线性系统理论大作业小组报告-汽车机器人建模
线性系统理论Matlab实践仿真报告
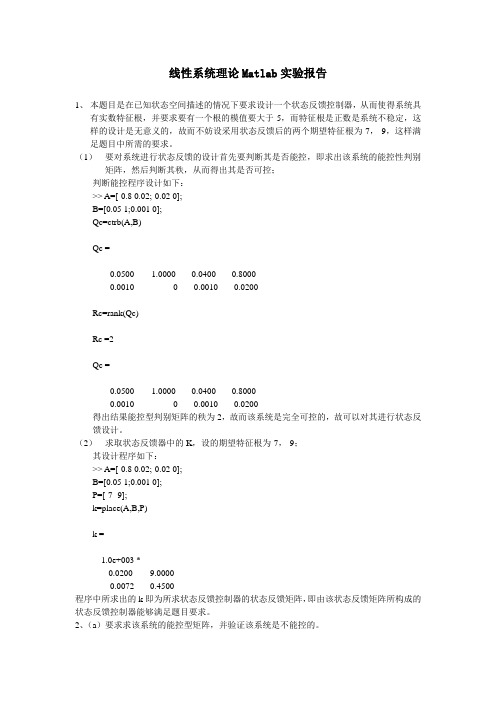
线性系统理论Matlab实验报告1、本题目是在已知状态空间描述的情况下要求设计一个状态反馈控制器,从而使得系统具有实数特征根,并要求要有一个根的模值要大于5,而特征根是正数是系统不稳定,这样的设计是无意义的,故而不妨设采用状态反馈后的两个期望特征根为-7,-9,这样满足题目中所需的要求。
(1)要对系统进行状态反馈的设计首先要判断其是否能控,即求出该系统的能控性判别矩阵,然后判断其秩,从而得出其是否可控;判断能控程序设计如下:>> A=[-0.8 0.02;-0.02 0];B=[0.05 1;0.001 0];Qc=ctrb(A,B)Qc =0.0500 1.0000 -0.0400 -0.80000.0010 0 -0.0010 -0.0200Rc=rank(Qc)Rc =2Qc =0.0500 1.0000 -0.0400 -0.80000.0010 0 -0.0010 -0.0200得出结果能控型判别矩阵的秩为2,故而该系统是完全可控的,故可以对其进行状态反馈设计。
(2)求取状态反馈器中的K,设的期望特征根为-7,-9;其设计程序如下:>> A=[-0.8 0.02;-0.02 0];B=[0.05 1;0.001 0];P=[-7 -9];k=place(A,B,P)k =1.0e+003 *-0.0200 9.00000.0072 -0.4500程序中所求出的k即为所求状态反馈控制器的状态反馈矩阵,即由该状态反馈矩阵所构成的状态反馈控制器能够满足题目要求。
2、(a)要求求该系统的能控型矩阵,并验证该系统是不能控的。
设计程序:>> A=[0 1 0 0 0;-0.1 -0.5 0 0 0;0.5 0 0 0 0;0 0 10 0 0;0.5 1 0 0 0];>> B=[0;1;0;0;0];>> C=[0 0 0 1 0];>> Qc=ctrb(A,B)Qc =0 1.0000 -0.5000 0.1500 -0.02501.0000 -0.5000 0.1500 -0.0250 -0.00250 0 0.5000 -0.2500 0.07500 0 0 5.0000 -2.50000 1.0000 0 -0.1000 0.0500>> Rc=rank(Qc)Rc =4从程序运行的结果可得,系统能控型判别矩阵的秩为4,而系统为5阶系统,故而就验证了该系统为不可控的。
系统建模与仿真实验报告extendsim
系统建模与仿真实验报告院系:管理科学与工程学院专业:质量与可靠性工程班级:1005104学号:100510432姓名:谢纪伟实验目录一.问题描述.二.系统数据.三. 建立过程的简单流程图.四.模型实体设计.五. 建立模型.六.运行模型.七.实验改进.八.结果分析.实验报告一.问题描述.电路板生产商要引入一个新产品,需要适当扩大现有生产线的产能,因此对现有生产线进行研究,经提前分析,发现生产过程存在瓶颈,现在对此生产线进行建模,并通过用extendsim建立的模型所得到的数据对现有生产线进行分析,并通过分析得到解决问题的办法。
二.系统数据.1.根据确定的时间表,5种型号电路板按照固定批量送入生产线中,时间表每隔120min重复一次,如下表所示:电路板种类在...min进入批量电路板种类在...min进入批量1 0 20 5 80 252 20 30 1 120 203 40 25 2 140 304 60 30 ………………进料时间表2.第一步操作是通过一台清洁工作站,每一个电路板需要至少36s,至多54s 的时间,一般情况需要48s。
3.清洁后的电路板装入自动插件机中,这台机器最多能同是处理6个电路板,每个板耗时5min。
4.当完成大部分标准插件的工作,电路板被置于一个10m的传送带上,通过波峰焊接机。
传送带上能放下30个电路板,每分钟移动1米。
5.此外,有三个工作站,用来插件机无法完成的非标准元件。
这个操作的耗时量根据板的种类而不同,如下表:电路板种类处理时间(min)电路板种类处理时间(min)1 2.5 4 3.02 2.0 5 2.03 2.5非标准元件的处理时间6.最后一步是高温加速老化试验,在这个过程中,电路板被组合成24个一组,放入烤箱中,循环通电20min。
