模式识别课matlab数字识别程序
matlab标准数据集验证算法

matlab标准数据集验证算法MATLAB是一种功能强大的数值计算和科学编程软件,广泛应用于各个领域的数据分析和算法验证。
在机器学习和模式识别领域,MATLAB提供了许多标准数据集,用于验证和评估各种算法的性能。
本文将介绍如何使用MATLAB标准数据集来验证算法。
首先,我们需要了解MATLAB提供的一些常用标准数据集。
MATLAB中有许多经典的数据集,如鸢尾花数据集(Iris)、手写数字数据集(MNIST)、波士顿房价数据集(Boston Housing)等。
这些数据集都是经过精心筛选和处理的,可以用于不同类型的机器学习和模式识别任务。
接下来,我们需要加载所需的标准数据集。
在MATLAB中,可以使用内置函数或从外部文件加载数据集。
例如,要加载鸢尾花数据集,可以使用以下代码:```matlab\nload fisheriris\n```加载完成后,可以通过查看变量`fisheriris`来获取该数据集的详细信息。
然后,我们可以将加载的数据集分为训练集和测试集。
通常情况下,我们将大部分样本用于训练算法,并将剩余样本用于测试算法性能。
在MATLAB中,可以使用`cvpartition`函数将数据集划分为训练集和测试集。
例如,将鸢尾花数据集划分为70%的训练集和30%的测试集,可以使用以下代码:```matlab\nc =cvpartition(species,'Holdout',0.3);\ntrainIdx = training(c);\ntestIdx = test(c);\n```然后,我们可以使用训练集来训练算法,并使用测试集来评估算法的性能。
在MATLAB中,有许多内置的机器学习和模式识别算法可以使用,如支持向量机(SVM)、K近邻(KNN)、决策树(Decision Tree)等。
我们可以根据具体任务选择适当的算法,并使用训练集进行模型训练。
例如,使用支持向量机算法对鸢尾花数据集进行分类:```matlab\nsvmModel =fitcsvm(meas(trainIdx,:),species(trainIdx));\n```最后,我们可以使用测试集来评估算法的性能。
(完整版)基于matlab的车牌识别(含子程序)
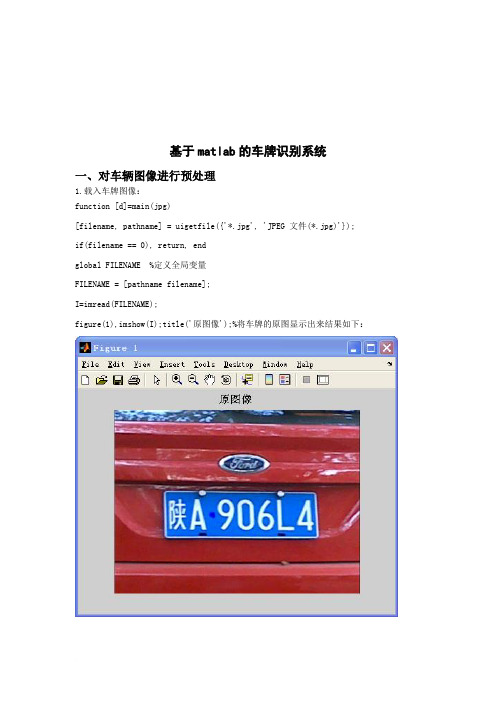
基于matlab的车牌识别系统一、对车辆图像进行预处理1.载入车牌图像:function [d]=main(jpg)[filename, pathname] = uigetfile({'*.jpg', 'JPEG 文件(*.jpg)'});if(filename == 0), return, endglobal FILENAME %定义全局变量FILENAME = [pathname filename];I=imread(FILENAME);figure(1),imshow(I);title('原图像');%将车牌的原图显示出来结果如下:2.将彩图转换为灰度图并绘制直方图:I1=rgb2gray(I);%将彩图转换为灰度图figure(2),subplot(1,2,1),imshow(I1);title('灰度图像');figure(2),subplot(1,2,2),imhist(I1);title('灰度图直方图');%绘制灰度图的直方图结果如下所示:3. 用roberts算子进行边缘检测:I2=edge(I1,'roberts',0.18,'both');%选择阈值0.18,用roberts算子进行边缘检测figure(3),imshow(I2);title('roberts 算子边缘检测图像');结果如下:4.图像实施腐蚀操作:se=[1;1;1];I3=imerode(I2,se);%对图像实施腐蚀操作,即膨胀的反操作figure(4),imshow(I3);title('腐蚀后图像');5.平滑图像se=strel('rectangle',[25,25]);%构造结构元素以正方形构造一个seI4=imclose(I3,se);% 图像聚类、填充图像figure(5),imshow(I4);title('平滑图像');结果如下所示:6. 