锁相环的基本原理和模型
锁相环基本原理

锁相环基本原理
锁相环(Phase Locked Loop,PLL)是一种常用的电子电路,可以用来解决信号同步和频率合成等问题。
它的基本原理是通过比较两个信号的相位差,通过反馈调节使得相位差保持在一个稳定的值,从而达到信号同步的目的。
锁相环的基本组成部分包括相位检测器、低通滤波器、振荡器和分频器等。
其中,相位检测器是锁相环的核心部件,它的作用是将输入信号和反馈信号进行比较,得到相位差信号。
常用的相位检测器有边沿检测器、乘积检测器和采样保持器等。
在锁相环的工作过程中,输入信号经过相位检测器与反馈信号进行比较,产生相位差信号,经过低通滤波器进行滤波处理,然后输出给振荡器进行调节,从而使得振荡器的输出信号与输入信号达到同步。
如果输入信号的频率发生变化,相位差信号也会随之变化,这时锁相环会通过反馈调节振荡器的输出频率,使得相位差保持在一个稳定的值。
锁相环在实际应用中具有广泛的用途,如在通信系统中用于时钟恢复和信号重构,可以提高信号质量和传输距离;在计算机系统中用于时钟同步和频率合成,可以提高计算机的稳定性和性能;在音频系统中用于音频合成和去噪,可以提高音质和降低噪声等。
锁相环作为一种常用的电子电路,其基本原理是通过比较两个信号的相位差,通过反馈调节使得相位差保持在一个稳定的值,从而达到信号同步的目的。
它在实际应用中具有广泛的用途,可以提高系统的稳定性和性能,提高信号质量和传输距离,降低噪声等。
锁相环的基本原理,锁相环的相位模型及传输函数
锁相环的基本原理,锁相环的相位模型及传输函数
锁相的意义是相位同步的自动控制,能够完成两个电信号相位同步的自动控制闭环系统叫做锁相环,简称PLL。
它广泛应用于广播通信、频率合成、
自动控制及时钟同步等技术领域。
一个典型的锁相环(PLL)系统,是由鉴
相器(PD),压控荡器(VCO)和低通滤波器(LPF)三个基本电路组成,
如图1,
一、鉴相器(PD)构成鉴相器的电路形式很多,这里仅介绍实验中用到
的两种鉴相器。
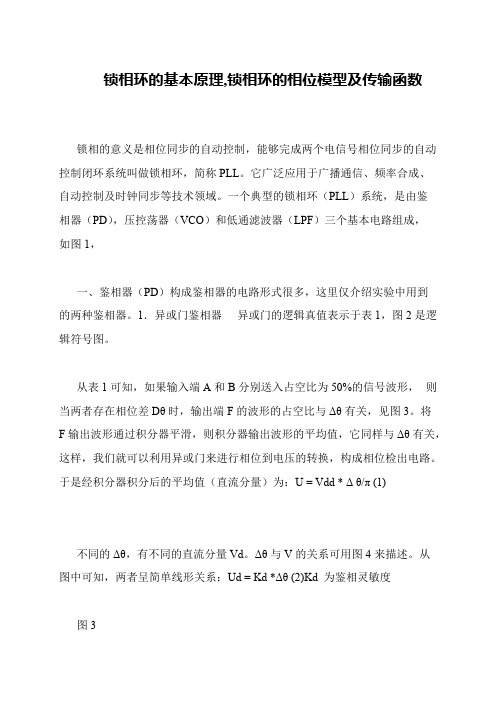
1.异或门鉴相器异或门的逻辑真值表示于表1,图2是逻辑符号图。
从表1可知,如果输入端A和B分别送入占空比为50%的信号波形,则当两者存在相位差Dθ时,输出端F的波形的占空比与Δθ有关,见图3。
将
F输出波形通过积分器平滑,则积分器输出波形的平均值,它同样与Δθ有关,这样,我们就可以利用异或门来进行相位到电压的转换,构成相位检出电路。
于是经积分器积分后的平均值(直流分量)为:U = Vdd * Δθ/π (1)
不同的Δθ,有不同的直流分量Vd。
Δθ与V的关系可用图4来描述。
从
图中可知,两者呈简单线形关系:Ud = Kd *Δθ (2)Kd 为鉴相灵敏度
图3。
锁相环的工作原理

锁相环的工作原理
锁相环是一种控制器件,其主要的工作原理是通过比较参考信号和反馈信号的相位差异,并通过反馈调节来达到将两个信号相位同步的目的。
具体工作原理如下:
1. 参考信号生成:锁相环中需要提供一个参考信号,一般通过参考信号发生器产生一个稳定的频率信号。
2. 相频检测与比较:通过相频检测器进行参考信号和反馈信号的相位差检测。
相频检测器通常使用一个比较器进行相位比较,输出一个误差信号,表示相位差偏离。
3. 误差调节:根据相频检测器输出的误差信号,通过滤波器和放大器等组成的控制电路进行调节。
调节的方式可以是改变反馈信号的延时、幅度或频率等。
