并联机器人设计论文设计
并联机器人智能控制系统设计与研究

并联机器人智能控制系统设计与研究随着机器人技术的不断发展,机器人在工业、医疗、军事等领域的应用越来越广泛。
而并联机器人作为一种特殊类型的机器人,具有高精度、高刚性和高自由度的特点,被广泛应用于装配、焊接、演示等多个领域。
本文将深入探讨并联机器人智能控制系统的设计与研究,以满足并联机器人在不同应用领域的需求。
1. 智能控制系统概述智能控制系统是指利用先进的算法和技术实现机器人自主感知、决策和执行任务的能力。
对于并联机器人而言,智能控制系统的设计需考虑到高精度控制、动力学建模、运动规划和碰撞检测等方面。
2. 高精度控制高精度控制是并联机器人应用的关键要素之一。
通过采用高分辨率的传感器和先进的控制算法,可以实现机器人对于位置、速度和力的精确控制。
此外,还需要考虑机器人本体和传感器的刚性,以减小误差对控制精度的影响。
3. 动力学建模在并联机器人的智能控制系统中,准确的动力学建模是实现高效力控制和优化轨迹规划的基础。
通过建立机器人的运动学和动力学模型,可以预测机器人的响应和行为,并根据实时输入的传感器数据进行调整。
传统的建模方法包括牛顿-欧拉方法和拉格朗日-迭代方法,而基于机器学习的建模方法也在逐渐得到应用。
4. 运动规划运动规划是并联机器人智能控制系统的一个重要组成部分。
通过考虑机器人的自由度、约束条件和目标任务,可以确定机器人的最佳运动路径和对应的关节角度。
此外,还需要考虑碰撞检测和避障算法,以确保机器人的安全运行。
5. 碰撞检测与防护在高精度任务中,碰撞检测和防护技术对于并联机器人的安全运行至关重要。
通过使用传感器和机器视觉技术,可以检测机器人与周围环境或其他物体的碰撞风险,并及时采取相应的措施,如停止运动或改变轨迹。
此外,还可以通过安全软件和硬件设备来防护机器人系统的运行,保护操作人员和设备的安全。
综上所述,针对并联机器人智能控制系统的设计与研究,需要考虑高精度控制、动力学建模、运动规划和碰撞检测与防护等方面。
并联机械手机电系统设计
重庆理工大学毕业设计(论文)并联机械手机电系统设计所在学院专业班级姓名学号指导老师年月日摘要并联机构具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点可以作为航天上的对接器、航海上的潜艇救援对接器;工业上可以作为大件的装配机器人、精密操作的微动器;可以在汽车总装线上自动安装车轮部件;另外,医用机器人,天文望远镜等都利用了并联技术。
本文并联机构的研究方向:(1)并联机构组成原理的研究研究并联机构自由度计算、运动副类型、支铰类型以及运动学分析、建模与仿真等问题。
(2)并联机构运动空间的研究(3)并联机构结构设计的研究并联机构的结构设计包括很多内容,如机构的总体布局、安全机构设计。
由于本人水平有限,文中的错误和不足在所难免,恳请各位老师给予批评和指正。
关键词:,机械手;并联机械手;虚拟样机;并联机构AbstractParallel mechanism with high rigidity, strong bearing capacity, small error, high precision, small self-weight loading ratio, good dynamic performance, easy control and a series of advantages can be used as a submarine rescue docking docking device, maritime space on; the industry can be used as micro - actuator assembly machines, large precision operation; you can automatically install the wheel assembly in automobile assembly line; in addition, medical robotics, astronomical telescope, using parallel technology.The direction of the research of parallel mechanism:(1) study on the principle of parallel mechanism.The degree of freedom parallel mechanism, motion pair of calculation type, hinge type and kinematic analysis, modeling and Simulation of the.(2) for parallel mechanism workspaceIncluding the motion space analysis and simulation, the reachable workspace solution (such as numerical method, sphere coordinate searching method etc.), mechanism of interference analysis and location.