等参单元及其应用
04-等参数单元
第四章 等参数单元为了方便应用和提高计算精度,目前许多实用程序采用了等参数单元,取得了较好的效果。
本章从平面问题的任意四边形单元入手,介绍等参数单元的一些基本概念,并根据工程实际应用需要,重点介绍空间六面体等参数单元分析。
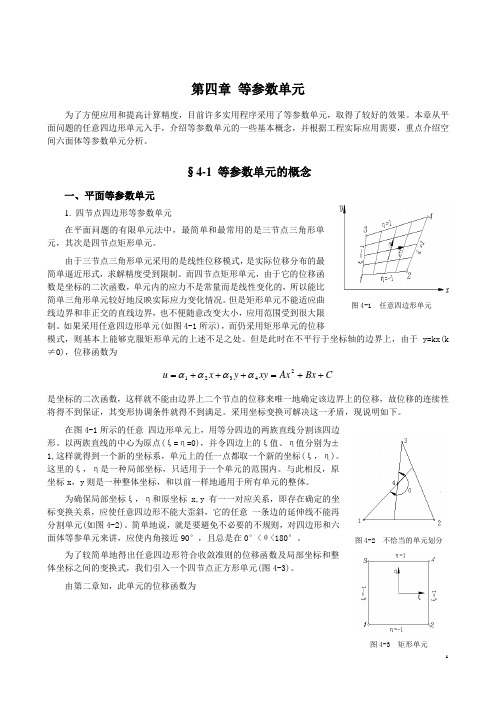
§4-1 等参数单元的概念一、平面等参数单元1. 四节点四边形等参数单元在平面问题的有限单元法中,最简单和最常用的是三节点三角形单元,其次是四节点矩形单元。
由于三节点三角形单元采用的是线性位移模式,是实际位移分布的最简单逼近形式,求解精度受到限制。
而四节点矩形单元,由于它的位移函数是坐标的二次函数,单元内的应力不是常量而是线性变化的,所以能比简单三角形单元较好地反映实际应力变化情况。
但是矩形单元不能适应曲线边界和非正交的直线边界,也不便随意改变大小,应用范围受到很大限制。
如果采用任意四边形单元(如图4-1所示),而仍采用矩形单元的位移模式,则基本上能够克服矩形单元的上述不足之处。
但是此时在不平行于坐标轴的边界上,由于y=kx(k ≠0),位移函数为C Bx Axxy y x u ++=+++=24321αααα是坐标的二次函数,这样就不能由边界上二个节点的位移来唯一地确定该边界上的位移,故位移的连续性将得不到保证,其变形协调条件就得不到满足。
采用坐标变换可解决这一矛盾,现说明如下。
在图4-1所示的任意 四边形单元上,用等分四边的两族直线分割该四边形。
以两族直线的中心为原点(ξ=η=0),并令四边上的ξ值、η值分别为±1,这样就得到一个新的坐标系,单元上的任一点都取一个新的坐标(ξ,η)。
这里的ξ,η是一种局部坐标,只适用于一个单元的范围内。
与此相反,原坐标x ,y 则是一种整体坐标,和以前一样地通用于所有单元的整体。
为确保局部坐标ξ,η和原坐标x,y 有一一对应关系,即存在确定的坐标变换关系,应使任意四边形不能大歪斜,它的任意 一条边的延伸线不能再分割单元(如图4-2)。
有限元分析与应用 第6讲、等参单元
我们可以看到,位移插值函数公式(3)和 坐标变换公式(4)具有完全相同的形式,它们 用同样数目的对应节点值作为参数,并有完 全相同的形状函数 N (ζ ,η ), 作为这些节点 值前面的系数,我们称具有这种特点的单元 为等参数单元
i
等参变换步骤: 等参变换步骤
1找变换 x = x(ξ ,η ), y = (ξ ,η ) ,使x0y面上的任意四边形变成在 上的边长为2的正方形.