4. 信号生成与反馈:控制电路输出的调节信号作用于振荡器或VCO(Voltage Controlled Oscillator),调节振荡器的频率、相位等,使得反馈信号与参考信号的相位差逐渐减小。
5. 循环反馈:经过一段时间的调节,反馈信号的相位与参考信号趋于同步,此时锁相环达到稳定状态。
同时,稳定状态下的输出信号也可以作为反馈信号传回控制电路,参与后续的相频检测和误差调节,形成一个闭环反馈系统。
通过反复的相频检测和误差调节,锁相环能够将输出信号与参
考信号同步,并具有抑制噪声、消除相位漂移、提高系统稳定性等优点。
它广泛应用于通信、精密测量、控制系统等领域。
锁相环原理

锁相环原理一、锁相环是什么?锁相环是一种利用相位同步产生电压,去调谐压控振荡器以产生目标频率的负反馈控制系统。
锁相环就是通过负反馈控制系统,让压控振荡器的固有振荡频率fo 和输入的参考信号fi 的相位保持在误差允许范围内,从而让振荡频率fo达到和参考信号fi 同步相位频率的目的。
一般来说,参考信号fi 的信号特性更好,通过锁相系统提高振荡频率fo的信号特性,同时还可以将参考信号fi 转化为你想要的任意(最好整数倍)频率信号。
二、基本理论1.工作原理最基础的锁相环系统主要包含三个基本模块:鉴相器(Phase Detector:PD)、环路滤波器(L00P Filter:LF)其实也就是低通滤波器,和压控振荡器(Voltage Controlled Oscillator:VCO)。
有了这三个模块的话,最基本的锁相环就可以运行了。
但我们实际使用过程中,锁相环系统还会加一些分频器、倍频器、混频器等模块。
(这一点可以类比STM32的最小系统和我们实际使用STM32的开发板)我们从锁相系统开始运行的那一刻进行分析,这个时候鉴相器有两个输入信号,一个是输入的参考信号Vin,另一个是压控振荡器的固有振荡信号Vout。
这个时候由于两个信号的频率不相同,会因为频差而产生相位差,如果不对压控振荡器进行任何操作,那么相位差会不断累积,从而跨越2Π角度,从零重新开始测相位,如图3所示。
这便是测量死区,明明相位在不断变大,但鉴相器只能测出0~2Π的范围,测出的相位差最大便是2Π,这样就导致了鉴相器的输出电压只能在一定的范围内波动。
理想状态是让这两个信号的相位差一直保持在2Π的范围内,不进入测量死区。
那么在系统刚开始的时候,鉴相器测出两个信号的相位差,将相位差时间信号转化为误差电压信号输出(具体转化过程见鉴相器讲解)。
通过环路滤波器转化为压控电压加到压控振荡器上,使压控振荡器的输出频率Vout逐步同步于输入信号Vin,直到两个信号的频率逐渐同步,相位差也在测量误差范围内,那么整个系统就稳定下来了。
锁相环的基本原理含模型.doc

1.锁相环的基本原理和模型在并网逆变器系统中,控制器的信号需要与电网电压的信号同步,锁相环通过检测电网电压相位与输出信号相位之差,并形成反馈控制系统来消除误差,达到跟踪电网电压相位和频率的目的。
一个基本的锁相环结构如图 1-1 所示,主要包括鉴相器,环路滤波器,压控振荡器三个部分。
Xi Phasedetector VeVc Xo Loop fliter VCO图1-1 基本锁相环结构鉴相器的主要功能是实现锁相环输出与输入的相位差检测;环路滤波器的主要作用应该是建立输入与输出的动态响应特性,滤波作用是其次;压控振荡器所产生的所需要频率和相位信息。
PLL 的每个部分都是非线性的,但是这样不便于分析设计。