(3) for parallel mechanism structure designStructure design of parallel mechanism includes many contents, such as the design of general layout, organization security mechanism.Because of my limited ability, mistakes and shortcomings in this paper can hardly be avoided, ask teachers to give the criticism and correction.Keywords three degree of freedom parallel mechanism; virtual prototype;目录摘要 (II)Abstract ...................................................................................................................................... I II 目录 (IV)第1章前言 (1)1.1 课题研究背景意义 (1)1.2 国内外研究现状 (2)第2章并联机械手的结构及工作原理 (5)2.1 并联运动机构概述 (5)2.2并联的结构及机械运动原理 (5)2.3 控制系统结构及工作原理 (6)2.4 并联机构工作空间的分析 (7)第3章并联机构主要部件的设计 (9)3.1 电动机选型 (9)3.1.1电机的分类 (9)3.1.2选择步进电机的计算 (9)3.2手爪夹持器结构设计与校核 (19)3.2.1手爪夹持器种类 (19)3.2.2夹持器设计计算 (20)3.2.3夹持器校核 (21)第4章并联机构机并联机构空间分析 (23)4.1并联机构并联机构机的运动学约束 (23)4.1.1 连杆杆长约束 (23)4.1.2 运动副转角约束 (23)4.1.3 连杆杆间干涉 (24)4.2 确定并联机构空间的基本方法 (24)4.3 PLC控制部分设计 (24)4.3.1 可编程序控制器的选择及工作过程 (25)4.3.2 可编程序控制器的使用步骤 (26)4.3.3可编程序控制器控制方案 (27)4.3.4 PLC控制原理图设计 (27)4.3.5 PLC梯形图概述 (28)总结 (29)参考文献 (30)致谢 (31)第1章前言1.1 课题研究背景意义并联机器人与已经用的很好、很广泛的串联机器人相比往往使人感到它并不适合用作机器人,它没有那么大的活动空间,它活动上平台远远不如串联机器人手部来得灵活。
三自由度并联机械手的设计.doc

学号:密级:武汉东湖学院本科生毕业论文(设计) 三自由度并联机械手的设计院(系)名称:机电工程学院专业名称:机械设计制造及其自动化学生姓名:指导教师:二〇一六年五月六日郑重声明我郑重声明:本人恪守学术道德,崇尚严谨学风,所呈交的学术论文是本人在老师的指导下,独立进行研究工作所取得的结果。
除文中明确注明和引用的内容外,本论文不包含任何他人已经发表和撰写过得内容。
论文为本人亲自撰写,并对所写内容负责。
本人签名:日期:2016年5月7号摘要随着机器人技术的快速发展,并联机械手的应用领域越来越广,已成为当今机器人领域新的研究热点。
针对并联机械手机构比传统串联机械手更复杂的问题,本文以一种轻型高速的三自由度Delta 并联机械手为例,在完成其运动学的基础上,对并联机械手进行了建模以及装配。
首先,本文介绍了三自由度并联机械手机构的工作原理,并对其进行了运动学分析。
其中,对机构的自由度进行的计算,采用几何法求得了其运动学正解以及其运动学逆解。
其次,对机构进行了速度模型及雅克比矩阵的分析。
实现了solidworks对机构的零部件与装配图三维建模。
最后,通过个零部件的配合,实现了三自由度并联机械手的装配。
关键词:并联机械手;三自由度;3D建模ABSTRACTWith the rapid development of robot technology, parallel manipulator used more and more widely, has become the hot spot in the field of new robots today. In view of the parallel manipulator mechanism more complex than the traditional serial manipulator problem, based on a lightweight high-speed three degree of freedom parallel manipulator as an example, the Delta at the completion of its kinematics, on