1 4 1 4 1 4 1 4
(1 − ξ )(1 − η ) (1 + ξ )(1 − η ) (1 + ξ )(1 + η ) (1 − ξ )(1 + η )
利用节点处得(ξ,η)坐标,上式可以写成统一得形式:
1 Ni (ξ ,η ) = (1 + ξiξ )(1 + ηiη ) 4
其中(ξi,ηi)为
ξoη 面
2在 ξoη 面上构造多项式插值函数 N k (ξ ,η ) 满足µ = ∑ N k (ξ ,η )µ k
3再变回xoy即: µ = ∑ N k (ξ ( x, y ) η ( x, y ))µ k = ∑ N k ( x, y )µ k 由于在 ξoη 面交界两测 u是连续的,xoy 面上也同样连续,但现在 N k (x, y )已经不 再是x,y的多项式了.
等参数单元平面问题变换的有限元格式
前面讲的建立有限元计算格式的推导过程中,前几步的主要 目的是求出以节点位移表示的单元位移插值函数,或求出单元形 状函数,后几步的主要目的是求出单元刚度矩阵,然后是用已知节 点位移计算应力。对于等参数单元,上面得到了四节点四边形等 参数单元的形状函数,下面主要讨论单元刚度矩阵的形成。 单元应变—单元位移—节点位移之间的关系. 由平面问题几何方程和位移插值公式(3)有:
5.1.15.1等参数单元及空间问题分析
5.1.2等参单元小结
1、等参单元存在的充要条件是|J|≠0
为了保证能进行等参变换(即总体坐标与局部坐标一 一对应),通常要求总体坐标系下的单元为凸,即不能有 内角大于或等于或接近180度情况。
2、等参单元的优点是当单元边界呈二次以上的曲线时,容 易用很少的单元去逼近曲线边界。
4
Ni
,
1 4
1
i
1i
i = 1,2,3,4
同矩形单元位移形函数
2) 单元应变
将位移表达式代入几何方程得等参单元的应变
u
0
0
x ε 0 u
x
v y
0
v
N1 ,
y
0
0 N1
N2 0
0 N2
N3 0
0 N4 N3 0
0
u1
N4能很好地适应曲线边界和准确地模拟结构形状,又能具 有较高次的位移模式,
等参单元(iso-parametric element)的概念:等参数 单元就是对单元几何形状和单元内的参变量函数采用相同数 目的节点参数和相同的形函数进行变换而设计出的一种新型 单元。
思路:任意直四边形可看成是正四边形(常称为母元)的变形, 由于正四边形(母元)的位移函数、单刚矩阵均已得到,则 可利用正四边形单元的结果研究任意四边形。
。
5.1.1 平面4节点等参单元 1)等参变换(坐标映射)
目的:建立矩形母单元与任意四边形单元的坐标映射关系
已知:
xi yi
f
ii
(i=
1,2,3,4)求, :
x y
f
解法:插值 x 1 2 3 4
第04章 等参数单元
7.1 注意事项
(1) 选择 位移插 值函数 时,自 然坐标系中的形函数 表达式 必须满足满足完备协调条件。 课 本上介绍的各 类等参元都是 完备协调单元。
等参元的 收敛性 (4) 为 了 确保等参元坐标变换 ,在每 一个单元上能 确定整 体坐标与自然坐标之间 的一一 对应关系,使变换真 正能够 进 行 ,必须 使变换 行列式 在 J 整个单元上均 不等于 零。 (5) 实 践证明 ,一般 等参元计算精度最高的所谓 应力佳 点 都在高 斯积分点上, 各边中间节点 其次,角节点 处精度 最 差。 如 果 想得到 节点处 的应力,可以在计算 出高斯积分应 力 后,再 用形函 外插到 节点上 去,这样做可以提高计算精 度。
注意:形函数表达式是自然坐标的函数。两种坐标之
间 的变换一般只 能按上式作正 变换, 逆变换 不存在。
等参元的 基本概 念
形 函数
2 形函数
1.2.2 等参数单元的定义
