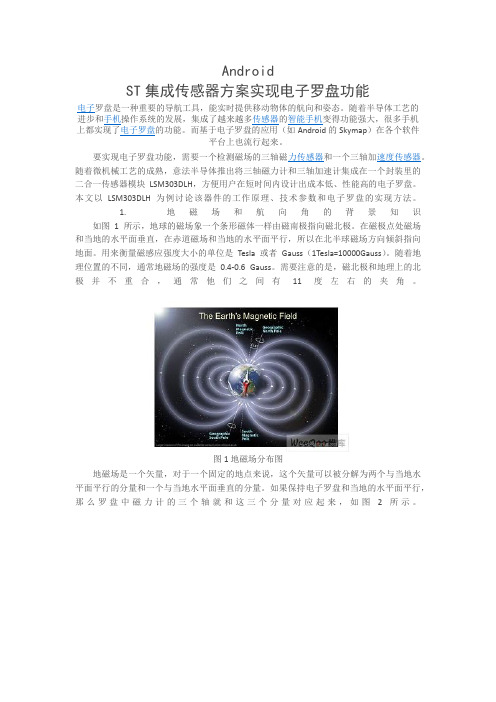
1. 地磁场和航向角的背景知识如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
图1 地磁场分布图地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。
如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示意图实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。
罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。
由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0?- 360?之间变化。
2.ST集成磁力计和加速计的传感器模块LSM303DLH2.1 磁力计工作原理在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。
Honeywell HMR3000三轴数字罗盘 磁阻传感器 说明书

电子罗盘模块按照NMEA格式,通过RS232/485串口提供航向输出(横滚、俯仰、偏航)采用Honeywell公司的固态磁阻传感器,具有快速的响应时间至20Hz,航向精度为0.5˚ ,分辨率为0.1˚。
快速响应时间小体积低功耗高精度宽的倾斜角度对铁磁物性金属进行补偿使用固态磁传感器提高了响应速度,和万向架固定式的磁通门传感器相比提高了数据更新速度。
仅为一块线路板,重量小于57克,体积为83x25x22mm,铝外壳封装。
功耗小于25mA,可长时间电池供电0.5˚ 航向精度,分辨率0.1˚ ,可适用于严格定向的应用场合。
倾斜角度为±40˚ ,适合于广泛的要求精确的应用通过对因环境中存在铁磁性金属而对地磁场造成的扭曲的补偿,提高精度。
下表显示,9针插头引脚排列,电源可以为调制的5V ,或不调制6—15V ,只有#9针或#8针中的一个,可由给定连接方法连接。
见以下:接口信号描述通信HMR3000 用简单的ASCII 字符与外部主控制器,通过 RS-232 或 RS-485 通讯。
ASCll 码的发送和接收,使用1个起始位,8个数据位(先是LSB,MSB 总为0) ,无奇偶位,和一个停止位,波特率可设置为1200,2400,4800,9600,19200或38400,HMR3000 对所有收到的带校验码的有效输入作反应。
罗盘输出HMR3000输出三种NMEA 标准格式(HDG,HDT 和XDR),三种专用格式(HPR,RCD 和CCD),及一个 ASCll 码航向输出,用于数据显示。
HDG,HDT 和HPR 是最通用格式。
$HCHDG 航向、偏差角、磁偏角$HCHDG, 85.5, 0.0, E, 0.0, E*77$HCHDT,航向、对(True)$HCHDT,271.1,T*2C$PTNTHPR,航向、俯仰和横滚$PTNTHPR,Heading,Heading Status,Pitch,Pitch Status,Roll,Roll Status*hh<cr><lf>$PTNTHPR,85.9,N,-0.9,N,0.8,N*2C名称TxD/B RxD/A GND 6-15V 5VOper/Calib(2)Run/Stop(2)Ready/Sleep(2)Cont/Reset(2)入/出Out In In In In In In In In引脚235981647描述RS-232 