第二章船舶航向稳定性与回转性 2 3
02航向稳定性和回转性讲解

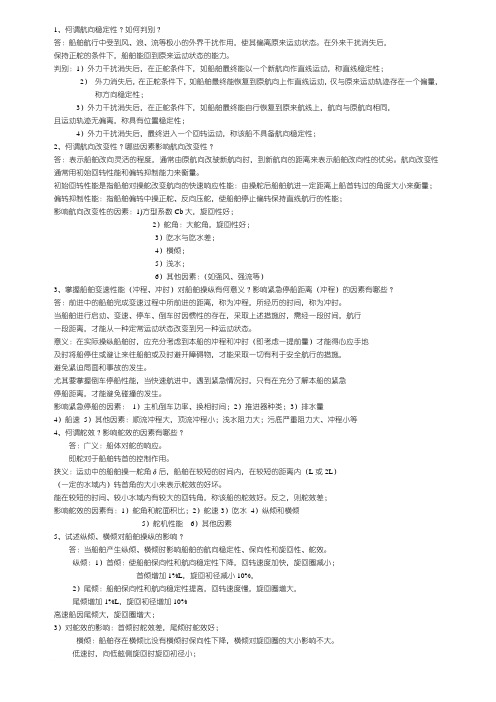
But rudder dimensions are limited by stern geometry艉部几何限制 Also, large rudders will increase drag and so reduce the ship‘s speed for a given delivered horse power from the propeller阻力增大,导致速降
the magnitude of the rudder‘s dimensions 舵的几何大小
the rudder angle 舵角 the ship‘s speed 船速
船海系:邱磊
操纵性权衡(Manoeuvrability trade-off)
《船舶操纵性与耐波性》课件
The need for good directional stability and minimum response oppose each other方向稳定性与应舵性矛盾
初始转首性能(Initial turning/course-changing ability) 偏转抑制性能(Yaw checking ability) 回转性能(Turning ability)--—大舵角下 停船性能(Stopping ability)
船海系:邱磊
5
6
固有动稳性(直线运动稳定性)
船海系:邱磊
《船舶操纵性与耐波性》课件
directionally unstable ship 不具方向稳定 性
directionally stable ship具 有方向稳定性
船海系:邱磊
运动响应(Response,应舵性、追随性)
《船舶操纵性与耐波性》课件
Is the requirement to turn in a satisfactory manner when a rudder order is given操舵指令发出后船舶是否按要求转向了? The ship must respond to its rudder and change heading in a specified minimum time 在给定的最短时间内船舶必须应舵转首 There should be minimum overshoot of heading after a rudder order is given超越角应最小 Both these response quantities are dependent upon应舵性的 大小取决于:
操纵(第02课)
t=0.004
D
. V0 R0
S=0.101
D
. V02 R0
式中: D为船舶排水量(t); VRt为00为为时V船间0舶时(m的的in定船);常舶速阻度力((kt)n;); S为启动惯性距离(m)。 根据经验,从静止状态逐级动车,直至达到定常速
度,满载船舶约需航经20倍船长左右的距离,轻载时约为 满载时的1/2~2/3。
2.影响船舶保向性的主要因素
1)船型 2)载态 3)舵角 4)船速
水下船型是决定船舶转头阻矩和惯性的重要因素, 水上船型是决定船舶所受风力及风力转船力矩大 小的重要因素。它们对保向性均有很大影响。表 现在:
(1)方形系数较低、长宽比较高的瘦削型船舶, 其保向性较优;浅吃水的宽体船保向性较差。
