锁相环基本原理及其应用
什么是电子电路中的锁相环及其应用
什么是电子电路中的锁相环及其应用电子电路中的锁相环(Phase-Locked Loop,简称PLL)是一种广泛应用的反馈控制电路,用于将输入信号的相位与频率与参考信号的相位与频率同步,从而实现信号的稳定性和精确性。
锁相环在通信、计算机、音频处理等领域都有重要的应用。
一、锁相环的工作原理锁相环主要由相位比较器(Phase Detector)、环形数字控制振荡器(VCO)和低通滤波器(LPF)组成。
相位比较器用来比较输入信号和参考信号的相位差,输出一个宽度等于相位差的脉冲信号。
VCO根据相位比较器输出的脉冲信号的宽度和方向来调节输出频率,使其与参考信号的频率和相位同步。
LPF用来滤除VCO输出信号中的高频成分,保证输出的稳定性。
二、锁相环的应用1. 通信领域:在数字通信系统中,锁相环被广泛应用于时钟恢复、时钟生成和时钟变换等方面。
通过锁相环可以实现对时钟信号的稳定传输,提高通信系统的可靠性和容错性。
2. 音频处理:在音频设备中,锁相环被用于时钟同步和抖动消除。
通过锁相环可以实现音频数据的同步传输和精确抖动控制,提高音质和信号稳定性。
3. 数字系统:在数字系统中,锁相环可用于时钟恢复、频率合成和位钟提取等方面。
通过锁相环可以实现对时钟信号的稳定提取和精确合成,确保系统的可靠运行。
4. 频率调制与解调:在调制与解调系统中,锁相环被应用于频偏补偿和相位同步。
通过锁相环可以实现对信号频偏和相位偏移的补偿,保证调制与解调的准确性和稳定性。
5. 频谱分析:锁相环还可以应用于频谱分析仪中,通过锁相环可以实现频率分析的准确性、稳定性和精确性。
三、锁相环的特点1. 稳定性:锁相环可以通过调整VCO的输出频率来实现输入信号和参考信号的同步,从而提高信号的稳定性。
2. 精确性:锁相环可以通过精确的相位比较和频率调节,实现对信号相位和频率的精确控制,提高信号处理的准确性。
3. 自适应性:锁相环可以根据输入信号和参考信号的变化自动调节,适应不同输入条件下的信号同步要求。
锁相环的原理

锁相环的原理
锁相环是一种广泛应用于电子技术中的控制系统,它的原理是通过对输入信号进行频率和相位的调整,使得输出信号与参考信号保持同步。
锁相环的应用范围非常广泛,包括通信、雷达、测量、控制等领域。
锁相环的基本原理是将输入信号与参考信号进行比较,然后通过反馈控制来调整输出信号的频率和相位,使得输出信号与参考信号保持同步。
锁相环通常由相位检测器、低通滤波器、控制电路和振荡器等组成。
相位检测器是锁相环的核心部件,它的作用是将输入信号与参考信号进行比较,然后输出一个误差信号。
误差信号经过低通滤波器后,就可以得到一个控制信号,用来调整振荡器的频率和相位。
当输出信号与参考信号同步时,误差信号为零,此时锁相环达到稳定状态。
锁相环的应用非常广泛,其中最常见的应用是在通信系统中。
在数字通信系统中,锁相环可以用来对接收信号进行时钟恢复,从而保证数据的正确接收。
在模拟通信系统中,锁相环可以用来对信号进行解调和调制,从而实现信号的传输和接收。
除了通信系统,锁相环还广泛应用于雷达、测量和控制等领域。
在雷达系统中,锁相环可以用来对回波信号进行相位测量,从而实现目标的距离和速度测量。
在测量系统中,锁相环可以用来对信号进
行频率测量和相位测量,从而实现高精度的测量。
在控制系统中,锁相环可以用来对控制信号进行同步,从而实现高精度的控制。
锁相环是一种非常重要的控制系统,它的应用范围非常广泛。
通过对输入信号进行频率和相位的调整,锁相环可以实现信号的同步和控制,从而实现高精度的测量和控制。
随着科技的不断发展,锁相环的应用将会越来越广泛,为人类的生产和生活带来更多的便利和效益。