the basis of the parallel manipulator has carried on the modeling and assembly.First, this paper introduces the working principle of three degrees of freedom parallel manipulator mechanism, and carries on the kinematics analysis. Among them, the institution of degree of freedom for the calculation of geometric method is used to obtain the positive kinematics solution and its inverse kinematics solution. Second, the institutions for the velocity model and the Jacobi matrix analysis. Implements the solidworks for spare parts and assembly drawing 3 d modeling of the organization. Finally, by a spare parts, implements the three degree of freedom parallel manipulator assembly.Keywords: Parallel manipulator;Three degrees of freedom;3D modeling目录摘要 (I)ABSTRACT (II)第1章引言 (1)1.1 课题背景 (1)1.2 课题目的及意义 (1)1.3 课题研究内容 (1)第2章并联机械手的概述 (3)2.1 关于并联机械手 (3)2.1.1 并联机械手的定义与特点 (3)2.1.2 并联机械手的研究现状 (4)2.2 并联机械手的工业应用 (5)2.3 本章小结 (6)第3章三自由度并联机械手的运动学分析 (7)3.1 机构简介 (7)3.2 自由度分析 (7)3.3 运动学分析 (8)3.3.1 运动学逆解 (9)3.3.2 运动学正解 (9)3.3.3 速度模型及雅克比矩阵 (12)3.4 本章小结 (13)第4章并联机械手的建模与装配 (14)4.1 三维建模软件solidworks简介 (14)4.2 并联机械手的三维建模 (14)4.3 并联机械手零件实体造型 (14)4.4 并联机械手装配 (16)4.5本章小结 (17)总结.....................................................................................,. (18)参考文献 (19)致谢 (20)附录 (21)第1章引言1.1课题背景翻开整个人类的历史,就会发现这是一部不断认识世界、改造世界的发展历史,一部伴随生产工具不断提高的生产力进步史。
一款并联工业机器人的设计
2020.16科学技术创新一款并联工业机器人的设计陈文华陈炜镔梁志聪(广州城建职业学院,广东广州510925)1研究背景自从1961年推出第一台工业机器人以来,机器人技术发展相当迅速,已经广泛应用于汽车制造、电子产品设计、核工业、服务业和医疗卫生等许多方面。
1985年,Clavel 设计了第一款Delta 并联机器人。
Delta 并联机器人是一种具有3个平动自由度的高速并联机器人,具备结构紧凑稳定,精度高,机器刚性高,承载能力大的特性。
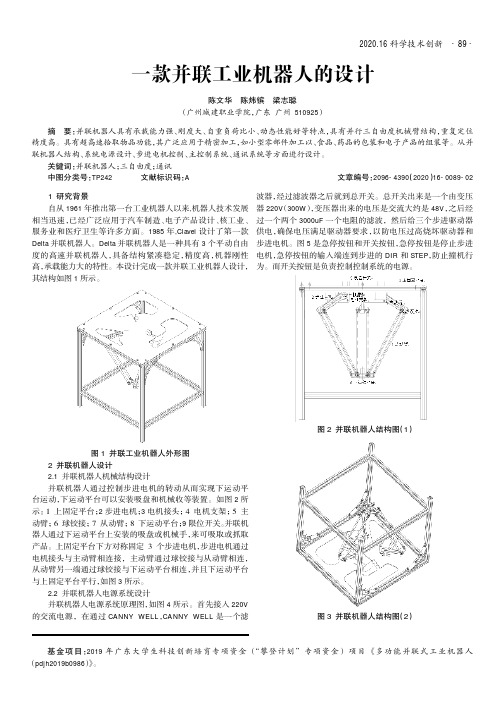
本设计完成一款并联工业机器人设计,其结构如图1所示。
图1并联工业机器人外形图2并联机器人设计2.1并联机器人机械结构设计并联机器人通过控制步进电机的转动从而实现下运动平台运动,下运动平台可以安装吸盘和机械收等装置。
如图2所示:1上固定平台;2步进电机;3电机接头;4电机支架;5主动臂;6球铰接;7从动臂;8下运动平台;9限位开关。
并联机器人通过下运动平台上安装的吸盘或机械手,来可吸取或抓取产品。
上固定平台下方对称固定3个步进电机,步进电机通过电机接头与主动臂相连接,主动臂通过球铰接与从动臂相连,从动臂另一端通过球铰接与下运动平台相连,并且下运动平台与上固定平台平行,如图3所示。
2.2并联机器人电源系统设计并联机器人电源系统原理图,如图4所示。
首先接入220V 的交流电源,在通过CANNY WELL ,CANNY WELL 是一个滤波器,经过滤波器之后就到总开关。
总开关出来是一个由变压器220V (300W ),变压器出来的电压是交流大约是48V ,之后经过一个两个3000uF 一个电阻的滤波,然后给三个步进驱动器供电,确保电压满足驱动器要求,以防电压过高烧坏驱动器和步进电机。
图5是急停按钮和开关按钮,急停按钮是停止步进电机,急停按钮的输入端连到步进的DIR 和STEP ,防止撞机行为。
而开关按钮是负责控制控制系统的电源。