删除二值图像的小对象I5=bwareaopen(I4,2000);% 去除聚团灰度值小于2000的部分figure(6),imshow(I5);title('从对象中移除小的对象');结果如下所示:二、车牌定位[y,x,z]=size(I5);%返回I5各维的尺寸,存储在x,y,z中myI=double(I5);%将I5转换成双精度tic %tic表示计时的开始,toc表示计时的结束Blue_y=zeros(y,1);%产生一个y*1的零阵for i=1:yfor j=1:xif(myI(i,j,1)==1)%如果myI(i,j,1)即myI的图像中坐标为(i,j)的点值为1,即该点为车牌背景颜色蓝色 %则Blue_y(i,1)的值加1Blue_y(i,1)= Blue_y(i,1)+1;%蓝色像素点统计endendend[temp MaxY]=max(Blue_y);%Y方向车牌区域确定%temp为向量white_y的元素中的最大值,MaxY为该值的索引PY1=MaxY;while ((Blue_y(PY1,1)>=5)&&(PY1>1))PY1=PY1-1;endPY2=MaxY;while ((Blue_y(PY2,1)>=5)&&(PY2<y))PY2=PY2+1;endIY=I(PY1:PY2,:,:);%x方向车牌区域确定%%%%%% X方向 %%%%%%%%%Blue_x=zeros(1,x);%进一步确定x方向的车牌区域for j=1:xfor i=PY1:PY2if(myI(i,j,1)==1)Blue_x(1,j)= Blue_x(1,j)+1; endendendPX1=1;while ((Blue_x(1,PX1)<3)&&(PX1<x))PX1=PX1+1;endPX2=x;while ((Blue_x(1,PX2)<3)&&(PX2>PX1))PX2=PX2-1;endPX1=PX1-1;%对车牌区域的校正PX2=PX2+1;dw=I(PY1:PY2-8,PX1:PX2,:);t=toc;figure(7),subplot(1,2,1),imshow(IY),title('行方向合理区域');%行方向车牌区域确定figure(7),subplot(1,2,2),imshow(dw),title('定位裁剪后的车牌彩色图像');的车牌区域如下所示:三、字符分割及处理1.车牌的进一步处理对分割出的彩色车牌图像进行灰度转换、二值化、均值滤波、腐蚀膨胀以及字符分割以从车牌图像中分离出组成车牌号码的单个字符图像,对分割出来的字符进行预处理(二值化、归一化),然后分析提取,对分割出的字符图像进行识别给出文本形式的车牌号码。
利用Matlab神经网络工具箱在VC++.net中进行手写体数字识别

Ab t a t A meh d i + . e a r s n e sr c : t o n VC + n tw s p e e td.wh c s c ri d o t t t b e gn al g te i h i a r u h Ma l n i e c l n e wi a i h f n t n r vd d b t b n u a ew r o l o .h a d r t n d gt lr c g i o s i l - u c i s p o i e y Mal e r l n t o k t ob xT e h n w t ii e o n t n wa mp e o a i e a i me td w t h d a tg s o h o ru n e a e p o r mmi g c p b l y i n e i t e a v n a e f t e p we l i tr c r g a h f f n a a i t n VC+ n ta d t e i +.e n h f n t n d ai g w t o l a e r b e t b t r g a i t r c iey i + .e n t b u ci e l i c mp i t d p o l msi Ma l p o m e a t l VC +n t d Mal . o n h c n a o r n v n a a Ke r s C+ . e ;n u a ewo k;Mal b e gn y wo d :V + n t e r ln t r t n i e;h n w t n d gt l e o n t n a a d r t ii c g i o i e a r i
