16KW6极变频调速同步电动机的电磁方案及控制系统含外文翻译
变频调速的基本控制方式ppt课件

28
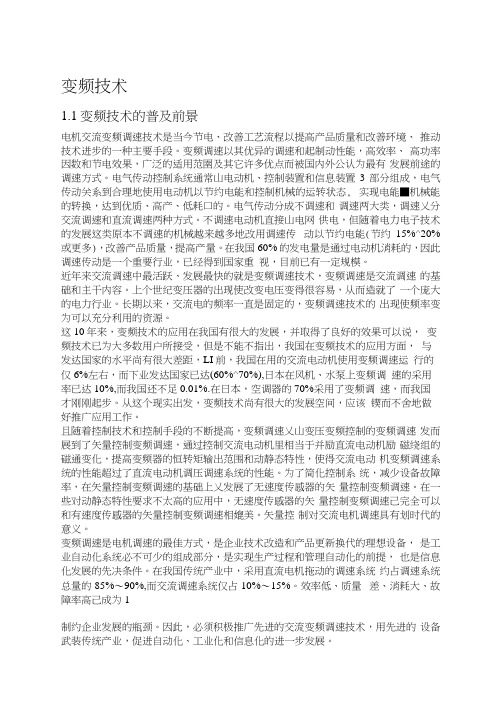
机械特性曲线
n
可见,当频率ω1提高 时,同步转速n1随之提 n1c 高,最大转矩减小,机 n1b
械特性上移;转速降落 n1a
1c 1b 1a
随频率的提高而增大, n1N 1N
1N <1a <1b <1c 恒功率调速
特性斜率稍变大,其它
形状基本相似。如右图
所示。
2024/7/16
O Te
图6-5 基频以上恒压变频调速的机械特性29
2024/7/16
22
结论
➢在恒压频比的条件下改变频率 1 时,机械特性基本上是
平行下移 ➢当转矩增大到最大值以后,转速再降低,特性就折回来 了。而且频率越低时最大转矩值越小
➢最大转矩 Temax 是随着的 1 降低而减小的。频率很
低时,Temax太小将限制电机的带载能力,采用定子压 降补偿,适当地提高电压Us,可以增强带载能力
(U漏—漏磁阻抗压降;Us—每相电压),
当Us很大时,U漏很小;可以认为Us≈Eg 。
m
US f1
C
要改变f1实现调速,则同时应改变Us来保持Φm不变。
—恒压频比控制方式
2024/7/16
12
带定子压降补偿的恒压频比控制特性
但当f1太小时,忽略U漏则误差较大,这时可以人为增 大Us进行补偿,以减小误差。
2024/7/16
30
小结
电压Us与频率1是变频器—异步电动机调速系统的两个独立
的控制变量,在变频调速时需要对这两个控制变量进行协调 控制。 在基频以下,有两种协调控制方式。采用不同的协调控制方 式,得到的系统稳态性能不同。 在基频以上,采用保持电压不变的恒功率弱磁调速方法。
2024/7/16
kdl16变频器驱动解释

培训资料,仅供参考驱动介绍V3F16ES 驱动原理:acdc.wmfACDCACDCMTr s tFilterL1L2L3V3F16es moduleElectronicsDynamic brakingMotor supply 0...300VAC 0...20 HzIntermediate circuit530...700 VDCMains supply 380...415 VACV3F驱动系统培训资料,仅供参考V3F16es 驱动介绍1/2组成:•385:A1 Drive Control Board (DCB) 驱动控制板•385:A2 Main Circuit Board (MCB) 主回路板•385:A3 Brake Control Board (BRK) 抱闸控制板•385:A4 Intermediate Circuit Board (IMC) 中间电路板•主接触器201:1,201:2,204(动态制动)•过滤器•充电电容385:C1,C2•充电电阻385:R1,R2(1k, 50w)V3F16es驱动介绍2/2内部结构培训资料,仅供参考V3F16L驱动介绍1/3驱动原理图培训资料,仅供参考V3F16L驱动介绍2/3制动电阻V3F16L驱动SEP井道控制柜KONE 3000 MonoSpace® 与KONE 3000 TranSys™ 控制柜分为两个部分一部分放到井道中,称为SEP-井道控制柜,另外一部分在顶层层门旁,称为MAP-维修操作盘培训资料,仅供参考V3F16L驱动介绍3/3 V3F16L 驱动模块组成:1. 制动器, XBR32. LCE电缆,XS33. 马达电缆,U-V-W4. 供电电缆,T1-T2-T35. LWD及马达电流,XW16. MAP测速计,XLG17. 测速计,XG18. LCECPU电缆,XL1 9.马达热敏,XT110. 制动电阻,XBRE211. 盖板12. 盖板连线13. 电缆套管孔培训资料,仅供参考V3F18/25驱动介绍1/3原理图:培训资料,仅供参考V3F18/25驱动介绍2/3V3F18驱动组成:1.制动控制模块385:A52.PCB模块385: A1, A23.电流测量板385:A34.主接触器201:1,2 & 辅助继电器 & 保险2985.直流电路电容器385:C1,C2,(C3,C4)6.EMC模块3897.变压器T18.风扇3039.动态制动接触器20410.大功率晶体管385:V1 (V3)11.三相整流桥385:V512.制动三极管385:V4培训资料,仅供参考V3F18/25驱动介绍4/3V3F25驱动组成:1.HCB:运动控制板385:A12.逆变器板385:A23.电流测量板385:A34.风扇3035.变压器896.中间直流电路电容器385:C1,C2,(C3,C4)7.大功率晶体管385:V1 (V3)8.制动三极管385:V49.二极管整流桥385:V510.(内部)制动电阻306。
