如何计算远心镜头的匹配精度
镜头计算方法及相关术语
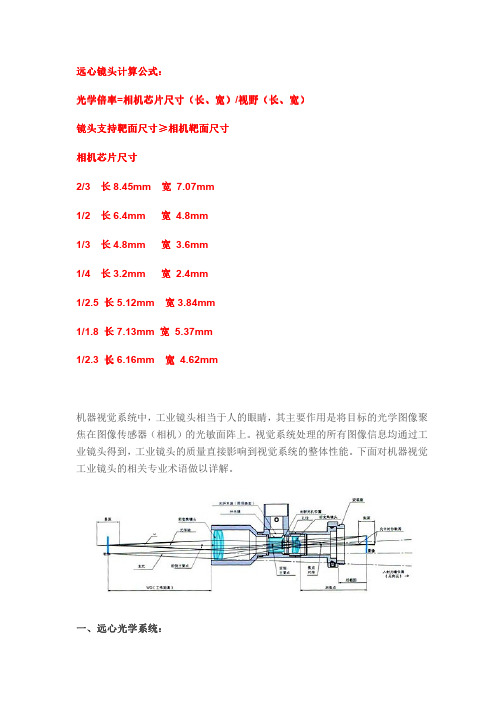
远心镜头计算公式远心镜头计算公式::光学倍率=相机芯片尺寸相机芯片尺寸((长、宽)/视野视野((长、宽)镜头支持靶面镜头支持靶面尺寸尺寸尺寸≥≥相机靶面尺寸相机芯片尺寸2/3 长8.45mm 宽 7.07mm1/2 长6.4mm 宽 4.8mm1/3 长4.8mm 宽 3.6mm1/4 长3.2mm 宽 2.4mm1/2.5 长5.12mm 宽3.84mm1/1.8 长7.13mm 宽 5.37mm1/2.3 长6.16mm 宽 4.62mm机器视觉系统中,工业镜头相当于人的眼睛,其主要作用是将目标的光学图像聚焦在图像传感器(相机)的光敏面阵上。
视觉系统处理的所有图像信息均通过工业镜头得到,工业镜头的质量直接影响到视觉系统的整体性能。
下面对机器视觉工业镜头的相关专业术语做以详解。
一、远心光学系统远心光学系统::指主光线平行于工业镜头光学轴的光学系统。
而光从物体朝向镜头发出,与光学轴保持平行,甚至在轴外同样如此,则称为物体侧远心光学系统。
:二、远心镜头远心镜头:远心镜头指主光线与镜头光源平行的工业镜头。
有物方远心,像方远心,双侧远心。
普通工业镜头主光线与镜头光轴有角度,因此工件上下移动时,像的大小有变化。
双侧远心境头主物方,像方均为主光线与光轴平行光圈可变,可以得到高的景深,比物方远心境头更能得到稳定的像最适合于测量用图像处理光学系统,但是大型化成本高物方远心境头只是物方主光线与镜头主轴平行工件上下变化,图像的大小基本不会变化使用同轴落射照明时的必要条件,小型化亦可对应像方远心境头只是像方主光线与镜头光轴平行相机侧即使有安装个体差,也可以吸收摄影倍率的变化用于色偏移补偿,摄像机本应都采用这种镜头三、远心光学系统的特色远心光学系统的特色::优点优点::更小的尺寸。
减少镜头数量,可降低成本。
缺点缺点::上下移动物体表面时,会改变物体尺寸或位置。
优点优点::上下移动物体表面时,不会改变物体尺寸或位置。
使用同轴照明时。
一种远心镜头的标定方法及精度研究

一种远心镜头的标定方法及精度研究
一、远心镜头简介
远心镜头是一种特殊类型的光学镜头,具有成像清晰、像差较小等特点。
在工业测量、机器视觉等领域具有广泛的应用。
远心镜头的标定和精度研究对于提高测量准确性和应用效果具有重要意义。
二、远心镜头的标定方法
1.标定原理
远心镜头的标定是基于成像几何模型进行的。
通过对镜头成像过程中的物距、像距、像高等进行测量,结合成像模型,求解出镜头的成像参数,从而实现标定。
2.标定步骤
(1)准备标定物体和标定模板。
(2)调整远心镜头,使标定物体成像在摄像机传感器上。
(3)采集多幅不同位置的标定图像。
(4)基于成像几何模型,利用标定图像求解镜头参数。
(5)迭代优化求解过程,得到精确的标定结果。
3.标定数据处理与分析
对采集到的标定图像进行处理,计算物距、像距、像高等信息。
结合成像模型,求解出镜头的成像参数。
对求解结果进行误差分析,评估标定的准确性。
三、远心镜头的精度研究
1.精度评价指标
评价远心镜头的精度,主要考虑以下指标:成像清晰度、像差、测量误差等。
2.实验数据分析
通过对标定后的远心镜头进行实际测量,收集数据并分析,评估镜头的精度性能。
3.精度优化方法探讨
(1)优化标定过程,提高标定数据的准确性。