因此可以用近似的线性特性来表示 PLL 的控制模型。
鉴相器传递函数为:Vd Kd ( Xi Xo)压控振荡器可以等效为一个积分环节,因此其传递函数为:Ko S由于可以采用各种类型不同的滤波器(下文将会讲述),这里仅用 F (s) 来表示滤波器的传递函数。
综合以上各个传递函数,我们可以得到, PLL 的开环传递函数,闭环传递函数和误差传递函数分别如下:K o K d F (s), G cl (s) K o K d F (s) SG op( s) S K , H ( s) S K K F (s)S K F (s)o d o d上述基本的传递函数就是PLL 设计和分析的基础。
2.鉴相器的实现方法鉴相器的目的是要尽可能的得到准确的相位误差信息。
可以使用线电压的过零检测实现,但是由于在电压畸变的情况下,相位信息可能受到严重影响,因此需要进行额外的信号处理,同时要检测出相位信息,至少需要一个周波的时间,动态响应性能可能受到影响。
一般也可以使用乘法鉴相器。
通过将压控振荡器的输出与输入相乘,并经过一定的处理得到相位误差信息。
在实际的并网逆变器应用中还可以在在同步旋转坐标系下进行设计,其基本的目的也是要得的相差的数值。
简述锁相环的基本的原理
锁相环的基本原理1. 介绍锁相环(Phase Locked Loop,简称PLL)是一种广泛应用于电子领域的反馈控制系统。
它通过比较输入信号的相位和参考信号的相位差,并通过相位差的反馈控制,使得输出信号的相位与参考信号保持稳定的关系。
锁相环广泛应用于频率合成器、通信系统中的时钟恢复、频率系数调整等领域。
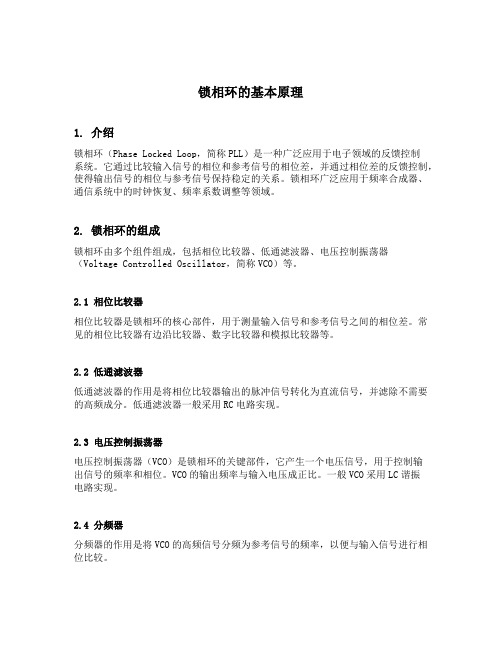
2. 锁相环的组成锁相环由多个组件组成,包括相位比较器、低通滤波器、电压控制振荡器(Voltage Controlled Oscillator,简称VCO)等。
2.1 相位比较器相位比较器是锁相环的核心部件,用于测量输入信号和参考信号之间的相位差。
常见的相位比较器有边沿比较器、数字比较器和模拟比较器等。
2.2 低通滤波器低通滤波器的作用是将相位比较器输出的脉冲信号转化为直流信号,并滤除不需要的高频成分。
低通滤波器一般采用RC电路实现。
2.3 电压控制振荡器电压控制振荡器(VCO)是锁相环的关键部件,它产生一个电压信号,用于控制输出信号的频率和相位。
VCO的输出频率与输入电压成正比。
一般VCO采用LC谐振电路实现。
2.4 分频器分频器的作用是将VCO的高频信号分频为参考信号的频率,以便与输入信号进行相位比较。
2.5 反馈环反馈环将VCO的输出信号与输入信号进行相位比较,并通过控制电压调整VCO的输出频率和相位。
同时,由于VCO输出信号被分频,所以经过一段时间后,输出信号的相位将与参考信号保持一致。
3. 锁相环的工作原理锁相环按照以下步骤工作:3.1 初始状态锁相环初始状态下,VCO的频率与输入信号的频率存在较大的差异,相位比较器输出的误差信号较大。
3.2 相位比较相位比较器对输入信号和参考信号进行相位比较,得到误差信号,误差信号的幅度与输入信号和参考信号之间的相位差有关。
3.3 误差信号滤波误差信号经过低通滤波器滤除高频成分,得到一个平滑的直流信号。
3.4 控制电压调整滤波后的误差信号作为控制电压,调整VCO的频率和相位。
模拟电子技术基础 7.3锁相环路(PLL)PPT课件

LF
VCO
输入调频信号
输出解调信号
uC(t)
捕捉带 > 输入调频信号的最大频偏
环路带宽>输入调频信号中调制信号的频谱பைடு நூலகம்度