由于 两坐标系的坐标系变 换与位移插值 采用的 是同一 形状 函 数,亦 即进行 坐标变 换采用的节点数与插 值单元位移所 用的 节 点数相 等,故称此类单元为等参数单元, 简称等参元。 以 一维结构为例加以说明: 考虑 单元内 x 方向位移。令 ui 表示节 点位移, xi 表示节 点 坐标, 则插值公式为
七 等参元的收敛性
详细讲 述有限 元的收敛性、 收敛速 度和收敛精度,需要 涉 及一些专门的数学知识,而且在某些动力 问题和非线性 问题中, 收敛性 问题仍 是有待 解决的有限元高级课 题。 对 于 线性平面问题 , 有 限元分 析的收敛性和 收敛精度主 要 取决于 位移插 值函数的性质 、单元 剖分的数量和 质量。
4.3 二维高斯积分公式
单元等效节点载荷
等参单元在货车转向架强度计算中的应用
等参单元在货车转向架强度计算中的应用王超,许平中南大学轨道交通安全教育部重点实验室, (410075)Email:wangchao426@摘 要: 本文详细推导了八节点六面体等参单元的应变矩阵、刚度矩阵,对该单元的位移解 收敛性和畸变敏感性进行了分析。
针对转向架强度分析的特点,在 MATLAB 平台上开发了 一套求解位移的有限元程序。
该程序通过读取 ANSYS 软件输出的数据文件中的信息,采用 八节点六面体等参单元,求出单元刚度矩阵及单元体积力矩阵,组集单元,引入位移边界条 件,得到一组以节点位移为未知量的多元线性方程组,求解得到单元节点位移。
最后对 160km/h 货车转向架侧架的主要载荷进行了位移计算,结果与 ANSYS 软件计算结果基本吻 合。
关键词: 等参单元;单元刚度矩阵;有限元程序;货车转向架 重载、 高速已经成为铁路货运的发展趋势。
作为铁路货车关键部位的货车转向架对重载 和高速下的安全运行有着重要的影响。
而侧架是转向架的重要组成部分, 必需对侧架进行结 构强度分析[1]。
而有限元法正是目前研究结构强度分析的有力工具。
等参元在有限元法的发展中占有重要位置, 由于它能使局部坐标系内的形状规则的单元变换为总体坐标系内形状扭 曲的单元,而为求解域是任意形状的实际问题的求解提供例如有效的单元形式。
通过编制有限元的各种单元求解程序, 不仅可以掌握目前商用软件的求解机理, 而且对 工程实际问题的结构强度分析有着重要的指导意义。
本文正是针对转向架的结构强度分析特 点,在 MATLAB 平台上开发了一套采用六面体八节点单元的有限元求解程序,并成功地运 用到 160km/h 货车转向架侧架的强度计算分析中。
1 等参单元在有限元分析中, 用较少的形状规则的单元离散几何形状比较复杂的求解域常会遇到的 困难,因此需要寻找适当的方法将规则形状的单元转化为其边界为曲线或者曲面的相应单 元。
在有限单元法中最普遍采用的变换方法是等参变换, 即单元几何形状的变换和单元内的 场函数采用相同数目的节点参数及相同的插值函数进行变换。
有限元导论-第六章 等参数单元
14.
% 平面应力的弹性常数
15.
A1 = mu ;
16.
A2 = (1-mu)/2 ;
17.
A3 = E/(1-mu^2) ;
18.
% 平面应变的弹性常数
19.
%A1 = mu/(1-mu) ;
20.
%A2 = (1-2*mu)/2/(1-mu) ;
21.
%A3 = E*(1-mu)/(1+mu)/(1-2*mu) ;
1、四节点单元
在平面问题中,我们曾经介 绍了两种最简单的单元,三角形 单元和矩形单元。所采用的是线 性和双线性的位移模式,他们是 对实际位移分布的最低级逼近, 精度有限。矩形单元难以应用于 非规则边界和构造梯度网格以获 取关键区域的细节。这节介绍的 平面等参元是直边或曲边的任意 四边形,可以适应不规则的边界 和构造梯度网格,并具有较高的 精度。
28.
% 2 x 2 高斯积分点和权系数
29.
x = [-0.577350269189626, 0.577350269189626] ;
30.
w = [1, 1] ;
31.
for i=1:1:length(x)
32.
for j=1:1:length(x)
33.
