电机规格参数及曲线图
VID29步进电机规格书

脉冲序列
1
2
3
4
5
6
1
2
+5V
34
5
线圈电压 0
-5V
一个全步
一个周期
一个分步
一个微步
脉冲细分
©2006 伟力驱动技术(深圳)有限公司 邮箱: @ | 网址: /
极限参数
型号:VID29-XX/XXP 版本:2
分步驱动模式脉冲序列
比特图
引脚 1
引 脚 2,3
引脚 4
脉冲序列
1 23 456 123 45 1 0 1 0 1 0
线 圈 电 压 UL 0
顺 时 针 ( VID29_××P) 逆 时 针 (VID29_××)
逆 时 针 (VID29_××P) 顺 时 针 (VID29_××)
1
4
UL
UR
2
3
VID29_××P
湿度储存试验
- 温度: 65℃±2℃ - 湿度:95±2%RH - 保存时间:144 Hrs - 电机状态: 无运行 - 参考标准: IEC68-2-3
高温运行试验
- 温度:+105℃±2℃ - 保存时间:168 Hrs - 电机状态:运行 -参考标准: IEC60068-2-2
低温试验
- 温度:-40℃±2℃ - 保存时间:48 Hrs - 电机状态:运行 - 参考标准: IEC60068-2-1
150 70 12 1000
N N N Rad/s2
Unit: Unm.
噪音特性:微步模式,MAX工作电压Ub=4.2V
Unit: dB.
©2006 伟力驱动技术(深圳)有限公司 邮箱: @ | 网址: /
Step6 Step5 Step4
步进电机——步进电机选型的计算方法

步进电机——步进电机选型的计算方法步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
◎驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o 步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]=必要脉冲数[脉冲]定位时间[秒](2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒]驱动脉冲速度[Hz]=定位时间[秒]-加/减速时间[秒]◎电机力矩的简单计算示例必要的电机力矩=(负载力矩+加/减速力矩)×安全系数●负载力矩的计算(TL)负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
风机类型特性及性能曲线

式中:
VP——动压;
ρ —— 气体的密度; υ —— 气流速度。
507 出风口尺寸
出 风
口
速
度
由上图选型,可知
气体的密度ρ =1.225, 风机出风口处的风速υ =11.67, 动压VP=0.5 × ρ × υ 2=83.42 Pa
风机性能参数—全压
定义:全压是静压和动压的代数和。 全压代表 l m3气体所具有的总能量。 若以大气压为计算的起点,它可以是 正值,亦可以是负值。
阻尼弹簧减振器(ZTE型) 阻尼弹簧减震器特性: 本体材质分为普通铸铁及球磨铸铁 球状铸铁本体经热浸镀锌处理,耐 侯性佳。 特殊结构设计,可依实际须要调整 高度。 外型轻巧坚固,按装容易,适用于 各类机械内减振装置。 弹簧均经热处理、ED防锈、烤漆等 程序处理。 荷重挠度20mm、40mm能有效消除 机械结构振动。 底部止滑橡胶,安装容易及安全性 高、 控制及调整水平容易,能有效消除 地板振动,价格也较便宜。
风机-管道系统
工况点:
∆Pt , Pa
新风机性能曲线
New system curve
新管道系统曲线 指风机性能曲线及
总
New fan performance curve
管道系统曲线相交
压 力
风机性能曲线
Fan performance curve
的点
差
System curve
∆PS
S
管道系统曲线
∆PQ
减震系统
弹簧(风机355以上)
弹簧是一种利用弹性来工作的机械零件。一般用 弹簧钢制成。用控制机件的运动,缓和冲击或震动, 贮蓄能量,测量力的大小等.
弹簧在受载时能产生较大的弹性变形,把机械功或 动能转化为变形能,而卸载后弹簧的变化消失并回 复原状,将变形能转化为机械功或动能.
42步进电机力矩不够怎么办?
