机器人灵巧手指的结构设计与分析
浅析多指仿生灵巧手结构设计

DOI:10.19392/ki.1671-7341.201814001浅析多指仿生灵巧手结构设计陈玉瑜㊀权㊀洁常州纺织服装职业技术学院㊀江苏常州㊀213164摘㊀要:多指仿生灵巧手可以在人手无法操作的环境中灵活㊁准确㊁精细的完成一系列动作㊂本文分析了多指仿生灵巧手在设计过程中的关键技术和手指机构的传动方案,概述了灵巧手的应用和发展趋势㊂关键词:灵巧手;结构设计;关键技术中图分类号:TP241㊀文献标识码:A㊀㊀多指仿生灵巧手是一种集机构㊁驱动㊁传感和控制为一体的机器人系统,具有通用性强㊁感知能力丰富㊁操作灵活等优点,可在日常或极限环境下代替人手执行多种操作㊂1应用多指灵巧手采取仿生学原理,由多个拥有2~3个回转关节的手指组成,每一个关节的自由度都是独立控制的㊂因此,它可以模仿人手完成设备操作㊁维修㊁装配等各种复杂的动作㊂它可以在深海㊁太空航天器的舱外㊁自动化生产线㊁核电站㊁化工厂等危险㊁恶劣的工作环境下从事探测㊁取样㊁装配㊁修理等作业;此外,在工业生产中,大量的重复动作可以让灵巧手准确的复现,大大提高工作效率,减少人力成本㊂2设计的关键技术通过研究人手结构,分析国内外多指仿生灵巧手的研究成果,灵巧手的设计从宏观来看,应该在以下几个方面研究㊂2.1手指的设计分析人手结构发现,人类的五个手指除了拇指,其余四指结构大致相同,所以可以进行模块化设计,即重点设计其中某一手指,别的手指可以在其基础上做尺寸上的调整㊂拇指最灵活,人手的大部分动作都是依靠拇指与其他手指的配合来完成的,所以拇指的设计也较其他手指复杂㊂2.2传感器设计触觉是人手与外界接触的主要途径,而触觉传感器是仿生灵巧手感知外界的重要介质,所以触觉传感器的设计至关重要,它的优劣在很大程度上影响和决定着灵巧手的功能实现㊂2.3控制系统研究为了使多指仿生灵巧手的尺寸和重量达到人手水平,在设计控制系统时,要通过优化算法㊁合理建模等方法尽量压缩结构尺寸,将控制系统嵌入手的内部㊂3设计的基本原则设计多指仿生灵巧手需要根据用途确定其功能要求和设计指标,用途不同带来的设计结果存在很大的差异㊂在设计的时候可根据不同的工作环境和工作要求,制定不同的设计方案,在满足实际功能指标的基础上,尽量追求结构的灵巧性㊁美观性㊁紧凑型和通用实用性㊂4手指机构的传动方案设计4.1关节运动的驱动方式多指仿生灵巧手根据其关节运动驱动机构来分,一般有两种:(1)旋转驱动方式㊂旋转驱动方式的动力来源一般是各种型号的电机和舵机,使用这种驱动方式的灵巧手机械结构简单,动作十分灵敏,控制较为方便㊂但是驱动设备一般体积较大,而且受驱动设备性能参数的影响,一般抓取力量较小,在工程应用中较少㊂(2)直线驱动方式㊂直线驱动方式的动力来源较广泛,目前应用较多的有液压系统㊁气压系统㊁直线电机等等㊂动力来源不同,机械手尺寸与力学性能也有较大差别㊂液压驱动机械手一般抓取力较强,是目前力学性能最好的机械手,但是采用液压驱动的机械手一般重量与体积都比较大,而且液压控制系统的反应速度较低,所以其机械手的灵敏性和灵巧程度受到了很大的影响㊂而气动机械手较液压驱动机械手,其力学性能上有一定的差距,但是气动系统通常体积较小,安装方便,同时又能够保证整个机械手具有足够的灵巧程度与灵敏性,所以,对于小型仿人手机械手,这种驱动方式更能够发挥其作用㊂4.2关节运动的传动方式为保证传动结构紧凑并实现所需求的手指运动功能,常用的传动方式有如下三种㊂(1)绳轮传动㊂绳轮传动机械结构简单,能实现多个自由度,能传递远距离的两关节之间的运动和动力,也能较好的满足灵巧手机械结构上的要求,并且加工方便㊁传动平稳㊁无噪声㊁无振动和冲击㊁耐用性强㊂但是这种传动方式不能提供较大的抓取力度;绳索容易变形,使用时间长了,绳索会变松弛,将会带来较大的运动传递误差;并且绳索只能受拉,不能受压,实现回程将会很困难;所以在应用上受到了一定的限制㊂(2)链条㊁钢带传动㊂链条㊁钢带传动也是远程驱动的手段之一,与绳轮传动相比,刚性高,可以传递较大的输出,但设计上的限制也很大㊂(3)闭式链连杆传动结构㊂仿生灵巧手指各关节之间的距离不是很远,所以也可以运用连杆机构传递运动和动力㊂手指机构采用开环的串联三连杆机构,再添加一些自由度为零的杆组,就可以构造出闭环连杆机构,通过这一闭环连杆机构可以把手指根部的运动和动力传递到各个关节㊂这种传动方式提升了灵巧手的机械