飞机横航向稳定性分析
91108-飞行力学-第10章:飞机的横航向动稳定性和操纵性

第10章飞机的横航向动稳定性和动操纵性作业:10.1 10.2 10.4 10.5内容10.1 飞机横航向动稳定性10.1.2 典型的横航向运动模态10.1.3 滚转模态10.1.4 螺旋模态10.1.5 滚转--螺旋模态10.1.6 荷兰滚模态10.2 飞机横航向动操纵性10.2.1 副翼的操纵反应10.2.2 方向舵的操纵反应小结由组成的四阶方程,对于正常布局的飞机,它由一个负的大实根、一对实部为负的共轭复根和一个小的实根(可正可负)组成。
10.1.2 典型的横航向运动模态,,,p r βφ滚转模态荷兰滚模态螺旋模态负的大实根负的共轭复根小的实根对应于特征方程中的一个大的负实根; 其特征是衰减很快的非周期运动,其振幅衰减一半的时间仅为零点几秒;受横侧扰动后,飞机绕机体轴的单自由度滚转,收敛过程很快。
运动变量是滚转角速度和滚转角;飞机具有较大的横向阻尼(来源机翼),运动衰减快,一般均能满足品质要求。
1.滚转模态,p φlpC飞机横航向运动中最重要的模态; 对应特征方程中的一对共轭复根,滚转角、侧滑角和偏航角的量级相同; 偏航运动略超前滚转,即左偏航时右滚转。
飞机重心沿直线轨迹前进,颇似荷兰人的滑冰动作而得名;模态频率高,周期约为数秒至十几秒,介于纵向长、短周期之间。
品质规范对其特性有严格要求。
,,βφψ荷兰?3.螺旋模态对应特征方程中的一个小实根; 特征是衰减缓慢的非周期运动,运动变量为偏航角和滚转角;允许其特征根为一小的正根,由于运动不稳定时呈螺旋状而得名; 运动缓慢,半幅或倍幅时间长,约上百秒,易于纠正,对其模态特性要求不高。
,ψφ4.为什么飞机受到横航向扰动后,飞机首先表现出滚转运动,然后是荷兰滚运动,最后才是螺旋运动?内容10.1 飞机横航向动稳定性10.1.2 典型的横航向运动模态10.1.3 滚转模态10.1.4 螺旋模态10.1.5 滚转--螺旋模态10.1.6 荷兰滚模态10.2 飞机横航向动操纵性10.2.1 副翼的操纵反应10.2.2 方向舵的操纵反应小结表征为绕轴转动的单自由度运动。
飞机平衡控制—飞机的稳定性与操纵性

稳定性
飞机的情况也是一样,也有 稳定、不稳定和中和稳定三 种情况。
稳定性
飞机纵向稳定性(俯仰稳定性)
ห้องสมุดไป่ตู้
稳定性
飞机方向稳定性
稳定性
飞机侧向稳定性 影响飞机侧向稳定性的因素主要是机翼的上反角和后掠角。
操纵性
飞机的操纵性是飞机跟随驾 驶员操纵驾驶杆、脚蹬动作 而改变其飞行状态的特征。 飞机通过主操纵面—升降舵、 方向舵和副翼对绕3个轴的 运动进行操纵。
操纵性
飞机重心位置的前后移动会影响飞机的纵向操纵性能。 重心前移,增大同样迎角,所需要的升降舵上偏角增大,重心前移越多, 上偏角越大,但升降舵上偏角是有一定限定的,重心前移过多,就可能 出现即使驾驶杆拉到底,飞机也不能增加到所需要的迎角,因此重心位 置应有个前限,称为重心前极限。
操纵性
俯仰稳定性强的飞机,俯仰操纵时比较迟钝;俯仰稳定性弱的飞机,俯 仰操纵时比较灵敏。
民用飞机横航向增稳系统设计研究分析论文
民用飞机横航向增稳系统设计研究分析论文民用飞机横航向增稳系统设计研究分析论文大型客机在高空、高速飞行时,在受到阵风或紊流的扰动时,由于飞机自身稳定性不足,飞机往往会出现低阻尼比的俯仰振荡和横航向振荡,驾驶员对这种短周期的振荡模态来不及反应,极大的影响飞行员的操纵和乘客的乘坐品质,严重情况会造成飞机的事故。
为了保证飞机的飞行安全,满足要求的飞行品质,通常需要必须要在飞的三个轴向操纵系统中加入增稳系统,以便增大飞机振荡模态的阻尼比,增强飞机的稳定性和改善飞机的操纵性。
增稳系统主要分为纵向以及横航向两种增稳控制构型,纵向增稳控制律设计的主要目的是改善飞机短周期运动特性,横航向增稳控制律设计的主要目的是改善飞机的荷兰滚运动特性。