图2并联机器人结构图(1)图3并联机器人结构图(2)摘要:并联机器人具有承载能力强、刚度大、自重负荷比小、动态性能好等特点,具有并行三自由度机械臂结构,重复定位精度高。
《具有串并混联结构腿的四足机器人设计》范文

《具有串并混联结构腿的四足机器人设计》篇一一、引言四足机器人是现代机器人技术中的重要组成部分,其在多种领域,如科研、军事、工业等领域均有广泛的应用。
其关键部分为具有灵活和适应性强的腿机构,使得四足机器人可以稳定、有效地移动于不同的复杂环境中。
为了解决这个问题,本篇论文提出了具有串并混联结构腿的四足机器人设计,这一设计方案能够在不同地面上灵活地实现行进、爬行和跨越障碍等动作。
二、四足机器人设计概述本设计的四足机器人采用串并混联结构腿的设计理念,即腿部结构既包含串联机构也包含并联机构。
这种设计方式可以有效地提高机器人的运动灵活性和稳定性。
1. 串联机构:串联机构在机器人腿部设计中主要起到支撑和驱动的作用。
通过串联的多个关节,可以实现腿部的弯曲和伸展,从而使得机器人能够进行各种复杂的动作。
2. 并联机构:并联机构则主要起到增强稳定性和负载能力的作用。
通过多个并联的连杆和驱动器,可以增加机器人在复杂环境中的运动能力和负载能力。
三、四足机器人设计详细方案1. 腿部结构设计:在腿部设计中,我们采用一种串并混联的组合方式。
这种设计方式使得腿部在拥有足够强度的同时,又保持了足够的灵活性。
我们采用高强度的材料制作连杆和关节,以增强机器人的负载能力和耐用性。
2. 关节设计:在关节设计中,我们采用电机驱动的方式。
电机通过传动装置(如齿轮或皮带)驱动关节的转动,从而实现腿部的运动。
此外,我们还设计了阻尼装置,以减少运动过程中的冲击和振动。
3. 控制策略:我们采用基于反馈的控制策略,通过传感器实时获取机器人的运动状态和环境信息,然后根据这些信息调整机器人的运动策略。
此外,我们还采用了优化算法,以提高机器人在复杂环境中的运动效率和稳定性。
四、实验与结果分析我们通过实验验证了设计的有效性。
实验结果表明,具有串并混联结构腿的四足机器人在各种复杂环境中均能实现稳定、有效的移动。
在行进、爬行和跨越障碍等动作中,该机器人均表现出较高的灵活性和适应性。
毕业设计Alpha并联机器人系统总体设计
毕业设计Alpha并联机器人系统总体设计设计目标本毕业设计的目标是设计并开发一款Alpha并联机器人系统。
该系统将具有以下功能:- 可以完成一系列预先设定的动作和任务;- 可以自动调整工作方式,以适应不同的环境和工作场所;- 具有简单直观的操作界面和操作流程;- 具有较高的稳定性和可靠性。
系统组成Alpha并联机器人系统主要由以下部分组成:- 手臂部分:用于执行各种动作和任务的机械手臂;- 控制器:控制机械手臂运动和执行任务的一款电子设备;- 操作界面:提供给用户进行系统操作的界面;- 电源系统:为机器人系统提供电能的一组设备。
系统设计手臂部分设计Alpha并联机器人的手臂部分将采用六轴机械臂结构。
每个关节都将配备高性能的电机和传感器,并与其它关节通过齿轮互相连接。
该结构可以提供机械臂运动的柔性和高度自由度,使其能够完成各种不同的动作和任务。
控制器设计本系统的控制器将采用一种高性能的微控制器。
该控制器具有快速、准确和稳定的动作执行能力,并且具有模块化的设计,易于维护和升级。
操作界面设计本系统的操作界面将采用一种简单、直观和易于使用的软件界面。
用户可以通过该界面完成系统的操作和任务设置,以适应不同的工作需求。
电源系统设计本系统的电源系统将采用高效稳定的电源设备。
该设备可以为机器人系统提供稳定可靠的功率,以保证系统的正常运行。
总结本文对毕业设计Alpha并联机器人系统的总体设计进行了介绍。
该系统将由手臂部分、控制器、操作界面和电源系统等多个部分组成,并具有高度的灵活性、稳定性和可靠性,能够完成各种不同的动作和任务,可以满足不同工作场所的需求。
并联机械手毕业设计
并联机械手毕业设计在现代工业生产中,机械手是一种非常重要的设备。
它可以在工厂中完成各种复杂的任务,如搬运重物、装配产品等。
而在机械手的设计中,一种常见的结构就是并联机械手。
并联机械手具有许多优点,比如高精度、高刚度等,因此在毕业设计中选择并联机械手作为研究对象具有一定的意义。
首先,我将介绍并联机械手的基本原理和结构。
并联机械手由多个机械臂组成,这些机械臂通过关节连接在一起,并且与固定的底座相连。
每个机械臂都由多个关节组成,这些关节可以实现旋转或移动。
通过控制每个机械臂的关节运动,可以实现机械手在三维空间内的精确定位和运动。
其次,我将介绍并联机械手在工业生产中的应用。
由于并联机械手具有高精度和高刚度的特点,因此在一些需要进行精细操作的工业领域,比如电子组装、微电子加工等,广泛应用并联机械手。
并联机械手可以实现高速、高精度的操作,提高生产效率和产品质量。
然后,我将讨论并联机械手的设计和控制方法。
在并联机械手的设计中,需要考虑机械结构的刚度和稳定性,以及各个关节的运动范围和速度。
同时,还需要设计适合的传感器和执行器,以实现对机械手的精确控制。
在控制方面,可以采用传统的PID控制方法,也可以使用先进的自适应控制算法,以实现对机械手的精确控制。