B = MatrixB( ie, x(i), x(j) ) ;
权系数 2
1
5 9 0.555555555555555
0.6 0.774596669241483
3
5
0
8 9 0.888888888888888
二阶的高斯积分法
1111f(,)dd11im 1Wif(i,)djn1Wj im 1Wif(i,j)
有限单元法 第5章 等参单元
! "#! 平面等参单元
第 & 章介绍的三角形单元的计算精度较低 " 而矩形单元虽然有较高的计算精度 " 但只 能适应于比较规则的区域 # 对于不规则的区域 " 必须用任意等参单元来代替 # 下面介绍直 四边形等参单元和曲四边形等参单元这两种较常用的单元 # ! "# ""! 直四边形等参单元 # " 单元刚度矩阵 图! % 知道 " 标准 " # 所示为边长为 % 的正方形标准单元和直四边形单元 # 由式 $ & ! ’ ! 元的位移函数为 & !!!! (’ ’( # )
然后在此基础上再进行如下的分析利用母单元的形函数和单元结点位移建立子单元的位移场有了单元的位移函数就可以利用虚位移原理或最小势能原理来建立等参单元的单元刚度方程章介绍的三角形单元的计算精度较低而矩形单元虽然有较高的计算精度但只能适应于比较规则的区域对于不规则的区域必须用任意等参单元来代替下面介绍直四边形等参单元和曲四边形等参单元这两种较常用的单元知道标准元的位移函数为直四边形等参元其中章的步骤进行它本身并没有多大的使用价值但可以利用它得到实际计算单元利用形函数式平面上的四个角点如果对实际计算单元的位移函数仍采用标准元的形函数即可以证明它满足完备性和协调性的要求由于描述单元变形的函数和描述单元几何形状的函数相同故称计算元为等参单元将位移函数式1234矩阵集中力集中力的处理很简单一般直接把集中力作用点取为结点不需要作特殊处理就可以直接把集中力加入到结点荷载列阵中去体积力设单元内单位体积上作用的体积力为则移置到单元各结点的等效结点力为表面力设单元某边上作用的表面力为曲四边形等参单元如果是非线性的相应的变换不仅可以把标准单元的结点映射到计算单元的结点而且可以将标准单元的直边映射为计算单元的曲边图所示为曲四边形等参单元曲四边形等参单元由于标准单元有空间轴对称等参单元上一章介绍的空间轴对称问题采用三角形线性单元进行分析往往精度差不能很好地处理弯曲边界并且使相应的空间有限元分割变得十分困难如果采用等参单元进行分割则要方便得多并且各单元之间的相互关系也变得比较清楚下面介绍一种较常用的四边形等参单元单元刚度矩阵利用建立平面等参单元的方法可以建立空间等参单元在空间轴对称问题中采用的整体坐标系是圆柱坐标系坐标系的映射关系和位移模式分别采用下列形式对于图以消除奇异项单元刚度矩阵为体积力设单元内单位体积上作用的体积力为则移置到单元各结点的等效结点力为表面力设单元某边上作用的表面力为分别为单元表面力在作用边外法线方向和切线方向的投影则移置到单元各结点的等效结点力为72573737如果在自然坐标系表示的插值函数中含有刚体位移那么在总体坐标系中常应变条件是可以保证满足的提示如果含有常应变那么可写出6
有限元法应用_等参数单元
K B D B dv B D B dxdydz t B D B dxdy
e
将坐标变换式代入
ve
为计算方便,在ξ、η坐标下计算以上积分,即利用等参变换公式进行 变量替换, 则有 dx dy
ve
Ae
J d d
等参元的基本思想是:首先导出关于局部坐标系的规整 形状的单元(母单元)的高阶位移模式的形函数,然后利用 形函数进行坐标变换,得到关于整体坐标系的复杂形状的单 元(子单元),如果子单元的位移函数插值结点数与其位置 坐标变换结点数相等,其位移函数插值公式与位置坐标变换 式都用相同的形函数与结点参数进行插值,则称其为等参元。
y N i y N i
T T
1
J
——Jacobi 矩阵
所以有Βιβλιοθήκη N i x x N x i y
x, y
u x, y
ve j ue j
j
i
uie
x
p1,1
m1,1
0,0
i 1,1
j 1,1
三、单元分析
s
在单元内部分 假定: l 1,1 k 1,1
e vk
y
r
v
vle
0,0
i 1,1
4
l
e i
u
e l
vx, y u x, y
0 N1
N2 0
0 N2
N3 0
0 N3
N4 0
其中
0 N4
0 N 2 y N 2 x
N 3 x 0 N 3 y
0 N 3 y N 3 x