基于单片机的无线遥控小车设计【文献综述】
基于单片机的无线遥控智能小车的设计与制作
2021.01科学技术创新基于单片机的无线遥控智能小车的设计与制作李建成王功刘春瑞(潍坊科技学院,山东潍坊262700)摘要:本文以单片机技术为原理,设计了一种无线遥控智能小车,系统分为手持设备和车体两部分。
在遥控模式下,小车可实现1.5km 范围内的无障碍运行,手持设备可显示小车的运行状态。
在自动模式下输入任何坐标,小车能准确达到预定位置。
经过系统测试后,小车功能完善,运行误差小。
关键词:单片机;无线遥控;智能小车;设计与制作中图分类号:TP242.6文献标识码:A 文章编号:2096-4390(2021)01-0169-02无线遥控小车的研发虽然起始于上世纪,但是其发展应用速度极快,已经在反恐、防爆、防核及防污染等技术上得到应用,其显著的特点为体积小、成本低,同时具有一定的应对恶劣环境的能力。
本文设计与制作的智能小车是基于单片机原理的无线遥控智能小车,设计体现的主要为其智能性,可在1.5km 范围内通过无线遥控器指挥其前进和后退,主要应用在火灾现场勘探、交通事故勘测以及危险气体现场检测上。
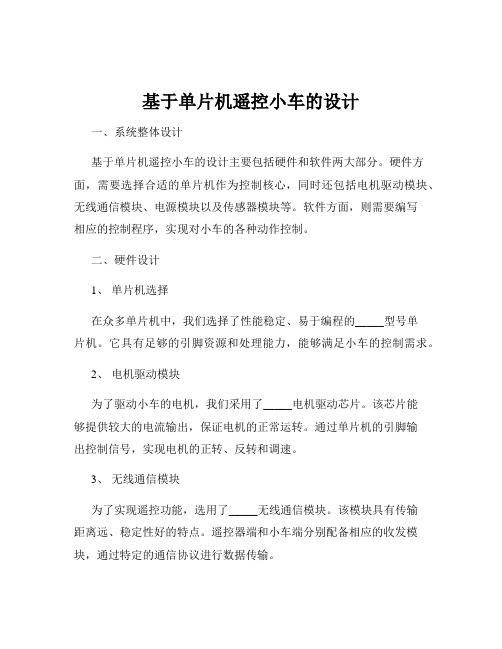
1无线遥控智能小车系统组成本文设计的无线智能遥控小车组成系统分为两部分,即手持设备与车体。
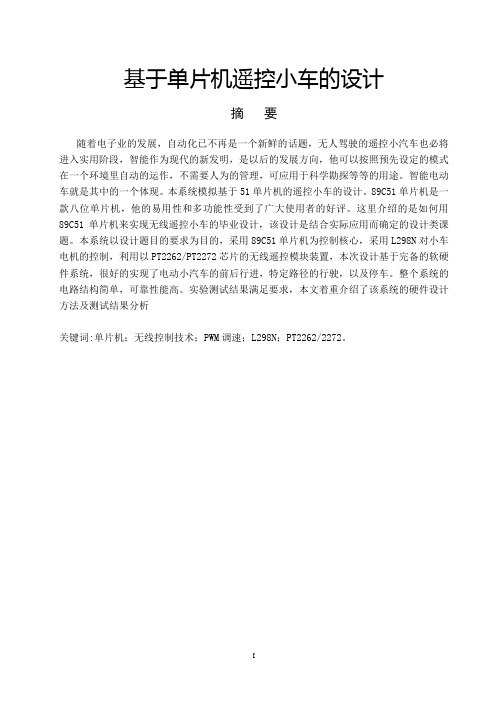
手持部分主要是遥控装置,包含了单片机模块、供电电路、显示模块、晶振电路、复位电路等,其系统的工作流程如下图1所示:图1手持设备设计流程图车体部分主要由无线管理模块、整体信息显示模块、测距管制模块、直流电动驱动模块以及小车障碍物检测模块组成,系统的工作流程如下图2所示:图2车体设备设计流程图2基于单片机的智能小车系统架构原理2.1智能系统采用无线管理模式无线智能模式是提高智能小车运动性的前提,在设计与制作中,优化了各个疏导节点,比如采用了双工交流模式与APC220模块对智能系统进行了优化,从而让指令与协调坐标的制作更加灵活和简单。
利用智能无线管理的模式,可以实现在固定波特率空间内对小车发送的无线数据进行传输,而且过渡交接的质量比较稳固,小车整个运动过程耗电量水平较低。
基于单片机遥控小车的设计
基于单片机遥控小车的设计一、系统整体设计基于单片机遥控小车的设计主要包括硬件和软件两大部分。
硬件方面,需要选择合适的单片机作为控制核心,同时还包括电机驱动模块、无线通信模块、电源模块以及传感器模块等。
软件方面,则需要编写相应的控制程序,实现对小车的各种动作控制。
二、硬件设计1、单片机选择在众多单片机中,我们选择了性能稳定、易于编程的_____型号单片机。
它具有足够的引脚资源和处理能力,能够满足小车的控制需求。
2、电机驱动模块为了驱动小车的电机,我们采用了_____电机驱动芯片。
该芯片能够提供较大的电流输出,保证电机的正常运转。
通过单片机的引脚输出控制信号,实现电机的正转、反转和调速。
3、无线通信模块为了实现遥控功能,选用了_____无线通信模块。
该模块具有传输距离远、稳定性好的特点。
遥控器端和小车端分别配备相应的收发模块,通过特定的通信协议进行数据传输。
4、电源模块电源模块为整个系统提供稳定的电力支持。
考虑到小车的移动性和电池的续航能力,我们选择了_____电池作为电源,并通过稳压芯片将电压转换为各个模块所需的工作电压。
5、传感器模块为了使小车能够感知周围环境,还可以添加一些传感器,如超声波传感器用于测距、红外传感器用于避障等。
三、软件设计1、编程语言使用_____编程语言进行程序编写,该语言具有语法简洁、可读性强的优点。
2、主程序流程主程序首先进行系统初始化,包括单片机引脚配置、通信模块初始化等。
然后进入循环,不断接收遥控器发送的指令,并根据指令控制电机的动作。
3、电机控制程序通过调整单片机输出的PWM信号的占空比,实现电机的调速。
同时,根据不同的指令,改变电机的转动方向。
4、无线通信程序制定了一套简单有效的通信协议,确保遥控器和小车之间的数据准确传输。
在接收端,对数据进行解析和校验,以保证指令的正确性。
四、调试与优化在完成硬件组装和软件编写后,需要对整个系统进行调试和优化。
首先,通过示波器等工具检测各个模块的工作电压和信号是否正常。
基于单片机遥控小车的设计
基于单片机遥控小车的设计摘要随着电子业的发展,自动化已不再是一个新鲜的话题,无人驾驶的遥控小汽车也必将进入实用阶段,智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。
智能电动车就是其中的一个体现。
本系统模拟基于51单片机的遥控小车的设计。
89C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评。
这里介绍的是如何用89C51单片机来实现无线遥控小车的毕业设计,该设计是结合实际应用而确定的设计类课题。
本系统以设计题目的要求为目的,采用89C51单片机为控制核心,采用L298N对小车电机的控制,利用以PT2262/PT2272芯片的无线遥控模块装置,本次设计基于完备的软硬件系统,很好的实现了电动小汽车的前后行进,特定路径的行驶,以及停车。
整个系统的电路结构简单,可靠性能高。