性能,但是增加了灵巧手的复杂程度㊂5发展趋势随着仿人机器人的发展,研发多指仿生灵巧手具有重要的理论和实践意义㊂机器人学的发展方向始终是高度仿人形,机械手发展的最高目标是高度仿人手㊂(1)要使灵巧手高度仿人手,两者具有1:1的对应关系㊂首先要在外形尺寸㊁结构,手指数量㊁感觉,抓取功能等方面达到人手的程度㊂这样它就能真正成为人手的延伸或替代,方便而准确地抓取物体㊂同时,灵巧手结构和重量的日益亲民化,控制的日益智能化也为灵巧手成为残疾人假手提供条件㊂(2)考虑到双手协作不仅能简化某些操作,还可能扩大手的作用,双手的协作必将成为发展趋势㊂但是要实现双手协作问题,双手必须能够实现即时通信,所以就需要研究设计一套完美的通信系统㊂(3)多指仿生灵巧手将被广泛地运用到工业实际中,面向产业化应用,灵巧手技术将得到进一步深入发展㊂参考文献:[1]张玉茹,李继婷,李剑锋.机器人灵巧手 建模㊁规划与仿真[M].机械工业出版社,2007.4.[2]张涛.机器人引论[M].机械工业出版社,2016.11.基金项目:常州纺织服装职业技术学院学术科研基金项目(CFK201508)作者简介:陈玉瑜(1979-),女,甘肃靖远人,硕士,讲师,常州纺织服装职业技术学院机电工程系,主要从事机械设计和数控技术的教学科研工作;权洁(1987-),男,江苏徐州人,硕士,助教,常州纺织服装职业技术学院机电工程系,主要从事机械设计和机械制造的教学科研工作㊂1㊀科技风2018年5月科技创新. All Rights Reserved.。
机械灵巧手的设计与控制研究

机械灵巧手的设计与控制研究近年来,机器人技术的快速发展使得机械灵巧手的设计与控制研究备受关注。
机械灵巧手是一种模拟人手的机械装置,具备复杂的运动能力和灵活的手抓能力。
本文将从设计和控制两方面探讨机械灵巧手的研究。
一、设计:仿生学的应用在机械灵巧手的设计中,仿生学是一种常见的方法。
仿生学是一门研究生物体结构、功能和行为的学科,将自然界的智慧运用到机器人系统的设计中。
通过对人手结构和运动机理的研究,可以有效地提高机械灵巧手的操作能力。
首先,机械灵巧手的设计需要兼顾结构的轻巧和刚性。
轻巧的结构可以降低机器人自身的负载,提高操作的灵活性;而刚性的结构则可以保证机械灵巧手在运动过程中的稳定性。
为此,研究人员常借鉴人手的骨骼结构,结合轻型材料和刚性材料,设计出既轻巧又刚性的机械结构。
其次,机械灵巧手的设计需要考虑手指的灵活性和精确度。
人手的灵巧性来自于手指关节的灵活度和力学特性的精确控制。
因此,在机械灵巧手的设计中,必须兼顾机械结构的自由度和关节的力学特性。
通过采用柔性材料和可控机构,可以实现机械灵巧手手指的高灵活度和精确控制。
最后,机械灵巧手的设计需要考虑手抓的力度和稳定性。
人手的抓握能力取决于手指间的协调运动和力量调节。
因此,在机械灵巧手的设计中,研究人员通常采用传感器和反馈控制系统,对手抓的力度和力量进行精确控制,以实现稳定的抓取功能。
二、控制:智能控制的应用机械灵巧手的控制是实现其复杂运动和灵活抓握的关键。
传统的控制方法往往只能实现机械灵巧手的简单运动,难以满足复杂任务的需求。
因此,研究人员借鉴人类的智能控制方法,开展智能控制的研究,以提高机械灵巧手的操作能力。
首先,机械灵巧手的控制需要具备感知和决策的能力。
感知是机械灵巧手获取外部信息的能力,决策则是机械灵巧手根据感知信息进行决策的能力。
为了实现这一目标,研究人员采用传感器和图像处理技术,使机械灵巧手能够感知和理解周围环境的特征,进而做出适应性的决策。
(完整版)仿人灵巧手的结构设计毕业设计

仿人灵巧手的结构设计摘要本文介绍了一种五指型仿人灵巧手的的机构设计与实现方法,根据对非规则物品拿取任务的要求,采用转动机构和连杆机构相结合,设计了五指型机器手。
手指弯曲电机与指间平衡电机耦合驱动,实现了机器手的多角度张开、抓握运动方式。
详细分析了机器手手指机构、手掌机构、手指间辅助平衡机构的工作原理,给出了设计方案,并根据总体设计要求选定了关键参数。
通过虚拟样机技术验证了所设计的手指机构传动系统的正确性和自适应抓持的可行性从而为整个仿人手的设计奠定了基础。