(2)尾倾较首倾时的保向性好。
增大所操的舵角,能明显地改善 船舶的保向性。超大型油轮小舵 角状态下有航向不稳定趋势,需 用较大舵角才能保向。
对于同一艘船而言,由于船速的 提高船舶保向性将变好。
其它因素:
保向性将因水深变浅而提高,船 舶顺风浪或顺流航行中保向性反 而降低。
第三节 船舶变速运动性能
= r.dt = r 0.e-t/T.dt = r0 . T
0
0
由上式可知,当干扰过去之后,船舶因干扰而 造成的偏航角应由干扰的大小(这可由干扰造 成的初始转头角速度来确定)和航向稳定性指 数T值的大小来决定;而同样干扰情况下,航 向稳定性好的船舶,干扰造成的偏航角也应该 低。
二、船舶航向稳定性的判别
1.根据航向稳定性指数判别 2.根据船舶的线型系数判别
船舶航向稳定性指数T>0,说明船舶 具有航向稳定性,且T值为越小的正 数,船舶的航向稳定性越好。航向稳 定性指数T<0,则说明船舶不具有航 向稳定性。船舶追随性好的船舶可以 同时判断为航向稳定性好的船舶。
船舶操纵基础理论DOC
第一章船舶操纵基础理论通过本章的学习,要求学员概念理解正确,定义描述准确,对船舶操纵性能够正确评估,并具有测定船舶操纵性能的知识。
根据船舶操纵理论,操纵性能包括:1)机动性(旋回性能和变速运动性能)2)稳定性(航向稳定性)第一节船舶操纵运动方程为了定量地描述船舶的操纵运动,我们引入船舶操纵运动方程,用数学方法来讨论船舶的运动问题。
一、船舶操纵运动坐标系1.固定坐标系Ox0y0z0其原点为O,坐标分别为x0,y0,z0,由于我们仅讨论水面上的船舶运动,因此,该坐标系固定于地球表面。
作用于船舶重心的合外力在x0,y0轴上的投影分别为X0和Y0对z0轴的合外力矩为N2. 运动坐标系Gxyz其原点为点G (船舶重心),坐标分别为x ,y ,z ,该坐标系固定于船上。
这主要是为了研究船舶操纵性的方便而建立的坐标系。
x ,y ,两个坐标方向的运动速度分别为u 和v ,所受的外力分别为X 和Y ,对z 轴的转动角速度为r ,z 轴的外力矩为N 。
二、 运动方程的建立根据牛顿关于质心运动的动量定理和动量矩定理,船舶在水面的平面运动可由下列方程描述:y 0⎪⎩⎪⎨⎧===ϕZ og o og o I N y m Y x m X该式一般很难直接解出。
为了方便,将其转化为运动坐标系表示,这样可以使问题大为简化。
经过转换,得:⎪⎩⎪⎨⎧=+=-=r I N ur vm Y vr u m X Z )()( 该方程看似复杂,但各函数和变量都与固定坐标系没有关系,因此,可以使问题大为简化。
三、 水动力和水动力矩的求解对于上述方程中的水动力和水动力矩可表示为:⎪⎩⎪⎨⎧===),,,,,,(),,,,,,(),,,,,,(δδδr v u r v u f N r v ur v u f Y r v u r v u f X N Y X经过台劳级数展开,可得X ,Y ,N 对各自变量的偏导数,称为水动力导数和水动力矩导数,它们可以通过船模试验求得。
船舶操纵2
• 船舶的追随性指数
– – – – T (turning lag index),单位为秒; T=I/N=船舶转动惯量/单位角速度旋回阻尼; T表示追随性优劣,T小,追随性好,应舵较快; T如果为负值,船舶航向不稳定。
三、操纵性指数
• 区分船舶操纵性