此外,我还将探讨并联机械手的发展趋势和应用前景。
随着科技的不断进步,机械手的性能和功能将不断提高。
未来的并联机械手可能具有更高的精度和更灵活的运动方式,可以应用于更广泛的领域。
比如,可以将并联机械手应用于医疗领域,用于手术操作或康复训练;也可以将其应用于航天领域,用于太空站的维护和修理等。
总而言之,毕业设计是一个非常重要的环节,它是对学生多年学习成果的检验和展示。
选择并联机械手作为毕业设计的研究对象,不仅可以深入了解机械手的原理和应用,还可以学习到机械设计和控制的相关知识。
并联机械手在工业生产中具有广泛的应用前景,研究并联机械手的设计和控制方法,对于提高机械手的性能和功能,推动工业生产的发展具有重要意义。
基于并联机构的颈椎康复机器人设计
基于并联机构的颈椎康复机器人设计摘要:随着现代工作方式的改变,越来越多的人因为长时间保持一个姿势而导致颈椎病的出现。
本文设计了一款基于并联机构的颈椎康复机器人,旨在为患者提供科学有效的康复治疗。
起首,依据人体工学原理设计出符合人体形态的支架结构,并在其上进行运动轨迹规划,同时选择合适的传动机构和执行机构;其次,搭建系统控制平台,运用PID控制思想、嵌入式技术和机器视觉技术对机器人进行控制;最后,构建虚拟现实仿真环境,对机器人进行测试并进行数据分析。
试验结果表明,本文的颈椎康复机器人具有准确性、稳定性和轻便性,适合在医院等多种环境中应用。
关键词:颈椎康复机器人;并联机构;人体工学;PID控制;机器视觉一、前言颈椎病是现代社会中常见的疾病之一,它会对患者的工作和生活带来很大的影响。
目前,医学界推崇接受康复机器人实现病人的康复治疗,这种治疗方法不仅能够提高治疗的效率,还能够缩减未建专门康复机构的地区医疗资源短缺状况。
二、机器人设计1. 机械结构设计本文的颈椎康复机器人接受了并联机构,这是一种具有较高可控性、稳定性和运动学性能较优的结构形式。
机器人具有两个工作区域,分别为颈部和肩部。
机器人的支架结构由两个平面对称的十字架构成,上部十字架用于固定机器人的耳部,下部十字架用于托住机器人的肩部。
机器人的运动轨迹是通过一个PID控制器控制的,该控制器能够实现精确控制机器人的角度和速度。
2. 控制系统设计为了控制机器人的运动,在本文中接受PID控制器,这种控制器能够实现较精准的控制效果。
在系统控制平台中,数据的采集由嵌入式系统完成,同时接受了机器视觉技术进行图像处理,这能够大大提高机器人的控制精度和速度。
3. 仿真系统设计为了对机器人的控制系统进行测试,本文接受了虚拟仿真系统对机器人进行模拟。
仿真系统构建了一个逼真的医院环境,并对机器人的各项性能进行了测试和分析。
试验结果表明,机器人的运动轨迹、速度和精度都分外符合设计要求。
并联机器人控制系统设计
并联机器人按照其自由度的不同,可以分为多自由度并联机器人跟少自由度并联机器人,每个自由度都由电机驱动。
设计通过研究并联机器人的物理结构的基础上,用差分进化解决并联机器人的正解问题。
实际求解并联机器人的正解比较困难,所以可以利用并联机器人位姿反解相比容易求取的特点, 我们运用思维转换模式把并联机器人的位姿正解问题巧妙转化成假设已知位姿正解, 再去运用数学方法通过位姿反解求得杆长值, 最终再使所求得的杆长值与给定的杆长值之差为最小的优化问题, 然后利用差分进化的全局寻优能力来直接求解并联机器人的位姿正解.然后利用MATLAB将运动轨迹离散化进行位置反解,处理机器人相应的输入数据,并将数据发送至单片机执行,驱动步进电机完成机器人控制。
本次设计采用了差分进化算法研究的并联机器人的正解问题, 同时通过对6自由度SPS 型并联机器人进行MATLAB仿真,从而验证了这种方法具有可行性。
1)这次设计并联机器人,本着其位姿反解问题相对容易求取的特点, 将求解其正解问题进行数学思维的假设,在已知其空间6 自由度参数, 将得其所给定的杆长与前边假定好了的6 自由度参数求得的杆长之差做成数学函数,求函数的最小值(解决优化问题)。
在工业中并联机器人不同于传统的串联机器人,相对于传统的串联机器人,并联机器人在需要高刚度、高精度或者大载荷而无须很大工作空间的领域内得到了广泛应用。
1T3R并联机器人设计及其实验装置研制
I
英文摘要
ABSTRACT
As a robot manipulation mechanism,the parallel kinematics robot mechanism which has the outstanding characteristics of high exactitude,high structure rigidity and high speed is widespread concerned by experts domestic and abroad.The research on 3-DOF and 6-DOF parallel robot mechanism take 80 percentage of the total research in recent years while research on 4-DOF and 5-DOF only take 9.5 percentage