关键词:五指型机器手工作原理机构设计虚拟样机The structure designing of and realization of a five-finger arm—and—the demand of fuIfilling the task of of this arm.and—a couple,thus realizing the multi—angle opening and grabbing motion.This thesis gives a detailed analysis on the mechanism of the finger system,the palm system and the aiding finger—balancing system.A design project is also provided,with key parameters according to the general demand.Through virtual prototyping Technology designed to verify the accuracy of finger mechanism and adaptive transmission feasibility of grasping so as to lay the entire design of a —and—;basic theory;mechanism目录1.引言 (1)1.1 研究的背景及其意义 (2)1.2 国内外研究状况 (3)1.3 关键技术 (5)1.3.1 小而强的驱动 (5)1.3.2 丰富的感觉 (6)1.3.3 聪明的大脑 (7)2.仿人灵巧手手指机构的传动方案设计 (8)2.1手指关节的传动方案设计 (8)2.2 仿人灵巧手的整体结构设计 (10)3.手指与手掌结构的设计与制作 (10)3.1 手指关节的设计与制作 (11)3.2 手指关节间连接机构的设计 (13)3.3 手掌的结构设计与制作 (14)3.4 手指基关节的机构设计与制作 (15)4.仿人灵巧手运动学模型 (16)4.1 灵巧手坐标系的建立 (16)4.2 灵巧手正运动学解 (17)4.3 仿人灵巧手动力学模型 (20)5.手指的虚拟样机建立与运动抓持仿真 (21)6.驱动系统的设计 (26)6.1电机的选用 (26)6.2控制系统的选择 (26)1.引言自从40多年前,第一台计算机控制的机械臂出现之日起,人类将机器人概念延伸到了一个新的领域:机器人。
三指灵巧手结构设计与控制实验_(1)
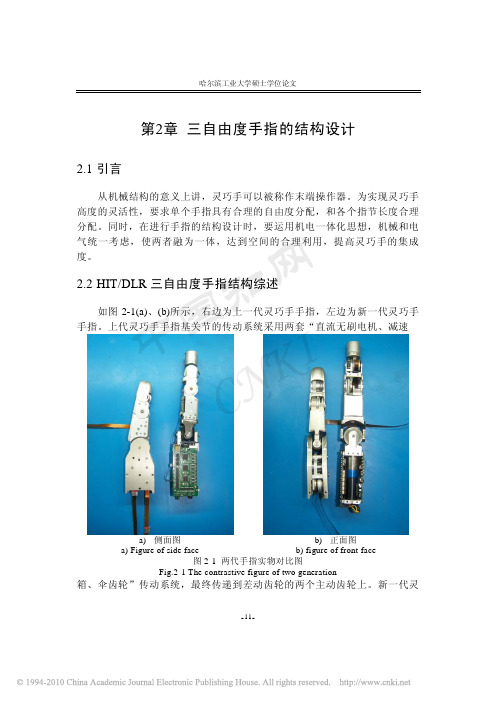
a) 前一代灵巧手指模型尺寸图
b) 本设计灵巧手指模型尺寸图
a) Figure of previous finger model
b) Figure of new finger model
图 2-2 两代灵巧手指模型尺寸对比图
Fig.2-2 The contrastive figure of two generate finger model
扭矩时所受的轴向力、径向力和圆周力,圆周力是驱动基关节转动的动力;
新一代手指三个指节的长度配置是仿照人手指的长度比例 2:1:1,手指总 长度为 106mm,由于指节 1 内要安放指关节 2、3 的驱动器,使指节 1 的长 度较长,手指的主要尺寸参数和上一代手指的对比更接近人手,具体参数见 表 2-1。在结构设计上由于基关节采用新的传动方式,这使基关节的尺寸大 大减小,从而使整个手指的宽度和长度都大大减小,对于灵巧手的包装、结 构设计都提供和很大的方便。
⎡1
⎡θ 1 ⎢⎣θ 2
⎤ ⎥ ⎦
=
⎢⎢⎢−21
⎣2
1⎤
2 1
⎥ ⎥ ⎥
•
⎡θ ⎢⎣θ
1a 2a
⎤ ⎥ ⎦
2⎦
(2-1)
基关节的逆运动学变换方程如式(2-2)
⎡θ1a ⎢⎣θ 2a
⎤ ⎥ ⎦
=
⎡2 ⎢⎣2
− 2⎤
2
⎥ ⎦
•
⎡θ1 ⎢⎣θ 2
⎤ ⎥ ⎦
(2-2)
2.3.2 手指基关节驱动和传动系统
在机器人灵巧手的设计中,驱动的形式主要有电磁(电机)驱动、液气压 驱动和采用记忆合金等。液气压驱动方式的缺点是设备复杂、庞大,难以实 现灵巧手的高度集成化。记忆合金驱动方式存在着疲劳和寿命等问题。现在 在灵巧手的研究中,电机驱动是主要的驱动方式。体积小、输出力大的电机 及集成驱动芯片的采用使电机、驱动电路板与手指机械本体融为一体,实现 灵巧手手指的模块化。本设计中,基关节采用 Maxon 公司提供的两个 EC20