实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析关键词:单片机;无线控制技术;PWM调速;L298N;PT2262/2272。
The Design of Remote Control CarBased On MCUAbstractAlong with the development of electronic, automation is not a fresh word any more, and no-man controlled cars will be realized. The new invention of modern intelligence, is a future of development, he can follow the pattern set in advance in an environment where automatic operation, no human's management, used in scientific exploration and so on. Smart electric car is one of expression. That system is based on the design of 51 MCU controlled car. 89C51 MCU is eight-figure microcontroller, which receives high praise from the users because of its easy use and versatility. This graduation design introduces how 89C51 MCU realize the remote control of the car, a combination of the practical application and design. This system designs for the purpose of the topic request, using 89C51 MCU as control core, the car motor control by L298N,and wireless remote control which chip PT2262/2272 device, with the electric car, driving, and the particular path park. The whole system of the circuit structure is simple and reliable. This paper introduces the hardware design method of the system and the analysis of the test results.Keyword: MCU; Wireless Remote Control; PWM speed adjusting;L298N;PT2262/2272目录1 前言 (4)2 方案设计与论证 (6)2.1直流调速系统 (6)2.2无线控制系统 (7)2.3系统原理图 (8)3 硬件设计与实现 (10)3.189C51单片机硬件结构 (10)3.1.1 一个8位的微处理器(CPU) (11)3.1.2 存储器 (11)3.1.3 I/O接口 (12)3.1.4 定时器/计数器 (12)3.1.5 五个中断源的中断控制系统 (12)3.1.6振荡器及定时电路 (13)3.289C51单片机引脚及其功能 (13)3.2.1 电源引脚Vcc和Vss (14)3.2.2 时钟电路引脚XTAL1和XTAL2 (14)3.2.3 控制信号引脚RST,ALE,/PSEN和/EA (15)3.2.4 输入/输出端口P0,P1,P2和P3 (15)3.3系统运动控制部分设计 (16)3.3.1 电机选型 (16)3.3.2 L298N驱动电机 (17)3.4无线电发射接收模块介绍 (20)3.551单片机的最小应用系统设计 (24)3.6PWM调速系统 (26)4 软件设计 (29)5 测试数据、测试结果分析及结论 (31)致谢...................................................... 错误!未定义书签。
基于单片机遥控小车的设计

摘要随着电子业的发展,自动化已不再是一个新鲜的话题,无人驾驶的遥控小汽车也必将进入实用阶段,智能作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。
智能电动车就是其中的一个体现。
本系统模拟基于51单片机的遥控小车的设计。
89C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评。
这里介绍的是如何用89C51单片机来实现无线遥控小车的毕业设计,该设计是结合实际应用而确定的设计类课题。
本系统以设计题目的要求为目的,采用89C51单片机为控制核心,采用L298N对小车电机的控制,利用以PT2262/PT2272芯片的无线遥控模块装置,本次设计基于完备的软硬件系统,很好的实现了电动小汽车的前后行进,特定路径的行驶,以及停车。