利用Matlab进行系统辨识的技术方法

利用Matlab进行系统辨识的技术方法在Matlab中进行系统辨识的技术方法主要有参数估计法和非参数估计法两种。
1.参数估计法:参数估计法是通过拟合已知输入和输出数据的数学模型来估计系统的参数。
常用的参数估计方法包括最小二乘法(OLS)、最小二乘法(LSE)、最小二乘法(MLE)和极大似然估计法(MLE)等。
a) 最小二乘法(OLS):OLS方法通过最小化实际输出与模型预测输出之间的误差平方和来估计系统参数。
在Matlab中,可以使用lsqcurvefit函数来实现最小二乘法的系统辨识。
b) 最小二乘法(LSE):LSE方法是通过最小化实际输出与模型预测输出之间的误差平方和来估计系统参数。
在Matlab中,可以使用lsqnonlin函数来实现最小二乘法的系统辨识。
c) 最小二乘法(MLE):MLE方法是通过最大化似然函数来估计系统参数。
在Matlab中,可以使用mle函数来实现最大似然估计法的系统辨识。
2.非参数估计法:非参数估计法不需要事先指定系统的数学模型,而是直接根据输入和输出数据的统计特性进行系统辨识。
常用的非参数估计方法包括频域方法、时域方法和时频域方法等。
a) 频域方法:频域方法通过对输入和输出数据进行频谱分析来估计系统的频率响应。
常用的频域方法包括傅里叶变换、功率谱密度估计和频率响应函数估计等。
在Matlab中,可以使用fft函数和pwelch函数来实现频域方法的系统辨识。
b) 时域方法:时域方法通过对输入和输出数据进行时间序列分析来估计系统的时域特性。
常用的时域方法包括自相关函数估计和互相关函数估计等。
在Matlab中,可以使用xcorr函数来实现时域方法的系统辨识。
c) 时频域方法:时频域方法结合了频域方法和时域方法的优势,可以同时估计系统的频率响应和时域特性。
常用的时频域方法包括短时傅里叶变换和小波变换等。
在Matlab中,可以使用spectrogram函数和cwt函数来实现时频域方法的系统辨识。
Matlab系统辨识尝试之详细过程1

Matlab系统辨识尝试之详细过程1前面介绍了Matlab系统辨识工具箱的一些用法,这里拿一个直观的例子来尝试工具箱的具体用法。
比较长,给个简单目录吧:1.辨识的准备2.辨识数据结构的构造3.GUI辨识4.辨识效果5.对固有频率的辨识6.结构化辨识7.灰箱辨识8.加入kalman滤波的灰箱辨识1.辨识的准备在辨识前,首先要根据自己辨识的情况,确定要辨识的状态空间模型的一些特点,如连续还是离散的;有无直通分量(即从输入直通到输出的分量);输入延迟;初始状态等。
了解了这些情况就可以更快速的配置辨识时的一些设置选项。
2.辨识数据结构的构造使用原始数据构造iddata结构:data=iddata(y,u,Ts);这里以一个弹簧质量系统的仿真为例代码如下,其中用到了函数MDOFSolve,这在之前的博文介绍过(/?p=183),拿来用即可。
如果发现运行有错误,可以将MDOFSolve函数开头的一句omega2=real(eval(omega2));注释掉。
%弹簧质量系统建模clcclearclose allm=200;k=980*1000;c=1.5*1000;m1=1*m;m2=1.5*m;k1=1*k;k2=2*k;k3=k1;%%由振动力学知识求固有频率M=[m10;0m2];K=[k1+k2-k2;-k2k3+k2];[omega,phi,phin]=MDOFSolve(M,K);fprintf('固有频率:%fHz\n',subs(omega/2/pi));%%转化到状态空间innum=2;outnum=2;statenum=4;A=[0100;-(k1+k2)/m10k2/m10;0001;k2/m20-(k3+k2)/m20];B=[00;1/m10;00;01/m2];C=[1000;0010];D=zeros(outnum,innum);K=zeros(statenum,innum);mcon=idss(A,B,C,D,K,'Ts',0);%连续时间模型figureimpulse(mcon)%%信号仿真,构造数据供辨识n=511;%输入信号长度Ts=0.001;t=0:Ts:(n-1)*Ts;u1=idinput(n,'prbs');%输入1为伪随机信号u2=zeros(n,1);%输入2为空u=[u1u2];simdat=iddata([],u,Ts);%形成输入数据对象e=randn(n,2)*1e-7;simopt=simOptions('AddNoise',true,'NoiseData',e);%添加噪声yn=sim(mcon,simdat,simopt);%加噪声仿真y=sim(mcon,simdat);%无噪声仿真figurefor