模块化磁吸五指灵巧手结构设计与控制研究

模块化磁吸五指灵巧手结构设计与控制研究司成俊(长治职业技术学院机电系,山西长治046000)摘要针对目前五指灵巧手自由度低、拆装繁琐等问题,设计出一种模块化、易拆装、直驱式11自由度五指灵巧手。
通过永磁铁实现手指关节间的快速拆装,每个手指关节至少有±90°转动范围;通过对大拇指转动角度的特殊设计,可实现灵巧手左/右手模式直接切换以及双侧同时抓取。
通过3D打印制作了五指灵巧手样机。
针对灵巧手多传感器造成控制系统复杂的问题,提出采用电流反馈控制算法,通过对电机驱动电流进行信号采集和后处理,建立了电流-转角-指尖力之间的数学模型,并进行了抓取实验。
结果表明,设计的模块化灵巧手具有较强的抓取能力,并且通过电流反馈控制算法,可以实现对灵巧手运动状态和抓取力的控制,完成对目标物抓取操作。
关键词模块化磁吸关节电流反馈算法双侧抓取Study on the Structural Design and Control of Modular MagneticSuction Five-finger Dexterous HandSi Chengjun(Electromechanical Department,Changzhi Vocational and Technical College,Changzhi046000,China)Abstract In order to solve the problems of low freedom of five fingers dexterous hand and complicated disassembly and installation,a modular,easy disassembly and installation,direct drive11degrees of freedom five fingers dexterous hand is designed.Each finger joint has a rotation range of at least±90°.Through the spe‐cial design of the rotation angle of the thumb,the left/right hand mode of the dexterous hand can be directly switched and both sides can be grasped at the same time.A five-finger dexterous hand prototype is made through3D printing.Aiming at the complex control system caused by multiple sensors of the dexterous hand at present,the current feedback control algorithm is proposed,through signal acquisition and post-processing of the motor drive current,the mathematical model of current-rotation angle-fingertip force is established,and the grasping experiment is carried out.The results show that the designed modular dexterous hand has strong grasping ability,and the control algorithm of current feedback can control the movement state and grasping force of the dexterous hand,and complete the target grab operation.Key words Modular Magnetic suction joint Current feedback algorithm Double side grasp0引言灵巧手作为重要的人机交互工具之一,其在工业机器人和服务机器人中占据重要的地位。
TUST灵巧手手指设计

