旋转质量陀螺仪及其力学分析
陀螺仪工作原理
陀螺仪工作原理陀螺仪是一种能够测量和感知物体的角速度的设备。
它的工作原理基于角动量守恒定律和陀螺效应。
角动量守恒定律是指在没有外力作用的情况下,物体的角动量保持不变。
角动量是物体的转动惯量乘以角速度,通常用符号L表示。
当物体发生转动时,其角动量也随之变化。
陀螺仪利用了这一原理来测量物体的转动角速度。
陀螺效应是指一个旋转体的转轴在空间中的变化现象。
当一个旋转体的转轴发生变化时,由于角动量守恒定律的作用,转轴变化的结果会导致旋转体的转动方向发生改变。
陀螺仪利用陀螺效应来感知物体的角速度。
陀螺仪通常由一个或多个陀螺装置组成。
陀螺装置由一个旋转的陀螺和一个支撑陀螺的结构组成。
当陀螺装置受到外力或角速度的作用时,陀螺会发生偏离,此时陀螺的转轴方向就会发生变化。
陀螺仪通过检测这一转轴变化来测量物体的角速度。
陀螺仪的工作原理可以通过以下步骤来解释:1. 初始状态下,陀螺的转轴与某一确定的轴向保持一致,此时陀螺仪处于正常工作状态。
2. 当陀螺仪受到外部力矩或角速度的作用时,陀螺就会由于角动量守恒定律的作用发生偏离,转轴的方向发生改变。
3. 陀螺仪通过传感器来检测转轴的变化,并将这一信息转化为电信号。
4. 电信号经过放大和滤波等处理后,被发送到控制系统或其他设备进行进一步的处理和分析。
陀螺仪广泛应用于导航、航空、航天、自动化控制等领域。
在导航方面,陀螺仪常用于惯性导航系统,用来测量飞行器的角速度和角度,从而实现精确的导航和姿态控制。
在航空和航天领域,陀螺仪则被用于飞行器的姿态稳定和导航系统的精确控制。
在自动化控制领域,陀螺仪可以用来测量物体的转动角速度,从而实现精确的运动控制。
总结起来,陀螺仪的工作原理基于角动量守恒定律和陀螺效应。
通过测量转轴的变化,陀螺仪可以准确地测量物体的角速度和角度,从而在导航、航空、航天、自动化控制等领域中发挥重要作用。
陀螺仪的原理

陀螺仪的原理
陀螺仪的原理是基于角动量守恒定律。
角动量是描述物体转动状态的物理量,守恒定律指的是在没有外力作用下,角动量总是保持不变的。
陀螺仪通常由旋转的转子和支撑结构组成。
转子通过电机驱动高速旋转,在转子中心产生一个很大的角动量。
支撑结构将转子固定在一个特定的方向上,使其成为一个转动的轴。
当陀螺仪发生转动时,由于角动量守恒定律的作用,任何试图改变其方向的外力都会受到抵抗。
这意味着转子会保持在一个固定的方向上旋转,而不会被其他力干扰。
通过测量陀螺仪转动轴相对于参考方向的角度变化,我们可以获得物体的转动状态。
这种测量方法被广泛应用于惯性导航系统、飞行器姿态控制、自动驾驶车辆和虚拟现实等领域。
值得注意的是,陀螺仪仅可以测量物体的角速度(转动速度),而无法直接测量物体的角度。
为了获取物体的角度信息,通常需要进行积分运算,将角速度转换为角度。
然而,由于误差的累积,陀螺仪在长时间使用中可能会出现漂移现象,因此需要配合其他传感器进行校正和补偿,以提高测量的精度和稳定性。
陀螺仪原理、近似理论
1、陀螺的概念绕一个支点高速转动的刚体称为陀螺 (top)。
通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。
在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,还绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopic effect)。
2、陀螺的稳定性和进动性陀螺在不旋转的时候和普通物体一样,而当它高速旋转的时候,则具有一个明显的特征:能稳定的立在地面上不倒,如玩具“地转子”。
这种特性就是陀螺的稳定性 - 当陀螺高速旋转时,可以保持其动量矩矢量在空间方位不变。
当陀螺高速旋转时,若给陀螺施加外力矩,会引起陀螺转子相对惯性空间的转动,这种特性即为陀螺的进动性 - 当外力试图使陀螺发生倾斜时,陀螺并不沿外力的方向倒下,而是按转子的转向沿偏转 90°的方向倒下。
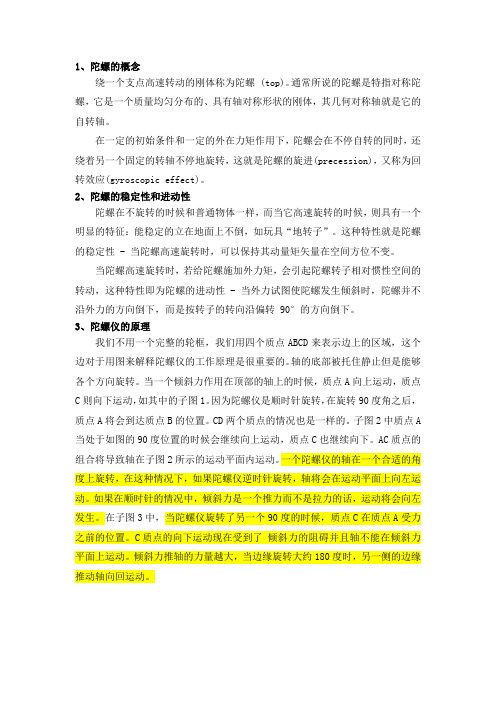
3、陀螺仪的原理我们不用一个完整的轮框,我们用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。
轴的底部被托住静止但是能够各个方向旋转。
当一个倾斜力作用在顶部的轴上的时候,质点A向上运动,质点C则向下运动,如其中的子图1。
因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。
CD两个质点的情况也是一样的。
子图2中质点A 当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。
