Pix4UAV处理无人机大数据操作流程
PIE-UAV 无人机影像数据处理软件PIE-UAV 用户手册说明书
PIESATPIE-UA V用户手册北京航天宏图信息技术股份有限公司目录1软件概述 (2)2安装说明 (4)1.1运行环境配置 (4)1.2软件安装注册说明 (4)1.3技术支持 (4)3软件详解 (5)3.1处理流程 (5)3.2数据准备 (5)3.2.1相片 (5)3.2.2位置信息 (6)3.2.3相机检校参数 (7)3.3界面及功能介绍 (7)3.3.1工程 (7)3.3.2运行 (8)3.3.3处理 (8)3.3.4影像显示 (9)3.3.5影像量测 (10)3.3.6视图 (11)3.3.7帮助 (13)4无控处理操作流程 (13)4.1新建工程 (13)4.2任务执行 (19)4.2.1工程设置 (19)4.2.2一键式处理 (20)4.2.3分步处理 (20)5有控处理操作流程 (21)5.1新建任务 (21)5.2任务执行 (21)5.2.1工程设置 (21)5.2.2空三解算 (22)5.2.3控制点编辑 (22)5.2.4有控区域网平差 (24)5.2.5创建DSM/DEM (25)1软件概述PIE-UAV是一款功能强大且易用的无人机航拍数据处理软件。
它无需人工干预,便可快速完成空三解算、DEM生成、正射影像拼接等一系列任务,从而生成标准化的DEM和DOM产品。
软件具有以下特性:操作简便通过向导式的步骤建立好工程,即可一键完成空三解算、DEM生成、DOM生成等所有过程。
用户不必掌握专业的摄像测量知识,通过简单的培训就能使用。
速度快原生64位软件,采用多核处理器和GPU联合加速,参考了世界上最新的计算机视觉和人工智能的研究成果,研发出一套具有国际领先水平的算法,使得该软件的处理效率在同行业内具有绝对的领先水平。
精度高空三解算的中误差优于0.5个像元。
支持地面控制点通过添加地面控制点,正射影像和高程可以达到测绘精度。
软件自检校功能软件可以通过相片进行自动近似解算相机畸变参数,即使相机没有事先经过检校,也可以进行处理。
无人机航测数据处理的方法和技巧
无人机航测数据处理的方法和技巧无人机(Unmanned Aerial Vehicle, UAV)的快速发展为各行业带来了很多新的应用领域,其中之一就是航测(Aerial Surveying)。
无人机航测通过搭载相机或其他传感器,可以获取高分辨率、大范围的地面数据。
然而,无人机航测数据的处理却是一个相对复杂的任务。
本文将介绍一些无人机航测数据处理的方法和技巧,帮助读者更好地利用这些宝贵的数据。
首先,无人机航测数据的处理需要从数据采集开始。
在选择航线和飞行参数时,要根据实际需求确定相机拍摄角度、航高、航速等参数。
航线的规划应该覆盖整个目标区域,并保持相邻航线的重叠率,以确保数据的完整性和准确性。
同时要注意飞行时的天气条件,避免风力过大或降雨等恶劣天气对数据采集的干扰。
数据采集完成后,下一步是对数据进行预处理。
这包括对图像进行校正、配准和去噪等处理。
校正主要是根据相机的内部参数和外部定向元素,对图像进行几何校正,消除图像中的畸变。
配准是将不同摄像头或不同时间采集的图像进行精确的对齐,以获取一致的地理坐标系。
去噪则是通过滤波和图像增强技术,降低图像中的噪声,提高图像质量。
接下来是特征提取和数据分析阶段。
在这个阶段,可以利用计算机视觉和图像处理技术,提取出图像中感兴趣的特征和目标物体。
例如,在土地利用和地形测量中,可以提取土地覆盖类型(如道路、建筑物、农田等)的信息;在植被监测和森林资源管理中,可以提取植被指数(如NDVI)等植被信息。
同时,还可以进行数据分析和模型构建,以了解目标区域的变化趋势和规律,为后续决策提供支持。
最后是数据可视化和结果输出。
利用地理信息系统(Geographic Information System, GIS)和三维可视化技术,可以将处理后的数据以图像、图表或模型等形式呈现出来。