of the total. Actually, parallel kinematics robot of 4-DOF and 5-DOF has extensive application foreground because of its simple structure, easy manipulation, low cost, and suitability for many tasks requiring less than 6DOF in the engineering application. The research of parallel kinematics robot of 4-DOF and 5-DOF has already become the hotspot in robot research. 1T3R 4-DOF parallel kinematics robot has been taken as the research objective. First, the general method of topology structure design of low mobility parallel robot has been used to configure and regroup the branched chains which can be used for design of 1T3R 4-DOF parallel kinematics robot to carry on the symmetry and dissymmetry topology structure design.The text has taken the 1-PS-3-SPS parallel robot which can be applied for PKM and medical equipment , especially for the endoscopic surgery equipment,as the research objective and chosen the number and fixing locations of the drive pairs.Second,a method of searching the total workspace dimension based on the inverse solution equations and the restriction of structure parameters has been used to get the relation between the changes of the structure parameters and total workspace dimension with MATLAB software and a concise outline for1-PS-3-SPS parallel robot structure parameters design has been put forward; a method of searching the agile workspace dimension based on the Jacobean Matrix and the restriction of condition parameters has been used to get the relation between the changes of the structure parameters and agile workspace dimension. Third, the structure parameter proportion which can maximize the workspace dimension has been chosen. According to the design requests of the equipment, the structure design of every part of parallel robot has been carried on and all kinds of problems including problems of uncontrolled DOF,uncontrolled rotation of small struts and contradiction between the rigidity and rotating angle of the spherical joint have been discussed and solved to make sure good working performance from the structure design angle;all parts have
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
并联机器人设计论文摘要:并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。