技术创新《微计算机信息》2012年第28卷第10期120元/年邮局订阅号:82-946《现场总线技术应用200例》测控自动化TUST 灵巧手手指设计Finger of TUST dexterous hand(天津科技大学)孙志超毕德学SUN Zhi-chao BI De-xue摘要:基于绳索传动的TUST 灵巧手,成功实现了一个电机对整手21个自由度的高度欠驱动控制,以及对物体的柔性抓取。
本文主要介绍了TUST 灵巧手的手指部分的设计。
提出了一种新型的绳索传动方式,该方式较已往的绳索传动有绳索数量少,不易打滑等特点;通过对该方式的组合设计了TUST 手指。
同时进行了TUST 手指数学模型的研究,给出了合适的控制策略。
成功减少了控制时间,实现了柔性抓取功能。
TUST 手的原理、控制方式较以前的灵巧手都有所不同,为灵巧手的改进探索了新的方向。
关键词:绳索传动;控制策略;柔性抓取中图分类号:TH 文献标识码:AABSTRACT:TUST dexterous hand is based on rope transmission.It controls 21freedoms on whole hand by one motor successfully,which is highly underactuated.This article mainly introduced the fingers design of TUST dexterous hand.And introduces a new way of rope transmission which has less rope numbers and sliding hard.Through the combination of the way of rope transmission the TUST finger was designed.We also researched the mathematical model of TUST fingers ,and get an appropriate control strategy.With that we reduced control time and realize flexible grab function successfully .TUST hand is different from existing dexterous hand in principle,control method;and explored a new direction for dexterous hand design.Key word:rope transmission;control method;flexible function文章编号:1008-0570(2012)10-0126-021前言灵巧手指作为机器人的末端执行机构,对机器人的性能有着极其重要的影响,它能适应不同的抓取和操作任务,因而不必在作业中经常更换执行末端。
可重构机器人手指关节的设计与优化
可重构机器人手指关节的设计与优化近年来,随着机器人技术的不断进步和应用领域的拓展,人们对可重构机器人的需求与日俱增。
可重构机器人具有模块化结构,能够根据任务需求进行灵活组合和调整。
在可重构机器人的构成部件中,手指关节起着至关重要的作用,其设计与优化具有重要的理论和实践意义。
首先,手指关节的设计需要兼顾机械结构和运动控制。
在机械结构方面,传统的手指关节采用单一的驱动方式,如电机驱动或气动驱动。
然而,这种设计存在一些局限性,如电机驱动的手指关节在运动过程中容易出现抖动现象,气动驱动的手指关节受到压力控制的限制。
为了解决这些问题,一种可行的设计方案是采用多关节驱动的机械结构,通过合理配置关节和实现关节之间的协调运动,提高手指关节的稳定性和精确性。
其次,手指关节的优化需要考虑运动学模型和力学性能。
运动学模型是描述手指关节运动规律的数学模型,通过研究手指关节的转动轴、位移和速度等参数,可以实现对手指关节运动的精确控制。
力学性能涉及手指关节的承载能力和抗冲击性能等方面,既要保证手指关节能够承受较大的载荷,又要保证在受到冲击时不易损坏。
为了实现手指关节的优化设计,可以借助仿生学的原理和方法,模拟人体手指的结构和运动特点,从而提高机器人手指关节的性能。