锁相环的组成和原理及应用
锁相环的组成和原理及应用一.锁相环的基本组成许多电子设备要正常工作,通常需要外部的输入信号与内部的振荡信号同步,利用锁相环路就可以实现这个目的。
锁相环路是一种反馈控制电路,简称锁相环(PLL)。
锁相环的特点是:利用外部输入的参考信号控制环路内部振荡信号的频率和相位。
因锁相环可以实现输出信号频率对输入信号频率的自动跟踪,所以锁相环通常用于闭环跟踪电路。
锁相环在工作的过程中,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是锁相环名称的由来。
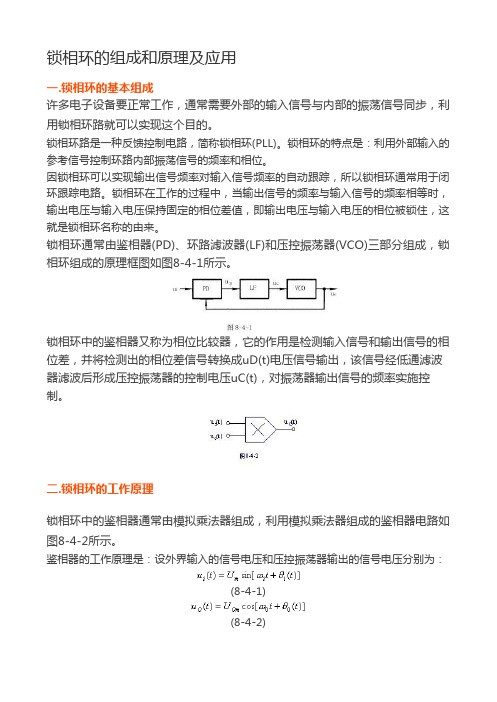
锁相环通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,锁相环组成的原理框图如图8-4-1所示。
锁相环中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成uD(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压uC(t),对振荡器输出信号的频率实施控制。
二.锁相环的工作原理锁相环中的鉴相器通常由模拟乘法器组成,利用模拟乘法器组成的鉴相器电路如图8-4-2所示。
鉴相器的工作原理是:设外界输入的信号电压和压控振荡器输出的信号电压分别为:(8-4-1)(8-4-2)式中的ω0为压控振荡器在输入控制电压为零或为直流电压时的振荡角频率,称为电路的固有振荡角频率。
则模拟乘法器的输出电压uD为:用低通滤波器LF将上式中的和频分量滤掉,剩下的差频分量作为压控振荡器的输入控制电压uC(t)。
即uC(t)为:(8-4-3)式中的ωi为输入信号的瞬时振荡角频率,θi(t)和θO(t)分别为输入信号和输出信号的瞬时位相,根据相量的关系可得瞬时频率和瞬时位相的关系为:即(8-4-4)则,瞬时相位差θd为(8-4-5)对两边求微分,可得频差的关系式为(8-4-6)上式等于零,说明锁相环进入相位锁定的状态,此时输出和输入信号的频率和相位保持恒定不变的状态,uc(t)为恒定值。
简述锁相环的基本的原理
锁相环的基本原理1. 介绍锁相环(Phase Locked Loop,简称PLL)是一种广泛应用于电子领域的反馈控制系统。
它通过比较输入信号的相位和参考信号的相位差,并通过相位差的反馈控制,使得输出信号的相位与参考信号保持稳定的关系。
锁相环广泛应用于频率合成器、通信系统中的时钟恢复、频率系数调整等领域。
2. 锁相环的组成锁相环由多个组件组成,包括相位比较器、低通滤波器、电压控制振荡器(Voltage Controlled Oscillator,简称VCO)等。
2.1 相位比较器相位比较器是锁相环的核心部件,用于测量输入信号和参考信号之间的相位差。
常见的相位比较器有边沿比较器、数字比较器和模拟比较器等。
2.2 低通滤波器低通滤波器的作用是将相位比较器输出的脉冲信号转化为直流信号,并滤除不需要的高频成分。
低通滤波器一般采用RC电路实现。
2.3 电压控制振荡器电压控制振荡器(VCO)是锁相环的关键部件,它产生一个电压信号,用于控制输出信号的频率和相位。
VCO的输出频率与输入电压成正比。
一般VCO采用LC谐振电路实现。
2.4 分频器分频器的作用是将VCO的高频信号分频为参考信号的频率,以便与输入信号进行相位比较。
2.5 反馈环反馈环将VCO的输出信号与输入信号进行相位比较,并通过控制电压调整VCO的输出频率和相位。
同时,由于VCO输出信号被分频,所以经过一段时间后,输出信号的相位将与参考信号保持一致。