发送/ RS-485RS-232 接收 / RS-485电源/信号地未调理的电源电压输入调理的电源电压输入Operate/Calibrate (3) input (open=Operate)Run/Stop (3) input (open=Run)Ready/Sleep (3) input(open=Ready)Continue/Reset (3) input (open=Continue)(典型值)---6-155 ± 5%0-50-50-50-5(最小值)(1)-18-1800-20-20-20-20单位Vdc VdcVdc Vdc Vdc Vdc Vdc Vdc(最大值)(1)1818307.520202014(1) 绝对最大值(2) 沉电流:200µA (典型值), 400mA(最大值)(3) 开路输入 =高电平HMR3000 连线图——计算机RS232 到 HMR3000订货指南HMR3000-Demo-232*.....RS232HMR3000-D00-232..........RS232.........NoneHMR3000-D21-232..........RS232.........Extended BaseHMR3000-D00-485..........RS485.........NoneHMR3000-D21-485..........RS485.........Extended Base*Development Kit includes one module in alu minum enclosure, cablingwith power supply, demonstration software for PC running Windows™and User’s Manual.数值<0.5˚<1.5˚± 0.3˚0.1˚degrees/mils ±40˚±0.4˚±0.6˚±0.2˚0.1˚degree/mils ±1.0 Gauss (最大值)1 mGauss 5.0 Vdc 调理电压6~15Vdc 未调理电压35 mA@6 Vdc13 mA 2.0 mA RS-232RS-4851200 to 38400 bps NMEA 0183连续滤波0.75 oz (22g)3.25 oz (92g)1.2 x 2.95 x 0.7601.5 x 4.2 x 0.88-20 to 70˚C -35 to 100˚C 30 英寸高落下20~2000Hz Random 2 hrs/axisIPC6012IPC610航向角俯仰和横滚磁场电气接口物理环境制造指标1. 航向精度是假设地球磁体只有硬铁干扰,已通过标定进行补偿2. 标定值3. 由设计参数保证4. 典型5. 迟到或超过*器件方向角不超过75˚在工作或贮存时——可引起短暂的精度损失。
集成末端-罗盘箱在机场的应用

集成末端-罗盘箱在机场的应用摘要:在大型公共建筑中,由于空间大,净空高,为满足建筑空间功能及装饰效果的需要,各种建筑机电设备末端的安装既要满足设备功能参数又要保证建筑空间内环境安全及建筑空间功能。
昆明长水国际机场航站区采用机电功能末端单元集成(罗盘箱)施工技术将许多设备末端集中布置于罗盘箱内,集水、电、风、消防、信息、广播等功能为一体。
其中水、电集中在一个合成空间,在国内尚不多见。
如何保证各系统功能既相互独立,又满足国内各专业的规范和安全要求,是罗盘箱施工的难点。
昆明长水国际机场航站区罗盘箱施工通过深化设计、精细施工、末端顺序调试,最终在国内首次实现了超大空间机电末端功能单元的集成。