这样不仅便于数据的可视化分析,还可以与其他地理数据进行叠加和比较,得出更全面的结论。
同时,结果的输出也要考虑到不同用户的需求,可以生成各种格式的报告、图像或数据集,以满足不同应用场景的需求。
Pix4UAV处理无人机数据操作流程
Pix4UAV软件处理无人机数据操作流程一、Pix4UAV处理无人机数据包括以下几个步骤:1、数据整理2、启动软件3、新建工程4、数据处理5、成果数据查看6、数据后处理二、具体操作步骤如下:1数据整理1)影像数据和POS数据的文件名及其存放的路径都不要出现中文。
原始数据的存储路径和成果数据的最好不在同一盘(若只有一个可以存放数据的盘,则两者最好不要在同一路径下,都放在根目录即可),否则有可能影响速度。
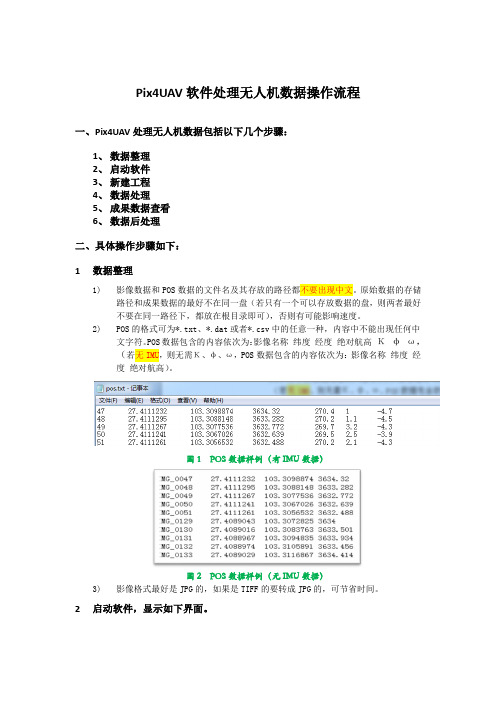
2)POS的格式可为*.txt、*.dat或者*.csv中的任意一种,内容中不能出现任何中文字符。
POS数据包含的内容依次为:影像名称纬度经度绝对航高Κφω,(若无IMU,则无需Κ、φ、ω,POS数据包含的内容依次为:影像名称纬度经度绝对航高)。
图1 POS数据样例(有IMU数据)图2 POS数据样例(无IMU数据)3)影像格式最好是JPG的,如果是TIFF的要转成JPG的,可节省时间。
2启动软件,显示如下界面。
3新建工程1)点击Project菜单,从列表中选择New Project。
2)弹出如下对话框,定义工程存放路径和工程名称。
点击Browse按钮,弹出如下对话框,定义工程存放的路径。
工程路径和工程名定义完成后,界面显示如下。
3)点击Next按钮,弹出加载影像数据的界面。
点击按钮,找到影像数据存放的路径并选中待处理的影像加载,加载数据完成后,显示界面如下。
4)点击next按钮,显示如下界面。
定义坐标系、相机参数,并导入POS数据。
①坐标系设定。
若默认的坐标系正确,则无需更改。
若不正确,则点击Images coordinate system选项卡中的按钮,弹出如下的定义坐标系界面。
可以通过点击来选择投影和坐标系;也可以通过导入通用的prj文件来定义坐标系。
②相机模型设定。
相机模型的核查、修改或自定义。
在Camera model选项卡中点击按钮。
显示如下界面。
点击Edit按钮可修改相机参数,修改完成后点击保存按钮;点击New按钮,定义新的相机模型,输入相机名称和相机参数,定义完成后点击保存按钮。
pix4d数据操作流程

点结束
1:双击处理选项打开后将23对勾去掉 2:在质量报告中生成正射对:1:GCP/MTB管理点开 2:导入控制点 3:文件—浏览(选CSV格式,EXCEL表数据需前加40)—OK
点OK
控制点/手动连接点点开将aa1外部旳点右击删除
1:控制点/手动连接点选中两个刺点就能够了 (选中旳两个距离远点) 2:处理——重新升级 3:刺其他几种,(刺点时看不清旳就不用重新刺)刺完重新升级。
三:1:1去掉对勾,2,3打对勾 2:点云——图像百分比选中1/2…>> 3:三维网格纹理对勾去掉 4:OK
开始——运营到完毕就结束了
添加途径——F\无人机资料\wanlinglubei\4\zp(点上不进去)—— choose——下一步
点上不进去
1:精度(水平)右击修改为0.020 2:精度(垂直)右击修改为0.040或0.050
(注意看整列精度是否全部修改) 3:下一步
1:已知坐标系,高级坐标系选项选中或打对勾 2:从列表中——基面China2023,坐标系CGCS2023…40——OK
PIX4D跑数据操作环节
一:无人机资料——wanlinglubei—4资料夹
1:新建资料夹zp(照片)将wanlinglubei中4资料夹全部照片复制到zp里边 2:新建资料夹pix4d
Pix4d打开——新项目
1:项目名称4(4自己命名) 2:创建在——浏览——F\无人机资料\wanlinglubei\4\pix4d(点上不进去)——选择文件夹—— 下一步