由于飞机横航向运动的交连耦合的影响造成了横航向运动的复杂性,因此横航向增稳系统的设计比纵向操稳系统难。
该文对某型飞机的横航向增稳系统进行了设计,对并其仿真结果进行了分析。
1横航向增稳控制系统方案控制增稳的控制律是电传操纵系统最基本的控制模态,是电传操纵系统实施对飞机的控制以及实现各种主动控制功能的基础。
控制增稳的控制律设计,首先要满足稳定性要求。
设计实践经验表明,在线性设计阶段,应力求留出足够的幅值稳定裕量和相位裕量;从而使非线性设计和实际系统交付时,得以满足6分贝幅值裕量和45°相位裕量的指标要求。
具体设计指标如下。
(1)滚转轴操纵具备滚转角速度控制/倾斜角姿态保持响应类型,并具有自动转弯协调能力。
(2)偏航角操纵具备常规的侧滑角控制响应类型,而由侧滑引起的滚转趋势可以通过副翼调节自动防御。
(3)荷兰滚阻尼比大于0.5,滚转角速度响应零点和荷兰滚极点尽量对消,以提高乘坐品质。
(4)滚转模态半衰期足够小。
(1)偏航通道中引入偏航角速率反馈。
(2)滚转通道中引入滚转角速率反馈。
(3)偏航通道和滚转通道中引入侧滑角或侧向过载反馈。
1.1基于偏航角速率反馈方向舵控制方案简化后的以方向舵偏量为控制输入、偏航角速率为输出的'传递函数。
飞机横航向稳定性分析资料
编号毕业设计题目飞机横航向稳定性分析学生姓名学号学院专业班级指导教师二〇一六年六月本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)(题目:)是本人在导师的指导下独立进行研究所取得的成果。
尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。
作者签名:年月日(学号):飞机横航向稳定性分析摘要飞机的稳定性是保证飞行安全的最基本要求,本文主要目的是对常规布局飞机的横航向稳定性进行分析,并利用Matlab编写程序来实现飞行器横航向稳定性分析;我们首先建立飞行器的运动学方程和动力学方程,得到飞行器正常飞行的力学模型,利用模型充分研究影响飞行器横航向稳定性的因素后,为了利用矩阵工具对方程进行求解,我们采用合理方法使飞行器运动方程线性化;线性化后我们发现飞机的横、纵向方程并不耦合,我们把飞机横向线性方程分离出来,并将其整理成矩阵形式,然后求出矩阵的特征值和特征向量,利用特征值与飞行模态的对应关系就可以确定飞机的稳定性关键词:稳定性,运动方程,建模,线性化Aircraft lateral and directional stability AnalysisSystemAbstractThe stability of the aircraft is the most basic requirements to ensure flight safety, the main purpose of this article is lateral and directional stability of the general layout of the aircraft for analysis and programming using Matlab to achieve the aircraft lateral and directional stability analysis; we first establish the kinematics of the aircraft equation and dynamic equation, the mechanical model of aircraft normal flight, the full study using the model aircraft after the impact factors