(2)调整镜头参数,降低像差和成像畸变。
(3)采用更先进的图像处理算法,提高测量精度。
四、结论与展望
本文对远心镜头的标定方法及精度进行了研究。
通过对标定原理和步骤的详细阐述,为实际应用中提高远心镜头的精度提供了理论依据。
如何计算远心镜头的匹配精度

如何计算远心镜头的匹配精度很多机器视觉项目工程师在做视觉项目评估时都会涉及到硬件匹配选型的精度计算。
大部分工程师都很清楚相机的分辨率和精度的关系,但是涉及到如何匹配镜头才能使得相机分辨率不浪费,这里面就需要了解一下关于镜头匹配精度的细节问题,下面BTOS就介绍一下这方面的知识。
首先介绍几个涉及到镜头精度的概念:数值孔径NA和F#它们都是描述单位点被光学系统采集到的光能量的量化指标NA一般针对放大倍率大于1倍及其以上的光学系统,常用于显微镜F#一般用于放大倍率小于1倍的光学系统,定焦、远心、变焦等NA越大,镜头成像越亮,NA和F#的关系如下:F#=1/2NA相机的精度—分辨率(像元)镜头的精度—分辨率(艾利斑)物方的每个点经过光学系统到像方都会形成一个同心圆环组成的艾利斑物方两个点无限靠近时,像方的艾利斑会叠加,当像方艾利斑中心间隔小到0.61λ/NA{1.22λ(F#)}时达到分辨极限(设计时的理论极限)红外IR——紫外UV(衍射极限随着波长的减小在变大)极限频率=2NA/λλ为中心波长从以上可以看出,镜头的分辨率和工作波段、光圈大小有着紧密的关系。
那么,如何通过计算镜头和相机匹配的精度呢?首先要介绍关于MTF和CTF的概念:MTF光学传递函数》CTF光学调制函数MTF和CTF是镜头分辨率的另一种直观体现形式。
一个黑白相间的条纹称为一个线对一个光学系统能够清晰分辨最细的一组图案(线对条纹)被认为是系统的分辨极限,表示为每毫米的线条数镜头和相机是如何匹配的呢?镜头和相机的靶面匹配:镜头的成像圆直径=相机芯片对角线尺寸镜头的成像圆直径<相机芯片对角线尺寸(黑角)镜头的成像圆直径>相机芯片对角线尺寸(镜头倍率浪费)镜头设计中心弥散圆直径相机像元尺寸以相机像元尺寸做为整个成像系统的像方分辨精度,通过倍率换算得到物方分辨精度。
光学倍率=h/H或v/V光学倍率=像方分辨率/物方分辨率相机的极限分辨率(线对)=1/2*像元尺寸比如EM510相机2456*2058像元尺寸3.45μm相机的极限分辨率(线对)=1/2*0.00345=144.93lp/mm相机的靶面h=2456*0.00345=8.4mmv=2058*0.00345=7.1mmEM510匹配BT2336BT2336的倍率为0.243X整体精度为:相机的极限分辨率(线对)*镜头倍率144.93*0.243=35.217lp/mm1/线对*2=精度(mm)1/35.217*2=0.014mmEM510匹配BT2336的精度即0.014mm以上只是给大家简单介绍了一下镜头关于精度的一些概念,镜头和相机的匹配需要考虑的问题还很多,我们会在以后的技术文章里来做说明。
一种影像测量仪的远心镜头远心度调试方法