此外,手指关节的设计和优化还需要考虑与人工智能的集成。
当前,人工智能技术在机器人领域得到了广泛应用,能够实现机器人的自主感知、决策和行动能力。
将人工智能技术与机器人手指关节的设计和优化相结合,可以实现更高水平的智能化操作。
例如,通过深度学习算法训练机器人手指关节的运动模式,使其能够自动适应不同的任务需求,并根据实时反馈信息进行调整和改进。
这种智能化设计可以大大提高机器人的生产效率和操作精度。
最后,可重构机器人手指关节的设计与优化还需要考虑工程实施的可行性和经济性。
在实际应用中,手指关节的设计和优化必须考虑到制造成本、维修成本和可持续性等因素。
因此,合理选择材料、采用成熟的制造工艺和优化的控制策略,对于提高手指关节的可靠性和经济性至关重要。
机械灵巧手指设计及运动控制研究

机械灵巧手指设计及运动控制研究随着科技的发展,机械灵巧手指设计及运动控制研究成为了越来越重要的领域。
机械灵巧手指的设计和控制不仅在工业生产中发挥重要作用,还可以应用于康复医学和人机交互等领域。
本文将介绍机械灵巧手指设计及运动控制的研究现状和未来发展。
一、机械灵巧手指的设计机械灵巧手指的设计是一个复杂而多样化的过程。
首先,设计师需要考虑手指的结构和材料选择。
手指的结构通常由关节、骨骼和肌腱组成,关节的设计应能使手指实现多个自由度的运动。
材料的选择应具备一定的刚度和柔韧性,以满足手指在不同工作负载下的运动需求。
其次,机械灵巧手指的传感器设计也是至关重要的。
传感器可以帮助机械手指实现精确的位置和力量控制。
常用的传感器包括力/压力传感器、力矩传感器和位置传感器等。
这些传感器可以将手指的运动信息转化为电信号,以供控制系统进行反馈和调整。
最后,机械灵巧手指的控制系统设计也是关键所在。
控制系统应能准确地感知手指的位置和外部力量,并根据设定的任务要求对手指进行精确的运动控制。
常用的控制方法包括PID控制、模型预测控制和神经网络控制等。
这些方法可以根据手指的运动需求和环境变化来调整手指的控制参数,从而实现更为精确的运动。
二、机械灵巧手指的运动控制研究机械灵巧手指的运动控制涉及到动力学和控制理论的应用。
为了使手指能够按照设计要求进行精确的灵活运动,研究人员需要通过建立准确的力学模型来分析手指的运动特性。
同时,他们还需要设计合适的控制算法来实现对手指的精确控制。
在手指的动力学建模方面,研究人员通常采用刚体动力学或连续介质力学模型。
这些模型可以帮助研究人员深入了解手指的运动特性、关节力矩和外部负载之间的关系,从而为手指的控制提供理论依据。
在控制算法的设计方面,PID控制是最常用的方法之一。
PID控制可以根据手指的运动误差和变化率来调整控制器输出,以实现对手指的精确控制。
此外,模型预测控制和神经网络控制也被广泛应用于机械灵巧手指的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
手指远指关节的位姿坐标为:
--0.5000 --0.8660
O
21.5000
L:五=
0.8660 O
-0.5000
0
73.239l
0
1.0000
0
0
O
O
1.0000
设:‘p=120。.x=21.5。y=73.24,Ll=43ram,Lr=36mm。 在MATLAB中代入上述公式计算,求得: 0t=60.00020。e卢29.995 1 o。03=30.00470。 由此计算结果可验证:在Solidworks建立的坐标系中 测量的各关节角度值与仿真计算结果相符。 根据运动学分析中指尖相对于基座标的坐标变换矩阵 ”,并依据人手各关节弯曲角度设定0z=[一600,900], 02=03-[0。,900],在MATLAB环境中绘制指尖点(并,Y) 的运动空间图如图3所示。 由图3可以看出.指尖的运动空间范围在300mmx 300ram的空间内。
GO Z30.0; Go X0 YO:
(D02为精加工刀具补偿。R数
M30; 子程序
0100: G9l G01 Z-2.0: G90 G4l G01 X一30.O Y一30.0 F80: G01 Y30.0:
GOl X30.0: Gol Y一30.0: G0l X一30.0:
G40 Gol X-60.0 Y一60.0:
业出版社.2001. 【2]赵正文.数控铣床/加工中心加工工艺与编程[M].北京:
中国劳动和社会保障出版社.2006.