of stability cross course, in order to take advantage of tools matrix equation is solved, we have adopted a reasonable approach enables linear equations of motion of the aircraft; linearization we found that the aircraft's horizontal and vertical coupling equation does not, we separated the plane transverse linear equations, and organized into a matrix, and then find the eigenvalues and eigenvectors using the eigenvalues and the corresponding flight modes relations can determine the stability of the aircraftKey Words:Stability; Equations of motion; Modeling; Linearization目录摘要 (i)Abstract ........................................................................................................................................ i i 目录......................................................................................................................................... i ii 第一章引言.. (1)1.1 飞行器的稳定性的提出及定义 (1)1.1.1 飞行器的平衡和配平 (1)1.1.2 稳定性的提出 (1)1.1.3 稳定性的定义 (1)1.1.4 稳定性的影响因素 (2)1.2 飞行器的横航向稳定性定义及影响因素 (3)1.2.1 横航向稳定性的定义 (3)1.2.2 飞行器横向稳定性的影响因素 (4)1.3 论文的结构与主要内容 (4)1.3.1 稳定性研究的目的与意义 (4)1.3.2 论文的主要结构 (5)第二章刚性飞行器运动方程 (7)2.1常用坐标系及其转换 (7)2.1.1常用的坐标轴系 (7)2.1.3坐标转换矩阵 (7)2.1.2常用坐标系之间的关系 (10)2.2刚性飞行器动力学方程 (12)2.2.1飞行器质量中心移动的动力学方程 (12)2.2.2飞行器绕质量中心转动动力学方程 (16)2.3 刚性飞行器运动学方程 (20)2.3.1 飞行器质量中心运动学方程 (20)2.3.2 飞行器绕质量中心转动运动学方程 (20)2.4 方程组中的几何关系 (21)第三章运动方程线性化 (23)3.1 小扰动法 (23)3.1.1 基本概念 (23)3.1.2 基本假设 (23)3.2运动方程组线性化 (24)3.2.1线性化方法 (24)3.2.2 外力合外力矩的线性化 (25)3.2.3运动方程的线性化 (26)第四章横航向运动稳定性判断 (30)4.1横航向小扰动运动方程组 (30)4.1.1 横航向小扰动运动方程组矩阵化 (30)4.1.2 方程模态特性分析方法 (33)第五章飞机横航向稳定性分析实例 (35)5.1 某型飞机的稳定性判断 (35)5.1.1 程序的结构与框架 (35)5.1.2 某型飞机的计算实例 (35)第六章总结与展望 (39)参考文献 (40)致谢 (41)第一章引言1.1 飞行器的稳定性的提出及定义1.1.1 飞行器的平衡和配平飞行器在正常飞行时,飞行器的平衡状态是所有作用在飞行器上的外力、外力矩之和全为零的状态。