三.建立过程的简单流程图电路板清洁自动插件波峰焊非标准插件非标准插件非标准插件高温老化离开四.模型实体设计.模拟电路板到达模拟缓冲器模拟插件机模拟convey item模拟非标准插件机三个物体汇合在一个通道将24个电路板组成一个批量对成批的电路板进行高温老化将成批的电路板还原成单独的电路板将加工后的电路板输出五.建立模型.1.定义全局单位时间.搭建模型从选择合适的全局时间单位开始。
汽车三维建模虚拟仿真实验.docx

汽车三维建模虚拟仿真实验
一、实验目的
二、实验内容
三、实验报告
四、实验过程
五、实验操作
BACK,
、实验目的和要求
目的:
通过汽车三维建模实验,使学生较清楚地了解汽车整体结构,各基本总成的作用、结构特点、工作原理等方面的知识,为学好本专业后续专业课打下良好的基础;并及时了解国内外汽车发展的新结构、新技术。
主要目的是在培养学生管好、用好、修好汽车的能力方面打下良好的基础,同时也为分析理解汽车新结构创造条件,培养学生动手、解决实际问题的能力。
要求:每个同学能独立完成底盘构造仿真(多次练习)
、实验内容
1、对所给的汽车三维部件模型,分析汽车各系统的工作原理。
2、对该汽车部件模型进二维草图绘制、三维造型模块的装配拆卸模
拟。
汽车三维建模仿真实验
三、实验报告
1、【实验记录、数据处理】部分:将应用proe软件实现汽车三维构造仿真实验的过程、主要操作写下来,文字和图(截屏)相结合的形式表示,注意简明扼要;
2、实验结果分析及思考题:
实验思考题:1、汽车部件模型二维草图绘制要求;
2、三维造型模块的装配关系。
汽车三维建模仿真实验a ■
四、实验过程
1、汽车部件模型二维草图的绘制;
2、三维造型模块的模拟拆装。
汽车三维建模仿真实验
五、实验操作
1、创建各零件模型
2、由“新建”-“组件”进入装配界面
3、创建装配体
4、移动、匹配、对齐、相切等操作关系
5、进行干涉检查。
汽车领域人工智能训练师实习报告

汽车领域人工智能训练师实习报告英文版Internship Report: Artificial Intelligence Trainer in the Automotive IndustryIntroductionAs the world rapidly transitions towards technology-driven advancements, the automotive sector has witnessed significant changes. One such transformation is the integration of Artificial Intelligence (AI) in vehicle design, manufacturing, and operations. During my internship as an AI Trainer in the automotive industry, I had the opportunity to gain hands-on experience in training AI models for various automotive applications.Roles and ResponsibilitiesData Collection and Annotation: I was responsible for collecting and annotating vast amounts of data, which was crucial for training AI models. This involved marking images,videos, and sensor data to identify features and patterns relevant to the automotive domain.Model Training and Optimization: I trained various AI models, including deep learning algorithms, using the annotated data. My focus was on improving model accuracy and efficiency while reducing overfitting and computational costs.Model Evaluation and Testing: I conducted rigorous evaluation and testing of the trained models to