i=1:outnumsubplot(outnum,1,i)plot(t,y.OutputData(:,i))hold onplot(t,yn.OutputData(:,i),'r')axis tighttitle(sprintf('输出%d',i))legend({'无噪声仿真','含噪声仿真'})end%保存输入输出数据,供后续辨识data=iddata(y.OutputData,simdat.InputData,Ts);datan=iddata(yn.OutputData,simdat.InputData,Ts);运行后,变量data中保存了无噪声的系统仿真输入输出数据,datan中为含噪声的仿真数据。
变分模态提取 vme的matlab代码

变分模态提取是一种用于信号处理和模式识别的有效方法,它可以从给定的数据中提取出最主要的模态信息。
在实际应用中,变分模态提取(VME)已被广泛应用于图像处理、语音识别、人脸识别等领域。
本文将介绍VME的原理,并给出相应的Matlab代码示例。
一、变分模态提取的原理变分模态提取是基于变分贝叶斯方法的一种信号处理技术,它旨在从给定数据中提取出最主要的模态信息。
其基本原理是通过最大化似然函数来确定信号的模态参数,从而实现对信号的模态分解和重构。
在VME中,信号被建模为一组模态函数的线性组合,而模态参数则是通过最大后验概率来估计得到。
通过这种方式,VME可以有效地提取出信号中的重要模态信息,从而实现对信号的降维和压缩。
二、VME的Matlab代码示例下面是一个简单的VME的Matlab代码示例,用于对给定的信号进行模态分解和重构。
```matlab生成示例信号t = 0:0.01:2*pi; 时间范围x = sin(t) + 0.5*sin(2*t) + 0.3*cos(3*t); 信号设置VME参数num_modes = 3; 模态数量num_iter = 100; 迭代次数初始化模态参数a = rand(1, num_modes); 初始模态参数VME主循环for k = 1:num_iter计算似然函数L = -sum((x - sum(a.*sin((1:num_modes).*t))).^2);更新模态参数dL_da = -2*(x -sum(a.*sin((1:num_modes).*t)))*sin((1:num_modes).*t)';a = a - 0.1*dL_da; 一阶梯度下降打印迭代信息fprintf('Iteration d: Likelihood = .4f\n', k, L);end信号重构x_reconstruct = sum(a.*sin((1:num_modes).*t));绘图figure;subplot(2, 1, 1);plot(t, x, 'r', t, x_reconstruct, 'b--');xlabel('t');ylabel('x');legend('Original', 'Reconstructed');subplot(2, 1, 2);stem(1:num_modes, a);xlabel('Mode');ylabel('Amplitude');```以上代码首先生成一个示例信号,然后通过VME算法对信号进行模态分解和重构。
matlab程序解读

解读MATLAB 程序需要了解MATLAB 的基本语法和常用函数,以及程序中使用的数据类型和算法。
以下是一些解读MATLAB 程序的步骤:
1. 查看程序的文件名和所在路径,了解程序的基本信息和位置。
2. 查看程序中的注释,了解程序的功能和目的。
3. 查看程序中的变量和数据类型,了解程序处理的数据和使用的算法。
4. 查看程序中的函数和语句,了解程序的执行流程和实现细节。