航空器的动态稳定性与控制

航空器的动态稳定性与控制在广袤的蓝天中,航空器自由翱翔。
然而,这看似轻松的飞行背后,隐藏着一系列复杂而关键的科学原理,其中航空器的动态稳定性与控制无疑是至关重要的方面。
要理解航空器的动态稳定性,首先得明白什么是稳定性。
简单来说,稳定性就是指物体在受到干扰后,是否能够恢复到原来的状态。
对于航空器而言,动态稳定性指的是其在飞行过程中,当受到气流变化、操纵输入或其他外部因素干扰时,能够自动趋向于恢复平衡状态的能力。
航空器的动态稳定性可以分为纵向稳定性、横向稳定性和方向稳定性。
纵向稳定性关乎飞机在俯仰方向上的稳定,也就是机头的上下运动。
比如,当飞机因为气流的影响而机头突然上仰时,如果飞机具有良好的纵向稳定性,它会自动产生一个恢复力矩,使机头重新回到水平位置。
横向稳定性则主要涉及飞机在滚转方向上的稳定,即机翼的左右倾斜。
方向稳定性则侧重于飞机在偏航方向上的稳定,也就是机头的左右转动。
这些稳定性的实现,离不开航空器自身的设计特点。
比如,机翼的形状、位置和面积,尾翼的大小和布局,机身的形状和重量分布等,都对稳定性有着重要的影响。
以机翼为例,上凸下平的形状使得气流在经过时产生压力差,从而产生升力。
同时,机翼的安装角度和位置也会影响飞机的稳定性。
如果机翼位置过高或过低,都可能导致稳定性变差。
控制,是实现和维持航空器稳定性的重要手段。
航空器的控制系统就像是驾驶员手中的“缰绳”,能够对飞机的姿态和运动进行精准的操控。
在现代航空器中,常见的控制面包括副翼、升降舵和方向舵。
副翼位于机翼的后缘,通过左右副翼的差动运动,可以实现飞机的滚转控制。
升降舵通常位于水平尾翼的后缘,用于控制飞机的俯仰运动。
方向舵则位于垂直尾翼的后缘,负责飞机的偏航控制。
除了这些传统的控制面,现代航空器还采用了一系列先进的控制技术。
比如电传操纵系统,它通过电子信号将驾驶员的操纵指令传递给控制面,相比传统的机械操纵系统,具有响应更快、精度更高、重量更轻等优点。
自转旋翼机横航向稳定性分析

67信息记录材料 2018年3月 第19卷第3期(2)社会价值水是生命之源,不仅工业农业的发展要靠水,水更是城市发展,人民生活的生命线。
本系统不但能够达到节水减排的目的,而且通过使用本家用热水器节水回水再利用智能系统节约用水还可以带来明显的环境效益,除了提高水资源承载能力、水环境承载能力等方面的效益外,还有美化环境、维护河流生态平衡等方面的效益。
1 引言自转旋翼机是介于固定翼飞机和直升机之间的一种特殊的机型,它的发展为直升机后面的崛起奠定了坚实的基础。
自转旋翼机是第一种直接使用旋翼产生升力的飞机,因此它是直升机的先驱者。
自转旋翼机以无动力旋翼为主要升力面,螺旋桨提供推力或者牵引力,起飞方式主要是滑跑。
有些复杂的旋翼机可以实现垂直起降或者超短距起降,因为可以安装预转机构或者旋翼桨尖喷气,自转旋翼机兼具固定翼飞机和直升机的优点,如经济性好、结构简单、安全性好及振动噪声小等[1,2]。
它在运动和娱乐飞行中越来越流行,但至今没有发现它在商业和军事中的实际用途,而这和此种飞机的适航性有很大的关系,研究它的稳定性对于自转旋翼机适航性的制定和揭示它的飞行力学本质有着重大的意义。
对于自转旋翼机的研究,国外主要集中在Glasgow 大学的Houston 教授团队[3-9],国内南航的李建波团队对此也做了大量的工作。
著名直升机专家Leshiman 教授对自转旋翼机的技术发展做了全面的总结,本文研究的对象为西班牙的ELA 07自转旋翼机,如图1。