– 不同种类、结构 和大小的船舶, 其操纵性会有很 大的不同。按照 K、T指数比较船 舶的旋回轨迹, 可将船舶操纵性 概略地区分为四 类
4.外界因素
• 保向性将因水深变浅而提高; • 船舶顺风浪或顺流航行中保向性反而降低。
本节要点
• 影响旋回性的因素。
– 船型因素:方形系数、长宽比、水下侧面积、舵面积、车舵类型 – 操船因素:舵角、船速、吃水、纵倾、横倾以及外界因素
• 船舶航向稳定性
– 船舶运动稳定性的分类 – 船舶航向稳定性的含义
一、航向稳定性
• 稳定直航船舶受到瞬间干扰后,不用操舵, 船舶运动稳定性分类
一、航向稳定性
• 稳定直航船舶受到瞬间干扰后,不用操舵, 船舶运动稳定性分类
一、航向稳定性
• 稳定直航船舶受到瞬间干扰后,不用操舵, 船舶运动稳定性分类
一、航向稳定性
• 稳定直航船舶受到瞬间干扰后,不用操舵, 船舶运动稳定性分类
2
)
三、操纵性指数
• 转头惯性角的估算
– 船舶在航行中改向操舵后,船舶的转头角速度 r0到达某一定值后操正舵,船首继续转头惯性 角为: =r0T
四、舵效
• 舵效的概念
– 操舵后,会引起船首回转、横向移动、船速下降、船 体横倾等现象,广义上,舵效即为船体对舵的响应。 – 狭义上,舵效,操一舵角后船舶在一定时间、一定水 域内船首转过的角度大小。
航向稳定性的概念和试验

新技术在航向稳定性中的应用
要点一
总结词
要点二
详细描述
新技术的应用能够提高航向稳定性,例如智能控制技术、 传感器技术等。
随着智能化技术的发展,智能控制技术和传感器技术在航 向稳定性控制中得到广泛应用。通过实时监测船舶的运动 姿态和航向变化,智能控制系统能够快速响应,自动调整 船舶的航向,保持航向的稳定性。同时,新型传感器技术 的不断发展,也为航向稳定性的监测和调控提供了更准确 、更可靠的数据支持。
航向稳定性的概念和试验
目 录
• 航向稳定性概念 • 航向稳定性试验 • 航向稳定性在飞行器设计中的应用 • 航向稳定性与其他飞行性能的关系 • 未来航向稳定性的研究方向
01 航向稳定性概念
定义
航向稳定性是指船舶在受到外力干扰 后,能够自动恢复到原航向或预定航 向的能力。
航向稳定性是船舶性能的重要指标之 一,直接关系到船舶的安全和航行效 率。
航向稳定性不佳可能导致飞机偏离最佳航线,增加油耗和飞行时间,降低飞行效率。
航向稳定性与其他飞行性能的相互影响
航向稳定性与飞行稳定性密切 相关,良好的航向稳定性有助 于提高飞机的整体稳定性。
航向稳定性对飞机操纵性也有 重要影响,稳定的航向使得飞 行员能够更准确、迅速地操纵 飞机。
航向稳定性与飞行品质息息相 关,它直接影响着乘客的舒适 度以及飞行员的工作负荷。
报告撰写
撰写试验报告,将试验过程、方法、结果和结论进行详细记录和整理, 为后续的船舶设计、建造和运营提供参考和依据。
03 航向稳定性在飞行器设计 中的应用
飞行器设计中的航向稳定性考虑
飞行器航向稳定性是指飞行器在受到 扰动后,能够自动恢复到原航向或预 定航向的能力。在飞行器设计中,航 向稳定性是重要的性能指标之一,直 接关系到飞行安全和任务执行效果。
船舶操纵性总结汇总
操纵性绪论操纵性定义:船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。
操纵性内容:1. 航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。