3. 锁相环的工作原理锁相环按照以下步骤工作:3.1 初始状态锁相环初始状态下,VCO的频率与输入信号的频率存在较大的差异,相位比较器输出的误差信号较大。
3.2 相位比较相位比较器对输入信号和参考信号进行相位比较,得到误差信号,误差信号的幅度与输入信号和参考信号之间的相位差有关。
3.3 误差信号滤波误差信号经过低通滤波器滤除高频成分,得到一个平滑的直流信号。
3.4 控制电压调整滤波后的误差信号作为控制电压,调整VCO的频率和相位。
锁相环原理及应用

•
当N1栅极加上控制电压uc后,它 能改变流过P1,亦即流过P2中的电流,起 到uc控制充电电流的作用。分析可得
•
uc U TN ED U TP I0 R1 R2
(5-30)
式中UTN 和UTP 分别为N沟道和P 沟道场效应管的阈电压。将(5-30)式代入 (5-29)式,得到
uc U TN ED U TP I0 8R1CT 8R2CT
• • • • • • • • • • •
•
• •
•
Pin 3, 9 = VSS VDD = 5V 70 5 55 205 mA VDD = 10V 530 20 410 710 mA VDD = 15V 1500 50 1200 1800 mA VOL LOW Level Output Voltage VDD = 5V 0.05 0 0.05 0.05 V VDD = 10V 0.05 0 0.05 0.05 V VDD = 15V 0.05 0 0.05 0.05 V VOH HIGH Level Output Voltage VDD = 5V 4.95 4.95 5 4.95 V VDD = 10V 9.95 9.95 10 9.95 V VDD = 15V 14.95 14.95 15 14.95 V VIL LOW Level Input Voltage VDD = 5V, VO = 0.5V or 4.5V 1.5 2.25 1.5 1.5 V Comparator and Signal In VDD = 10V, VO = 1V or 9V 3.0 4.5 3.0 3.0 V VDD = 15V, VO = 1.5V or 13.5V 4.0 6.25 4.0 4.0 V VIH HIGH Level Input Voltage VDD = 5V, VO = 0.5V or 4.5V 3.5 3.5 2.75 3.5 V Comparator and Signal In VDD = 10V, VO = 1V or 9V 7.0 7.0 5.5 7.0 V
锁相环的基本原理锁相环基本原理及其应用
锁相环的基本原理锁相环基本原理及其应用锁相环的基本原理锁相环基本原理及其应用锁相环及其应用所谓锁相环路,实际是指自动相位控制电路(APC),它是利用两个电信号的相位误差,通过环路自身调整作用,实现频率准确跟踪的系统,称该系统为锁相环路,简称环路,通常用PLL表示。
锁相环路是由鉴相器(简称PD)、环路滤波器(简称LPF或LF)和压控振荡器(简称VCO)三个部件组成闭合系统。
这是一个基本环路,其各种形式均由它变化而来PLL概念设环路输入信号v= Viomimsin(ωit+φi)环路输出信号v= Vosin(ωot+φo)——其中ωo=ωr+△ωo通过相位反馈控制,最终使相位保持同步,实现了受控频率准确跟踪基准信号频率的自动控制系统称为锁相环路。
PLL构成由鉴相器(PD)环路滤波器(LPF)压控振荡器(VCO)组成的环路。
PLL原理从捕捉过程→锁定A.捕捉过程(是失锁的)a. b.φi┈φi均是随时间变化的,经相位比较产生误差相位φe=φi-φo,也是变化的。