图1 ELA 07自转旋翼机2 旋翼机建模2.1 部件建模本文采用部件建模方法,包括机身、旋翼、螺旋桨、尾翼,综合考虑计算速度和精确度,旋翼诱导速度采用动量理论计算,针对本机型特殊的主旋翼,它的来流是从下至上传过桨盘,结合它独特的特性,推导出旋翼气动模型,其它几个部件的模型比较简单,在此不再赘述。
2.2 稳定性分析模型对于自转旋翼机运动方程: 是自转旋翼机的一个平衡位置,即:在附近受到小扰动,状态变量和控制变量变为:带入运动方程中即可得到:若略去符号Δ即可得到平衡点处的小扰动线化方程:将其表示为状态方程形式,令:即可表示为:其中A 为小扰动线化模型的状态矩阵,B 为小扰动线化模型的控制矩阵。
无人机(固定翼)组装与调试技术 飞机的横向稳定性
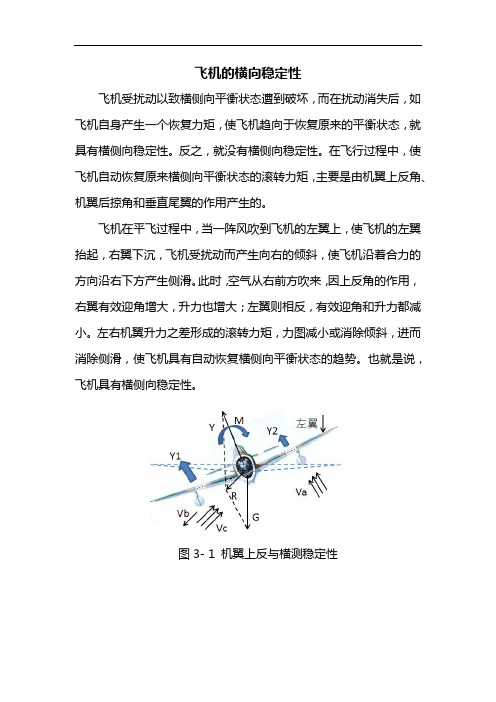
飞机的横向稳定性飞机受扰动以致横侧向平衡状态遭到破坏,而在扰动消失后,如飞机自身产生一个恢复力矩,使飞机趋向于恢复原来的平衡状态,就具有横侧向稳定性。
反之,就没有横侧向稳定性。
在飞行过程中,使飞机自动恢复原来横侧向平衡状态的滚转力矩,主要是由机翼上反角、机翼后掠角和垂直尾翼的作用产生的。
飞机在平飞过程中,当一阵风吹到飞机的左翼上,使飞机的左翼抬起,右翼下沉,飞机受扰动而产生向右的倾斜,使飞机沿着合力的方向沿右下方产生侧滑。
此时,空气从右前方吹来,因上反角的作用,右翼有效迎角增大,升力也增大;左翼则相反,有效迎角和升力都减小。
左右机翼升力之差形成的滚转力矩,力图减小或消除倾斜,进而消除侧滑,使飞机具有自动恢复横侧向平衡状态的趋势。
也就是说,飞机具有横侧向稳定性。
图3- 1 机翼上反与横测稳定性图3- 2 机翼后掠角与横测向稳定性机翼后掠角也使飞机具有横侧向稳定性。
一旦因外界干扰使飞机产生了向右的倾斜,飞机的升力也跟着倾斜,飞机将沿着合力R的方向产生侧滑。
由于后掠角的作用,飞机右翼的有效速度v大于左翼的1有效速度v,所以,在右边机翼上产生的升力将大于左边机翼上产生3的升力,两边机翼升力之差,形成滚转力矩,力图减小或消除倾斜,使飞机具有横侧向稳定性。
跨声速或超声速飞机,为了减小激波阻力,大都采用了后掠角比较大的机翼,因此,后掠角的横侧向稳定作用可能过大,以致于当飞机倾斜到左边后,在滚转力矩的作用下,又会倾斜到右边来。
于是,飞机左右往复摆动,形成飘摆现象(荷兰滚)。
为了克服这种不正常现象,可以采用下反角的外形来削弱后掠机翼的横侧向静稳定性。
低、亚声速飞机大都为梯形直机翼,为了保证飞机的横侧向静稳定性要求,或多或少都有几度大小的上反角。
此外,如果机翼和机身组合采用上单翼布局形式,也会起到横侧向静稳定作用;相反,采用下单翼布局形式,则会起到横侧向静不稳定作用。
这一点在选择上反角时也应综合考虑。
航空器的动态稳定性分析
航空器的动态稳定性分析在现代航空领域,航空器的动态稳定性是一个至关重要的研究课题。
无论是民用客机的安全舒适飞行,还是军用飞机的高性能作战,都离不开对其动态稳定性的深入理解和精确分析。
动态稳定性指的是航空器在受到外界干扰后,能否自动恢复到初始平衡状态的能力。
这一特性直接关系到飞行的安全性和操纵性。
航空器的动态稳定性受到多种因素的影响。
首先是机身的气动布局。
机翼的形状、大小、位置以及尾翼的设计等都会对空气动力产生作用,从而影响航空器的稳定性。
例如,大展弦比的机翼通常会提供较好的纵向稳定性,而较窄的机翼则可能在机动性方面表现更出色,但稳定性相对较弱。
航空器的质量分布也是一个关键因素。
重心位置的变化会显著改变飞机的动态特性。
如果重心过于靠前,飞机可能在俯仰方向上过于稳定,但操纵灵敏度会降低;反之,重心靠后可能增加操纵的灵活性,但也可能导致稳定性不足。
飞行速度同样对动态稳定性产生影响。
在不同的速度下,空气的流动特性发生改变,作用在航空器上的气动力也会有所不同。