文中从运动副分析入手,对一种运动解耦的三自由度并联机构进行了构型研究,该机构由三个正交分布的支链组成,且机构的运动副均为转动副,构成了机构动平台x、y、z三个方向的平动解耦;在机构构型研究的基础上,对其进行了运动学分析,推导出了该并联机构的运动学正反解,分析了机构输入/输出的速度和加速度等,验证了该机构运动解耦的特性。
这对该机构的动力学分析、控制策略、机构设计和轨迹规划等方面的研究,具有一定的理论意义。
关键词:三自由度并联机构;并联机器人;设计;1.课题国外现状及研究的主要成果少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值,更具有较好的应用前景,因此少自由度的并联机器人的设计理论的研究和应用领域的拓展成为并联机器人的研究热点之一。
研究少自由度并联机构最早的学者应属澳大利亚著名机构学教授Hunt ,在1983年,他就列举了平面并联机构、空间三自由度3-rps并联机构,但对四,五自由度并联机构未作详细阐述。
在Hunt之后,不断有学者提出新的少自由度并联机构机型。
在少自由度并联机构机型的研究中,三维平移并联机构得到广泛的重视。
clavel提出了一种可实现纯平运动三自由度Delta 并联机器人,在Delta机构的支链中采用平行四边形机构约束动平台的3个转动自由度。
Tsai提出的Delta机构完全采用回转副,并通过转轴的偏移扩大了Delta机构的工作空间。
在Tricept并联机床上采用的构型是由Neumann发明的一种具有3个可控位置自由度的并联机构,该机构的突出特点是带有导向装置,采用3个副驱动支链并由导向装置约束动平台。
Tsai通过自由度分析提取支链的运动学特征,系统研究了并联机构的综合问题,特别研究了一类实现三自由度平动的并联机构。
Rasim Alizade于2004年提出基于平台类型和联接平台的形式和类型进行分类的一种并联机构的结构综合和分类的新方法和公式,并综合出具有单平台和多平台的纯并联和串并联复联机构.我国燕山大学的黄真教授及其团队除了研制出解耦微型6维力传感器和微动机械,设计出一种新的高精度的机构方案外,还率先对少自由度并联机器人的基础理静刚度和精度.交大的高峰教授2002年运用复合副的概念来组合已知自由度数和自由度类型的支链,通过支链输出杆特殊的Plucker坐标来综合2-自由度的机器人。
近几年,东南大学的廷力教授、金琼等以单开链soc单元和并联机器人机构结构组成的某些规律性,以机构具有各支路结构相同且简单、不存在虚约束、工作空间较大等特点,尤其是其运动分析正、逆解数目小,且运动输入输出具有一定解耦性为目标,综合出了一类新型三平移并联机器人机构。
其中的3-RRC型机型,大学的马履中教授、小琴等对其运动学、动力学等特性上进行了深入的研究,并将其应用在多维减振平台主体机构中。
马履中等还研制一种五自由度并联机构作为中医推拿机器人。
惠平等研制一种新型三维平移并联机构作为虚拟轴机床、坐标测量机及机器人等的新型实用机型。
2.并联机器人构型设计原则1、在进行机构形式设计时,除了要满足规定的运动形式、运动规律或运动轨迹外,还应该遵循下面几项准则:(l)机构的运动链要尽可能的短。
完成同样的动作要求,应该优先选用机构构件数和运动副数少的机构,以简化其结构从而减轻重量、降低成本、减少由于零件的制造误差而形成的运动链的累积误差,运动链短有利于提高机构的刚度,减少振动。
(2)在运动副的选择上,优先选用低副。
低副机构的运动元素加工方便,容易保证配合的精度以及有较高的承载能力。
(3)适当选择原动机,使机构有好的动力学性能。
2、并联机器人的尺度设计原则以往,我们在设计阶段为了确定机器人操作手机构的尺寸和确定机器人操作手在工作空间部的位置和姿态时多数是靠经验和直觉。
现在,为了开发出高精度、高速度和高效率的并联机器人,我们在机构的综合设计时要考虑到它的工作空间的体积和形状、奇异位形、输出的各向同性等条件。
但是,在全局最优的机构尺度综合设计中,顾全到上述的所有条件是十分困难的。
国外的学者提出了许多机构综合的标准,以便在满足指定的设计指标下,机构的性能达到最优。
由于并联机器人与串联机器人相比,工作空间小。
因此为实现作业要求,在设计时要先确定能够满足性能指标的工作空间是至关重要的。
另外,在并联机构的设计过程中必须要考虑要避免构型奇异。
与串联机器人不同的是,并联机器人不仅有运动学奇异,还有由构型所导致的构型奇异。
即奇异区域通常都扩到整个工作空间或一些显著的子空间,而且是实际操作中最常用的区域。
0.M给出了判定并联机构发生构型奇异的条件:(l)如果动平台和定平台是相似的正多边形,则整个工作空间雅戈比矩阵都是奇异的;(2)如果动平台和定平台是相似的非正多边形,并且每一对相应的顶点通过一条连杆相连,则雅戈比矩阵在工作空间的大部分区域都是奇异的。
这种设计上的奇异的存在,将使并联机器人由于无法平衡施加在动平台上的负载而不能工作。
在构型奇异附近的区域,即使没有发生构型奇异,也有可能出现雅戈比矩阵条件数很大的情况,同样会导致运动和力的传递性能变的很差,我们称这种区域为病态条件区域。