整个系统的电路结构简单,可靠性能高。
实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析关键词:单片机;无线控制技术;PWM调速;L298N;PT2262/2272。
The Design of Remote Control Car BasedOn MCUAbstractAlong with the development of electronic, automation is not a fresh word any more, and no-man controlled cars will be realized. The new invention of modern intelligence, is a future of development, he can follow the pattern set in advance in an environment where automatic operation, no human's management, used in scientific exploration and so on. Smart electric car is one of expression. That system is based on the design of 51 MCU controlled car. 89C51 MCU is eight-figure microcontroller, which receives high praise from the users because of its easy use and versatility. This graduation design introduces how 89C51 MCU realize the remote control of the car, a combination of the practical application and design. This system designs for the purpose of the topic request, using 89C51 MCU as control core, the car motor control by L298N,and wireless remote control which chip PT2262/2272 device, with the electric car, driving, and the particular path park. The whole system of the circuit structure is simple and reliable. This paper introduces the hardware design method of the system and the analysis of the test results.Keyword: MCU; Wireless Remote Control; PWM speed adjusting;L298N;PT2262/2272目录1 前言 (4)2 方案设计与论证 (6)2.1直流调速系统 (6)2.2无线控制系统 (7)2.3系统原理图 (8)3 硬件设计与实现 (10)3.189C51单片机硬件结构 (10)3.1.1 一个8位的微处理器(CPU) (11)3.1.2 存储器 (11)3.1.3 I/O接口 (12)3.1.4 定时器/计数器 (12)3.1.5 五个中断源的中断控制系统 (12)3.1.6振荡器及定时电路 (13)3.289C51单片机引脚及其功能 (13)3.2.1 电源引脚Vcc和Vss (14)3.2.2 时钟电路引脚XTAL1和XTAL2 (14)3.2.3 控制信号引脚RST,ALE,/PSEN和/EA (15)3.2.4 输入/输出端口P0,P1,P2和P3 (15)3.3系统运动控制部分设计 (16)3.3.1 电机选型 (16)3.3.2 L298N驱动电机 (17)3.4无线电发射接收模块介绍 (20)3.551单片机的最小应用系统设计 (24)3.6PWM调速系统 (26)4 软件设计 (29)5 测试数据、测试结果分析及结论 (31)致谢..................................................... 错误!未定义书签。
基于STC15单片机的无线遥控智能小车的设计

基于STC15单片机的无线遥控智能小车的设计朱嵘涛;徐爱钧;叶传涛【期刊名称】《电脑知识与技术》【年(卷),期】2014(000)014【摘要】该文设计的智能小车主要由MCU主控模块、无线通信模块、电机驱动电路、红外避障模块和电源模块组成。
通过无线通信模块遥控小车,实现前进、后退、转弯和刹车等基本功能,并利用红外避障模块探测障碍物,实现小车的自动避障。
经测试该系统电路结构简单,稳定性高。