关键词:机电功能末端集成;罗盘箱;深化设计;末端顺序调试该工程的机电安装的各系统采用了大量具有创新意义的设计概念和技术措施来表现其独一无二的建筑功能效果。
机电功能末端集成单元(罗盘箱)的施工技术就是基于这一理念实施的。
1.电集机成单元(罗盘箱)的功能昆明长水国际机场航站区机电集成单元(罗盘箱)是一个机电专业齐全并集中布置的机电设备单元,内部容纳了通风空调送回风风道、消防水管线、消火栓、灭火器等设施,同时还包括了强、弱电竖井、配电盘、智能建筑模块箱等电气设施。
罗盘箱四角为穿孔压型铝板构造,内部安装柱状扬声器。
底部为压型铝踢脚板,布置电源插座等接口,顶面开可拆卸百页,侧面开送风口。
除了满足必要的建筑功能外,还有与许多服务功能结合起来的用途,外表皮彩釉玻璃饰面集成了广告、电子地图、标识、时钟、登机显示屏、安防监控摄像头等。
它的主要优点是消除大厅内与结构功能无关的隔墙、辅助吊项、吊支桁架、竖井等,减少机电设备及管道空间占用率,在航站楼诸如办票厅、候机厅等大空问区域可以将机电设备各系统集中布置,将机电各功能区集中,同时可以增加建筑空间。
在美学和功能巧妙结合的同时极大地缩减了机电设备对建筑空问的干扰,创造了全新的室内效果。
昆明长水国际机场航站区罗盘箱主要分布在二层、三层、四层,从l型到9型共有9个形式,其中1型、2型、4型罗盘箱为一层结构;3型、5型、6型、9型罗盘箱为两层结构;7型、8型罗盘箱为三层结构。
罗盘的用途和使用方法
罗盘的用途和使用方法罗盘的用途和使用方法什么是罗盘?罗盘是一种指南针,用于测量和指示地球上物体之间的方位关系。
它是古老而重要的导航工具,可以帮助人们确定方向。
罗盘的用途罗盘有着广泛的用途,以下是几个常见的应用场景:1.旅行导航:在旅行中,罗盘可以帮助人们确定方向,找到正确的路径,避免迷路。
2.探险和远行:对于探险家、登山爱好者和远行者来说,罗盘是必备工具。
它可以帮助他们确定目标的方向,探索未知领域。
3.军事和战略:在军事领域,罗盘是军人的必备工具。
它可以帮助军队确定行进方向,制定战略和战术。
4.室内布局和地图制作:在设计室内布局和绘制地图时,罗盘可以用来确定方向和角度,保证准确性。
罗盘的使用方法以下是一些常见的罗盘使用方法:•罗盘的基本结构:罗盘通常由一个指针和一个刻度圆盘组成。
指针指向地磁北极,刻度圆盘上有360度的刻度。
•寻找方向:拿起罗盘时,确保它平放并保持稳定。
指针会指向地磁北极,而刻度盘上的刻度表示方位。
通过观察指针和刻度盘上的数字,可以确定所处的方向。
•考虑磁偏角:在使用罗盘时,需要考虑磁偏角的影响。
磁偏角是地磁场与地理北极之间的角度差异。
对于不同的地区和时间,磁偏角会有所不同。
如果有磁偏角的数据,需要根据实际情况进行修正。
•校准罗盘:罗盘需要定期进行校准以保持准确性。
一种简单的校准方法是将罗盘放置在平坦的表面上,确保指针和刻度盘上的刻度对齐。
•使用辅助工具:除了罗盘本身,还可以借助一些辅助工具来提高测量的准确性。
例如,使用地图来帮助确定目标方向,或使用直尺/尺度来测量移动距离。
总结罗盘是一种重要的导航工具,具有广泛的用途。
通过正确使用罗盘,人们可以确定方向,避免迷路,并在各种活动中获得更好的导航体验。
记住校准罗盘,并考虑磁偏角的影响是保持准确性的关键。
无论是探险旅行还是室内布局规划,罗盘都是一个不可或缺的工具。
罗盘的用途和使用方法(续)专业领域中的罗盘应用除了日常生活中的应用,罗盘在一些专业领域也扮演着重要的角色:•海上导航:在海上航行时,船舶需要依靠罗盘确定航向,尤其是在没有GPS信号的情况下。
电子罗盘使用方法
电子罗盘使用方法
电子罗盘是一种利用电子技术来测量方向的仪器,它在航海、