为实现不失真解调,要求:
2. 调幅波的同步检波
乘积型同步检波框图
AMXY
LPF
uO(t)
ur(t)
us(t)
同步信号利用PLL提取
2. 调幅波的同步检波
PDⅡ的输入信号只在上升沿起作用,故该PD能处理非常窄的脉冲。
工作波形
VCO输入
VDD
PDⅡ输出
u14
u3
u13
锁定指示:锁定时高电平 失锁时低电平
u1
u9
PDⅡ称为鉴频鉴相器,因为:
o
uD(t)
PLL基本方程 的含义?
PLL基本方程 的含义?
7.3 锁相环路
可以锁定相位,可以消除频率误差,实现频率的无误差跟踪
主要要求:
掌握PLL的基本组成、工作原理和锁定的概念。
了解PLL的相位模型和基本方程。
了解PLL的捕捉与跟踪。
7.3 锁相环路
了解集成PLL和PLL的应用。
7.3.1 锁相环路基本原理
一、 锁相环路基本组成
鉴相器(PD):用以比较ui、 uo相位, 输出反映相位误差 的电压uD(t)
CMOS锁相环路CD4046简介
为数字PLL。内有两个PD、VCO、缓冲放大器、输入信号放大与整形电路、内部稳压器等。
具有电源电压范围宽(5~15V)、功耗低、输入阻抗高等优点。工作频率0~1MHz
内部VCO产生50%占空比的方波。输出电平可与TTL电平或CMOS电平兼容。
解调电压输出
锁相环工作原理
锁相环工作原理锁相环(Phase-Locked Loop,简称PLL)是一种常用的电子电路,用于在信号处理和通信系统中实现频率合成、时钟恢复、频率解调等功能。
它可以通过自动调整输出信号的相位和频率,使其与输入信号保持稳定的相位关系。
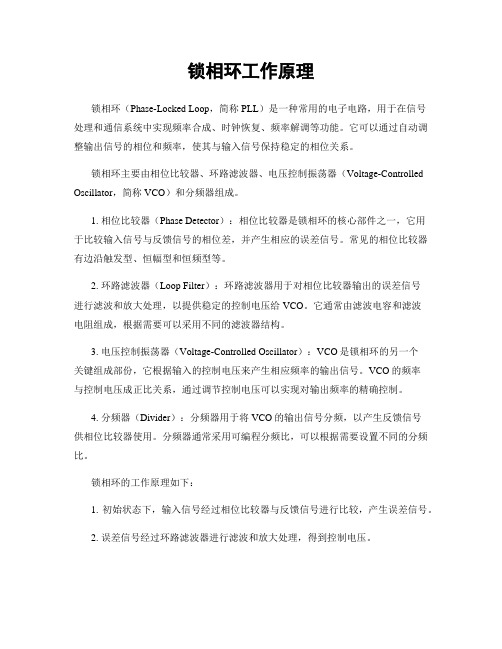
锁相环主要由相位比较器、环路滤波器、电压控制振荡器(Voltage-Controlled Oscillator,简称VCO)和分频器组成。
1. 相位比较器(Phase Detector):相位比较器是锁相环的核心部件之一,它用于比较输入信号与反馈信号的相位差,并产生相应的误差信号。
常见的相位比较器有边沿触发型、恒幅型和恒频型等。
2. 环路滤波器(Loop Filter):环路滤波器用于对相位比较器输出的误差信号进行滤波和放大处理,以提供稳定的控制电压给VCO。
它通常由滤波电容和滤波电阻组成,根据需要可以采用不同的滤波器结构。
3. 电压控制振荡器(Voltage-Controlled Oscillator):VCO是锁相环的另一个关键组成部份,它根据输入的控制电压来产生相应频率的输出信号。
VCO的频率与控制电压成正比关系,通过调节控制电压可以实现对输出频率的精确控制。
4. 分频器(Divider):分频器用于将VCO的输出信号分频,以产生反馈信号供相位比较器使用。
分频器通常采用可编程分频比,可以根据需要设置不同的分频比。
锁相环的工作原理如下:1. 初始状态下,输入信号经过相位比较器与反馈信号进行比较,产生误差信号。
2. 误差信号经过环路滤波器进行滤波和放大处理,得到控制电压。
3. 控制电压作用于VCO,调节VCO的频率,使其与输入信号保持稳定的相位关系。
4. VCO的输出信号经过分频器分频后,形成反馈信号,与输入信号进行比较,闭环控制。
5. 通过不断调节VCO的频率,使得输入信号与反馈信号的相位差趋近于零,锁定相位关系。