%In this paper,the smart car consists of MCU master control module,wireless communication module,motor driver mod⁃ule,infrared obstacle avoidance module and Power supply module.The car is controlled through the wireless communication mod⁃ule to achieve forward,backward,turning,braking and other basic functi ons.What’s more,infrared obstacle avoidance module are equipped to detect obstacles,so that the car could avoid obstacles automatically.The test has proved that the system has advantage of install simple and high reliability.【总页数】3页(P3445-3447)【作者】朱嵘涛;徐爱钧;叶传涛【作者单位】长江大学工程技术学院信息系,湖北荆州434020;长江大学,湖北荆州434020;川庆测井公司,重庆400021【正文语种】中文【中图分类】TP242【相关文献】1.基于单片机的无线遥控智能小车设计 [J], 李彬;阳妮2.基于PIC16F877A单片机的无线遥控智能小车设计与实现 [J], 陆振先;王倩3.基于单片机的无线遥控智能小车的设计与制作 [J], 马维维;4.基于单片机的无线遥控智能小车的设计与制作 [J], 李建成;王功喆;刘春瑞5.基于单片机的无线遥控智能小车的设计与制作 [J], 李建成;王功;刘春瑞因版权原因,仅展示原文概要,查看原文内容请购买。
基于51单片机红外无线遥控智能小车控制设计

基于51单片机红外无线遥控智能小车控制设计摘要:本文利用51单片机设计了一款具有红外无线遥控功能的智能小车控制系统。
该系统基于红外技术,实现了对智能小车的远程控制。
通过建立遥控信号传输模型和小车控制模块,实现了智能小车的实时运动控制,包括前进、后退、左转、右转等操作。
本文详细介绍了系统设计方案、硬件设计和软件设计,通过实验验证,证明该系统能够稳定地实现智能小车的远程控制,具有一定的应用价值和推广前景。
关键词:51单片机;红外无线遥控;智能小车控制;遥控信号传输模型Abstract:In this paper, a smart car control system with infrared wireless remote control function based on 51 single-chip microcomputer is designed. The system is based on infrared technology, which realizes the remote control of the smart car. By establishing the remote control signal transmission model and the car control module, real-time motion control of the smart car, including forward, backward, turning left and turning right, is realized. This paper introduces the system design scheme, hardware design and software design in detail. Through experiments, it is proved that the system can stably realize the remote control of the smart car, and has certain application value and promotion prospects.Keywords:51 single-chip microcomputer; infrared wireless remote control; smart car control; remote control signaltransmission model1. 引言智能小车控制系统是一种目前比较受关注的智能化系统,在智能出行和智慧交通中有着广泛的应用。
基于单片机无线遥控小车设计英文范文

基于单片机无线遥控小车设计英文范文Design of Wireless Remote Control Car Based on Single Chip Microcomputer。