逆变器中英文对照外文翻译文献

中英文对照外文翻译文献(文档含英文原文和中文翻译)逆变器1引言逆变器是一种电动装置,转换成直流电(DC),交流电流转换的AC(交流)可以在任何所需的电压和频率使用适当的变压器,开关,控制circuits.Solid状态逆变器有没有移动部件,用于广泛的应用范围从小型计算机开关电源,高压大型电力公司电力,运输散装直接电流应用。
逆变器通常用于提供交流电源,直流电源,如太阳能电池板或电池。
逆变器的主要有两种类型。
修改后的正弦波逆变器的输出是类似方波输出,输出变为零伏前一段时间切换积极或消极的除外。
它是简单,成本低,是大多数电子设备兼容,除敏感或专用设备,例如某些激光打印机。
一个纯正弦波逆变器产生一个近乎完美的正弦波输出(<3%的总谐波失真),本质上是相同的公用事业提供电网。
因此,它是与所有的交流电的电子设备兼容。
这是在电网领带逆变器使用的类型。
它的设计更复杂,成本5或10倍以上每单位功率电逆变器是一个高功率的电子振荡器。
它这样命名,因为早期的机械AC到DC转换器工作在反向,因而被“倒”,将直流电转换AC.The变频器执行的整流器对面功能。
2应用2.1直流电源利用率逆变器从交流电力来源,如电池,太阳能电池板,燃料电池的直流电转换成。
电力,可以在任何所需的电压,特别是它可以操作交流电源操作而设计的设备,或纠正,以产生任何所需的voltage Grid领带逆变器的直流送入分销网络的能量,因为它们产生电流交替使用相同的波形和频率分配制度提供。
他们还可以关掉一个blackout.Micro逆变器的情况下自动转换成交流电电网的电流直接从当前个别太阳能电池板。
默认情况下,他们是格领带设计。
2.2不间断电源不间断电源(UPS),电池和逆变器,交流电源,主电源不可用时使用。
当主电源恢复正常时,整流提供直流电源给电池充电。
2.3感应加热逆变器的低频交流主电源转换到更高频率的感应加热使用。
要做到这一点,首先纠正交流电源提供直流电源。
中文翻译-感应电动机的速度控制

外文资料译文:18-14 感应电动机的速度控制感应电动机转子的转速已由公式18-3得知:(1-s)个或任一组因子的改变都可能影响感应电动机的转速。
下面这些方法是几个采用较普遍的感应电动机转速控制方法。
交流感应电动机剖面图摘自:Prentice Hall Inc. Marathon Electric绕线式电动机调速方法:这种方法改变转差率,并且只能用于绕线式转子电动机,这种类型的控制相当于将一个电阻与直流并励电动机电枢绕组串联。
这种方法的缺点式由于在转子电路里有附加的功率损失,并且获得的电压调整率较差,效率低。
这些缺陷可以通过在转子电路中串入附加电势以代替电阻的方法改善,这种方法可以由在转子上加装一个交换器来实现,但由于造价太高一般仅用于大型电动机上。
改变极数法:利用一种特殊的设计和适当的定子绕组,就有可能改变定子极数,既而改变感应电动机的同步速度。
如果一台60Hz电动机的极数从8降到4,同步转速会从900rpm升到1800rmp。
这时在每个速度通常是得不到最合理得设计得,例如不可能只是通过简单的改变极数而使一台电动机在两种不同的速度都得到大力矩和高效率。
因此这种速度控制法由于改变一台电动机的极数所必需的复杂的开关组件而很快被淘汰。
在需要两种以上速度的场合一般不采用这种速度控制方法。
连接调速法:通过纵列的连接感应电动机,有可能获得几种运转速度,这种连接要求其中一台电动机需为绕线式电动机。
第二台可以是鼠笼式电动机或绕线式电动机。
两太电动机的定子绕组应该有同样的额定电压,感应电动机的定子绕组与第二台电动机定子绕组的连接可能会使两台电机具有相同的转向。
这样最终的转速有所有电动机的极数和来决定,这时称为直接连接。
当电动机连接后的转向相反时,最终的速度由所有电机的极数差来决定,称为差动连接。
例如:两台60Hz电动机以直接连接方式连接,绕线式电动机极数为4,另一台极数也为4,如果转差率为0.105时计算转子转速。
外文翻译文献资料

逆变器SHI TingNa, W ANG Jian1引言逆变器是一种电动装置,转换成直流电(DC),交流电流转换的AC(交流)可以在任何所需的电压和频率使用适当的变压器,开关,控制circuits.Solid状态逆变器有没有移动部件,用于广泛的应用范围从小型计算机开关电源,高压大型电力公司电力,运输散装直接电流应用。
逆变器通常用于提供交流电源,直流电源,如太阳能电池板或电池。
逆变器的主要有两种类型。