6. 一旦锁定相位关系后,VCO的输出信号就可以作为同步信号或者频率合成信号使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.锁相环的基本原理和模型在并网逆变器系统中,控制器的信号需要与电网电压的信号同步,锁相环通过检测电网电压相位与输出信号相位之差,并形成反馈控制系统来消除误差,达到跟踪电网电压相位和频率的目的。
一个基本的锁相环结构如图1-1所示,主要包括鉴相器,环路滤波器,压控振荡器三个部分。
图1-1 基本锁相环结构鉴相器的主要功能是实现锁相环输出与输入的相位差检测;环路滤波器的主要作用应该是建立输入与输出的动态响应特性,滤波作用是其次;压控振荡器所产生的所需要频率和相位信息。
PLL 的每个部分都是非线性的,但是这样不便于分析设计。
因此可以用近似的线性特性来表示PLL 的控制模型。
鉴相器传递函数为:)(Xo Xi Kd Vd -=压控振荡器可以等效为一个积分环节,因此其传递函数为:SKo 由于可以采用各种类型不同的滤波器(下文将会讲述),这里仅用)(s F 来表示滤波器的传递函数。
综合以上各个传递函数,我们可以得到,PLL 的开环传递函数,闭环传递函数和误差传递函数分别如下:Ss F K K s G d o op )()(=,)()()(s F K K S s F K K s G d o d o cl +=,)()(s F K K S S s H d o += 上述基本的传递函数就是PLL 设计和分析的基础。
2.鉴相器的实现方法鉴相器的目的是要尽可能的得到准确的相位误差信息。
可以使用线电压的过零检测实现,但是由于在电压畸变的情况下,相位信息可能受到严重影响,因此需要进行额外的信号处理,同时要检测出相位信息,至少需要一个周波的时间,动态响应性能可能受到影响。
一般也可以使用乘法鉴相器。
通过将压控振荡器的输出与输入相乘,并经过一定的处理得到相位误差信息。
在实际的并网逆变器应用中还可以在在同步旋转坐标系下进行设计,其基本的目的也是要得的相差的数值。
同步旋转坐标系下的控制框图和上图类似,在实际使用中,由于pq 理论在电网电压不平衡或者发生畸变使得性能较差,因而较多的使用dq 变换,将采样得到的三相交流电压信号进行变化后与给定的直流参考电压进行比较。
上述两种方法都使用了近似,利用在小角度时正弦函数值约等于其角度,因而会带来误差,这个误差是人为近似导致的误差,与我们要得到的相位误差不是一个概念,最终的我们得到相位误差是要形成压控振荡器的输入信号,在次激励下获得我们所需要的频率和相位信息。
2.1乘法鉴相器乘法鉴相器是一种较为普遍的传统检相方法,其原理是基于以下数学表达式:[])()(21)(*)(B A Sin B A Sin B Sin A Sin -++= 一般的可以假设PLL 的输入信号))((t t w Sin Xi i i θ+=,输出信号为))((t t w Sin Xo o o θ+=。
那么根据上述等式可以得到:))()()((21))()((21))(())((t o t i t w w Sin t o t i t w t w Sin t t w Sin t t w Sin o i o i o o i i θθθθθθ-+-++++=+*+ 这个式子包括两个部分,左边部分是一个近似两倍基频的波分分量,由于经过负反馈调节后,频率相差不大,因此右边部分可以近似认为是一个低频或者直流分量,即可以近似认为PLL 输入与输出相乘以后得到的结果是:))()((21t o t i Sin θθ-,更进一步的,对于较小的相角差值,我们可以近似认为:)())()((21))()((21t t o t i t o t i Sin δθθθθθ=-=-,从而得到相角差。