航空、野外探险等领域都有广泛的应用。
下面我们将介绍电子罗盘
的使用方法,希望能帮助大家更好地使用这一便捷的工具。
首先,使用电子罗盘前需要确保它处于正常工作状态。
在使用前,我们应该检查电子罗盘的电池是否有电,以及仪器是否受到了
磁场干扰。
通常情况下,电子罗盘会有自检功能,可以通过按下特
定的按钮或操作来进行自检,确保仪器正常工作。
接下来,我们需要了解如何正确地使用电子罗盘来测量方向。
在使用电子罗盘时,我们应该尽量远离有磁场干扰的物体,以免影
响测量结果。
在测量时,我们应该将电子罗盘水平放置,并等待一
段时间,直到仪器稳定下来,然后才进行测量。
在测量过程中,应
该尽量保持仪器稳定,避免出现晃动或震动,以确保测量结果的准
确性。
此外,电子罗盘在使用过程中还需要注意一些注意事项。
首先,我们需要注意保护电子罗盘,避免碰撞或摔落,以免损坏仪器。
其次,在使用过程中,应该避免将电子罗盘暴露在强磁场或电磁干扰
的环境中,以免影响测量结果。
最后,在使用完毕后,应该及时将电子罗盘存放在干燥通风的环境中,避免长时间存放在潮湿或高温的环境中,以免影响仪器的使用寿命。
总的来说,电子罗盘是一种非常实用的测量工具,通过正确的使用方法,可以为我们的工作和生活带来很大的便利。
希望大家在使用电子罗盘时,能够按照上述方法进行操作,确保测量结果的准确性,同时也要注意保护好仪器,延长其使用寿命。
祝大家使用愉快!。
使用HMC5883L-3轴数字罗盘传感器计算航向角
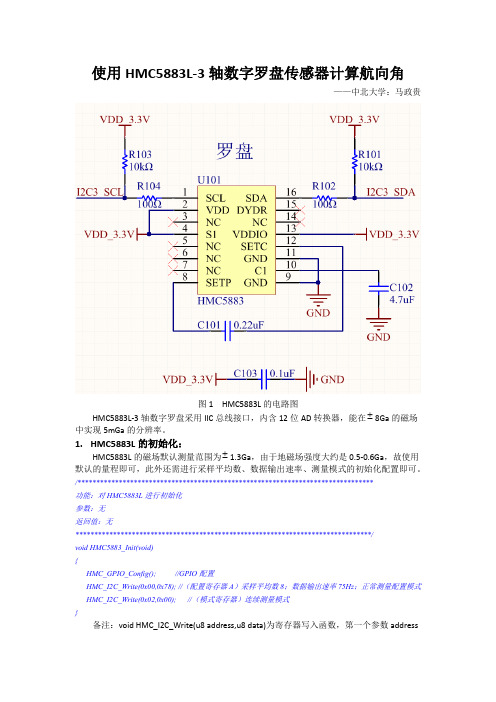
使用HMC5883L -3轴数字罗盘传感器计算航向角——中北大学:马政贵图1 HMC5883L 的电路图HMC5883L -3轴数字罗盘采用IIC 总线接口,内含12位AD 转换器,能在8Ga 的磁场中实现5mGa 的分辨率。
1. HMC5883L 的初始化:HMC5883L 的磁场默认测量范围为 1.3Ga ,由于地磁场强度大约是0.5-0.6Ga ,故使用默认的量程即可,此外还需进行采样平均数、数据输出速率、测量模式的初始化配置即可。
/******************************************************************************* 功能:对HMC5883L 进行初始化参数:无返回值:无*******************************************************************************/ void HMC5883_Init(void){HMC_GPIO_Config(); //GPIO 配置HMC_I2C_Write(0x00,0x78); //(配置寄存器A )采样平均数8;数据输出速率75Hz ;正常测量配置模式 HMC_I2C_Write(0x02,0x00); //(模式寄存器)连续测量模式}备注:void HMC_I2C_Write(u8 address,u8 data)为寄存器写入函数,第一个参数address ±±为要写入的寄存器地址,第二个参数data 为要写入寄存器的值。
2. HMC5883L 自测:HMC5883L -3轴数字罗盘内含自测模式。
HMC_I2C_Write(0x00,0x79); //(配置寄存器A )采样平均数8;数据输出速率75Hz ;正偏压自测模式 HMC_I2C_Write(0x02,0x01); //(模式寄存器)单一测量模式通过将配置寄存器A 的最低位(MS1和MS0)从00更改为01,然后再配置为单一测量模式,即可进入自测模式。