ensure their performance met the required standards. This involved testing the models on real-world datasets and simulating various scenarios to assess their reliability and adaptability.Documentation and Reporting: I documented all the training procedures, results, and learnings, which were later presented in reports to the management. This helped in tracking the progress of the AI models and making informed decisions about their deployment.Challenges and SolutionsData Imbalance: One of the major challenges I faced was dealing with imbalanced datasets, which affected model accuracy. To address this, I implemented oversampling and undersampling techniques to balance the data distribution.Computational Resources: Training AI models requires significant computational resources. To overcome this challenge, I utilized cloud computing services and optimized the code to reduce training time and costs.Model Generalization: Ensuring that the trained models could generalize well to real-world scenarios was another challenge. To address this, I employed techniques such as regularization and transfer learning to improve model generalization.ConclusionMy internship as an AI Trainer in the automotive industry provided me with invaluable experience in training and optimizing AI models for real-world applications. It not only helped me understand the complexities of AI in the automotivedomain but also gave me insights into the challenges and solutions involved in its deployment. This experience has significantly broadened my knowledge and skills in AI and has prepared me well for future career opportunities in this field.中文版实习报告:汽车领域人工智能训练师引言随着全球快速迈向技术驱动的发展,汽车行业也见证了巨大的变革。
数学建模实验报告汽车

一、实验背景随着汽车行业的快速发展,汽车总装线配置问题成为汽车生产过程中的关键问题。
合理的总装线配置可以提高生产效率、降低生产成本,并保证产品质量。
本文针对某汽车公司的汽车总装线配置问题,运用数学建模方法进行分析和求解。
二、问题分析1. 汽车总装线配置目标(1)提高生产效率,缩短生产周期;(2)降低生产成本,提高企业利润;(3)保证产品质量,提高市场竞争力。