那么要想只得到右边的直流分量,可以做个很简单的处理,将两倍基频分量用低通滤波器滤除即可。
其控制框图如图2所示:图2 乘法鉴相器2.2同步旋转坐标系下相位检测同步旋转坐标变化下三相PLL 系统的控制框图如图3所示。
图3 三相PLL 系统基本框图abc 坐标系下的系统三相电压采样值经过dq 变换后转化为同步旋转坐标下的直流电压分量d U 和q U ,相角*θ可以经过*w 积分得到,环路滤波器的作用是来获得所需要的*w 。
设系统三相电压采样值为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡)32cos()32cos(cos πθπθθU U U U U U sc sb sa 变换矩阵为:⎥⎦⎤⎢⎣⎡-⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=****θθθθcos sin sin cos 232302121132C 因此有⎥⎦⎤⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡**)cos()sin(θθθθU U U U U C U U sc sb sa q d ,要使得系统电压相角θ与PLL 输出相角*θ相等,即相角误差为零,实现完全跟踪,那么就有d U 为零,如果将参考电压dref U 设置为零,则可以锁定电压相角。
同样的,在相角误差很小的情况下,我们有近似关系**-≈-θθθθ)sin(,所以可得简化的模型,其控制框图如图4:图4 三相PLL 系统简化控制框图按照上面的分析,上图中的正弦环节可以省略。
3.滤波器的选择滤波器是锁相环的核心部分,其性能直接决定了环路滤波器的性能。
不同的环路滤波器,控制模型有不同的传递函数,具体来说就是传递函数的阶数与类型的不同,从而导致设计方法上的差异与跟踪性能不同,重点设计部分应该是环路滤波器种类的选取和参数的设计。
滤波器有很多,但是我们要注意,应该保证最终的系统闭环传递函数的阶数在三阶以下,最常用的是二阶,即使是高阶也经常近似简化为二阶来进行设计,三阶以上的系统因为设计困难而很少使用。
当我们确定了环路滤波器的类型和参数后,并用BODE 图分析其频率响应,验证其控制性能,例如普遍使用的表征控制器性能的参数:带宽,截止频率,阻尼系数等等,可以参考各种控制参数调节方法反复进行参数的调试以获得最佳的性能。
滤波器设计应该是响应时间与跟踪精度的折中,对于高精度场合,可以让响应时间稍微长一些以获得较高的跟踪精度。
对于需要实时控制的场合,可以增大其带宽来获得较快的响应时间。
在不同的阻尼比,带宽,自然频率值下,超调量,响应时间,跟踪误差都各不相同,对于参数的选取很重要。
一般来说平衡无畸变的三相系统中,参数相对好设计一些。
在各种非理想和故障状态下的参数调节则依据具体情况,和所希望获得的性能而决定。
3.不同类型的滤波器及PLL 闭环频率响应分析3.1理想二阶环节(相当于一个PI 环节) 理想二阶环节的传递函数可表示为:S K K s s i p +=+121ττ,PI 控制器相当于增加了一个位于原点的开环极点,同时也增加了一个位于S 左半平面的开环零点。
极点提高系统型别,减小了稳态误差。
增加的开环零点减小系统阻尼,缓和PI 控制器对系统稳定性及动态过程产生的不利影响。