AC质点的组合将导致轴在子图2所示的运动平面内运动。
一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。
如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。
在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。
C质点的向下运动现在受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。
倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。
陀螺仪的工作原理
陀螺仪的工作原理
陀螺仪是一种测量和感知旋转运动的装置。
它基于旋转运动的角动量守恒原理来工作。
陀螺仪通常由一个旋转的圆盘、一个支撑结构和一些测量与记录旋转运动的传感器组成。
当陀螺仪受到旋转力或力矩作用时,圆盘会继续保持其旋转状态,这是因为陀螺仪的角动量想要保持不变。
要测量旋转运动,陀螺仪使用传感器来检测圆盘的旋转速度和加速度。
传感器通常是基于电磁感应、光学传感或微机电系统(MEMS)技术等原理工作的。
其中一种常见的陀螺仪传感器是旋转速度传感器,可以测量圆盘绕一个轴线旋转的速度。
它通过检测圆盘上的旋转惯量对应的力矩来测量旋转运动。
另一种常见的陀螺仪传感器是加速度传感器,可以测量圆盘绕一个轴线旋转的加速度。
它基于质量在旋转时所受到的离心力,从而推导出旋转的加速度。
通过测量圆盘的旋转速度和加速度,陀螺仪可以确定物体的旋转方向、角速度和角加速度等参数。
这些参数在导航、航空航天、机器人技术等领域中都有广泛的应用。
陀螺仪工作原理

陀螺仪工作原理
陀螺仪利用物体的旋转运动来测量和确定物体的方向。
它基于一个原理,即旋转物体的自旋轴倾向于保持不变。
通过测量旋转轴的变化,陀螺仪可以准确地确定物体的方向。
陀螺仪通常由旋转部件和检测部件组成。
旋转部件包括陀螺盘和驱动系统,它们将物体绕一个特定的轴旋转。
检测部件包括传感器和计算单元,用于测量和分析物体的旋转。
当陀螺仪开始旋转时,陀螺盘的旋转轴会随着物体的旋转而改变。
传感器可以检测到这些旋转轴的变化,并将其转化为电信号。
计算单元接收传感器的信号,并根据这些信号计算出物体的方向。
陀螺仪的工作原理可以简单描述为以下几个步骤:首先,陀螺盘开始旋转,绕着一个特定的轴。
其次,传感器测量陀螺盘旋转轴的变化,并将其转化为电信号。
然后,计算单元接收传感器的信号,并计算出物体的方向。
最后,计算单元将计算结果输出,以供其他系统或设备使用。
陀螺仪的工作原理较为复杂,但它在导航、航空航天、惯性导航等领域中具有广泛的应用。
通过测量物体的旋转轴变化,陀螺仪可以提供准确的方向信息,帮助人们导航、定位和控制物体的运动。
陀螺仪原理、近似理论
1、陀螺的概念绕一个支点高速转动的刚体称为陀螺 (top)。
通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。
在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,还绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopic effect)。
2、陀螺的稳定性和进动性陀螺在不旋转的时候和普通物体一样,而当它高速旋转的时候,则具有一个明显的特征:能稳定的立在地面上不倒,如玩具“地转子”。
这种特性就是陀螺的稳定性 - 当陀螺高速旋转时,可以保持其动量矩矢量在空间方位不变。
当陀螺高速旋转时,若给陀螺施加外力矩,会引起陀螺转子相对惯性空间的转动,这种特性即为陀螺的进动性 - 当外力试图使陀螺发生倾斜时,陀螺并不沿外力的方向倒下,而是按转子的转向沿偏转 90°的方向倒下。
3、陀螺仪的原理我们不用一个完整的轮框,我们用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。
轴的底部被托住静止但是能够各个方向旋转。
当一个倾斜力作用在顶部的轴上的时候,质点A向上运动,质点C则向下运动,如其中的子图1。
因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。
CD两个质点的情况也是一样的。
子图2中质点A 当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。
AC质点的组合将导致轴在子图2所示的运动平面内运动。
一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。