高速飞行时,空气的压缩性不可忽略,这可能导致一些在低速时不明显的不稳定现象出现。
为了分析航空器的动态稳定性,工程师们采用了多种方法和技术。
其中,理论分析是基础。
通过建立数学模型,利用空气动力学和力学原理,计算出航空器在各种情况下的受力和运动状态。
然而,由于实际情况的复杂性,理论模型往往存在一定的局限性。
风洞试验是另一种重要的手段。
将航空器的模型放入风洞中,模拟不同的气流条件,可以直观地观察到气动力的作用效果,获取有关稳定性的数据。
但风洞试验也有其缺点,比如无法完全模拟真实飞行中的所有情况。
数值模拟方法近年来发展迅速。
借助强大的计算机和先进的软件,对航空器周围的流场进行详细的计算和分析。
这种方法能够处理复杂的几何形状和流动现象,但需要准确的输入参数和可靠的计算模型。
在实际飞行中,飞行员通过操纵飞机的感受和飞机的响应来判断其稳定性。
如果飞机在受到干扰后能够迅速、平稳地恢复到原状态,说明具有较好的动态稳定性;反之,如果飞机出现过度的振荡或难以控制的情况,则可能存在稳定性问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.3.2
这篇论文首先从飞行器的力学模型入手,在前面定义的四个坐标系中得到飞行器的动力学(转动、移动)方程和运动学方程,利用得到的方程关系研究飞行器的稳定性问题,但要首先研究飞行器运动方程线性化,线性化后的方程更便于仔细分析;然后研究飞行器横航向稳定性分析方法,从而对飞行器横航向运动建模。最后设计飞行器横航向稳定性分析系统。
1.1.3
稳定性是指飞行器正常飞行中偶然受外力(突风、侧风)干扰后不需要驾驶员对舵面进行调整,飞机靠自身特性保持原来正常飞行状态的能力。
飞行器的稳定性问题,和上述圆球在圆弧曲线上能否保持稳定的情况在实质上是相同的。如果在飞行过程中飞行器由于外界瞬时微小扰动而偏离了平衡状态,这时若在飞行器上能够产生稳定力矩,那么飞行器将具有自动恢复到原来平衡状态的能力,同时阻尼力矩在飞行器摆动过程将起到阻碍作用,使飞行器摆动幅度逐渐减小,那么飞行器将能像图1.1(a)所示的圆球一样,不需要依靠驾驶员的额外介入就能依靠自身的阻尼作用自动地恢复到初始的平衡状态,因而它是稳定的,或者说飞行器具有稳定性;相反的,如果在飞行器受到外界扰动后偏离平衡状态后自身系统产生的力矩是不稳定力矩,那么飞行器将发散震荡、或者长时间震荡,受到震荡后越来越偏离自己原来处于的平衡位置,因而我们说它是没有稳定性。由上文可知,现代飞机设计中为了保证飞行安全和便于驾驶员方便操纵,现代设计的飞行器必须有严格的稳定性要求。
1.2.2
机翼的上反角、后掠角和垂直尾翼等是保证飞行器横向稳定性的主要部件。后掠角越大,其所起的横向静稳定作用越强。如果后掠角很大(如—些超音速大后掠翼战斗机),就可能导致过分的横向静稳定性,一般用上反角替代使用;当飞行器向某一方向滚转时,向下方向的机翼更接近水平,产生额外升力;向上一侧的机翼更偏离水平,升力下降,升力差导致其产生稳定力矩。恢复水平位置。这相当于让机翼在水平投影上的面积改变了,机翼的气动效率等于与其在水平投影面积相同的机翼,同时也改变了机翼迎角,使其存在上下气流分量;当飞行器(不论何种原因)出现侧滑角β时,在垂直尾翼上就会产生侧力ΔY,它不但能为航向提供恢复力矩,而且由于垂直尾翼一般都装在机身的上面,所以还有滚转力矩ΔMx,它是一个横向稳定力矩,所以垂尾也有增大航向稳定性的作用;机翼位置也对横向稳定型有影响。例如上单翼有利于提高横向稳定型。
作者签名:年月日
(学号):
飞机横航向稳定性分析
摘