修改后的正弦波逆变器的输出是类似方波输出,输出变为零伏前一段时间切换积极或消极的除外。
它是简单,成本低,是大多数电子设备兼容,除敏感或专用设备,例如某些激光打印机。
一个纯正弦波逆变器产生一个近乎完美的正弦波输出(<3%的总谐波失真),本质上是相同的公用事业提供电网。
因此,它是与所有的交流电的电子设备兼容。
这是在电网领带逆变器使用的类型。
它的设计更复杂,成本5或10倍以上每单位功率电逆变器是一个高功率的电子振荡器。
它这样命名,因为早期的机械AC到DC转换器工作在反向,因而被“倒”,将直流电转换AC.The变频器执行的整流器对面功能。
2应用2.1直流电源利用率逆变器从交流电力来源,如电池,太阳能电池板,燃料电池的直流电转换成。
电力,可以在任何所需的电压,特别是它可以操作交流电源操作而设计的设备,或纠正,以产生任何所需的voltage Grid领带逆变器的直流送入分销网络的能量,因为它们产生电流交替使用相同的波形和频率分配制度提供。
他们还可以关掉一个blackout.Micro逆变器的情况下自动转换成交流电电网的电流直接从当前个别太阳能电池板。
默认情况下,他们是格领带设计。
2.2不间断电源不间断电源(UPS),电池和逆变器,交流电源,主电源不可用时使用。
当主电源恢复正常时,整流提供直流电源给电池充电。
2.3感应加热逆变器的低频交流主电源转换到更高频率的感应加热使用。
要做到这一点,首先纠正交流电源提供直流电源。
变频技术中英文翻译资料
变频技术1.1变频技术的普及前景电机交流变频调速技术是当今节电、改善工艺流程以提高产品质量和改善环境、推动技术进步的一种主要手段。
变频调速以其优异的调速和起制动性能,高效率、高功率因数和节电效果,广泛的适用范圉及其它许多优点而被国内外公认为最有发展前途的调速方式。
电气传动控制系统通常山电动机、控制装置和信息装置3 部分组成,电气传动关系到合理地使用电动机以节约电能和控制机械的运转状态, 实现电能■机械能的转换,达到优质、高产、低耗口的。
电气传动分成不调速和调速两大类,调速乂分交流调速和直流调速两种方式。
不调速电动机直接山电网供电,但随着电力电子技术的发展这类原本不调速的机械越来越多地改用调速传动以节约电能(节约15%^20%或更多),改善产品质量,提高产量。
在我国60% 的发电量是通过电动机消耗的,因此调速传动是一个重要行业,已经得到国家重视,目前已有一定规模。
近年来交流调速中最活跃、发展最快的就是变频调速技术,变频调速是交流调速的基础和主干内容。
上个世纪变压器的出现使改变电压变得很容易,从而造就了一个庞大的电力行业。
长期以来,交流电的频率一直是固定的,变频调速技术的出现使频率变为可以充分利用的资源。
这10年来,变频技术的应用在我国有很大的发展,并取得了良好的效果可以说,变频技术已为大多数用户所接受,但是不能不指出,我国在变频技术的应用方面,与发达国家的水平尚有很大差距,LI前,我国在用的交流电动机使用变频调速运行的仅6%左右,而下业发达国家已达(60%^70%),日本在风机、水泵上变频调速的采用率已达10%,而我国还不足0.01%.在日本,空调器的70%采用了变频调速,而我国才刚刚起步。
从这个现实出发,变频技术尚有很大的发展空间,应该锲而不舍地做好推广应用工作。
且随着控制技术和控制手段的不断提高,变频调速乂山变压变频控制的变频调速发而展到了矢量控制变频调速,通过控制交流电动机里相当于并励直流电动机励磁绕组的磁通变化,提高变频器的恒转矩输出范围和动静态特性,使得交流电动机变频调速系统的性能超过了直流电动机调压调速系统的性能。
外文翻译--步进电机运动控制系统设计

密级分类号编号成绩本科生毕业设计 (论文)外文翻译原文标题Stepper Motor Motion Control System Design 译文标题步进电机运动控制系统设计作者所在系别机械工程系作者所在专业机械设计制造及其自动化作者所在班级作者姓名作者学号指导教师姓名指导教师职称完成时间2012 年 2 月的个数严格成正比,在时间上与输入脉冲同步,因此只要控制输入脉冲的数量、频率及电动机绕组通电的相序,便可获得所需的转角、转速及转动方向。
在没有脉冲输入时,在绕组电源的激励下气隙磁场能使转子保持原有位置处于定位状态。
因此非常适合于单片机控制。
步进电机还具有快速启动、精确步进和定位等特点,因而在数控机床,绘图仪,打印机以及光学仪器中得到广泛的应用。
步进电动机已成为除直流电动机和交流电动机以外的第三类电动机。
传统电动机作为机电能量转换装置,在人类的生产和生活进入电气化过程中起着关键的作用。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