作者简介:吴霞,女,1976年生,广东潮安人.大学本科。一
级实习指导教师。研究领域:数控专业理论与实操教学方法。已
发表论文2篇。
(编辑:向 飞)
万方数据
机器人灵巧手指的结构设计与分析
机械工业出版社.2005. [2]John J.Cmig(美),寅超等译.机器人学导论[M】.北京:
机械工业出版社.2006.
[3]白井良明(日).机器人工程【M].北京:科学出版社,
2001.
[4]舒畅,熊蓉,傅周东.基于模块化设计方法的服务机器人结 构设计[J].机电工程,2010(02):1-4.
j/nm
图3 灵巧手指指尖运动轨迹图
万方数据
_墨署譬翟翟冒E团曩置目巨重量盈
!壅皇差≥
5结论
本文主要介绍了机器人灵巧手指的结构设计。并在 Solidworks中实现了虚拟装配和碰撞检测。通过对建立的 灵巧手指进行正运动及逆运动学分析.在MATLAB中绘制 出指尖的运动空间图.并代人实际设计尺寸进行了验证. 结果表明该灵巧手指结构设计符合仿生的要求,可达到规 划的宅间位置。 参考文献: [1】江洪,魏峥.solidworks 2004/2005基础教程[M].北京:
收稿日期:2010-06-26
万方数据
(:妄兰皇茎垄墨l量譬翟墨目I互囫宙巨国曩詈圈
衰l 远指尖点坐标值
各个指节相对于基座标的坐标变换矩阵分别为:
彳= q墨O O
qO O q OO
OlO
O Ol
q2一丑2 0厶q 霹= q2 Ct2 0厶丑
0 O1O 0 OO 1
C123一而23
S123 q23
O
1.郭卫东;满洁;张玉茹 灵巧手的单指动力学方程建立与验证[期刊论文]-机械设计 2002(04)
2.江洪.魏峥 SolidWorks 2004/2005基础教程 2005
3.魏引焕;杨洋 单指机械手考虑滑动运动的力学条件及逆运动学的求解和验证[期刊论文]-陕西科技大学学报
2003(06) 4.John J.Craig.贠超 机器人学导论 2006
作者: 作者单位: 刊名:
英文刊名: 年,卷(期):
王凯, 郭冰菁, WANG Kai, GUO Bing-jing 河南科技大学,河南,洛阳471003
机电工程技术 MECHANICAL & ELECTRICAL ENGINEERING TECHNOLOGY 2010,39(12)
参考文献(12条)
3)在两个运动指令之间有一个运动为O的运动指令 时,由于运动为0的程序段没有零件轮廓信息,此时刀补 会产生过切现象。
4)在两个运动指令之间如果有一条辅助功能指令和 一条位移为O的运动指令。也会产生过切现象。
5)在刀具补偿模式下,不允许在连续两段以上的非 补偿平面内移动指令,否则刀具易出现过切等危险动作。
(4)使用刀具半径补偿时还应避免由于编程不当而引
起的工件过切现象。 1)使用刀具半径补偿和去除刀具半径补偿时,刀具
必须在所补偿的平面内移动,且起始位置与终点位置最好 与补偿方向在同一侧.移动距离大于刀具半径补偿值。
2)两个运动指令之间若出现二个辅助功能程序段. 在刀补计算时将无法获得二个相邻轮廓段的信息。有可能 造成过切现象。
生。研究领域:机电一体化。
(编辑:王智圣)
·—●一一‘—.-一-‘。+---4"-一—●一-'-4"--—_一一+*—+一—+-——+-一-+-··卜-+一+-+-+一+一+-+一+-+-+-+-+-+。+--4----4--+-'4-'-+·
(上接第53页)
D02 M98 P100 L1; 值由测量计算得出)
6)G4l(或c42)与C,40之间的程序段不得出现任何 转移加工,如镜像、子程序加T等。
(5)D00一D99为刀具半径补偿号,D00意味着取消刀 具补偿。刀具补偿值在加工或运行之前必须设定在补偿存 储器中。
5结束语
作为一名优秀的数控编程操作人员。应全面理解刀具 半径补偿的作用及意义.合理、灵活地应用刀具半径补偿 功能,并与刀补原理相结合,以简化编程为原则正确编制 加工程序.保证数控铣削加工的有效性和准确性,提高生 产效率。 参考文献: [1]刘雄伟.数控机床操作与编程培训教程[M].北京:机械工