φe(t)由鉴相器产生误差电压v(t)=f(φde)完成相位误差—电压的变换作用。
v(t)为交流电压。
dc.v(t)经环路滤波,滤除高频分量和干扰噪声得到纯净控制电压,由VCO产生d控制角频差△ω0,使ω0随ωi变化。
B.锁定(即相位稳定)a. b.一旦锁定φe(t)=φe∞(很小常数)v(t)= V(直流电压)ddω0≡ωi输出频率恒等于输入频率(无角频差,同时控制角频差为最大△ω0max, 即ω0=ωr+△ω0max。
ωr为VCO固有振荡角频率。
)锁相基本组成和基本方程(时域)各基本组成部件鉴相器(PD)数学模式v(t)=AsinφdDe(t)相位模式环路滤波器(LPF) 数学模式v(t)=A(P) v(t)cFd相位模式压控振荡器(VCO)数学模式相位模式环路模型相位模式:指锁相环(PLL)输入相位和输出相位的反馈调节关系。
相位模型:把鉴相器,环路滤波器和压控振荡器三个部件的相位模型依次级联起来就构成锁相相位模型。
锁相环的基本原理和应用讲解

6
123
2020/9/30
如果VCO 的频率在开始时低于输入参 考频率,相应比较器的输出偏正。此正输 出电压经滤波后加至VCO,强制VCO 的 频率增加,直至 VCO的频率和相应与输 人参考信号的频率与相应精确相同为止。
7
123
2020/9/30
如果VCO的频率增加到高于输入参考频 率,则发生与上述相反的过程。相应比较 器的输出减少,使VCO 的频率降低,以 锁定到与输入参考相同的频率上。
Fmin = 1 / R2( C1+32pf )
17
123
2020/9/30
键控移频 ( FSK )
VCC
R1
VCO VCC
9
4 Fo
5 00 K
8
(SET FREQ)
5
6 7 11
C1
R2
0 .1 U
1 00 K
U1
U2
NOT
R3 NOT
POT2
123
C2
CAP
fig2 FSK
18 2020/9/30
C2 5 10 0 p
123
OPAMP
10 Uo
Rl 1 0k
fig 2 F -- V
tl e
Size
N
A4 21
20DF2ialte0e::/9/30
15 E:
4. PLL锁相环电路分析
4.1 4046比较器I和II的特点
比较器I的特点是:两个输入信号的电平状态相 异时( 一个是高电平,一个是低电平),输山信号 V为高电平:反之为低电平。当两个输入信号的
误差
fo
低通滤波器
线性压控振荡器
计数器 10
锁相环的基本原理和应用
锁相环的基本原理和应用1. 什么是锁相环锁相环(Phase-Locked Loop,简称PLL)是一种电路模块,其基本原理是通过对输入信号和参考信号的相位进行比较和调节,以使输出信号与参考信号保持稳定的相位差。
锁相环广泛应用于通信、测量、频率合成等领域,因其能够实现信号调频、时钟控制等功能而备受关注。
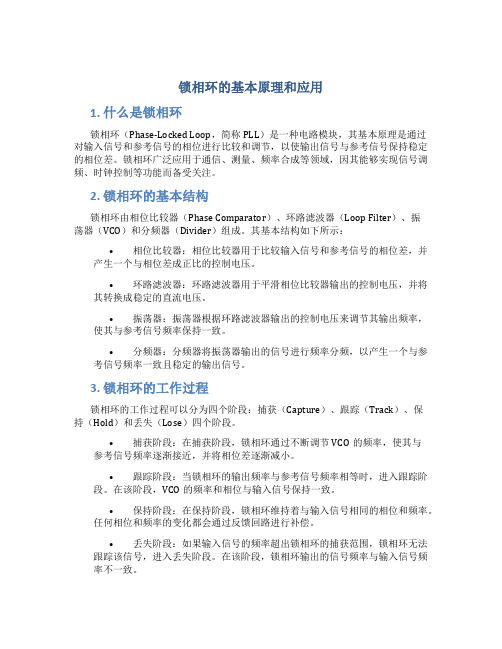
2. 锁相环的基本结构锁相环由相位比较器(Phase Comparator)、环路滤波器(Loop Filter)、振荡器(VCO)和分频器(Divider)组成。
其基本结构如下所示:•相位比较器:相位比较器用于比较输入信号和参考信号的相位差,并产生一个与相位差成正比的控制电压。
•环路滤波器:环路滤波器用于平滑相位比较器输出的控制电压,并将其转换成稳定的直流电压。
•振荡器:振荡器根据环路滤波器输出的控制电压来调节其输出频率,使其与参考信号频率保持一致。
•分频器:分频器将振荡器输出的信号进行频率分频,以产生一个与参考信号频率一致且稳定的输出信号。