一步进电机的工作原理步进电机是一种用电脉冲进行控制 ,将电脉冲信号转换成相位移的电机 ,其机械位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成正比 ,每一个脉冲信号可使步进电机旋转一个固定的角度.脉冲的数量决定了旋转的总角度 ,脉冲的频率决定了电机运转的速度.当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
二步进电机详细调速原理步进电机的调速一般是改变输入步进电机的脉冲的频率来实现步进电机的调速,因为步进电机每给一个脉冲就转动一个固定的角度,这样就可以通过控制步进电机的一个脉冲到下一个脉冲的时间间隔来改变脉冲的频率,延时的长短来具体控制步进角来改变电机的转速,从而实现步进电的调速。
电气工程外文翻译

并联式混合动力电动汽车的驾驶性能优化控制并联式混合动力电动汽车(HEV)与一个现有单一的电动机动力总成配置相比变化不大。
然而,有一个具有挑战性的驾驶性能问题,在发动机启动时因为电动马达必须同时提供所要求的推进扭矩,并启动发动机。
因为发动机启动过程可能需要驾驶性能和快速启动之间的一个权衡。
这项研究的目标是要找到理论性能极限和相应的最优控制策略,实现这两个相互矛盾的目标之间的平衡。
首先,我们开发了一个简化的并联式混合动力发动机,离合器和车辆动力学模型来预测。
假设离合器力矩可以准确地估计,获得最佳发动机的起动控制,为了最大程度减少发动机启动时间,从而供给驱动要求转矩。
这种非线性约束的最优控制问题就解决了解析和数值两个问题。
对于一些特殊的情况,可以解析求解该优化问题,取得一个封闭形式的解决方案。
数值方法,动态规划(DP),与分析和数值解表明选择一个适当的恒定离合器压力是实现接近最佳驾驶性能的关键。
此外,DP控制策略是恒定的,从而可以实现一个完整的状态反馈控制器的形式。
关键词:混合动力电动汽车;最优控制;发动机启动;驾驶性能;发动机;分离离合器1 引言一种混合动力系统结构被广泛研究的是并联HEV 结构(P2)与单一的电动机/发电机(M / G),耦合到一个多速的传输配置上。
P2组态通常被认为是具有成本效益的设计,因为它仅使用一个电动机/发电机,在传统的动力传动系的配置基础上需要相对较少的设计变更。
但是,在发动机启动时往往遭受驾驶性能的问题,因为单台电机必须同时提供司机要求的扭矩以及启动发动机时没有明显的噪音,振动和平顺性(NVH)断开离合器接合。
为减轻此问题的一个简单的方法是,使用更高功率的电动机和电池,这导致系统成本增加。
在这项研究中,我们的目标是找到最佳的离合器和电机控制策略,解决驾驶性能的关注,在发动机开始时使用有限的电机和电池电量。
在文献中,也有一些混合动力电动汽车的发动机启动研究。
一个快速的燃料经济性改善的经济性技术之一是怠速停止或轻度混合动力系统如束带的起动器/发电机(BSA)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目16KW-6极变频调速同步电动机的电磁方案及控制系统的设计16KW-6极变频调速同步电动机的电磁方案及控制系统的设计摘要本文讨论的是同步电动机的电磁设计方案及其变频调速的控制回路的设计。
根据课题的要求,本论文主要介绍了同步发电机的基本特点、工作原理、运行方式,及其电磁设计的基本方法。
根据变频调速的要求,本文也对电机的定转子结构、气隙磁场的分布、各电机参数的合理选择等多方面的情况进行了研究,从而确定有效地控制回路方案。
本文在电机设计过程中采用的步骤是:①在国家有关技术标准的基础上,根据用户的需求,大致确定电机的尺寸结构。
②进行电机空载磁场的研究,确定包括磁体的尺寸、每槽导体数等关键参数在内的定转子结构。
③根据电机工作性能的计算公式计算电机性能,由计算结果调整电机的结构,得出三套可行的方案。
第一套方案是选定各项数据按照计算程序来初步设计一台电机,使其符合同步发电机的效率、温升等要求;第二套方案是研究通过增加每槽导体数来使材料最省(主要是指铜和铁的耗用量)的方案;第三套方案是主要是研究减小每槽导体数来使效率达到最高的方案。
④通过比较三种设计方案,兼顾效率、温升、节省材料等多方面的要求,得到一个既省材又提高性能的综合方案。
⑤运用AUTOCAD绘图软件,绘制定转子冲片和绕组连接图。
最后,选择合适的变频调速控制回路,校验变频器的特性,使其符合同步电机的工作特性。