飞机的稳定性是保证飞行安全的最基本要求,本文主要目的是对常规布局飞机的横航向稳定性进行分析,并利用Matlab编写程序来实现飞行器横航向稳定性分析;我们首先建立飞行器的运动学方程和动力学方程,得到飞行器正常飞行的力学模型,利用模型充分研究影响飞行器横航向稳定性的因素后,为了利用矩阵工具对方程进行求解,我们采用合理方法使飞行器运动方程线性化;线性化后我们发现飞机的横、纵向方程并不耦合,我们把飞机横向线性方程分离出来,并将其整理成矩阵形式,然后求出矩阵的特征值和特征向量,利用特征值与飞行模态的对应关系就可以确定飞机的稳定性
Key Words:Stability; Equations of motion; Modeling; Linearization
第一章 引 言
1.1
1.1.1
飞行器在正常飞行时,飞行器的平衡状态是所有作用在飞行器上的外力、外力矩之和全为零的状态。最一般的情况,如果飞行器做等速直线运动我们可称其处于平衡状态。
编号
毕业设计
题 目
飞机横航向稳定性分析
学生姓名
学 号
学 院
专 业
班 级
指导教师
二〇一六年六月
本科毕业设计(论文)诚信承诺书
本人郑重声明:所呈交的毕业设计(论文)(题目:)是本人在导师的指导下独立进行研究所取得的成果。尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。
关键词:稳定性,运动方程,建模,线性化
Aircraft lateral and directional stability Analysis System
Abstract
Thestability of the aircraft is the most basic requirements to ensure flight safety, the main purpose of this article is lateral and directional stability of the general layout of the aircraft for analysis and programming using Matlab to achieve the aircraft lateral and directional stability analysis; we first establish the kinematics of the aircraft equation and dynamic equation, the mechanical model of aircraft normal flight, the full study using the model aircraft after the impact factors of stability cross course, in order to take advantage of tools matrix equation is solved, we have adopted a reasonable approach enables linear equations of motion of the aircraft; linearization we found that the aircraft's horizontal and vertical coupling equation does not, we separated the plane transverse linear equations, and organized into a matrix, and then find the eigenvalues and eigenvectors using the eigenvalues and the corresponding flight modes relations can determine the stability of the aircraft
1.2
1.2.1