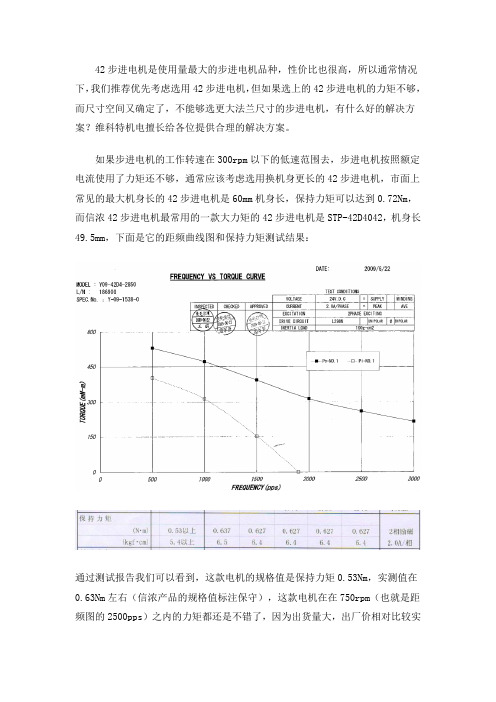
42步进电机是使用量最大的步进电机品种,性价比也很高,所以通常情况下,我们推荐优先考虑选用42步进电机,但如果选上的42步进电机的力矩不够,而尺寸空间又确定了,不能够选更大法兰尺寸的步进电机,有什么好的解决方案?维科特机电擅长给各位提供合理的解决方案。
如果步进电机的工作转速在300rpm以下的低速范围去,步进电机按照额定电流使用了力矩还不够,通常应该考虑选用换机身更长的42步进电机,市面上常见的最大机身长的42步进电机是60mm机身长,保持力矩可以达到0.72Nm,而信浓42步进电机最常用的一款大力矩的42步进电机是STP-42D4042,机身长49.5mm,下面是它的距频曲线图和保持力矩测试结果:通过测试报告我们可以看到,这款电机的规格值是保持力矩0.53Nm,实测值在0.63Nm左右(信浓产品的规格值标注保守),这款电机在在750rpm(也就是距频图的2500pps)之内的力矩都还是不错了,因为出货量大,出厂价相对比较实惠,性价比高,可以优先选用。
但STP-42D4042力矩还是不够的话,再考虑60mm 机身长的42步进电机,但信浓没有这种机身长的42步进电机,可以选用维科特品牌的加长机身长的42步进电机。
如果42步进电机在比较高的速度下的力矩不够,可以考虑3个方面进行提高改进:选用电感小、电流大的步进电机;提高驱动电压;选用机身更长的42步进电机。
如果机身长度不变,只改变电感参数的匹配方案可以解决问题的话,通常是成本最低,最容易实现的解决方案。
提高驱动电压会提高电源功耗和成本,还看和系统电压是不是兼容,而加大机身长一般是成本最高的解决方案。
如果负载很大,即使选用60mm机身长的42步进电机力矩也不够,但空间尺寸有不允许选用57步进电机等这种更大尺寸的步进电机,怎么办?维科特机电可以给您提供薄型42减速步进电机来解决。
其中一款减速步进电机的尺寸图如下:这款机身长58.8mm的42减速步进电机保持力矩2.7Nm,比57步进电机力矩更大,如果需要尺寸更薄的42减速步进电机,可以做到机身长47.5mm保持力矩1.5Nm,就是一般42步进电机的机身长度。
两相步进电机详细参数及接线图
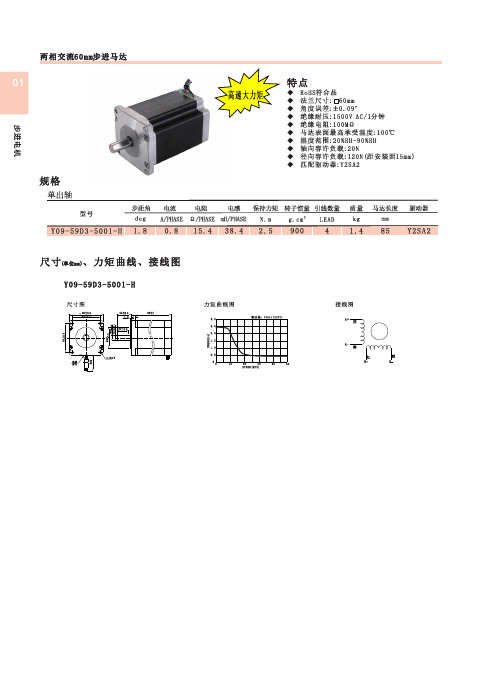
特点◆ 径向容许负载:90N(距安装面15mm)◆ RoHS 符合品◆ 安装孔距:47.14mm◆ 绝缘电阻:100MΩ◆ 匹配驱动器:Y2SD2◆ 马达表面最高承受温度:100℃◆ 湿度范围:20%RH-90%RH◆ 绝缘耐压:500V AC /1分钟◆ 角度误差:±0.09°◆ 轴向容许负载:20N◆ 法兰尺寸:□60mm规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-棕橙红黄01020304000.20.40.60.81.01.2SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2标配连接线:长度300min力矩曲线0510152000.51.01.52.02.53.0SPEED(RPS)T O R Q U E (N .m )2524V 36V 48V 驱动器:Y2SD2接线图010********.30.60.91.21.51.8SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2Y09-59D3-1305-PY09-59D3-3305-P Y09-59D3-5001-P0.