关键词:同步电动机、变频调速、设计The scheme of electromagnetic design for 16KW-6 pole synchronous motor and the design of the control system of the frequency converterAbstractAccording to the requirements of the topic,this paper mainly introduces the fundamental characteristic,working mechanism,working method,the basic method of electromagnetic design of a synchronous motor.According to the requirements of frequency control This article is also on the motor stator and rotor structure, air gap magnetic field distribution, the motor parameter selection, and many other studies carried out to determine the effective control loop program.In this paper, the process of design is:1.On the basis of the national technical standards, according to the needs of users , we can determine the size of the motor structure.2. To research the no-load airgap flux distribution,so as to select the rotor configuration ,which consists of some important parameters,such as the permanent magnet dimension and conductor number per slot3.To get the performance of motor by calculation with known formulas,as a result an adjustment for the motor’s configuration can be practised, we can get three logical and feasible project. The first set of the data the program is selected, according to preliminary calculation program to design a motor to make it consistent with the efficiency of synchronous generator, temperature and other requirements. Second program is the study by increasing the number of conductors per slot to make the material most provinces (mainly refers to the consumption of copper and iron) program. The third set of program is to study reducing the number of conductors per slot to enable the highest efficiency program.4. By comparing the three types of design, balance between efficiency, temperature rise, saving materials, and many other requirements, have a material and also enhance the performance of both the province's comprehensive plan.5. Using AUTOCAD drawing software, drawing tablet and stator and rotor winding connection diagram.Finally, select