飞行器要正常飞行,不只要能产生足够的升力去平衡自身重力、发动机有足够的推力克服阻力以及良好的飞行性能,而且稳定性和操纵性必须比较好,这样才能在空中安全飞行。不然,飞行器的驾驶就会变得很困难,因为飞行器总是会偏离驾驶员预定的航向;或者当飞行器稍微受到比如突风、侧风、武器的发射等外界扰动,飞行器的平衡状态随即消失而又不能自动恢复,这种情况需要驾驶员花费很大的时间和精力去操纵机构改出不稳定状态。所以飞行器的稳定性系统分析,在现代飞行器设计阶段占愈来愈重要的作用。在飞行中,航向平衡状态由于飞行器受到微小扰动而使改变,在外界扰动消失时刻,不经驾驶员操纵飞行器,飞行器自身就有自动地把原来航向平衡状态恢复的趋势,则我们认为飞行器航向具有静稳定性。飞行器航向静稳定性的性质和风标对风的性质类似,所以我们也称航向静稳定性为风标静稳定性。垂直尾翼就是主要来保证飞行器的方向静稳定性的。
1.1.2
在飞行器的配平过程中,如果是由于飞机自身一些不可抗拒作用的因素(如单台发动机停车)造成的不平衡的力矩,驾驶员通过操纵面适当的偏舵就可以消除。但不仅仅是这些,飞行器在正常的飞行过程中,还常常会碰到例如垂直突风的扰动或者驾驶员偶尔不留神碰到驾驶杆或脚蹬等一些偶然的、突发的因素,这些无一例外也会使飞行器原本的平衡状态遭到破坏。并且由于在这种情况下飞行器运动参数会发生比较剧烈的变化,驾驶员难以完全控制,必然会影响到预定任务的完成和飞行的安全。因此为了飞行品质的考量,便对飞行器本身提出了稳定性的要求。
论文的第四章则是在第三章利用小扰动理论简化到的方程组的基础上,利用已经学习过的矩阵工具将方程组矩阵化,将飞行器稳定性问题分析转化为特征矩阵的求解分析,并对方程组的基本求解理论进行验证,并利用matlab软件中的数值分析工具进行了辅助工作。最后利用已经编写好的程序对某型号已经知道其气动数据的飞机稳定性进行分析了,得到了该程序应该的到的结果。
论文第一章从飞行器的平衡与配平开始,由圆弧轨道上的小球介绍了稳定性的由来以及稳定性பைடு நூலகம்析在现代飞行器设计中的重要性,并对常规布局飞行器中对飞行稳定性影响比较大的部件进行总体阐述。
本论文第二章一开始介绍了研究飞行器运动关系所必须需要的四种坐标系,并根据坐标系之间的定义关系推导出了各个坐标系之间的转换矩阵,这些准备工作完成后,本章先从飞行器的动力学方程开始,利用各种学习过的力学,物理知识推导出了飞行器质量中心移动,飞行器质量中心转动的相关动力学方程;然后接下来研究了飞行器的运动学方程,并根据力学知识推导出了飞行器质量中心运动学的方程、飞行器质量中心转动的运动学方程;以这些为基础,我们发现飞行器的质量中心运动是在航迹轴系上投影研究的,但绕质量中心转动的运动在机体轴系上投影研究得到相关方程的,故我们把得到的方程组称为航迹-机体体系运动方程组。
1.3
1.3.1
每架飞行器的稳定性是其复杂飞行性能评价中不可分割的一部分。飞行器的稳定性直接决定飞行器在空中的飞行安全。因此,我们最大的关注是在飞行器设计的早期阶段的稳定性的分析。保证飞行器飞行安全中极其重要的一个步骤就是分析关于飞行器的运动稳定性,国内和国外以前都发生过多起因为飞行器自身飞行运动不稳定或者飞行器进入受到扰动不稳定进而失速而导致失控的机毁人亡的事故。自从二十世纪飞行器问世以来,飞行器的飞行安全就一直是飞行器设计师们的最高准则,安全、稳定这项最高目标是飞行器的各项设计目标都必须要服从的指标,飞行器的横航向机动中的稳定性一直是飞行器飞行安全和战斗机安全高效完成任务的重要的影响因素。随着现代飞行器飞行速度越来越高,当飞行速度较高时,飞行器的气动力特性已表现出特别明显的非线性,难预料,留给驾驶员的反应时间越来越少,飞机操控难度显著提升,于是正常机动飞行过程中极易出现失速失控、自激震荡等等失去稳定性、不能控制的现象,从而引发严重的飞行事故。因此对飞行器的横向稳定性进行深入的研究是很有必要的。