2.回转性:表示船舶在一定舵角作用下作圆弧运动的性能。
3.转首性和跟从性:表示船舶应舵转首及迅速进入新的稳定运动状态的性能。
4. 停船性能:船舶对惯性停船和盗车停船的相应性能。
附加质量和附加惯性矩:作不定常运动(操纵和耐波运动)的船舶,除了船体本身受到愈加速度成比例的惯性力外,同时船体作用于周围的水,使之得到加速度。
根据作用力和反作用力,水对船体存在反作用力,这个反作用力称为附加惯性力。
附加惯性力是与船的加速度成比例的,其比例系数称为附加质量。
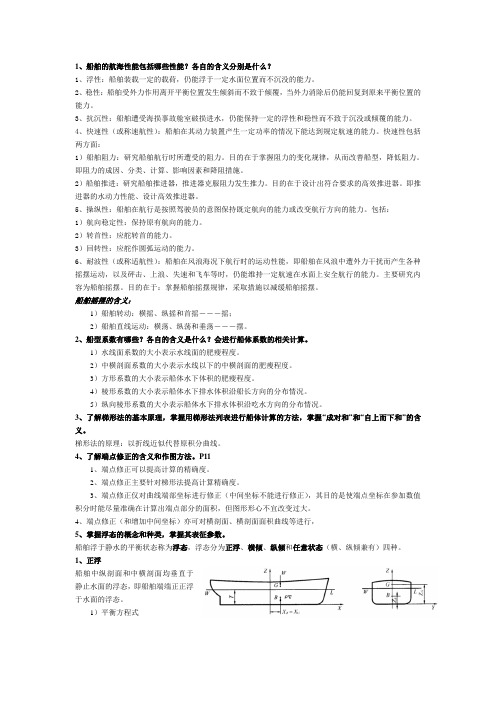
船舶操纵一、操纵运动方程1.1坐标系一、固定坐标系:固定坐标系是固结在地球表面,不随时间而变化的,如图所示。
首向角ψ:X 0与X 的夹角(由X 0转向X ,顺时针为正)。
二、运动坐标系:运动坐标系是固结在船体上的,随船一起运动的,如图所示。
重心坐标:X OG 、Y OG ; 船速:V 重心G 瞬时速度; 航速角ψ0:X0轴与船速V 夹角(顺时针为正);漂角:β船速与X 轴夹角(顺时针为正); 回转角速度:γ=dψdt;回转曲率:R 右舷为正; 舵角:δ左舷为正。
三、枢心:回转时漂角为零点、横向速度为零的点。
1.2线性运动方程一、坐标转换00cos sin sin cos ψψψψ=-=+G G x u v y u v二、简化方程当重心在原点处:X G =0 运动坐标系一般方程:三、对于给定船型、给定流体中的运动情况船型参数和流体特性为已知条件; 操纵运动为缓变过程,忽略高阶小量; 忽略推进器转速影响;操舵过程短暂,忽略转舵加速度。
则可将给定船型流体中受力情况表示如下:由泰勒展开式,用水动力导数表示如下:四、简化后的操纵运动线性方程式:2()()()ψψψψψψ=--=++=++G G Z G X m u v x Y m v u x N I mx vu 00cos sin ψψ=+G G X mx my 00cos sin ψψ=-G G Y mymx ()()ψψψ=-=+=z X m u v Y m v u NI (,,,,,,)(,,,,,,)(,,,,,,)X X u v r u v r Y Y u v r u v r N N u v r u v r δδδ===v r v r v r v r Y Y v Y r Y v Y r Y N N v N r N v N r N δδδδ=++++=++++111()()v ur v u u r r v u r+=++∆+∆=+1.3水动力导数一、定义:匀速直线运动时,只改变一个运动参数,其他不变引起的作用于船舶水动力对运动参数的变化率。
船舶操纵问答题
1、何谓航向稳定性?如何判别?答:船舶航行中受到风、浪、流等极小的外界干扰作用,使其偏离原来运动状态。
在外来干扰消失后,保持正舵的条件下,船舶能回到原来运动状态的能力。
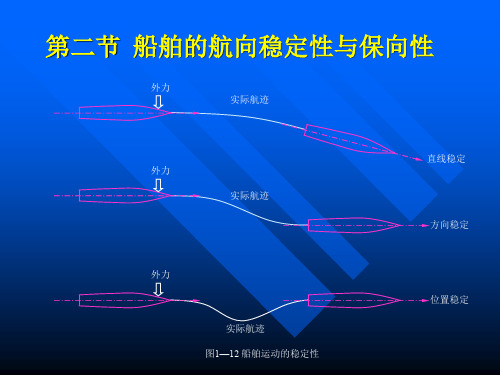
判别:1)外力干扰消失后,在正舵条件下,如船舶最终能以一个新航向作直线运动,称直线稳定性;2)外力消失后,在正舵条件下,如船舶最终能恢复到原航向上作直线运动,仅与原来运动轨迹存在一个偏量,称方向稳定性;3)外力干扰消失后,在正舵条件下,如船舶最终能自行恢复到原来航线上,航向与原航向相同,且运动轨迹无偏离,称具有位置稳定性;4)外力干扰消失后,最终进入一个回转运动,称该船不具备航向稳定性;2、何谓航向改变性?哪些因素影响航向改变性?答:表示船舶改向灵活的程度,通常由原航向改驶新航向时,到新航向的距离来表示船舶改向性的优劣。