2. 汽车总装线配置约束条件(1)品牌、配置、动力、驱动、颜色五种属性需按顺序排列;(2)四驱汽车连续装配数量不得超过2辆;(3)两批四驱汽车之间间隔的两驱汽车的数量至少为1辆;(4)每天白班和晚班各装配230辆汽车。
三、数学建模1. 模型假设(1)汽车总装线各工序时间相等;(2)汽车总装线各工序之间不存在瓶颈;(3)汽车总装线各工序生产能力满足生产需求。
2. 模型建立(1)建立汽车总装线配置优化模型目标函数:最小化总生产成本约束条件:① 品牌顺序:A1在前,A2在后;② 配置顺序:B1、B2、B3、B4、B5、B6;③ 动力顺序:汽油、柴油;④ 驱动顺序:两驱、四驱;⑤ 颜色顺序:黑、白、蓝、黄、红、银、棕、灰、金;⑥ 四驱汽车连续装配数量不超过2辆;⑦ 两批四驱汽车之间间隔的两驱汽车数量至少为1辆;⑧ 每天白班和晚班各装配230辆汽车。
(2)模型求解采用多目标规划思想,将目标规划问题分解为单目标规划问题,分别根据品牌、配置、动力、驱动、颜色的优先级依次求解。
具体步骤如下:① 根据品牌优先级,对A1和A2品牌汽车进行排序;② 根据配置优先级,对B1、B2、B3、B4、B5、B6配置汽车进行排序;③ 根据动力优先级,对汽油和柴油汽车进行排序;④ 根据驱动优先级,对两驱和四驱汽车进行排序;⑤ 根据颜色优先级,对黑、白、蓝、黄、红、银、棕、灰、金颜色汽车进行排序;⑥ 根据排序结果,对汽车总装线进行配置。
四、实验结果与分析1. 实验结果通过数学建模和求解,得到了汽车总装线的优化配置方案,包括品牌、配置、动力、驱动、颜色的排列顺序。
zaigai 汽车系统动力学报告
汽车系统动力学课程学习(MATLAB)小组报告指导教师:杨树军组别:第五组组长:陈全祥 S150********组员:赵建兵S150********魏志斌 S150********魏庆 S150********刘维 S150********刘志雷 S150********2015年12月11日一、纵向动力学性能分析1、三点插值法确定发动机外特性方程,该方程的曲线是一个二次曲线,方程如下:Me=(n-ne1)(n-ne2)Te3/(ne3-ne1)(ne3-ne2) + (n-ne1)(n-ne3)Te2/(ne2-ne1)(ne2-ne3)+ (n-ne2)(n-ne3)Te1/(ne1-ne2)(ne1-ne3)曲线如下:2、计算最高车速最高车速可用驱动力行驶阻力平衡图求解。
各档位下的驱动力曲线和行驶阻力曲线的交点所对应的车速即为该车辆的最高车速。
行驶阻力—滚动阻力—空气阻力—驱动力注:在求最高车速时不能直接用最高档的驱动力等于行驶阻力得出最高车速,因为有些车辆的最高车速的档位不一定是最高档。
汽车最高车速=92.2736()3、最大爬坡度一档时候汽车有最大爬坡度。
一档最大驱动力阻力利用,解出的值。
本程序中利用图像法得到交点,交点对应的横坐标就是最大爬坡角度。
汽车最大爬坡角=4、计算各档的最大加速度当汽车在平直道路上加速时可以忽略道路阻力和空气阻力,则有:如图所示:1.6713 1.2590 0.9348 0.6731 0.4627 0.3050 0.1908 0.1069二、基于MATLAB的单轮模型ABS控制仿真1 动力学建模 1.1 单轮模型某车辆简化后的单轮制动力模型如图所示。
其中单轮质量为,车轮滚动半径为,车轮转动惯量为,车轮旋转角速度为,车轮中心前进速度为,地面制动力为,作用于车轮的制动力矩为。
忽略空气阻力和车轮滚动阻力,则系统的运动方程如下: (1)(2)公式中,地面制动力等于作用于车轮的法向反力与路面附着系数的乘积,其中为制动滑移率的函数。
汽车模型制作实训报告
一、实训背景随着汽车工业的快速发展,汽车模型制作在汽车设计、广告宣传、教学研究等领域扮演着越来越重要的角色。
为了提高学生的专业技能和实践能力,我们开展了汽车模型制作实训课程。
本次实训旨在让学生了解汽车模型制作的基本流程,掌握汽车模型制作的技巧,提高学生的动手能力和创新意识。
二、实训目的1. 了解汽车模型制作的基本原理和流程;2. 掌握汽车模型制作的各项技能,如切割、焊接、喷漆等;3. 培养学生的团队协作能力和创新意识;4. 提高学生的审美能力和动手实践能力。
三、实训内容本次实训主要包括以下几个部分:1. 汽车模型设计2. 材料准备与切割3. 模型组装与焊接4. 模型涂装与修饰5. 作品展示与评价四、实训过程1. 汽车模型设计在实训初期,我们首先进行了汽车模型设计。
学生根据所学知识,结合自己的兴趣和创意,设计了不同的汽车模型。
设计过程中,我们注重培养学生的创新意识和审美能力。
2. 材料准备与切割在设计完成后,我们进入了材料准备与切割阶段。