因此,进行并联机构尺度综合设计时必须考虑在满足工作空间要求、运动可传递性的要求以及负载能力要求的情况下,要避开构型奇异点及奇异点附近的病态区域3.3-RPS机构图1-1所示的是一个3自由度的并联机构,由3支RCS链连接一运动平台和一固定平台组成的,因为绕圆柱副轴线的转动是一局部自由度,所以圆柱副也可以用移动副来倒替,分支等效于RPS支链,该机构的分支结构是对称的,因此,这机构称为3-RPS平台机构,以3个移动副作为输入。
(S是指球面副,球面副允许两构之间具有3个独立的,以球心为中心的相对转动,具有3个自由度;R是指转动副,允许两构件绕公共轴线作相对转动,描述了两构件之间的空间相对关系,具有一个自由度;P是指移动副,允许两构件沿公共轴线作相对直线移动,具有一个自由度)。
源于军工需求,将3-RPS并联机器人应用到火箭发射装置中可以改良传统火箭炮的平衡,射角,精确度等方面的问题。
它的多自由度和便捷的数字控制方式是多年来火箭发射装置梦寐以求的。
由自由度的计算可知,该机构能够完成两个方向的回转和一个升降运动。
这一系列运动都可以通过电机带动,经过三条RPS空间运动链的运动,从而促动上平台的各种运动姿势。
回转运动:在这种3-RPS并联机器人的机构中,下平台上的电动机带动丝杆传动。
该丝杆为滑动丝杆,滑块的运动能带动其上的RSP链随球面副摆动,从而上平台绕转动副作回转运动,即有X与Y两方向的回转运动。
升降运动:三条RPS空间运动链的同时伸缩能促动上平台的升降运动。
图1-1 3-RPS结构1.4 并联机构工作空间的分析工作空间(Workplace):设给定参考点C是动平台执行器的端点,工作空间是该端点在空间可以达到的所有点的集合。
完全工作空间(Complete workplace):动平台上执行器端点可从任何方向(位姿)到达的点的集合。
定向工作空间(Constant workplace):动平台在固定位姿时执行器端点可以到达的点的集合。
最大工作空间(Maximal workplace):动平台执行器端点可到达的点的最大集合,并考虑其具体位姿。
完全工作空间和定向工作空间都是最大工作空间的子集.另外,工作空间是并联机构的重要特性,影响它的大小和形状的因素主要有以下三个:①杆长的限制,杆件长度的变化是受到其结构限制的,每一杆件的长度必须小于最大杆长,大于最小杆长。
②转动副转角的限制,各种铰链,包括球铰接和万向铰接的转角都受到结构研制的,每一铰链的转角都应小于最大转角。
③杆件的尺寸干涉,连接动平台和固定平台的杆件都具有几何尺寸,因此各杆件之间在运动过程中可能发生相互干涉。
设杆件是直径为D的圆柱体,两相邻杆件轴线之间的距离为Di,则Di>D。
1.5 设计简介与设计要求本设计是在3-RPS并联机构的部设置一种平衡机,以使得上平台运动到任何位置时,电动推杆上的推力基本相等,给电机的控制创造条件。
该平衡机的结构形式应能适应机构的工作空间。
本设计涉及到机构学、机械传动、电力拖动与控制等方面。
通过设计工作的训练,可有效提高毕业生工程实践能力。
3-RPS并联机构的运动围为:俯仰±20°,倾侧±20°,升降300㎜,载荷1.4T。
平衡机要求能抵消总载荷的70%。
1.6 主要的研究方法和容首先研究电机的机械性能,对3-RPS并联机器人进行运动学描述和受力分析;然后着重研究如何实现机器的平衡问题,进行专用平衡机总体设计,并在此基础上作详细的计算与分析。
1.了解并联机构,对已有的3-RPS并联机器人的工作空间进行分析;2.分析平衡力矩图,探讨平衡方案,选择平衡机的安装位置,进行平衡能力计算;3.关键零部件的设计与计算。
第二章平衡机的概念与作用机理在传统的火箭发射装置中,由于其所承载的重量十分沉重,所以在设计其方向机和回转机的时候需要考虑平衡承载力矩。
由此,平衡机被提出,用来平衡起落部分的重量对耳轴产生的重力矩。
这在传统的火箭发射装置上比较易于实现,但在新提出的3-RPS并联机器人中,为了避免上平台越过其极限位置和RPS连杆在伸缩时承受到太大的重力矩。
需要在上下平台间设计一个平衡机,在上下平台间提供一个推力或拉力,从而提供对RPS连杆的平衡力矩,用以平衡伸缩时对连杆的重力矩,这就需要重新考虑其平衡机的设计了。
平衡机的作用就是对起落部分提供一个力(推力或拉力),此力对铰接点之矩称为平衡力矩,它与俯仰部分的重力矩大小相近,方向相反,以此来减小驱动RPS连杆的电机产生的力,同时消除撞击现象。
2.1 对平衡机的要求对平衡机的主要要平衡性要好。
由于重力矩是随俯仰角的大小而变化的,所以平衡机提供的平衡力矩也应作相应的变化。
这样才能使平衡机的平衡性能好,保证仰角时轻便,俯角时平稳。
此外,对平衡机的要求还有结构要简单,重量要轻,工作可靠,拆装方便,制造容易等。
2.2 平衡机的分类平衡机按平衡力的方向来分,可以分为推式和拉式两种。
对于推式平衡机,平衡机对俯仰部分的推力作用在铰接点的前方。
对于拉式平衡机,当其拉力作用在铰接点前方时称为上拉式,当其拉力作用在铰接点后方时称为下拉式。
推式平衡机结构简单,布置容易,但配置位置较暴露,易受损伤,一般用在最大仰角小于60°的装置上。
下拉式平衡机配置较隐蔽,结构紧凑,但不易布置,一般用于仰角大于60°的装置上。