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号CN110849266A(43)申请公布日 2020.02.28(21)申请号CN201911189269.8(22)申请日2019.11.28(71)申请人江西瑞普德测量设备有限公司地址330400 江西省九江市德安县宝塔工业园(72)发明人叶向阳;周自吉;宋杰;刘凯(74)专利代理机构南昌赣专知识产权代理有限公司代理人钟隆辉(51)Int.CI权利要求说明书说明书幅图(54)发明名称一种影像测量仪的远心镜头远心度调试方法(57)摘要本发明公开了一种影像测量仪的远心镜头远心度调试方法,属于影像测量仪调试技术领域,影像测量仪的远心镜头远心度调试方法包括步骤:在工作台上设置标定板;使远心镜头对焦至标定板,选取若干个标定参照;在远心镜头的景深范围内测量至少两次的若干个标定参照的长度,获得至少两组的若干个测量值;分别比较每一标定参照的至少两个的测量值,若每一标定参照的任意两测量值之差的绝对值均小于D,则认定调试完成;否则,调整远心镜头的远心度,重复以上步骤,直至认定调试完成。
本发明公开的影像测量仪的远心镜头远心度调试方法,可实现对远心镜头的远心度进行调试,提高其在景深范围内对同一物体测量的尺寸一致性。
法律状态法律状态公告日法律状态信息法律状态2020-02-28公开公开2020-02-28公开公开2020-03-24实质审查的生效实质审查的生效权利要求说明书一种影像测量仪的远心镜头远心度调试方法的权利要求说明书内容是....请下载后查看说明书一种影像测量仪的远心镜头远心度调试方法的说明书内容是....请下载后查看。
华周测控带您了解机器视觉远心镜头的常见技术参数介绍

华周测控带您了解机器视觉远⼼镜头的常见技术参数介绍远⼼镜头是指物⽅、或像⽅主光线平⾏于光轴的镜头;只有物⽅主光线平⾏于光轴称为物⽅远⼼镜头;只有像⽅主光线平⾏于光轴称为像⽅远⼼镜头;物⽅主光线与像⽅主光线都平⾏于光轴的称为双远⼼镜头。
光轴:光轴是指通过镜头⾥⾯各镜⽚中⼼的⼀条轴线。
主光线:视野内任意⼀物点P发出的光,经过镜头光栏中⼼的⼀条光线,称为P点的主光线;每⼀个物点都有⾃⼰对应的主光线。
远⼼光路及⾮远⼼光路的特点物⽅远⼼:物⽅主光线是平⾏于光轴的,物⾯到镜头段的光路越⾛越宽;前后移动物体,只会使成像变模糊,但放⼤倍率保持不变,因此物体成像后⼤⼩也不发⽣改变;双远⼼:物⽅和像⽅的主光线都是平⾏光轴的,物⾯到镜头段的光路越⾛越宽;镜头到靶⾯段的光路越⾛越窄,前后移动物⾯或靶⾯,只会成像变模糊,但放⼤倍率保持不变,因此物体成像后⼤⼩也不发⽣改变;⾮远⼼:物光、像⽅主光线都是倾斜的;物⾯到镜头段光路越⾛越窄,前后移动物⾯或靶⾯,不但成像变模糊,⽽且放⼤倍率也会发⽣变化,因此物体成像后⼤⼩也发⽣改变;⼀、分辨率分辨率⼀、远⼼镜头的分辨率⼀般采⽤物⽅分辨率(单位µm),物⽅分辨率=像⽅分辨率/光学放⼤倍率⼆、景深(DOF)远⼼镜头的景深可以⽤以下的计算式计算出来:景深=2 x Permissible COC x 实效F / 光学倍率² = 允许误差值 / (NA x光学倍率)(使⽤的是0.04mm的Permissible COC)远⼼度⼆、远⼼度⼆、远⼼度描述了主光线偏离于光轴的⾓度。
⾓度越⼩远⼼度越好,像就越精确。
⽤来测量远⼼度的是远⼼靶板。
测试时,测试靶板与光轴成45°放置,这样靶板的底部与顶部距离镜头的远近不同。
当通过⼀个⾮远⼼镜头成像时,靶板底部所成的像尺⼨会⼩于顶部所成像的尺⼨,这就是梯形畸变。
⼀个完美的远⼼镜头没有梯形畸变,远⼼度是0°普通镜头例f=12mm,相机CCD为1/3″,观察距离S=200mm,⾼为H=20mm的物体。
远心镜头计算公式

远心镜头计算公式
在实际应用中,通常采用以下简化公式计算镜头远心度:
F = f × (S / (S + d))
其中,F 表示镜头远心度,f 表示镜头焦距,S 表示摄像机传感器的对角线长度,d
表示摄像机镜头到传感器的距离。
此外,根据薄透镜公式,可以得到以下关系式:
1/f = 1/v - 1/u
其中,焦距f 是镜头的一个关键参数,它决定了镜头的聚焦能力。
物距u 是物体距离镜头的距离,像距v 是成像点距离镜头的距离。
此外,还有一些计算远心镜头参数的公式如下:
45.6 焦距f = WD ×靶面尺寸( H or V) / FOV( H or V)
视场FOV ( H or V) = WD ×靶面尺寸( H or V) / 焦距f
视场FOV( H or V) = 靶面尺寸( H or V) / 光学倍率
工作距离WD = f(焦距)×靶面尺寸/FOV( H or V)
光学倍率= 靶面尺寸( H or V) / FOV( H or V) (远心镜头计算一致)
这些公式可能对于远心镜头的计算有帮助,但请注意这些公式可能需要在实际应用中进行调整和修改,以便适应特定的情况和需求。
一种远心镜头的标定方法及精度研究 -回复
一种远心镜头的标定方法及精度研究-回复研究背景和目的近年来,远心镜头的应用越来越广泛,如摄像机、望远镜等领域。
然而,远心镜头的标定方法及其精度一直是一个重要的研究课题。
准确的远心镜头标定方法能够提高镜头成像的质量和精度,对于各种应用中的测量和定位任务具有重要意义。
因此,本文旨在提出一种针对远心镜头的标定方法,并对其精度进行研究。
一、远心镜头基本原理远心镜头是一种独特的光学设计,其镜头与图像传感器之间存在一定的距离,使得图像被成像而成为远心图像。
相比于其他类型的镜头,远心镜头具有更高的分辨率和更大的视场深度。
二、远心镜头的标定方法1. 准备标定板为了进行远心镜头的标定,首先需要准备一个标定板。
该标定板应具有清晰可见的图案,例如棋盘格、圆形阵列等,并且其尺寸需要与标定相机视野相匹配。
2. 设置实验环境将标定板放置在一个光线充足且稳定的环境中,确保无其他干扰因素对标定的结果产生影响。
同时,调整好相机和标定板之间的距离,使得标定板完全位于远心镜头的成像平面内。
3. 采集标定图像通过相机拍摄标定板的照片,可以得到一系列的图像。
为了提高标定的准确性,应该采集多组不同姿态的图像,包括不同角度、不同距离等。
确保标定板在图像中占据足够大的比例。
4. 提取角点对采集到的标定图像进行预处理,然后使用角点提取算法提取图像中的角点。
角点是图像中边缘交汇处的位置,它们可以用来确定图像的畸变信息并进行标定。
5. 标定远心镜头根据提取到的角点信息,使用远心镜头的数学模型进行标定。
在这个过程中,通过求解镜头的内部参数(如焦距、主点坐标)和外部参数(如旋转角度、平移向量)来确定镜头的标定参数。
三、远心镜头标定精度研究针对以上标定方法,需要进行标定精度的研究。
常用的评估标准包括重投影误差和畸变校正能力。
重投影误差是指标定后的标定板在图像中的投影位置与实际位置之间的偏差。
通过计算重投影误差的平均值和标准差,可以评估标定方法的精度。
畸变校正能力是指标定方法对镜头畸变的校正能力,可以通过计算标定板上点的坐标在畸变图像中的投影位置与实际位置之间的偏差来评估。
一种远心镜头的标定方法及精度研究

好的,以下是一种远心镜头的标定方法及精度研究的详细内容:
机器视觉检测相比传统的坐标测量机具有成本低廉、检测速度快的优点。