学生根据设计图纸,选用合适的材料,如塑料、金属、木材等。
在切割过程中,我们要求学生掌握切割工具的使用方法,确保切割精度。
3. 模型组装与焊接在材料切割完成后,我们进行了模型组装与焊接。
学生根据设计图纸,将各个部件进行组装,并使用焊接技术将它们连接在一起。
在焊接过程中,我们强调焊接质量和安全操作。
4. 模型涂装与修饰组装完成后,我们进入了模型涂装与修饰阶段。
学生根据设计要求,选择合适的颜色和涂料,对模型进行涂装。
在涂装过程中,我们要求学生掌握涂装技巧,确保涂装效果。
5. 作品展示与评价最后,我们进行了作品展示与评价。
学生将制作的汽车模型进行展示,并邀请老师和其他同学进行评价。
评价内容包括模型的外观、结构、创新性等方面。
五、实训成果通过本次实训,学生掌握了汽车模型制作的基本流程和技能,取得了以下成果:1. 设计并制作了不同风格的汽车模型;2. 提高了学生的动手能力和创新意识;3. 培养了学生的团队协作能力;4. 增强了学生的审美能力。
汽车机器人现场实训报告
一、实训背景随着科技的不断发展,汽车行业也迎来了前所未有的变革。
为了更好地适应这一趋势,我国许多高校纷纷开设了汽车相关专业,旨在培养具备汽车研发、制造、维修等能力的高素质人才。
在此背景下,汽车机器人现场实训应运而生。
本次实训旨在让学生深入了解汽车机器人的工作原理、操作流程以及在实际生产中的应用,提高学生的实践能力和创新能力。
二、实训目的1. 使学生掌握汽车机器人的基本原理和操作方法;2. 了解汽车机器人在实际生产中的应用;3. 培养学生的动手能力、团队协作能力和创新能力;4. 为学生今后从事汽车行业相关岗位打下坚实基础。
三、实训内容1. 汽车机器人概述(1)汽车机器人简介:汽车机器人是集机械、电子、计算机、控制、传感器等多学科技术于一体的智能机器人。
它能够在汽车生产线上完成焊接、喷涂、装配等任务,提高生产效率和产品质量。
(2)汽车机器人分类:根据应用领域和功能,汽车机器人可分为焊接机器人、喷涂机器人、装配机器人等。
2. 汽车机器人工作原理(1)传感器技术:汽车机器人通过传感器感知周围环境,实现自主导航和避障。
(2)伺服控制系统:伺服控制系统负责控制机器人的运动,实现精确的轨迹跟踪。
(3)视觉系统:视觉系统用于识别和定位工件,确保机器人能够准确完成装配任务。
3. 汽车机器人操作流程(1)安装和调试:根据实际需求,将汽车机器人安装在生产线上的合适位置,并进行调试,确保其正常运行。
(2)编程:根据任务需求,编写机器人程序,实现各项功能。
(3)运行:启动机器人,按照程序执行任务。
(4)监控和维护:实时监控机器人运行状态,确保生产顺利进行。
4. 汽车机器人在实际生产中的应用(1)提高生产效率:汽车机器人能够连续工作,大大提高生产效率。
(2)提高产品质量:机器人操作精度高,能够保证产品质量。
(3)降低生产成本:减少人工成本,提高生产效益。
四、实训过程1. 理论学习:学生通过查阅资料、课堂讲解等方式,了解汽车机器人的基本原理、操作流程和应用。
汽车工业机器人安装调试实习报告
汽车工业机器人安装调试实习报告一、实习目的随着科技的不断发展与进步,汽车工业正面临着转型升级的压力和挑战。
在这个过程中,机器人技术逐渐成为了推动产业发展的关键力量。
作为一名汽车工业机器人专业的学生,我有幸在一家汽车制造企业进行了为期三个月的实习,主要参与了汽车工业机器人的安装与调试工作。
通过这次实习,我深入了解了机器人安装调试的基本流程和方法,掌握了相关设备的操作技巧,积累了丰富的实践经验,为今后的学习和职业发展奠定了坚实的基础。
二、实习内容1. 参观公司生产线:在实习期间,我首先参观了公司的生产线,了解了汽车工业机器人在生产线的应用情况。
通过对生产线的观察和分析,我对机器人在生产线中的作用和地位有了更深入的认识。
2. 学习机器人设备安装方法:在参观生产线的基础上,我学习了机器人设备的安装方法。
包括机械结构的安装、电气设备的连接以及气路的布局等。
在安装过程中,我注重细节和精度,确保设备安装的准确性和稳定性。
3. 参与机器人调试工作:在熟悉了设备安装方法后,我积极参与了机器人调试工作。
通过调试我可以控制机器人的运动轨迹、速度和力量等参数,使其满足生产线的需求。
在调试过程中,我遇到了许多问题和困难,但通过不断学习和实践,最终解决了这些问题。
4. 学习机器人维护保养知识:除了调试工作外,我还学习了机器人维护保养的知识。
了解了日常保养的内容、方法和注意事项等。
通过学习维护保养知识,我能够更好地维护设备,延长使用寿命。