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)24V 24V 24V 48V 48V 48V 60V 60V 60V 驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)◆ 绝缘耐压:1500V AC /1分钟特点◆ 绝缘电阻:100MΩ◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:60N◆ 径向容许负载:320N(距安装面20mm)◆ 湿度范围:20%RH-90%RH◆ RoHS 符合品◆ 匹配驱动器:Y2SD3 or Y2SA2◆ 法兰尺寸:□86mm◆ 角度误差:±0.09°规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器力矩曲线000555101010151515202020000T T T O O O R R R Q Q Q U U U E E E (((N N N ...m m m )))252525并联直流驱动型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm2g.cm 驱动器串联交流驱动Y09-59D3-7430-PY09-59D3-7536-P Y09-59D3-7655-P102030400.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)50驱动器:Y2SA2(220VAC,串联3A)驱动器:Y2SA2(220VAC ,串联3A)驱动器:Y2SA2(220VAC ,串联3A)00055101015152020000T T T OO O RR R QQ Q U U U EE E (((NN N ...mm m )))2525接线图A+A-A+A-B+B-黑绿红蓝黄橙白棕并联接线串联接线Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P。
伺服电机

1 永磁式直流伺服电机在一个运动控制系统中,电机主要的功能在于提供旋转所需要的扭矩,以便加速旋转而达到所需的转速,但来自于电机本身与负载的一些物理特性却会限制其加速能力,例如电机本身的转子惯量、负载的惯量、磨擦力、温升的限制等等。
电机产生扭矩的大小主要决定于交互作用磁场的大小,而线圈电流则决定了所产生磁场的强度,因此控制流经电机的线圈电流即为控制电机所产生扭矩的主要关键。
线圈电阻(winding resistance)所产生的I2R损失会造成电机温度的升高,因而限制了线圈电流的额定值。
电机旋转时会产生反抗电动势,限制电流的上升,功率放大器的输出电压与电流亦有其额定值与峰值的限制,因此对电机的加速能力、最高转速与额定输出扭矩也就造成了限制。
同时对永磁式直流电机而言,由于去磁效应的考虑也须限制流经电机的电流。
图2 永磁式直流电机电枢线圈的等效电路图图2为一永磁式直流伺服电机电枢线圈(armature winding)的等效电路模型,其中反电势(back emf) v emf是由永久磁铁所产生的磁场与电枢线圈两者相对运动所产生的感应电压,大小与转速成正比:(6)其中 为角速度,K E为反电势常数。
由图9可知电枢线圈的基本方程式为:(7)i a为电枢电流。
永磁式直流伺服电机的电枢电流因为换向器(commutator)的设计使得电枢线圈所形成的磁场能与定子磁铁所形成的磁场保持垂直的关系而产生最大的扭矩,其扭矩方程式(torque equation)为:(8)其中T e为电机所产生的扭矩,K T为扭矩常数。