其频率响应如图6所示图6 理想二阶环节频率响应由此可以写出PLL 系统的开环和闭环传递函数分别是:)()(S K K S U s G i p op +*=ip i p op op cl UK S UK S UK S UK s G s G s G +++=+=2)(1)()( 将上述闭环传递函数写成二阶传递函数的标准形式:22222n n n n w S w S w S w +++εε,其中i n UK w =,ip K U K 2=ε。
设V U 3112220=*=。
对于典型的二阶系统,要取得较优的性能,可以取ε=0.707。
有文献用n w 来衡量控制系统的带宽,对于二阶系统,这个是可取的。
现在取不同的n w (取n w 分别为100,200,300,400,500),观察二阶系统的频率响应特性,如图5。
图7 不同自然频率情况下系统频率响应特性曲线具有高频衰减特性,即低通特性。
在不同的自然频率下,幅值裕量为无穷大,相角裕量都为127°,但是具有不同的谐振峰值和谐振频率,不同的穿越频率,同时在穿越频率处(幅值裕度为零的频率点),相位滞后都小于180°,系统是稳定的。
3.2无源比例积分滤波器 无源比例积分滤波器的传递函数可表示为:S S 1211ττ++(21ττ>)。
这实际上是一个超前滞后滤波器,将传递函数变形可以得到)1111(111121212τττττττ+-+=++S S S ,与前述的PI 环节相比,在11τ较小的情况下,我们可以近似认为它是一个不完美的积分器,实际的完美积分器不容易实现,在很多情况下,可以用上面的低通滤波器来代替。
其频率响应如图8所示图8 无源比例积分滤波器频率响应PLL 系统的开环和闭环传递函数如下:)1111()(11212τττττ+-+*=S S U s G op 11221121)(1)()(ττττττUS U S U S U s G s G s G op op cl ++++=+= 3.3 RC 积分滤波器RC 积分滤波器的传递函数为Sτ+11,它就是一个低通滤波器。
给原系统增加了一个负实零点。
其频率响应如图7所示图7 RC 积分滤波器的频率响应PLL 系统的开环和闭环传递函数分别为:SS U s G op τ+*=11)(••••••••••U S S U ••s G s G s G op op cl τττ++=+=2)(1)()( 实际使用的上述滤波器都是一阶滤波器,因此最终的都的PLL 系统闭环传递函数都是二阶系统。
但是也有高阶情况的,有文献中使用了二阶butterworth 滤波器,其传递函数为:20220)(n w S w S w s H ++= 那么最终得到的PLL 系统将会是三阶系统。
由于上述系统都是二阶的,因此都可以用类似的方法的进行设计,根据实际情况所需要的性能来合理的选择参数。
以PI 环节为例,在matlab 中搭建仿真电路,仿真条件设置为:三相平衡电压源,频率为50HZ ,相电压参数为500V ,在ε=0.707,n w =100的情况下,可以得到PI 参数分别为:Kp=14,Ki=69306。
仿真电路如图8:图8 三相平衡条件下PLL 仿真图输出波形如图9: 00.010.020.030.040.050.06-1-0.50.51图 9(a )PLL 输出(wt cos )图9(b ) PLL 输出(wt )图9(c)q轴电压波形由上图可以看出,在三相平衡情况下,PLL输出能很好的跟踪电网电压频率和相位,并且波形没有畸变,大概半个周波的时间就能实现准确跟踪。