无人机航测数据处理流程
无人机航测数据处理流程
无人机航测数据处理流程主要分为以下几个步骤:
一、处理现场采集的数据:通过无人机航拍,采集现场信息,成
为数据集,如光影点云数据、三维模型等;
二、数据处理:将各种原始数据经过处理,切割成多个独立的栅
格或矢量数据,将空间数据和属性数据融合起来进行拼接;
三、数据分析:通过有效的统计方法,对数据进行解算,建立指
标体系,分析比较数据;
四、数据可视化:考虑展示需求,将三维模型等数据信息组合成
影像地图,把采集分析得到的数据在GIS绘图软件等进行可视化,能
够体现空间的对比性与综合性;
五、综合应用:将处理得到的可视图像与其他数据融合核查,得
出贴合当地特征的新找点数据,用于智能开发、决策分析等诸多应用。
无人机数据处理流程全面解析

无人机数据处理流程全面解析随着无人机技术的发展,无人机已成为许多行业中不可或缺的一部分。
然而,无人机拍摄的照片和视频,需要经过一系列的数据处理流程,才能得到高质量的成品。
在本文中,我们将全面解析无人机数据处理流程。
第一步:数据采集数据采集是整个数据处理流程中最重要的一步。
在进行数据采集前,需要规划好拍摄区域。
首先,确定所需的数据类型(如照片或视频),然后,为每个区域制定一个数据采集计划,并确定适当的飞行高度和方向。
之后,根据计划拍摄数据,并将其导出到计算机中进行后续处理。
第二步:数据组织和处理在数据采集完成后,需要对数据进行组织和处理。
这包括将照片或视频从无人机或存储卡中导入到计算机中,然后将其转换为标准的格式,以便后续的分析和处理。
此外,还需要对数据进行校验和清理。
首先,需要校验照片或视频是否完整。
如果数据不完整,需要重新采集。
其次,需要清除无用的数据,并对数据进行分类和序列化。
第三步:图像处理图像处理是无人机数据处理的核心部分。
在进行图像处理前,需要将图像预处理。
首先,对图像进行去噪处理,以增强图像质量。
其次,进行矫正,将图像转换为准确的地理坐标。
最后,对图像进行校正,以消除光线变化、摄像机摆动等影响因素。
在完成图像预处理后,进行图像分割和特征提取。
图像分割是将图像分解成各个组成部分的过程。
特征提取是从分割后的各个组成部分中提取有用的信息。
第四步:数据分析和应用数据分析和应用是无人机数据处理中的最后一步。
在进行数据分析前,需要根据具体应用场景和需求,确定合适的分析方法。
例如,如果是用于农业,可以进行作物生长分析和病害检测。
如果是用于地质探测,可以进行地质分析和矿产检测。
无论是哪种应用场景,都需要进行数据分析,以得出有用的结论和指导决策。
总结:无人机数据处理流程可以分为数据采集、数据组织和处理、图像处理和数据分析和应用四个步骤。
每个步骤都至关重要,缺陷任何一个环节都可能导致数据处理失败。
为了能够高效、准确地完成无人机数据处理,我们需要不断学习和更新数据处理技术,提高数据处理能力,将无人机技术应用于更广泛的领域。
无人机图像处理技术的使用教程
无人机图像处理技术的使用教程无人机图像处理技术近年来得到了广泛的应用和发展。
它不仅能够提供高分辨率的图像,还可以通过图像处理算法进行目标检测、地物识别和智能分析等任务。
本文将为您介绍无人机图像处理技术的使用教程,帮助您了解如何利用无人机图像进行各种应用。
1. 确定任务需求在使用无人机图像处理技术之前,我们首先要明确自己的任务需求。
需要根据具体的应用场景,确定需要处理的图像类型,比如航拍图像、红外图像或者是多光谱图像等。
同时,我们还要明确目标检测、地物识别、智能分析等具体的任务内容。
2. 选取合适的无人机平台和设备根据任务需求,我们需要选取合适的无人机平台和设备。
无人机平台的选择要考虑飞行时间、稳定性、载荷能力等因素。
同时,还要选择合适的摄像头设备,确保能够获取高质量的图像数据。
3. 图像获取与处理无人机完成飞行任务后,我们需要将获取的图像数据进行存储和传输。
一般来说,我们可以选择将图像数据存储在无人机设备的内存卡中,或者通过数据传输模块将图像数据传输到地面站。