航向改变性通常用初始回转性能和偏转抑制能力来衡量。
初始回转性能是指船舶对操舵改变航向的快速响应性能:由操舵后船舶航进一定距离上船首转过的角度大小来衡量;偏转抑制性能:指船舶偏转中操正舵、反向压舵,使船舶停止偏转保持直线航行的性能;影响航向改变性的因素:1)方型系数Cb大,旋回性好;2)舵角:大舵角,旋回性好;3)吃水与吃水差;4)横倾;5)浅水;6)其他因素:(如强风、强流等)3、掌握船舶变速性能(冲程、冲时)对船舶操纵有何意义?影响紧急停船距离(冲程)的因素有哪些?答:前进中的船舶完成变速过程中所前进的距离,称为冲程,所经历的时间,称为冲时。
当船舶进行启动、变速、停车、倒车时因惯性的存在,采取上述措施时,需经一段时间,航行一段距离,才能从一种定常运动状态改变到另一种运动状态。
意义:在实际操纵船舶时,应充分考虑到本船的冲程和冲时(即考虑一提前量)才能得心应手地及时将船停住或避让来往船舶或及时避开障碍物,才能采取一切有利于安全航行的措施,避免紧迫局面和事故的发生。
尤其要掌握倒车停船性能,当快速航进中,遇到紧急情况时,只有在充分了解本船的紧急停船距离,才能避免碰撞的发生。
船舶原理
1、船舶的航海性能包括哪些性能?各自的含义分别是什么?1、浮性:船舶装载一定的载荷,仍能浮于一定水面位置而不沉没的能力。
2、稳性:船舶受外力作用离开平衡位置发生倾斜而不致于倾覆,当外力消除后仍能回复到原来平衡位置的能力。
3、抗沉性:船舶遭受海损事故舱室破损进水,仍能保持一定的浮性和稳性而不致于沉没或倾覆的能力。
4、快速性(或称速航性):船舶在其动力装置产生一定功率的情况下能达到规定航速的能力。
快速性包括两方面:1)船舶阻力:研究船舶航行时所遭受的阻力。
目的在于掌握阻力的变化规律,从而改善船型,降低阻力。
即阻力的成因、分类、计算、影响因素和降阻措施。
2)船舶推进:研究船舶推进器,推进器克服阻力发生推力。
目的在于设计出符合要求的高效推进器。
即推进器的水动力性能、设计高效推进器。
5、操纵性:船舶在航行是按照驾驶员的意图保持既定航向的能力或改变航行方向的能力。
包括:1)航向稳定性:保持原有航向的能力。
2)转首性:应舵转首的能力。
3)回转性:应舵作圆弧运动的能力。
6、耐波性(或称适航性):船舶在风浪海况下航行时的运动性能,即船舶在风浪中遭外力干扰而产生各种摇摆运动,以及砰击、上浪、失速和飞车等时,仍能维持一定航速在水面上安全航行的能力。
主要研究内容为船舶摇摆。
目的在于:掌握船舶摇摆规律,采取措施以减缓船舶摇摆。
船舶摇摆的含义:1)船舶转动:横摇、纵摇和首摇―――摇;2)船舶直线运动:横荡、纵荡和垂荡―――摆。
2、船型系数有哪些?各自的含义是什么?会进行船体系数的相关计算。
1)水线面系数的大小表示水线面的肥瘦程度。
2)中横剖面系数的大小表示水线以下的中横剖面的肥瘦程度。
3)方形系数的大小表示船体水下体积的肥瘦程度。
4)棱形系数的大小表示船体水下排水体积沿船长方向的分布情况。
5)纵向棱形系数的大小表示船体水下排水体积沿吃水方向的分布情况。
3、了解梯形法的基本原理,掌握用梯形法列表进行船体计算的方法,掌握“成对和”和“自上而下和”的含义。