With the rapid development of technology, the application of single-chip microcomputers in various fields has become more and more extensive. One of the most interesting applications is the design of a wireless remote control car based on a single-chip microcomputer. In this article, we will discuss the design and implementation of such a car.The main components of the wireless remote control car include a single-chip microcomputer, motor driver, wireless communication module, and various sensors. The single-chip microcomputer serves as the brain of the car, controlling its movement and receiving commands from the remote control. The motor driver is used to control the speed and direction of the car, while the wireless communication module enables communication between the remote control and the car. Sensors such as ultrasonic sensors and infrared sensors can be used to detect obstacles and avoid collisions.The design of the wireless remote control car begins with the selection of the single-chip microcomputer. The microcontroller should have sufficient processing power and I/O ports to control the motors, communicate wirelessly, and interface with sensors. Popular choices for single-chip microcontrollers include the Arduino, Raspberry Pi, and STM32.Once the microcontroller is selected, the next step is to design the motor control circuit. This circuit typically consists of H-bridge motor drivers, which allow the microcontroller to control the speed and direction of the motors. The motors themselves can be DC motors or servo motors, depending on the requirements of the car.After the motor control circuit is designed and tested, the wireless communication module is integrated into the system. This module can be based on technologies such as Bluetooth, Wi-Fi, or RF. The remote control is equipped with a similar wireless module, allowing the user to send commands to the car.In addition to motor control and wireless communication, sensors are an important part of the wireless remote control car. Ultrasonic sensors can be used to measure the distance to obstacles in front of the car, while infrared sensors can detect obstacles on the sides or rear of the car. These sensors provide input to the microcontroller, allowing the car to navigate and avoid collisions autonomously.Once all the components are integrated, the software for the wireless remote control car is developed. This software includes the control algorithm for the motors, the communication protocol between the remote control and the car, and the obstacle avoidance