电子罗盘使用方法

电子罗盘使用方法电子罗盘是一种用于确定方向的仪器,它利用地球的磁场来指示北方。
它可以在户外活动、航海、旅行和探险中起到重要作用。
电子罗盘不仅仅是一个指南针,它还具有许多其他功能,使其成为户外爱好者的理想工具。
在本文中,我们将探讨电子罗盘的使用方法,以便您能够充分利用它的功能。
首先,要正确使用电子罗盘,您需要了解一些基本的知识。
电子罗盘由一个指针和一个刻度盘组成。
指针指向地球的磁北极,而刻度盘上的刻度用于测量方位角。
基本的方位包括北、东、南和西,每个方位占据90度。
例如,当指针指向刻度盘上的0度时,表示北方;当指针指向90度时,表示东方;当指针指向180度时,表示南方;当指针指向270度时,表示西方。
接下来,我们来看一下如何使用电子罗盘确定方向。
首先,您需要将电子罗盘保持平稳,避免受到磁场干扰。
然后,您需要校准电子罗盘,确保它对准地球的磁场。
校准的方法可以在电子罗盘的说明书中找到,不同型号可能存在差异。
一般来说,校准电子罗盘需要您将罗盘保持水平,并按照说明书的指示进行操作。
完成校准后,您可以开始使用电子罗盘定位方向。
要使用电子罗盘导航,您需要先选择一个目标方向。
假设您想要朝北方行进,您需要将指针对准刻度盘上的0度。
然后,慢慢转动自己的身体,直到指针指向地球的磁北极,同时保持刻度盘固定不动。
当指针指向地球的磁北极时,您就知道朝向北方了。
同样的方法适用于其他方位。
通过将指针对准刻度盘上的相应角度,您可以确定您想要前往的方向。
除了基本的定位功能,一些电子罗盘还具有其他实用的功能。
例如,一些电子罗盘配备了倾斜计功能,可以告诉您当前所处的斜坡角度。
这对于登山和徒步旅行来说非常有用,可以帮助您调整步伐和保持平衡。
另外,一些电子罗盘还具有测量高度的功能,可以帮助您确定当前位置的海拔。
此外,一些电子罗盘还可以记录您的行程和保存路径。
通过内置的GPS功能,您可以轻松追踪您的行程,并将其保存在罗盘中。
这对于定向比赛和长途跋涉的旅行者来说非常有用,可以提供准确的导航和回溯功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
HMR3300电子罗盘是一种新型的磁航向传感器,能输出航向、俯仰、侧滚三个方向上的姿态数据,可以满足小型航向测量系统设计的要求。
但该模块却易受外界干扰磁场的影响,因此,本文提出了一种电子罗盘和角速度陀螺配合使用的组合航向系统,并论述了HMR3300在该系统中的应用。
新型电子罗盘在组合航向系统的应用q邱丹黄圣国/南京航天航空大学面站的不同而不同。
2.3PC.ACARS-EG模块的主要功能及应用PC.ACARS-EG模块大大增强了VHF 便携式AC ARS实验站(PATS)的功能和用途。
它为系统提供了一个封闭的环境,来仿真真实的地空数据链传输。
图2表示了由两台PATS系统构成的封闭环境(最好是屏蔽无线电的实验室),其中一台模拟飞机或飞机群,另一台模拟地面站或多地面站。
EG可以让用户根据ARINC618协议规定的格式对报文进行编辑,并提供了检测功能,当用户输入的字符不符合ARINC618协议时会提醒用户输入错误,用户则可以选择修正错误或者忽略错误。
通过用户输入错误的报文字段并选择忽略错误可以模拟实际过程中非法报文传输的情况。
系统会根据用户的输入自动计算出BCS校验码并添加到报文的BCS字段,用户同样可以根据情况选择自己添加BCS字段,这样可以模拟传输过程中的BCS校验错误的情况。
另外,EG为报文提供了两种发送方式,一种是报文发送前首先加入发送队列,发送对列按照F-IFO的方式进行发送,队首的报文未接收到ACK确认则重复发送,后面的报文必须等待。