在获取到图像数据后,我们可以使用图像处理软件进行后续的图像处理。
常用的图像处理软件包括Photoshop、Matlab和OpenCV等。
4. 图像预处理在进行图像处理之前,我们需要对图像进行预处理,以提高处理效果。
常见的图像预处理操作包括图像去噪、图像增强、调整图像亮度和对比度等。
图像预处理的目的是使得图像更加适合后续任务的处理。
5. 目标检测目标检测是无人机图像处理技术中重要的任务之一。
通过目标检测,我们可以自动识别图像中的目标物体,并标记其位置和边界框。
常用的目标检测算法包括Haar特征、HOG(Histogram of Oriented Gradient)特征和深度学习算法。
根据具体的任务需求,选择合适的算法进行目标检测。
6. 地物识别地物识别是无人机图像处理技术的另一个重要任务。
通过地物识别,我们可以自动识别图像中的地物,比如建筑物、道路和植被等。
pix4d数据操作流程

解决方案:重启软件或电脑,检查软件 版本是否最新,联系技术支持
PART SIX
新增功能和特性 修复已知问题 改进用户体验 对未来发展的影响
自动化和智能化: 提高数据处理速度 和精度,减少人工 干预
云服务和大数据: 实现大规模数据处 理和实时分析
文化遗产保护:利用PIX4D技术对文物进行数字化建模,为文化遗产的数字化保护和修复提 供支持。
灾害评估:利用PIX4D数据处理结果,评估灾害影响范围和程度,为灾后重建和风险管理提 供依据。
PART FIVE
确保数据路径正确,避免出 现找不到数据的情况
确保数据格式正确,避免出 现乱码或无法解析的情况
跨平台和移动应用 :提供更便捷的数 据获取和展示方式
定制化和插件化: 满足不同行业和项 目的需求,提供更 丰富的功能和工具
自动化程度更高
增强实时监测和预警功能
添加标题
添加标题
集成更多数据处理和分析工具
添加标题
添加标题
优化用户界面,提高易用性
汇报人:
精度评估方法:比较原始数据与处 理后数据的差异
精度影响因素:数据来源、处理算 法、传感器性能等
添加标题添加标题源自添加标题添加标题精度指标:包括平面精度、高程精 度等
精度提高措施:优化数据处理算法、 采用更高精度传感器等
城市规划:利用PIX4D数据处理结果,分析城市空间结构和规划方案的有效性。
农业监测:通过PIX4D数据处理,实现农作物生长状况、病虫害预警等方面的监测。
参数配置:根据需 求设置飞行高度、 方向、速度等参数
生成正射影像: 根据设置的参数 生成正射影像图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Pix4UAV软件处理无人机数据操作流程
一、Pix4UAV处理无人机数据包括以下几个步骤:
1、数据整理
2、启动软件
3、新建工程
4、数据处理
5、成果数据查看
6、数据后处理
二、具体操作步骤如下:
1数据整理
1)影像数据和POS数据的文件名及其存放的路径都不要出现中文。
原始数据的存储
路径和成果数据的最好不在同一盘(若只有一个可以存放数据的盘,则两者最好
不要在同一路径下,都放在根目录即可),否则有可能影响速度。
2)POS的格式可为*.txt、*.dat或者*.csv中的任意一种,内容中不能出现任何中
文字符。
POS数据包含的内容依次为:影像名称纬度经度绝对航高Κφω,
(若无IMU,则无需Κ、φ、ω,POS数据包含的内容依次为:影像名称纬度经
度绝对航高)。
图1 POS数据样例(有IMU数据)
图2 POS数据样例(无IMU数据)
3)影像格式最好是JPG的,如果是TIFF的要转成JPG的,可节省时间。
2启动软件,显示如下界面。
3新建工程
1)点击Project菜单,从列表中选择New Project。
2)弹出如下对话框,定义工程存放路径和工程名称。
点击Browse按钮,弹出如下对话框,定义工程存放的路径。
工程路径和工程名定义完成后,界面显示如下。