3. 锁相环的工作过程锁相环的工作过程可以分为四个阶段:捕获(Capture)、跟踪(Track)、保持(Hold)和丢失(Lose)四个阶段。
•捕获阶段:在捕获阶段,锁相环通过不断调节VCO的频率,使其与参考信号频率逐渐接近,并将相位差逐渐减小。
•跟踪阶段:当锁相环的输出频率与参考信号频率相等时,进入跟踪阶段。
在该阶段,VCO的频率和相位与输入信号保持一致。
•保持阶段:在保持阶段,锁相环维持着与输入信号相同的相位和频率。
任何相位和频率的变化都会通过反馈回路进行补偿。
•丢失阶段:如果输入信号的频率超出锁相环的捕获范围,锁相环无法跟踪该信号,进入丢失阶段。
在该阶段,锁相环输出的信号频率与输入信号频率不一致。
4. 锁相环的应用锁相环在各个领域有着广泛的应用,下面列举几个常见的应用:•频率合成器:锁相环可以将稳定的参考频率合成为其他频率,广泛用于通信、雷达、测量等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
锁相环及其应用所谓锁相环路,实际是指自动相位控制电路(APC),它是利用两个电信号的相位误差,通过环路自身调整作用,实现频率准确跟踪的系统,称该系统为锁相环路,简称环路,通常用PLL表示。
称VCO )三个部件组成闭合系统。
这是一个基本环路,其各种形式均由它变化而来PLL概念设环路输入信号V i= V im Sin( 3 i t+ 0 i)环路输出信号V o= V om Sin( 3 o t+ 0 o) 其中 3 o = 3 r +△ 3 o率的自动控制系统称为锁相环路PLL构成由鉴相器(PD环路滤波器(LPF)压控振荡器(VCO组成的环路通过相位反馈控制, 最终使相位保持同步, 实现了受控频率准确跟踪基准信号频锁相环路是由鉴相器(简称PD)、环路滤波器(简称LPF或LF )和压控振荡器(简ejt 戶心(tAejt)谋差相檯PLL 原理从捕捉过程一锁定A.捕捉过程(是失锁的)0 i — 0 i 均是随时间变化的,经相位比较产生误差相位 0 e = 0 i - 0 o ,也是变化的。
b.0 e (t)由鉴相器产生误差电压V d(t)= f (0 e )完成相位误差一电压的变换作用。
V d(t)为交流电压。
C.V d(t)经环路滤波,滤除高频分量和干扰噪声得到纯净控制电压,由 VCO 产生控制角频差△ 3 0,使3 0随3i 变化。
B.锁定(即相位稳定)即 3 0= 3 r + △ 3 Omax 。
3 r 为VCO 固有振荡角频率。
)锁相基本组成和基本方程(时域)各基本组成部件鉴相器(PD)a. 一旦锁定0 e (t)= 0 e -(很小常数)V d(t)= V d(直流电压)b.3 0= 3 i 输出频率恒等于输入频率(无角频差,同时控制角频差为最大△3 Omax数学模式V d(t)=ADsin0 e (t)环路滤波器(LPF)数学模式V c(t)=A F(P) V d(t)相位模式 %⑷ -------- ► Ap(P 〕 --------------- v c M压控振荡器(VCO)环路模型相位模式:指锁相环(PLL)输入相位和输出相位的反馈调节关系。
相位模型:把鉴相器,环路滤波器和压控振荡器三个部件的相位模型依次级联起来就构成锁相相位模型。
■AoP相位模式数学模式%!相位模式锁相环路基本方程(动态方程)和物理意义方程:P0 e(t) = P 0 i (t)-A a AA(p)sin 0 e(t)P 0 e(t) = P 0 i (t)-A E(p)sin 0 e(t)方程特点:属非线性微分方程非线性由鉴相器决定求解微分方程,可确定环路的性能方程物理意义:它是描述输入信号和压控振荡器输出信号之间的相位误差0 e(t),从环路闭合的一瞬间开始,0 e(t)随着时间t变化的过程。