另一种是报文发送不经过发送队列直接发送并且在发送下一条报文时不必等到有效的ACK确认。
用户通过把编辑好的报文加入EG环境后,打开EG即可仿真地空数据链的传输。
通过仿真,真实的再现整个地空数据链传输的场景,为研究地空数据链的利用率以及利用地空数据链进行实时监控的适应性提供了基础。
3结论本文针对目前国内应用地空数据链的现状,着重介绍了VHF便携式ACARS实验站(PATS)组成结构、基本功能及应用前景,并希望通过对该系统的研究和使用切实的帮助航空公司提供对飞机的实时监控和远程监控能力。
t引言磁航向系统是一种能在任意姿态下测量飞机、车辆或船舰航向的装置。
考虑到成本、体积、性能等因素,角速度陀螺和电子罗盘一直都被广泛地应用在磁航向系统中。
角速度陀螺在短时间工作内的测量精度比较高,但由于惯性原理,长时间工作后,它的航向误差会无限增大,影响测量结果;并且陀螺在使用之前必须进行初始校对,这是比较费时费力的部分,如果有误差更会影响到整个系统的精度。
相比而言,数字磁罗盘的优势就比较明显,它能够自动寻北,也能够提供满足一般要求的定向精度,其工作原理为地球磁场,提供的是绝对航向而非航向变化率。
从这方面来讲,以电子罗盘代替角速度陀螺提供航向信息是必然趋势。
但是由于自身结构上的缺陷,电子罗盘的航向输出却极易受外界干扰磁场的影响而使精度降低。
因此,如何做到优势互补,研制出一种可以提供精确航向信息的系统,这对磁航向系统的研究是很有意义的。
因此,本人提出了一种由电子罗盘和角速度陀螺组成的小型组合航向系统,并着重论述了前者在该系统中的应用。
1HMR3300电子罗盘组件1.1电子罗盘原理设电子罗盘有两个相互垂直的轴,分别称为OX轴和OY轴(图1)。
分别沿这两个轴安装两个测量地球磁场方向的磁传感器S X和S Y。
磁北方向为ON,磁航向定义为从ON到OX顺时针转过的角度,用U表示。
则磁传感器S X和S Y测出的磁场分量为H X=H O cos U(1)H Y=-H O sinU(2)其中,H O 是地磁场的水平分量。
所以航向角U 就可按式求出U=-arctan(H Y /H X )(3)上述基本原理仅适用于载体处于水平状态,同时周围还没有其它铁磁物质影响的理想情况。
但在实际工程中,这些罗盘组件经常要安装在载体上,很难满足水平放置的条件,周围也难免会有其它铁磁物质存在,所以必须经过误差补偿。
1.2HMR3300结构Hone y w ell 公司HMR3300是用于导航和制导系统的电子罗盘解决方案模块。
主要由磁阻传感器、倾斜角传感器、激励放大、脉冲电路、数据转换、微控制器和其他外围电路等组成。
其中,三轴混合磁阻传感器测量3个轴向角度变化所引起的磁场变化,根据这个变化和倾斜角传感器所测量的水平角度,产生倾斜补偿的3个轴向角度变化数据。
而内部的单片机用来控制传感器的测量时序,能及时获得当前载体的航向和水平姿态。
工作流程主要包括以下几部分:(1)根据磁阻传感器工作原理,用仪表放大器对其输出信号进行放大;(2)A/D 转换器进行模数转换;(3)微控制器实现数字信号处理,误差补偿和数据通讯。
正常工作状态下,HMR3300模块可以有两种输出模式:一种是方向输出模式,分别输出航向角、俯仰角和侧滚角;另一种是磁场计输出模式,分别输出3个方向的磁场强度,根据实际需要可任选其中一种。
该模块用简单、异步的ASCII 码协议与外部主机进行通信,当接收和发送数据时,每个字符10位,1个启始位,8个数据位(低位在前)和一个停止位,无奇偶校验位。