the appropriate frequency conversion control circuit, checking theinverter characteristics,to meet the synchronous motor operating characteristics. Keywords: synchronous motor;frequency control;design目录摘要 (I)Abstract (II)目录 (IV)第一章绪论 (1)1.1概述 (1)1.2 同步电动机的发展现状 (1)1.3电动机调速系统简介 (2)第二章同步电动机的概述 (3)2.1同步电动机用途和主要类型 (3)2.1.1同步电动机的用途 (3)2.1.2同步电动机的主要类型 (3)2.2同步电动机的基本特点及优点 (4)2.2.1同步电动机的基本特点 (4)2.2.2同步电动机与异步电动机的比较 (4)2.3 同步电动机的主要构件 (5)2.3.1定子结构 (6)2.3.2转子结构 (6)2.4同步电动机的励磁系统 (6)2.4.1同步电动机对励磁装置的要求 (7)2.4.2同步电动机励磁装置的发展和现状 (7)2.4.3同步电动机励磁系统工作原理 (8)第三章同步电动机的工作特性 (9)3.1同步电动机的工作原理 (9)3.2 同步电动机的电磁关系 (10)3.2.1同步电机的磁动势及磁通 (10)3.2.2 同步电机的双反应理论 (12)3.2.3 同步电机的电压平衡方程式及相量图 (14)3.3同步电动机的功率关系与矩角特性 (18)3.3.1同步电动机的功率方程及转矩方程 (18)3.3.2同步电动机的功角特性 (20)3.3.3同步电动机的矩角特性 (21)3.3.4 同步电动机的运行 (22)3.4同步电动机的功率因数调节和V形曲线 (25)3.4.1同步电机的功率因数调节 (25)3.4.2同步电机的V形曲线 (27)3.5同步电动机的起动 (28)3.5.1 同步电动机为什么不能直接起动? (28)3.5.2同步电动机的起动方式 (29)第四章同步电动机设计的理论分析 (32)4.1 电机设计的任务与过程 (32)4.1.1电机设计的任务 (32)4.1.2电机设计的过程 (32)4.2 同步电动机的电磁设计 (33)4.2.1 同步电动机主要尺寸确定 (33)4.2.2同步电动机电枢绕组的设计 (36)4.2.3电机的效率计算 (39)4.2.4 电机的损耗及温升计算 (40)4.3同步电动机设计中影响电机性能的因素 (41)4.3.1气隙对电机性能的影响 (41)4.3.2槽满率对电机性能的影响 (42)4.3.3集肤效应对电机参数的影响 (42)4.3.4饱和对电机参数的影响 (43)4.4同步电动机的结构设计 (44)4.5同步电动机的设计特点 (45)第五章电磁设计方案计算 (46)5.1额定数据和技术要求 (46)5.2计算前的设计思路: (47)5.3方案的主要调整方法 (48)5.4同步电动机电磁设计方案 (48)第六章电磁方案结果分析 (65)6.1计算数据对比 (65)6.1.1定子绕组与铁芯长度的对比 (65)6.1.2方案材料用量计算结果的对比 (65)6.1.3 电机损耗与效率计算结果的对比 (65)6.1.4 三个方案电磁负荷的对比 (66)6.1.5 三个方案电机参数的对比 (66)6.2结果分析 (67)第七章变频调速控制回路的设计 (68)7.1电机变频调速技术发展现状 (68)7.2同步电动机调速系统发展综述 (69)7.2.1同步电动机调速系统的发展 (69)7.2.2调速用同步电动机的几种分类 (71)7.3同步电动机调速系统的分类及其特点 (71)7.4 同步电动机的矢量变换控制 (72)7.5 同步电动机的转矩控制................................................................ 错误!未定义书签。
第八章Autocad 绘图. (77)8.1 AutoCAD 2006绘图软件的使用方法和常用命令 (77)8.2定子冲片图,转子冲片图和绕组连接图的绘制 (78)8.1.1 定、转子冲片图的绘制 (78)8.2.2 绕组连接图的绘制 (79)第九章总结 (81)参考文献(References) (82)致谢 (83)附录 (84)外文资料原文 (85)外文资料译文 (95)第一章绪论在直流电机、交流异步电机、交流同步电机三大电机形式中,同步电动机因其优良的性能和多样的结构而在工农业生产、日常生活中、航空航天和国防等各个领域中得到广泛的应用。