各项物理意义:P0 e(t)表示环路瞬时角频差厶3 = 3 i- 3。
P0i(t)表示环路的固有角频差(或起始角频差)△3 i= 3 i - 3 rA O AA F(P)S in 0 e(t)表示环路控制角频差△ 3 0= 3。
- 3 r环路动态过程表明:△3i=^3 ;+△ 3 o f当△ 3JJ =0时,3 i = 3 o环路锁定。
锁定时1 Q £A 3 .= arcsrn —(卜⑺:A z)※补充二、复频域锁相基本方程和相位模型(复频域).买収⑴玉壬sin収(t) «収⑴ 0 o线性化条件:环路线性化环路方程:P© e(t) = P (|)i(t)-A 刀F(P)© e(t)为线性微分方程。
复频域相位模式:S© e(S)=S © i(S)-A 刀F(S) © e(t)© e(S), © i(S)为© e(t), ©i(t)的拉氏变换F(S)是环路滤波器的传递函数。
环路传递函数线性系统传递函数的定义:当初始条件为零时,响应函数的拉氏变换与驱动函数的拉氏变换之比环路传递函数:开环传递函数H(s)当环路反馈支路开路状态下,由输入相位驱动所引起输出相位的响应。
为:F(S)也(S)闭环传递函数H(s)研究环路闭环状态下,由输入相位© i(S)驱动所引起输出相位© o(S)的响应。
为:<b p(S)_ A£F(S) 屯(S) S + AF(S)误差传递函数H e(s)H(S) =复频域环路线性化环路方程研究闭环状态下,由输入相位驱动,误差相位的响应。
为H O (s),H(s),H e (s)是研究锁相环路跟踪(或同步)状态最常用的三个传 递函数,三者之间的关系为:是工程中常用,应熟记F(S)是环路滤波器的传递函数。
不同的环路,采取的环路滤波器不同, 即F(S)不同,代入环路传递函数中即可得到不同环路的三种不同传递函 数。
为了引入环路参量 3 n —环路固有角频率z ——环路阻尼系数可描述环路的动态过程(其中3 n , Z 均可用A,A D 及时间常数T 或 T 1, T 2表示,但各环路系统的 3 n, Z 是不同的)。
分母标准化环路传递函数表示如下:H 0(S)“ UH o (S)H p (S) = -----------八 UH O (S)二阶1型环就税分谑波器〕二断1型环皿比例称分谑被第)二阶空型环甫源BC出例狗分濡波12 Ao A D 1 1 、2 T「+q A I A D-严山心八1气A O A D^A O A D^T I呂峡沁JA遇)+哎S(&-2診上+號L + 2S2恥)S2 4 2§叫S S2 +S<^/A LO A D 計十2迪+毬s as2 + 2 gs 十 3:S a+ 2 叫已+ ©;KS)S3 + 2 ^n S 十试他A D:十冬2阿£ + a:S a + 2 ^o n S +备注yRC E 二R^C \ 二屯亡片二R££二巴0锁相环路的工作状态、锁定状态锁定工作状态现象的观察(实验)先调fi二珀锁定状态改变VCO振荡回路电容珂,但数字频率计读数f不变(说明f rf o K 在改变弓使坯变化时,发现直流电压表谏数也有所变化。
这说明直流电压表电压谏数变化,使锁相环能提供一个反向漂移频率来补偿压控振荡频率的变化量,从而使被锁定在叫上。
锁定状态涵义:它是指环路基准输入信号的频率和相位与压控振荡器输出信号的频率和相位相等,则鉴相器输出电压V d(t)为一直流电压,其大小使压控振荡器频率保持着和基准输入信号频率相等。
锁定充分必要条件说明:假设基准输入信号频率和初相位是不变。
开环时3i工® r,存在固有角频差A^i,当环路闭合后,通过环路的调节作用,使▼。