如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。
在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。
C质点的向下运动现在受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。
倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。
旋转质量陀螺仪及其力学分析
Jcx Jcy
dd[tJcz( sin )]Mz
(1)
2020/4/18
37
1.利用欧拉动力学方程列写陀螺运动微分方程
(2) 考虑转子、内环列写欧拉动力学方程
内环的角动量
Jbx Hb Jbycos
Jbzsin
转子和内环的角动量
(JcxJbx)
H1 (JcyJby)cos
Jcz(sin)Jbzsin
1.利用欧拉动力学方程列写陀螺运动微分方程
坐标系:
OXYZ 固定坐标系 O x y z 动坐标系
2020/4/18
33
1.利用欧拉动力学方程列写陀螺运动微分方程
二自由度陀螺的广义坐标:
转子轴绕外环轴的转角
转子轴绕内环轴的转角
欧拉方程:
dHx
dt
0
dH y dt dHz
ddt[Jcz(&&sin)]Mz
陀螺的输出转角与输入转角速度的积分成正比(积分陀螺)
2020/4/18
29
4.单自由度陀螺的单位阶跃响应
(4)无约束时的运动规律
JH
Ht tdtd K t t tdtdt
J 00
00
输出转角与输出转角速度的二次积分成正比(二次积分陀螺 )
2020/4/18
30
5.单自由度陀螺的方框图与传递函数
转子角动量在框架坐标系中表示为:
H c J e ( x & ) i J e ( y c o s z s i n ) j J z ( z c o s y s i n ) k
2020/4/18
21
3.单自由度陀螺的运动方程
(3) 组件
组件的角动量 HBHbHc
陀螺仪的工作原理
陀螺仪的工作原理陀螺仪是一种用于测量和跟踪物体角速度的仪器,它可以通过测量物体在三个轴上的角速度来确定物体的方向和位置。
陀螺仪的工作原理基于陀螺效应,即旋转物体在转动时会产生一个相对于旋转轴的稳定轴。
一般来说,陀螺仪由一个旋转的转子和一个支撑转子的框架组成。
转子通常是一个圆盘形的金属盘,它可以在一个轴上自由旋转。
当物体旋转时,陀螺效应会使转子绕着自己的轴旋转,从而产生一个稳定的轴。
陀螺仪可以通过测量转子旋转时产生的角动量来确定物体的角速度。
角动量是一个物体在转动时所具有的动量,它等于物体的质量乘以它的角速度和它的转动惯量。
转动惯量是一个物体在转动时所具有的惯性,它取决于物体的形状和质量分布。
陀螺仪通常使用角速度传感器来测量转子旋转时产生的角动量。
角速度传感器可以通过测量转子绕着它的轴旋转时产生的电信号来确定转子的角速度。
这些信号可以被放大和处理,以便用于确定物体的角速度和方向。
陀螺仪的精度和灵敏度取决于它的转速和转动惯量。
当转速越高时,陀螺仪的精度和灵敏度就越高。
然而,高转速也会导致陀螺仪的磨损和故障。
为了提高陀螺仪的精度和灵敏度,一些高精度陀螺仪使用了超导技术和激光陀螺仪技术。
超导陀螺仪利用超导材料的特性来减少转子的摩擦和磨损。
超导材料可以在低温下表现出超导电性,从而减少转子的电阻和能量损失。
这使得超导陀螺仪可以在高速和高精度下工作,而不会受到摩擦和磨损的影响。
激光陀螺仪利用激光束的干涉效应来测量转子的旋转。
激光束会被分成两束,一束沿着转子的旋转方向传播,另一束垂直于旋转方向传播。
当两束激光束重新合并时,它们会产生一个干涉图案,可以用来测量转子的旋转角度和方向。
激光陀螺仪具有高精度和高稳定性,但它也需要高精度的光学元件和稳定的光源。
总之,陀螺仪是一种重要的测量和跟踪工具,它可以用于飞行器、导航系统、惯性测量装置等领域。
陀螺仪的工作原理基于陀螺效应,它可以通过测量转子旋转时产生的角动量来确定物体的角速度和方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F
2018/10/14
14
二 单自由度陀螺的运动方程与动力学分析
1.单自由度陀螺感受转动的特性
ω
F
A
y
Myቤተ መጻሕፍቲ ባይዱ
ω
F
A
2018/10/14
15
二 单自由度陀螺的运动方程与动力学分析
2.外力矩作用下单自由度陀螺的进动
力矩沿x轴方向时且基座绕y轴无转动时: 与普通的刚体相同。 2018/10/14
16
二 单自由度陀螺的运动方程与动力学分析
6
一 自由陀螺仪的基本特性
1.自由陀螺仪的进动性(Spin Precession)