对以往的远心镜头的标定方法进行了对比研究,提出了一种基于一组顺序图像并且简化外部参数的标定方法。
建立了远心镜头的模型,考虑了镜头的三种畸变情况,把复杂参数的矩阵求解转化为镜头参数的非线性最优化求解问题。
通过实验标定测试,远心镜头最佳测量景深为对焦点前后-9mm~8mm,保证系统处于6m以内的精度范围。
获得的畸变系数等参数项可以为视觉检测系统提供重要的变换依据,为建立高精度视觉测量系统建立了应用基础,具有工业应用价值。
关键词:机器视觉、远心镜头、高精度、有序图像组。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如何计算远心镜头的匹配精度
很多机器视觉项目工程师在做视觉项目评估时都会涉及到硬件匹配选型的精度计算。
大部分工程师都很清楚相机的分辨率和精度的关系,但是涉及到如何匹配镜头才能使得相机分辨率不浪费,这里面就需要了解一下关于镜头匹配精度的细节问题,下面BTOS就介绍一下这方面的知识。
首先介绍几个涉及到镜头精度的概念:
数值孔径NA和F#
它们都是描述单位点被光学系统采集到的光能量的量化指标
NA一般针对放大倍率大于1倍及其以上的光学系统,常用于显微镜
F#一般用于放大倍率小于1倍的光学系统,定焦、远心、变焦等
NA越大,镜头成像越亮,NA和F#的关系如下:
F#=1/2NA
相机的精度—分辨率(像元)
镜头的精度—分辨率(艾利斑)
物方的每个点经过光学系统到像方都会形成一个同心圆环组成的艾利斑
物方两个点无限靠近时,像方的艾利斑会叠加,当像方艾利斑中心间隔小到
0.61λ/NA{1.22λ(F#)}时达到分辨极限(设计时的理论极限)
红外IR——紫外UV(衍射极限随着波长的减小在变大)
极限频率=2NA/λ
λ为中心波长
从以上可以看出,镜头的分辨率和工作波段、光圈大小有着紧密的关系。
那么,如何通过计算镜头和相机匹配的精度呢?
首先要介绍关于MTF和CTF的概念:
MTF光学传递函数》CTF光学调制函数
MTF和CTF是镜头分辨率的另一种直观体现形式。
一个黑白相间的条纹称为一个线对
一个光学系统能够清晰分辨最细的一组图案(线对条纹)被认为是系统的分辨极限,表示为每毫米的线条数
镜头和相机是如何匹配的呢?
镜头和相机的靶面匹配:
镜头的成像圆直径=相机芯片对角线尺寸
镜头的成像圆直径<相机芯片对角线尺寸(黑角)
镜头的成像圆直径>相机芯片对角线尺寸(镜头倍率浪费)
镜头设计中心弥散圆直径相机像元尺寸
以相机像元尺寸做为整个成像系统的像方分辨精度,通过倍率换算得到物方
分辨精度。
光学倍率=h/H或v/V
光学倍率=像方分辨率/物方分辨率
相机的极限分辨率(线对)=1/2*像元尺寸
比如EM510相机2456*2058像元尺寸3.45μm
相机的极限分辨率(线对)=1/2*0.00345=144.93lp/mm
相机的靶面h=2456*0.00345=8.4mm
v=2058*0.00345=7.1mm
EM510匹配BT2336
BT2336的倍率为0.243X
整体精度为:
相机的极限分辨率(线对)*镜头倍率
144.93*0.243=35.217lp/mm
1/线对*2=精度(mm)
1/35.217*2=0.014mm
EM510匹配BT2336的精度即0.014mm
以上只是给大家简单介绍了一下镜头关于精度的一些概念,镜头和相机的匹配需要考虑的问题还很多,我们会在以后的技术文章里来做说明。