logic based on sensor input. The software is typically written in C or C++, and can be developed using the Arduino IDE, Raspberry Pi IDE, or other integrated development environments.After the hardware and software are developed, the wireless remote control car is assembled and tested. The car should be able to move in all directions, respond to commands from the remote control, and avoid obstacles using the sensors. Any issues or bugs in the design are identified and fixed during the testing phase.In conclusion, the design of a wireless remote control car based on a single-chip microcomputer is a challenging and rewarding project. By carefully selecting components, designing circuits, integrating sensors, and developing software, it is possible to create a fully functional remote control car that can navigate and avoid obstacles wirelessly. This project is a great way to learn about electronics, programming, and robotics, and can be a fun and educational experience for hobbyists and students alike.。
基于单片机智能遥控小车的设计
基于单片机智能遥控小车的设计现今的智能遥控小车在各个领域都有广泛的应用,如家庭娱乐、安防巡检、仓库物流等。
在这篇文章中,我们将讨论基于单片机的智能遥控小车的设计。
首先,我们需要选择适合的单片机作为主控制器。
目前市面上最常用的单片机有Arduino、Raspberry Pi等。
Arduino是一种开源电子原型平台,其特点是体积小巧、易于编程。
Raspberry Pi是一款基于ARM架构的微型计算机,具有与PC相似的性能。
在选择单片机时,我们需要考虑到所需功能的复杂度,并根据需求选择适合的处理器。
接下来,我们需要设计小车的底盘。
底盘一般由两个驱动电机和轮子组成,可以使用直流电机或步进电机。
直流电机通常用于需要更高速度和功率的应用,而步进电机适用于需要更精确运动和控制的应用。
在选择电机时,我们需要考虑小车的负载能力和运动需求,并选择合适的电机类型。
为了实现遥控功能,我们需要添加无线通信模块。
常见的无线通信模块有蓝牙、Wi-Fi和红外线模块等。
蓝牙模块可以实现长距离通信和高速传输,适用于需要远程操控的应用。
Wi-Fi模块可以实现无线网络连接和上传数据,适用于需要实时监控和远程控制的应用。
红外线模块可以实现近距离通信和简单的遥控功能,适用于低成本和简单的应用。
在设计电路时,我们需要考虑电源管理和传感器的接入。
智能遥控小车通常需要稳定的电源供应,可以使用电池,或将电源直接接入插座。
在接入电源时,我们需要添加合适的电压调节器和电流保护模块,以确保电路的安全运行。
此外,我们还可以添加各种传感器,如超声波传感器、红外线传感器和摄像头等,以实现遥测和环境感知功能。
软件方面,我们需要为单片机编写应用程序。
根据单片机的选择,我们可以使用相应的编程语言和集成开发环境。
Arduino通常使用C/C++编程语言和Arduino开发环境,Raspberry Pi可以使用Python和Linux操作系统。
在编写程序时,我们需要实现与无线通信模块的通信,控制电机和传感器的运行,以及处理接收到的指令。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业论文文献综述
机械设计制造及其自动化
基于单片机的无线遥控小车设计
1、 国内外研究现状
无线电遥控是利用无线电信号来对远方的各种机构进行控制的技术,这些信号
被远方的接收设备接收后,可以指令或驱动其它各种相应的机械,去完成各种操
作,已经广泛运用于机械领域,不但提高机械的自动化程度和操作性,还改善了
操作人员的工作环境啊。并且与我们的生活也越来越接近,比如遥控门窗,遥控
风扇、遥控座椅、遥控小车等都是无线电技术的成功应用于生活的例子。
2、研究主要成果
智能小车,也称轮式机器人,是一种以汽车电子为背景,涵盖控制、模式识别、
传感技术、电子、电气、计算机、机械等多学科的科技创意性设计。从普通的玩具遥