值得注意的是在MKS制时,。
当施以一直流电压于电机,在稳态时,因电流趋于定值,而可将(7)式简化为(9)图3 电机与负载的机械等效电路图大写字母表示其稳态的直流成份。
通常电机的电气时间常数(electrical time constant) τe= L a/R a远小于其机械时间常数 (mechanical time constant) τm,因此在分析其稳态额定状况时常加以忽略。
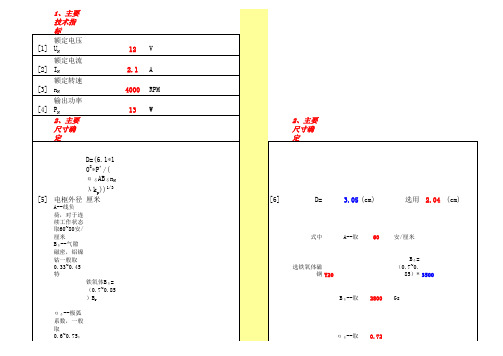
直流电机设计参数计算
(A) Fj1=Lj1Hj1
#REF! #REF! #REF! #REF! #REF! #REF! #REF!
F0=Fδ +Fj1+Fj2+ (A) Ft2
φm=σφ (Mx) δ
磁铁平均 [43] 磁路长LM
瓦形和环 形铁氧体 磁铁
#REF! #REF! #REF! #REF! #REF! #REF! #REF!
Bt2=t2lδ Bδ (Gs) /bt2l2kFe (A/c m) Ht2
Ft2=2ht2H (A) t2
9197.45 9963.907 10730.4 11496.8 12263.3 13030 13796.18 14562.633 15329.09 16095.5 16862 14102.76 #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF! #REF!
kp=sin(y1 π/2τ)
η--效率 P'--视在功 率
η=PN/UNIN P'=(1+2* η)pN/3η
电枢计算
[6] 长度lδ
(厘
lδ=λD 3、定子 尺寸
米)
机壳外径 [7] Dj1
Dj1= (1.4~1. 7)D
(厘米)
Dj1应与标 准外径符 合,或Dj1 值由用户 给出。
机壳厚度 [8] Δj1
(安) (厘 米)
(Gs)
定子轭磁
[39] 场强度Hj1
(安/厘
Hj1
86BYG二相混合式步进电机参数

小体积,高转矩,低振动
绝缘电阻——500VDC 100MΩ Min 轴向间隙——0.1~0.3mm 径向跳动——0.02mm Max 温 升——65K Max 绝缘强度——750VAC 1Min 环境温度—— -20℃ ~ +50℃ 绝缘等级——B 级
技术数据
货物 编码
1.7 2.0 1540 1 a
000200 86BYG250A-SAFRBL-0402 2 0.9/1.8 4 0.43 2.3 2.5 0.2
1.7 2.0 1540 1 b
000220 86BYG250B-SAFRBC-0202 2 0.9/1.8 2 2.6 16.0 5.0 0.2
1.7 3.2 3000 1 a
86BYG P5
产品与服务
运动控制电机及驱动
步进电机系统 两相/三相/五相电机系列 电机外径范围:28 mm~130 mm 电机转矩范围:0.06 N.m~45 N.m 驱动器工作电压范围:24VDC~70VDC 100VAC~220VAC 驱动器输出电流范围:0.9A~8A 驱动器励磁方式:整步~64 细分
C:引线,两相 8 线
M:公制
B:英制
H:特殊尺寸
R:圆形
S:方形
F:铣扁
S:光轴
A:标准
B:加长
S:单
B:双
50:50 齿 2:两相 BYG:混合式
86BYG P2
86BYG
[注] 标准接线方式对应于电机绕阻 串联接法 高速接线方式对应于电机绕阻 并联接法
86BYG P3
外形尺寸
[单位:mm]
图 1 86BYG250x – SAFRBx - xxxx