波特率可为:2400b p s 、4800b p s 、9600b p s 和19200b p s,一般选用9600b p s 和19200b p s 两种。
HMR3300模块的航向精度可达1b ,分辨率达到0.1b ,响应速度为8Hz 。
该模块具有?60b 倾角(俯仰/侧滚)的测量范围,重量轻,且外形尺寸比较小(25mm @37mm @10mm)。
综上所述,HM R3300不仅可以采集航向数据,而且可以通过应答方式与主系统进行通信,同时还能调整自身内部的行为,具备一定的误差补偿能力,因此,比较适合应用于无人机、轮船和车辆等多种导航和定位系统中。
2在组合航向系统的应用如前所述,本组合航向系统采用HMR3300电子罗盘组件和角速度陀螺作为传感器部分,此外,还包括微处理器、模/数转换部分及其它外围电路。
系统框图2。
系统中,微处理器选择Cygnal 公司生产的系统级单片机C8051F005,这主要是从该处理器的体积、运行速率及其强大的辅助功能等方面考虑的。
A/D 采用AD 公司推出的16位2-$A/D 转换器AD7705,它具有分辨率高、动态范围广、自校准等特点,并且带有增益可编程放大器,可通过软件编程来直接测量传感器输出的各种微小信号,因此非常适合于工业控制、仪表测量等领域。
作为航向角测量的补充,角速度陀螺采用的是英国航天公司和日本住友精密工业公司合作的产品CRS03。
将HM R3300模块应用到组合航向系统中,需要注意两点:第一要选择好安装位置。
为了准确得到航向角,必须将传感器精确地安装在载体上,并要保证传感器的三个坐标轴的方向和相应载体的坐标轴方向一致。
第二要对电子罗盘的误差进行修正。
每次在不同的磁场环境中使用该传感器之前都必须在相应环境中进行误差补偿,以消除周围磁场的影响,这一点在前面也提到过。
造成误差的因素有很多,其中罗差是传感器周围的铁磁材料引起的,是磁航向系统中的主要误差。
要想得到准确的航向,必须对罗差进行修正。
本系统采用的罗差补偿方法是八位置最小二乘法,由于罗差呈现一定的周期性,因此使用三角函数来拟合罗差是比较合适的。
此种方法采用的是一种基于傅立叶函数的罗差模型,校正时需要由标准罗盘提供航向基准。
罗差模型如下$U =A +B sina U i +C cos U i +D sin2U i +E cos2U i(4)U *=U i -$U(5)式中,U 为载体的基准航向角;U i 为磁传感器指示的航向;U *是校正后航向角;$U 是罗差。
A 、B 、C 、D 、E 为标定过程中得到的罗差补偿系数。
具体的工作流程如下:(1)首先将数字磁罗盘放在回转台上调整水平,然后取角间距相同的8个试验点旋转罗盘一周,分别进行航向角测试,获得8组数据。
(2)根据最小二乘原理,得罗差补偿系数A 、B 、C 、D 、E 。
(3)得到补偿系数后,便可由式(4)和(5)进行磁航向补偿运算,得到较精确的航向角。
3结果与结论为了检验系统工作效果,本人将该系统固定在回转台上进行仿真实验,图3是某次仿真结果。
从实验结果我们可以看出:该组合航向系统测得的载体航向角具有较高的精度,误差幅值最大只有0.7b ,该系统具有体积小、成本低、可靠性高和使用方便等特点,适合应用在无人机、舰船和车辆等多种导航和定位系统中。
HMR3300电子罗盘组件在组合航向系统中的应用,不仅解决了惯性导航系统中的长时间误差累积问题,也解决了初始校准问题,并在工程实践中得到了检验。
因此,随着电子罗盘性能和精度的进一步提高,必有更多的磁航向测量系统需要这种智能的磁传感器。
t注:(1)图形的横坐标表示真实航向角,而纵坐标表示的是航向角误差。
(2)实验过程中,会不定时的在系统周围放置磁铁用来模拟瞬间磁场干扰。