尸生一个控制频差A 3 o= CO o- CO r,在锁定时,任何时刻 A 3i = A 3。
锁定条件:O i = O 0 e(t)= ©、跟踪状态跟踪工作状态现象的观察用信号发生器代替基准输入信号f i,当改变f i频率,在一定范围内变化时,观察发现VCO的频率f o将随着信号发生器的频率作线性变化。
在环路锁定情况下二个频率计的频率读数始终是相等的。
上述调珥过程,观察到直流电压表上的读数是变化的。
这说明这电压变化去控制压控振荡器频率坯才使之跟随信号发生器冇频率的变化”跟踪过程可表示为:3 i © i © e ff V d ff V C ffC j o o f同样跟踪过程也是锁定的一种形式:3 o ff © o ff © e jf V d jf V C jfC j ff 3 o Jf © o j可见锁相环是一个相位反馈系统,环路锁定没有频差,但仍然存在相位误差© e,否则不可能再控制频率变化了。
同步带:指环路本身是失锁状态,使环路能保持跟踪和同步的最大固有角频差A 3 imax= A 3 H称为环路的同步带。
三、失锁状态失锁涵义:表示环路既不锁定,也不跟踪,环路所处的工作状态。
失锁通过环路调节作用可能有两种不同结果:其一:可能使环路无法再锁定。
其二:可能使环路再锁定。
(这是通常失锁状态总是指这种情况)环路从失锁到环路再次锁定的过程称为捕捉过程。
捕捉过程包含两个阶段,一是频率牵引阶段(或称频率捕捉过程);一是相位牵引阶段(或称相位捕捉过程)。
捕捉过程鉴相器输出电压V d(t)呈现波形就不再是正弦波,而是频率捕捉过程是由于0 e(t)产生2 n周期跳跃,产生上下不对称的差拍波,产生一个直流分量,随差拍波的周期愈来愈长,使这直流分量值也愈来愈大,这直流的增长过程,就是环路滤波器的积分过程,将VCO的频率从3i牵引3 r,完成频率牵引过程。
相位捕捉过程是使VCO频率已接近了3i,认为只进行相位的调整,这过程已不再发生2n周期的跳跃,所以是快捕入锁的过程。
使V d经过环路滤波器后产生V c0 e(t)趋于稳态的相位差0 e x,由于信号,控制VCO才能保持3 i = 3 o ,若无0 e a存在,环路也无法锁定。
环路锁定后,若输入信号是随时间发生变化,加至鉴相器后,通过环路调节作用,使压控振荡器的频率也不断地跟随输入信号频率和相位而变,只要满足 3 i — 3 o=( 3 i- 3 r)-( 3。
- 3 r),这时环路工作状态就是跟踪(或同步)状态。
※补充环路频响特性“频率特性”是对输入信号的相位频谱而言输入信号V i(t)=V m sin[ 3 c(t) + msin( Q t +© J]输入相位© i(t)=m i sin( Q t + © i)输出相位© o(t)=m o sin( Q t + ©。
)误差相位© e(t)=msin( Q t + © e)将环路传递函数中S,令S=j Q即分别得到不同环路闭环频率响应和误差的频率响应。
一阶环|H(jQ)|〜蒼|比(血)|〜寻I n呈低通滤械呈高通龍破截止角频率a二虹提高环路抗干扰与噪声应取Q "(BPA E。
愈好I二者矛韬,性能差. 提高环路橹定性能应取血卞即阳:$愈好J无实用价值.二阶环(以理想二阶环为例)• J 监均与躲山氏有关朋差频响特性©相频特性• X%曾G )很/卜 %⑴懸購%⑷变化结论 无论何种滤波器的二阶环其闭环频响特性应都具有低通性质,误差频响特性都 具有高通• G <叽环路有窗的传递相位闿-环路雌状态•昧(t )SJ 麻瞻如t )变化• 0尸[(1十2学)+』+(1十2护〕『气女闭环烦响特性e 幅烦特性O 幅頻特性HQ 〜§■呈高通磁状态%(c ) a性质。
这两种响应在环路应用中有极重要的作用。