5. 运行程序并查看输出结果,了解程序的正确性和精度。
例如,下面是一个简单的MATLAB 程序,用于计算两个数的和:
```matlab
% This program adds two numbers
x = 3; % first number
y = 4; % second number
z = x + y; % sum of x and y
fprintf('The sum of %d and %d is %d\n', x, y, z); % print the sum
```
这个程序的功能是将两个数相加并输出结果。
其中`x` 和`y` 是
输入变量,`z` 是输出变量。
`fprintf` 函数用于输出结果。
在程序中使用了`%d` 来表示整数,`\n` 表示换行。
运行程序会得到如下输出:
```
The sum of 3 and 4 is 7
```
通过解读这个程序,可以了解到MATLAB 的基本语法和常用函数,以及如何使用它们来执行简单的数学运算和输出结果。
如何在MATLAB中进行系统辨识

如何在MATLAB中进行系统辨识引言:在系统辨识中,我们通常会使用数据来推导出系统的数学模型,进而对系统进行建模和预测。
MATLAB作为一种强大的数值计算和分析工具,提供了丰富的系统辨识工具包,能够帮助我们实现这一目标。
本文将介绍如何使用MATLAB进行系统辨识,包括数据预处理、模型选择、参数估计等内容。
一、数据预处理系统辨识的第一步是数据预处理,即对采集到的数据进行处理和清洗,以提高后续建模和分析的准确性。
常见的数据预处理技术包括去除异常值、平滑数据、采样率调整等。
在MATLAB中,我们可以使用一系列内置的函数和工具箱来完成这些任务。
例如,使用"findoutliers"函数可以检测并去除异常值,使用"smoothdata"函数可以平滑数据,使用"resample"函数可以进行采样率调整等。
二、模型选择在系统辨识中,我们需要选择适合的数学模型来描述系统的行为。
常用的系统模型包括线性模型、非线性模型、时变模型等。
在MATLAB中,我们可以使用"sysident"工具箱中的函数来进行模型选择。
其中最常用的方法是ARX模型和ARMAX模型。
ARX模型适用于仅包含输入和输出的线性系统辨识,而ARMAX 模型适用于包含自回归项和移动平均项的线性系统辨识。
根据实际情况和需求,选择适合的模型进行建模。
三、参数估计参数估计是系统辨识中的关键步骤,其目的是通过观测数据来估计系统模型中的参数。
在MATLAB中,我们可以使用"arx"和"armax"函数进行参数估计。
这些函数将原始观测数据作为输入,并根据选择的模型类型进行系统参数的估计。
具体的参数估计方法包括最小二乘法、极大似然法、递推最小二乘法等。
根据系统模型和实际需求,选择合适的参数估计方法进行系统参数的估计。
四、模型验证模型验证是系统辨识中的重要环节,其目的是验证建立的系统模型是否能够准确地描述观测数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
名 称: 模式识别
题 目: 数字‘3’和‘4’的识别
实验目的与要求:
利用已知的数字样本(3和4),提取样本特征,并确定分类准则,在用测试样本对分类确
定准则的错误率进行分析。进一步加深对模式识别方法的理解,强化利用计算机实现模式识
别。
实验原理:
1.特征提取原理:
利用MATLAN 软件把图片变为一个二维矩阵,然后对该矩阵进行二值化处理。由于“3”
的下半部分在横轴上的投影比“4”的下半部分在横轴上的投影宽,所以可以统计‘3’‘4’
在横轴上投影的‘1’的个数作为一个特征。又由于‘4’中间纵向比‘3’的中间‘1’的个
数多,所以可以统计‘4’和‘3’中间区域‘1’的个数作为另外一个特征,又考虑‘4’的
纵向可能会有点偏,所以在统计一的个数的时候,取的范围稍微大点,但不能太大。
2.分类准则原理:
利用最近邻对测试样本进行分类
实验步骤
1.利用MATLAN 软件把前30个图片变为一个二维矩阵,然后对该矩阵进行二值化处理。
2.利用上述矩阵生成特征向量
3.利用MATLAN 软件把后5个图片变为一个二维矩阵,然后对该矩阵进行二值化处理。
4.对测试样本进行分类,用F矩阵表示结果,如果是‘1’表示分类正确,‘0’表示分类错
误。
5.对分类错误率分析
实验原始程序:
f=zeros(5,2)
w=zeros(35,2)
q=zeros(35,2)
for i=1:35
filename_1='D:\MATLAB6p5\toolbox\images\imdemos\3\'
filename_2='.bmp'
a= num2str (i)
b=strcat(filename_1,a)
c=strcat(b,filename_2)
d=imread(c)
e=im2bw(d)
n=0
for u=1:20
m=0
for t=32:36
if(e(t,u)==0)
m=m+1
end
end
if(m<5)
n=n+1
end
end
w(i,1)=n
n=0
for u=1:36
for t=10:18
n=n+e(u,t)
end
end
w(i,2)=n
filename_1='D:\MATLAB6p5\toolbox\images\imdemos\4\'
filename_2='.bmp'
a= num2str(i)
b=strcat(filename_1,a)
c=strcat(b,filename_2)
d=imread(c)
e=im2bw(d)
n=0
for u=1:20
m=0
for t=32:36
if(e(t,u)==0)
m=m+1
end
end
if(m<5)
n=n+1
end
end
q(i,1)=n
n=0
for u=1:36
for t=10:18
n=n+e(u,t)
end
end
q(i,2)=n
end
z=zeros(5,2)
x=zeros(5,2)
for i=1:5
filename_1='D:\MATLAB6p5\toolbox\images\imdemos\3\'
filename_2='.bmp'
a= num2str (i+35)
b=strcat(filename_1,a)
c=strcat(b,filename_2)
d=imread(c)
e=im2bw(d)
n=0
for u=1:20
m=0
for t=32:36
if(e(t,u)==0)
m=m+1
end
end
if(m<5)
n=n+1
end
end
z(i,1)=n
n=0
for u=1:36
for t=10:18
n=n+e(u,t)
end
end
z(i,2)=n
filename_1='D:\MATLAB6p5\toolbox\images\imdemos\4\'
filename_2='.bmp'
a= num2str (i)
b=strcat(filename_1,a)
c=strcat(b,filename_2)
d=imread(c)
e=im2bw(d)
n=0
for u=1:20
m=0
for t=32:36
if(e(t,u)==0)
m=m+1
end
end
if(m<5)
n=n+1
end
end
x(i,1)=n
n=0
for u=1:36
for t=10:18
n=n+e(u,t)
end
end
x(i,2)=n
end
d1=10000*ones(5,2)
d2=10000*ones(5,2)
for i=1:5
for j=1:35
a=(w(j,1)-z(i,1))*(w(j,1)-z(i,1))+(w(j,2)-z(i,2))*(w(j,2)-z(i,2))
b=(q(j,1)-z(i,1))*(q(j,1)-z(i,1))+(q(j,2)-z(i,2))*(q(j,2)-z(i,2))
if(a
end
if(b
end
end
if(d1(i,1)
end
for j=1:35
c=(w(j,1)-x(i,1))*(w(j,1)-x(i,1))+(w(j,2)-x(i,2))*(w(j,2)-x(i,2))
d=(q(j,1)-x(i,1))*(q(j,1)-x(i,1))+(q(j,2)-x(i,2))*(q(j,2)-x(i,2))
if(d2(i,1)>c)
d2(i,1)=c
end
if(d2(i,2)>d)
d2(i,2)=d
end
end
if(d2(i,1)>d2(i,2))
f(i,2)=1
End
End
实验结果:
错误率为0.1,符合要求。
心得体会:
通过本次实验,使我们对模式识别有了更进一步的理解,并基本掌握了用计算机实现简单的
模式识别,达到了实验目的。