5. 了解行业最新动态:在实习期间,我还关注了汽车工业机器人的最新动态和发展趋势。
通过了解行业动态,我可以及时掌握新技术和新设备的发展情况,为自己的学习和职业发展提供参考。
三、实习收获1. 技能提升:通过实习,我掌握了汽车工业机器人安装调试的基本技能和方法,提高了自己的动手能力和实践能力。
2. 知识积累:我在实习过程中积累了丰富的实践经验,加深了对专业知识的理解和掌握程度。
3. 职业素养:通过实习,我培养了良好的职业素养和团队合作精神,提高了自己的综合素质和职业道德水平。
工程车辆机器人实训报告
一、实训背景随着我国经济的快速发展,工程车辆在基础设施建设、城市建设、环境治理等领域发挥着越来越重要的作用。
为了提高工程车辆作业效率,降低人力成本,工程车辆机器人应运而生。
为了让学生更好地了解工程车辆机器人的原理、设计与应用,我们开展了工程车辆机器人实训。
二、实训目的1. 理解工程车辆机器人的基本原理和组成;2. 掌握工程车辆机器人的设计和调试方法;3. 熟悉工程车辆机器人在实际工程中的应用;4. 培养学生的创新意识和团队协作能力。
三、实训内容1. 工程车辆机器人基本原理与组成(1)工程车辆机器人的基本原理:工程车辆机器人是一种集机械、电子、计算机技术于一体的智能设备,通过感知、决策、执行等过程实现自主作业。
(2)工程车辆机器人的组成:工程车辆机器人主要由机械结构、驱动系统、控制系统、传感器、执行器等部分组成。
2. 工程车辆机器人的设计与调试(1)机械结构设计:根据工程车辆机器人的工作环境和工作任务,设计合适的机械结构,确保机器人在工作过程中稳定可靠。
(2)驱动系统设计:选择合适的驱动方式,如电机驱动、液压驱动等,以满足工程车辆机器人的动力需求。
(3)控制系统设计:设计控制系统,实现对工程车辆机器人的实时监控和精确控制。
(4)调试:对工程车辆机器人进行调试,包括机械结构调试、驱动系统调试、控制系统调试等,确保机器人各项功能正常。
3. 工程车辆机器人在实际工程中的应用(1)隧道施工:工程车辆机器人可以用于隧道掘进、混凝土浇筑等环节,提高施工效率,降低人力成本。
(2)道路施工:工程车辆机器人可以用于路面铺设、路基处理等环节,提高施工质量,缩短施工周期。
(3)环境治理:工程车辆机器人可以用于垃圾清理、河道疏浚等环节,提高环境治理效率。
四、实训收获1. 掌握了工程车辆机器人的基本原理和组成,了解了工程车辆机器人的设计与应用。
2. 学会了工程车辆机器人的设计与调试方法,提高了动手实践能力。
3. 深入了解了工程车辆机器人在实际工程中的应用,拓宽了视野。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
审定成绩:重庆邮电大学硕士研究生课程设计报告(《线性系统理论》)设计题目:汽车机器人建模学院名称:自动化学院学生姓名:专业:控制科学与工程仪器科学与技术班级:自动化1班、2班指导教师:蔡林沁填表时间:2017年12月重庆邮电大学摘要汽车被广泛的应用于城市交通中,它的方便、快速、高效给人们带来了很大便利,这大大改变了人们的生活. 研制出一种结构简单、控制有效、行驶安全的城市用无人智能驾驶车辆,将驾驶员解放出来,是大大降低交通事故的有效方法之一,应用现代控制理论设计出很多控制算法,对汽车进行控制是非常必要的,本文以汽车机器人为研究对象,对其进行建模和仿真,研究了其模型的能控能观性、稳定性,并通过极点配置和状态观测器对其进行控制,达到了一定的性能要求。
这些研究为以后研究汽车的自动驾驶和路径导航,打下了一定的基础。
关键字:建模、能控性、能观性、稳定性、极点配置、状态观测器目录第一章绪论 (1)第一节概述 (1)第二节任务分工 (2)第二章系统建模 (2)2 系统建模 (2)2.1运动学模型 (2)2.2自然坐标系下模型 (4)2.3具体数学模型 (6)第三章系统分析 (7)3.1 能控性 (7)3.1.1 能控性判据 (7)3.1.2 能控性的判定 (8)3.2 能观性 (10)3.2.1 能观性判据 (10)3.2.2 能观测性的判定 (12)3.3 稳定性 (13)3.3.1 稳定性判据 (13)3.3.2 稳定性的判定 (14)第四章极点配置 (15)4.1 极点配置概念 (15)4.2 极点配置算法 (15)4.3 极点的配置 (16)4.4 极点配置后的阶跃响应 (17)第五章状态观测器 (18)5.1概念 (19)5.2带有观测器的状态反馈 (20)5.3代码实现 (21)5.4 极点配置和状态观测器比较 (23)第六章总结 (25)参考文献 (26)附件(设计程序) (27)第一章绪论第一节概述进入20世纪,汽车被广泛的应用于城市交通中,它的方便、快速、高效给人们带来了很大便利,这大大改变了人们的生活. 但是随着汽车数量的增加,交通事故的数量每年也不断增长,这严重威胁了人们的生命、财产安全,究其主要原因是由于驾驶员的疲劳驾驶造成的. 研制出一种结构简单、控制有效、行驶安全的城市用无人智能驾驶车辆,将驾驶员解放出来,是大大降低交通事故的有效方法之一,也是国内外研究的热点之一。