2018/10/14
7
一 自由陀螺仪的基本特性
1.自由陀螺仪的进动性(Spin Precession)
2018/10/14
8
一 自由陀螺仪的基本特性
1.自由陀螺仪的进动性(Spin Precession)
织女星 北极星
)i ( cos sin ) j ( cos sin )k b (x y z z y
) bx ( x by y cos z sin
bz z cos y sin
框架角动量在框架坐标系中表示为:
2.外力矩作用下单自由度陀螺的进动
My
ω
2018/10/14
力矩沿y轴方向时:绕框架轴进动。
17
二 单自由度陀螺的运动方程与动力学分析
3.单自由度陀螺的运动方程
单自由度陀螺的运动方程式是指陀螺组件的运动方程式。
y
yb
zb H
xb
2018/10/14
18
3.单自由度陀螺的运动方程 (1) 框架
第二章
旋转质量陀螺仪及其力学分析
2018/10/14
1
§2.1 旋转质量陀螺仪的一般原理 一 自由陀螺仪的基本特性
简化模型:
(1)转子绕自转轴匀速自转; (2)自转角动量远大于非自转 角速度产生的角动量; (3)转子的质心与支承框架的 中心重合; (4)陀螺系统的各个部件都是 刚性的。
2018/10/14 2
2018/10/14
9
2018/10/14
10
一 自由陀螺仪的基本特性
2.自由陀螺仪的稳定性(spin stabilization)
M 0
di H 0 dt
H const
自由陀螺仪的定轴性实质上是指陀螺仪具有巨大的 抗干扰的能力。
2018/10/14 11
一 自由陀螺仪的基本特性
3.陀螺力矩与陀螺效应 陀螺外环同时受到外力矩和 陀螺力矩作用,二者大小相 等,方向相反,使外环处于 平衡状态,相对惯性空间方 位稳定。 陀螺力矩所产生的这种外环稳定效应,称为陀螺动力 稳定效应,简称陀螺动力效应。
框架相对基座的角速度在框架坐标系中可以表示为:
br i
基座相对惯性空间的角速度在框架坐标系中可表示为:
be x i ( y cos z sin ) j (z cos y sin )k
2018/10/14 19
3.单自由度陀螺的运动方程
框架相对于惯性空间的角速度:
§2.1 旋转质量陀螺仪的一般原理
一
自由陀螺仪的基本特性
简化模型
H J x x i J y y j J z z k
z x
z y
H J z z k Hk
2018/10/14 3
一 自由陀螺仪的基本特性
简化模型
di H M dt
dH ω H M dt
Hω y M x Hωx M y
2018/10/14
Mx ωy H
ωx My H
5
一 自由陀螺仪的基本特性
1.自由陀螺仪的进动性
(Spin Precession)
陀螺转子轴在外 力矩作用下,绕 与外力矩相垂直 的方向的转动运 动,称为陀螺的 “进动运动” 。
2018/10/14
3.单自由度陀螺的运动方程
) H Bx ( J e J bx )( x H By ( J e J by )( y cos z sin ) H Bz H ( J z J bz )( z cos y sin )
转子角动量在框架坐标系中表示为:
Hc Je (x )i Je (y cos z sin ) j J z ( z cos y sin )k
2018/10/14
21
3.单自由度陀螺的运动方程 (3) 组件
组件的角动量
H B Hb Hc
)i J ( cos sin ) j J ( cos sin )k H b J bx (x by y z bz z y
2018/10/14 20
3.单自由度陀螺的运动方程 (2) 转子
转子相对惯性空间的角速度:
)i ( cos sin ) j ( cos sin )k c (x y z z y
)i ( J J )( cos sin ) j H B ( J e J bx )( x e by y z [ J z ( J z J bz )( z cos y sin )]k
设陀螺的角动量
H J z
22
2018/10/14
dH 0 dt
2018/10/14
ω H M
4
一 自由陀螺仪的基本特性
0 ωz ω y ωz 0 ωx ωy 0 M x ωx 0 M y 0 H M z
Hω y M x Hω M x y 0 M z
2018/10/14 12
一 自由陀螺仪的基本特性
3.陀螺力矩与陀螺效应
陀螺动力稳定效应对内框架无效!
2018/10/14 13
一 自由陀螺仪的基本特性
3.陀螺力矩与陀螺效应
当基座绕垂直于自转轴的 方向转动时,轴承带动自 转轴改变方向,强迫转子 进动。强迫进动所产生的 陀螺力矩,将引起自转轴 两端轴承的附加压力,压 力过大时,造成转轴弯曲 或轴承损坏。