3)点击Next按钮,弹出加载影像数据的界面。
点击按钮,找到影像数据存放的路径并选中待处理的影像加载,加载数据完成后,显示界面如下。
4)点击next按钮,显示如下界面。
定义坐标系、相机参数,并导入POS数据。
①坐标系设定。
若默认的坐标系正确,则无需更改。
若不正确,则点击Images coordinate system选项卡中的按钮,弹出如下的定义坐标系界面。
可以通过点击来选择投影和坐标系;也可以通过导入通用的prj文件来定义坐标系。
②相机模型设定。
相机模型的核查、修改或自定义。
在Camera model选项卡中点击按钮。
显示如下界面。
点击Edit按钮可修改相机参数,修改完成后点击保存按钮;点击New按钮,定义新的相机模型,输入相机名称和相机参数,定义完成后点击保存按钮。
相机模型定义完成后,返回到如下界面。
③导入POS数据。
点击按钮,显示如下界面。
点击按钮,选择POS数据文件,完成后点击OK按钮。
界面如下。
5)点击Next按钮,显示如下界面。
6)点击按钮,新建工程过程完成。
4数据处理
1)在新建工程完成后,界面显示如下。
(在连外网的情况下,会显示底图和航迹图。
若无连外网,则只显示航迹图。
)
2)点击图标,显示界面如下。
3)先用Rapid模式来检查测区完整性和数据质量情况。
检查空三报告,如果空三结果较好,再使用Full模式进行处理;若空三出现问题,应检查数据情况,如(1)pos跟数据不对应,(2)原始质量问题:部分图像太暗或曝光过度,有黑边等情况;(3)拐角数据过多。
①选择Rapid单选按钮,将第二步和第三步的选中取消,显示如下。
②点击按钮,显示如下界面。
③在第一步完成后,变为绿色。
④点击图标,查看空三报告。
点击图标后,显示如下空三报告的PDF文档。
检查空三报告,如果空三结果较好,再使用Full模式进行处理;若空三出现问题,应检查数据情况,如ⅰ)pos跟数据不对应;ⅱ)原始质量问题:部分图像太暗或曝光过度,有黑边等情况;ⅲ)拐角数据过多。
4)在步骤3)完成后,再按如下方式进行设置,选中Full单选按钮,并选中第二步
和第三步的处理过程。
5)点击按钮,显示处理过程界面。
6)处理过程完成后,Local processing选项卡中的三个过程全部变为绿色。
5数据成果的查看
在处理过程完成后,找到工程保存的位置,打开以工程名命名的文件夹,再找到mosaic 文件夹打开,然后以图片浏览器打开文件名为“工程名_orthomosaic_geo_rgb.tif”(例如
)的DOM数据,查看结果是否满足要求,若拉花和错位的严重不满足要求,则进行第6步操作。
6数据后处理(镶嵌编辑)
以有拉花的房子为例来进行镶嵌编辑。
1)点击图标,弹出Scene editor界面。
2)将要编辑的房子在视窗中显示并单击,则包含此房子的镶嵌线变为棕黄色。
3)点击图标,然后在视窗界面点击,将有拉花的房子用多边形画出(注意:画出的
多边形必须与原有的镶嵌线边界有交叉; ctrl+z键可取消上一步操作)。
4)在新建的镶嵌线多边形上鼠标右击,显示如下界面。
5)点击Insert cell选项,则生成一新的镶嵌线。
选中新生成的镶嵌线,则可替代此区
域的单景影像显示在右边区域的列表中,如下图。
6)可通过Projection选项卡后的ortho和planar单选按钮进行真正射单景影像和平面
正射单景影像的的切换。
选中ortho或planar中的一个,然后从Available images 选项列表中选择满足要求的一景影像来替换有拉花的区域。
7)选中Blend mosaic按钮,界面如下显示。
8)从右栏中,点击Blend mosaic按钮,重新进行DOM的匀色镶嵌。
9)重新匀色镶嵌过程进行中。
10)匀色镶嵌过程完毕后会弹出如下对话框,点击OK完成。
11)用图片浏览器再次打开文件名为“工程名_orthomosaic_geo_rgb.tif”(例如
)的DOM数据,此时可看到原来有拉花的房屋被成功替换。