5.舒畅;熊蓉;傅周东 基于模块化设计方法的服务机器人结构设计[期刊论文]-机电工程 2010(02)
6.白井良明 机器人工程 2001 7.白井良明 机器人工程 2001 8.舒畅.熊蓉.傅周东 基于模块化设计方法的服务机器人结构设计 2010(2) 9.John J.Craig;贠超 机器人学导论 2006 10.魏引焕.杨洋.尚久浩 单指机械手考虑滑动运动的力学条件及逆运动学的求解和验证 2003(6) 11.江洪;魏峥 SolidWorks 2004/2005基础教程 2005 12.郭卫东.满洁.张玉茹 灵巧手的单指动力学方程建立与验证 2002(4)
(3)
y 2 L—l+L2s12
(4)
学 由上式(3) (4)可求出: =
吃
屯:±√焉。
应用2幅角反正切公式计算:02=arctan2(s2,C2)o 同样运用代数法求出:Ol=arctan2(y,菇)-arctan2。 (k2,&I)。 上式中:kj=LI+L2c2;
||}2=L2s20
又由(1)(2)求出0l、02、03的和: 0l+02+03=arctan2(s∞,C中)=‘P。 由于0。,0:已知,从而可以解出钆。
[5]魏引焕,扬洋.单指机械手考虑滑动运动的力学条件及逆运 动学的求解和验证【J].陕西科技大学擘报,2003,21 (6):66—68.
[6]郭卫东,满洁。张玉茹.灵巧手的单指动力学方程建立与验 证[J].机械设计,2002(4):13一14.
第一作者简介:王凯,男。1982年生,河南洛阳人,硕叶=研究
O
O
O
厶cl+厶c12 厶^+厶A2
0 l
C123
"= S123 O O
-S123 q23
O 0
厶q+厶c12+厶c123 上IsI+上2^2+厶墨2j
O l
式中:c代表COS,s代表sjn。 设定0l=60。,02=30。,03=30。,则在MATLAB中计算 得:
--0.5000 -0.8660
3运动学分析
为了验证手指运动是否能达到预定的位置及确定出手 指的运动空间范围,对手指进行运动学分析,如图2所示 建立手指各坐标系。
五 图2 机器人灵巧手指运动简图
图1 机器人手指i维视图
3.1正运动分析 用D—H参数法12-3]求出远指尖点处的坐标值.如表
1所示。
[二]蔓工] t河南省教育厅自然科学研究计划项目 (编号:20108460006)
尼韦尔的FSSl5009的触力传感器,因此用相应的实心铝 合金制作,在指尖的凸起处铣出相应小槽,为安装触力传 感器预留空间。在各个指关节处安装用于测量角度的 R24HS电位计,并把之与关节滑轮结合在一起。其中滑轮 开有Imm的槽,用于限制人工肌肉的钢丝.为了防止各 个关节间的钢丝传动互相千扰,把各传动滑轮直径分别设 计为qb22mm、币22mm、qb20mm.具体的传动是由人工肌 肉分别拉动中指节及根指节形成向内的弯曲。
本文链接:/Periodical_jxkf201012028.aspx
M99:
在主程序中用M0使程序暂停,此时测量下件尺寸. 计算出其与零件图尺寸的差值.并将差值作为精加工刀具 半径补偿值输入D02,这样加工出的工件可满足实际要 求,确保工件加工精度。
4使用刀具半径补偿时应注意的问题
前面阐述在数控铣削中灵活应用刀具半径补偿功能、 合理设置刀具半径补偿值在数控铣削加工中的重要意义。 然而在实际应用时须注意以下几个问题.以确保刀具半径 补偿能顺利执行及安全加工。
机器人灵巧手指的结构设计与分析木
王凯.郭冰菁
(河南科技大学, 河南洛阳471003)
【—赢颤孵聊””
隰.
”强矿
器 摘要:通过对人下指结构的分析.基于Solidworks i维软件设计了一种气动人工肌肉驱动的机器人灵巧手指,按照人手指结构比例
》 进行了优化.并采用触力传感器和电位计来分别检测指尖接触力及=三个关爷转角.为构成闭环控制产生反馈信号。对所设计的手