控车到无限工业控制车辆,从短程控制到外太空探险小车的控制,可以预见今后无线
智能遥控小车的应用将更加广泛。在最近几年,随科学技术的进步,智能化和自动化
技术的普及,各种高科技广泛应用于玩具制造领域,使其娱乐性和互动性不断提高。
根据美国玩具协会的调查统计,近年来全球玩具销量增幅与全球平均GDP增幅大致相
当。而全球玩具市场的内在结构比重却发生了重大变化:传统玩具的市场比重在逐步
缩水,高科技含量的电子玩具则蒸蒸日上。美国玩具市场的高科技电子玩具的年销售
额2004年较2003年增长52%,而传统玩具的年销售额仅增长3%。英国玩具零售商协
会选出的2001年圣诞最受欢迎的十大玩具中,在七款玩具配有电子元件。从这些数字
可以看出,高科技含量的电子互动式玩具已经成为玩具行业发展的主流。普通的无线
遥控车大家都很熟悉,市场里有很多提供小孩子玩玩的遥控小车,还有神奇的天堂电
玩WII。
3、发展趋势
无论是简单的还是难的,熟悉的还是不熟悉的,智能无线遥控小车最基本的功能
就是无线控制和启动两方面,在这个基础上,可以再加上更多的复杂功能,比如:
① 测速:由单片机定时器根据高低电平计数脉冲与车轮周长通过算法得出车速,
再根据车速和行驶时间得出行驶里程。
② 红外避障:红外发射管通过三极管和电阻接到一从单片机的PB口,红外接受
管的数据口接到它的PC口,当检测到有障碍物时,接受管的数据口输出为低电平并送
从单片机,若未检测到障碍物袁则接受管的数据口输出为高电平,另外,单片机控制
红外发射管发射红外光采用的是断续式,即可定时发射或关闭发射袁,若一直让红外
发射管发射,则接受管接受到的电平一直为高电平,相当于接受管没有正常工作。这
样,采取断续式控制方式可以彻底地避免环境干扰。在组装实物时,可以分别在车体
的四个角上安置一组红外发射—接收管,这样不管在前进、转弯或倒退中都能检测到
障碍物,这样的配置能为智能寻迹的设计打下基础。
③ 液晶显示:用液晶显示小车的行驶时间、速度和里程。
④ 声光报警:在小车的电机应用上为防止蹩车而使电机被烧坏,采用运算放大器
应用中的电压比较器的功能,在蹩车时电压的变化使发光二极管工作,发光二极管形
成光信号报警,再配合蜂鸣器实现声音报警,以提示操作者。
4、存在问题
目前无线智能小车普遍存在的问题主要有以下几个方面:
①遥控距离的限制。目前小车的遥控范围在150米内,抗干扰性弱,在实际应用
中受到限制。建议用射频技术作为无线通信的设备,此技术具有抗干扰能力强、传输
距离远、信号穿透能力强、成本比较低、信号的传输方向自由可靠等优点。
②电池能源问题。目前许多小车采用的是8节1.5V干电池,显然这无法满足现实
需要,若采用蓄电池则考虑到体积问题,若采用锂电池则要考虑成本问题,目前市场
上比较成熟的小车价格都比较昂贵。
③要对快速行驶中的小车实施控制并不是一个简单的自动控制问题,它涉及到了
机械学、力学、光学、电磁学等方面的知识,市场上很多小车在实际应用中环境适应
能力不够强。
本课题主要任务是设计并制作一套智能无线遥控小车,该系统基于AT89S52单片
机,采用编码解码芯片PT2262/PT2272发送接收操作命令,利用电机驱动控制芯片
L298N,输出两路不同的PWM波控制小车速度和方向,从而实现小车的无线遥控行使
的基本功能。PT2272是PT2262的配对芯片,其外围电气特性和PT262相同。工作
时,PT2272自动对从DIN端口输入的编码波形进行解码,解码成功则将地址和数据输
出到对应的地址引脚和数据引脚,同时将EN端口置为高电平,数据在各个引脚上的
排列顺序和PT2262完全桢。和无线发送模块相对应,这里也只使用其低八位数据引脚
传输八位有效数据。车体结构采用从市场购买的三轮结构,前面两个车轮是驱动轮,
由电机控制,调节小车的前进或倒退方向。后面的万向轮则起到平衡的作用。采用这
种控制方式可以方便地实现电机的正反转
和转速变化。这样的智能小车效果显著且使电路简单化,直流电动机也具有优良的调
速特性,调速平滑、方便,调整范围广,过载能力强,能承受频繁的冲击负载,还可
以实现频繁的无线快速启动和反转等优点。
参考文献
[1] 周立功.单片机实验与实践[J].北京:北京航空航天大学出版社.2004.9
[2] 赵晓安.MCS-51单片机原理及应用[J]. 天津:天津大学出版社.2001.3
[3] 胡寿松.自动控制原理[J].北京.科技出版社.2007.
[4] 马忠梅等编著.单片机的C语言应用程序设计[J]. 北京:北京航空航天大学出版
社.2007.1
[5] 徐惠民,安德宁.单片微型计算机原理接口与应用[J].第1版.北京:北京邮电大学出版
社.1996
[6] 符意得.陆阳.嵌入式系统原理及接口技术[J].北京.清华大学出版社.2007.10
[7] 夏继强.单片机实验与实践教程[J]. 北京:北京航空航天大学出版社.2001
[8] 肖洪兵.跟我学用单片机[J]. 北京:北京航空航天大学出版社.2002.8
[9] Kenichi Mabuchi et al .Radio motor control systems.US patent:4168468,179-9-18
[10] Vizimuller, P.: ‘RF design guide-systems, circuits, and equations’ (ArtechHouse, Boston,
MA, 1995)