汽车机器人,其模型可简化成两轮的自行车模型,国内的学者在这方面作了很多深入的研究,应用现代控制理论设计出很多控制算法,取得很多成绩,但其中绝大多数应用环境是在室内,被跟踪轨迹已知,并且其控制方法是将车体的横向位移、纵向位移、纵向速度和转动的角速度等作为被控量,这在应用环境异常复杂城市交通系统中是难实现的。
城市环境下的无人驾驶车由于速度较慢,因此比较安全可靠,它有广阔的应用前景,短期内,可作为城市大容量公共交通(如地铁等) 的一种补充,解决城市区域交通问题,因此,城市环境下的无人驾驶车辆系统的研究已经成为目前的研究热点,但是,由于城市环境非常复杂,对感知和控制算法提出了很高的要求.第二节任务分工本设计由4位同学分工完成,每位同学的任务分工如表1-1所示:表1-1任务分工表第二章系统建模2 系统建模汽车机器人是一种非线性、多变量、强耦合、参数不确定的复杂系统,是检验各种控制方法的一个理想装置,受到广大研究人员的重视,成为具有挑战性的课题之一。
为了对其运动进行控制,就需要对汽车机器人进行数学建模。
2.1运动学模型汽车机器人其运动模型如图2-1:图2-1 汽车机器人模型模型中相关参数及意义如下:--前后轮间距离;--两前轮中心点的速度;--两后轮中心M点的速度;--前轮转向角;--为车体航向角;--后轮中心点M 距X 轴距离;--后轮中心点M 距Y轴距离。
假设两个轮子有相同的速度v(尽管在实际情况中,转弯时内轮比外轮慢),一切情况似乎只在位于车轴中心线的两个虚拟轮子上发生[1]。
如下图2-2:图2-2 汽车机器人简化模型由速度合成规则有:系统演化的基本方程:由于前轮加速度和前轮转角的角速度不能无穷大,所以有增补方程:2.2自然坐标系下模型自然坐标系的描述如下:原点: 在被跟踪轨线上的某一被测到的点;X 轴: 按右手定则垂直X 轴;Y 轴: 与过该被测点的切线重合,正方向与车体正方向相同。
图2-3自然坐标系下的汽车机器人模型在汽车的运动过程中,能给予直接控制的有两种:前轮的加速度和方向盘的角度。
此处表示前轮与汽车中轴线之间的夹角,也就是方向盘的角度;汽车的位置需要3个量来表示:为汽车中轴线与水平轴线之间的夹角;汽车的位置(汽车后桥中心的位置);以及汽车方向盘角度。
当汽车在未知道路形状时,切没有GPS可以定位时,对汽车的模型进一步研究。
此时,没有了定位系统,只能以自身建立坐标系,y失去了意义,x仍然是与边缘的距离,将上页(1)式子代入(3)(4)式,并去掉y(t),得到:2.3具体数学模型取状态变量如下:输入为:前轮加速度前轮转角角速度输出为:后轮中心点M 距X得到状态空间表达式为:,此时具体的状态空间模型为:第三章系统分析在本章中,主要对系统进行能控性、能观性及稳定性的判定。
其中,能控、能观性有三种判据,本文主要采用了秩判据和约当规范形判据来判定汽车机器人模型是否能控、能观。
在稳定性判定中,有很多判定方法,如:特征值判据、李雅普罗夫判据、变量梯度法等,而本文主要采用的是特征值及极点是否有负实部来判定系统是否稳定。
3.1 能控性能控性,如果系统内部每个状态变量都可以由输入完全影响,则系统的状态为能控。
3.1.1 能控性判据(1)能控性格拉姆矩阵判据考虑连续时间线性时不变系统,状态方程为:为完全能控的充分必要条件是,存在时刻t1>0,使如下定义的格拉姆(Gram)矩阵为非奇异。
(2)能控性秩判据对n维连续时间线性时不变系统,构成能控性判别矩阵:则系统完全能控的充分必要条件为:(3)能控性PHB秩判据对n维连续时间线性时不变系统,完全能控的充分必要条件为:或其中,为复频域,为系统特征值。
(4)能控性约当规范形判据对n维连续时间线性时不变系统,设n个特征值为为两两相异,则系统完全能控的充分必要条件为,对状态方程通过线性非奇异变换导出的约当规范形为:矩阵不包含零行向量,即的各个行向量满足:3.1.2 能控性的判定在本文汽车机器人建模的分析中,主要是用MATLAB对系统进行分析。
在判断所建模型是否能控方面。
Matlab仿真代码如下:SizeofA=size(A);Tc = ctrb(A,B); %能控性判定矩阵rTc = rank(Tc); %能控性判定矩阵的秩disp('能控性判定矩阵的秩');rTcdisp('A的维数');SizeofAif (rTc == SizeofA)disp('The system is controllable')elsedisp('The system is uncontrollable')end其代码运行结果如图3.1所示。
图3.1 能控性MATLAB判定结果由图3.1可得,矩阵A的维数和能控性判定矩阵的维数都是4,因此这个系统是能控的。
同时,本文还采用了约当规范形判据,但是由于MATLAB运行出来的约当规范形矩阵不是标准型,无法判断系统的能控性,因此,在本小节中,得出的是进行极点配置后的系统的约当规范形矩阵,如图3.2所示。
图3.2 极点配置后系统的约当规范形由图3.2可得,矩阵A分成了三个约当块。
在判断能控性时,是观察每个约当块的末行,对应的B矩阵中的相应行,组成的矩阵是否满足行满秩。
若满足,这表示系统完全能控;反之则不可控。
根据图中的A、B矩阵,易得该系统是完全可控的。
3.2 能观性能观测性,如果系统内部每个状态变量都可以由输出完全反映,则系统的状态为能观测。
3.2.1 能观性判据(1)能观测性格拉姆矩阵判据考虑连续时间线性时不变系统,状态方程为:y=Cx为完全能控的充分必要条件是,存在时刻t1>0,使如下定义的格拉姆(Gram)矩阵为非奇异。
(2)能观测性秩判据对n维连续时间线性时不变系统,构成能控性判别矩阵:11()T T T T T n TO OnCCAQ Q C A C A CCA--⎡⎤⎢⎥⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥⎣⎦或则系统完全能控的充分必要条件为:1OnCCArankQ rank nCA-⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦(4)能观测性PHB秩判据对n维连续时间线性时不变系统,完全能控的充分必要条件为:,sI A rank n s C -⎡⎤=∀∈℘⎢⎥⎣⎦或,1,2,,i I A rank n i n C λ-⎡⎤==⎢⎥⎣⎦其中,为复频域,为系统特征值。
(4)能观测性约当规范形判据对n 维连续时间线性时不变系统,设n 个特征值为为两两相异,则系统完全能控的充分必要条件为,对状态方程通过线性非奇异变换导出的约当规范形为:矩阵不包含零行向量,即的各个行向量满足:3.2.2 能观测性的判定能观测性的判定和能观性一样,也是在MATLAB 上根据程序进行仿真。
以下为Matlab 仿真代码:To = obsv(A,C); %能观性判定矩阵 rTo = rank(To); %能观性判定矩阵的秩 disp('能观性判定矩阵的秩');rTo disp('A 的维数:');SizeofA if (rTo == SizeofA)disp('The system is observable') elsedisp('The system is unobservable') end代码运行结果如图3.3所示。
图3.3 能观测性MATLAB 判定结果由图3.3可得,矩阵A 的维数和能观测性判定矩阵的维数都是4,因此这个系统是能观测的。
采用约当规范形判定能观测性与能控性的判定类似,不过它采用的是A 、C 矩阵。
此时,是观察每个约当块的首列,并取出C 矩阵中的相应列,判断组成的矩阵是否列线性无关,若满足列线性无关,则表示系统完全能观测;反之。
不能完全观测。
由图3.2中的A 、C 矩阵,容易判断出系统是完全能观测的。
3.3 稳定性稳定性也是系统的一个基本结构特性,它又可分为基于输入输出描述的外部稳定性,也称BIBO 稳定性;和基于状态空间的内部稳定性。
其中,对于灵初始条件p 维输入和q 维输出连续时间线性时不变系统,令初始时刻,则系统BIBO 稳定的充分必要条件为:真或严真传递函数矩阵G(s)所有极点均具有负实部。
对于内部稳定性,其渐进稳定的充分必要条件为:系统矩阵A 所有特征值均具有负实部,即下式成立:{}Re ()0,1,2,,i A i nλ<=3.3.1 稳定性判据 (1)特征值判据对n 维连续时间线性时不变系统,原点平衡状态即雅普罗夫意义下稳定的充分必要条件为,矩阵A的特征值均为具有非正实部即实部为零或负,且零实部特征值只能为A的最小多相式的单根。