陈文宇有限自动机作业参考答案发布
陈文宇有限自动机作业参考答案发布
(11) | ∈ 0,1 且如果 以 1 结尾,则长度为偶数源自如果 以 0 结尾,则长度 为奇数
5 第 3 章 有限状态自动机
有限自动机理论习题参考答案
2016
(12) | 是十进制非负实数
(13) ∅ (14) ε
3.2 构造接收下列语言的 NFA。
(1) | ∈ 0,1 且 中不含形如 00 的子串
0,1 00,01,10,11 ∗ 0 1 00 01 10 11 ∗
(7) 所有包含子串 01011 的串形成的语言。
0,1 ∗01011 0,1 ∗
(8) 所有包含 3 个连续 0 的串形成的语言。
0,1 ∗000 0,1 ∗
(9) 所有正数第 10 个字符是 0 的串形成的语言。
0,1 0 0,1 ∗
② 删除第一个 c,左巡删除最近 b 或 a < begin, c, l_del, !, L> < l_del, !, l_del, !, L> < l_del, $, l_del, $, L> < l_del, #, l_del, #, L> < l_del, b, r_del, $, R> < l_del, a, r_del, #, R>
<match, , ,match, >
5.2 构造单态的 PDA 接收语言
Z 表示 A, B, 为顶的栈 <read,a,A,match,AZ> <read,b,B,match,BZ> <read,C,A,match,A> <read,C,B,match,B> <read,a,A,match, > <read,b,B,match, > <read, , ,match, >
有限自动机在自动控制软件分析中的应用

间隔单 元 )和控 制 系统交 换信 息 。使 用 这 种协 议 ,在 变电站 和厂 站 中 ,不同 的 继 电保 护设备 ( 或者 间隔 单元 )和 控制
参考艾馘l 毒
。| l
… 王柏 , 杨娟 ,形 式语 言 与 自动机『 M ] . 北 京 :北 京 邮 电 大 学 出版 社 . 2 0 0 5 [ 2 ] 陈文 宇 , 形 式语 言 与 自动机 [ M ] .成 者 I
赵丽敏 .女 .在读 硕士 .讲 师 ,德州学 院计 算机 系教师 ,主要 研究方 向 :数据库技术 及
示 。其 中,S为 各个状 态和 f为各种转换
条件 。
上接 第 1 2 6页
程序 设计 卜 的分支和循环这两个最卞婴的 序结 构 。这种 处理 方法使 得整 个软 什 设计过 程思路 清晰 ,设 计 } H 的程 序也 符 合结 构化 f r l ' - . 的原 则 。
镣巷 食 。鼍 l l l l _ _ l l l
应 用
。 0 l
行设 计分 析时 ,采 用 了形式语 言 与自动
机的相关技术 ,通过 对整个 I EC6 0 8 7 0 5 l 0 3 规 约 研 究 ,用状 态 转 换 图即 有 限 自 动机描 述主站和子站通讯的流程如下图所
首先把上面得到的有限 自动机进行确 定化 ,然 后进 行 自动机 的化 简 ,对每 个 状 态结点所做 的工作编写 一 段程序实现 , 各 段 程 序 之 间 的转 移 由 一 个 “ 判 别状 态” 来实现 ,构成程 序 的分 支 。用程 序 设 计语 言 灾现 上面 的有限 自动 机 。在 本 项 目的程 序设 计中 ,主 要有 “ 遥 信 、遥 测 、遥 控 、遥 调 ” 等 功 能 ,按 照此 方 完全掌握 这个 易用的数据库访 问工具 。
自动化作业 答案.docx

6、图为某列管式蒸汽加热器控制流程图。
试分别说明图中PI-307、TRC-303、FRC-305所代表的意义。
PI-307表示就地安装的压力指示仪表,工段号为3,仪表序号为07;TRC-303表示集中仪表盘安装的,具有指示记录功能的温度控制仪表;工段号为3,仪表序号为03;FRC-305表示集中仪表盘安装的,具有指示记录功能的流量控制仪表;工段号为3,仪表序号为05。
11、图所示为一反应器温度控制系统示意图。
A、B两种物料进入反应器进行反应,通过改变进入夹套的冷却水流量来控制反应器内的温度不变。
试画出该温度控制系统的方块图,并指出该系统中的被控对象、被控变量、操纵变量及可能影响被控变量的干扰是什么?该温度控制系统的方块图扰动反应器温度控制系统方块图其中,被控对象:反应器;被控变量:反应器内的温度;操纵变量:冷却水流量。
可能影响被控变量的干扰因素主要有A、B两种物料的温度、进料量,冷却水的压力、温度,环境温度的高低等。
21、某化学反应器工艺规定操作温度为(900±10)°C。
考虑安全因素,控制过程中温度偏离给定值最大不得超过80°Co现设计的温度定值控制系统,在最大阶跃干扰作用下的过渡过程曲线如题1-19图所示。
试求该系统的过渡过程品质指标:最大偏差、超调量、衰减比、余差、振荡周期和过渡时间(被控温度进入新稳态值的±1 % (即900x (±1%) =±9°C)的时间),并回答该控制系统能否满足题中所给的工艺要求?题1-19图温度控制系统过渡过程曲线解最大偏差4=950-900=50 (°C);超调量3=950-908=42 (°C);由于B'=918-908=10 (°C),所以,衰减比”=3疗=42:10=4.2;余差C=908-900=8°C ;振荡周期T=45-9=36(min);过渡时间L=47min。
《自动控制理论》作业集参考答案(专本科函授)第一部分.
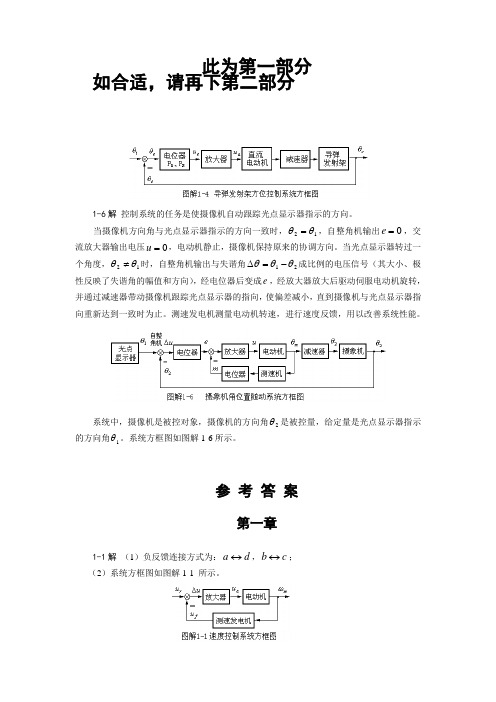
此为第一部分如合适,请再下第二部分1-6解 控制系统的任务是使摄像机自动跟踪光点显示器指示的方向。
当摄像机方向角与光点显示器指示的方向一致时,12θθ=,自整角机输出0=e ,交流放大器输出电压0=u ,电动机静止,摄像机保持原来的协调方向。
当光点显示器转过一个角度,12θθ≠时,自整角机输出与失谐角21θθθ-=∆成比例的电压信号(其大小、极性反映了失谐角的幅值和方向),经电位器后变成e ,经放大器放大后驱动伺服电动机旋转,并通过减速器带动摄像机跟踪光点显示器的指向,使偏差减小,直到摄像机与光点显示器指向重新达到一致时为止。
测速发电机测量电动机转速,进行速度反馈,用以改善系统性能。
系统中,摄像机是被控对象,摄像机的方向角2θ是被控量,给定量是光点显示器指示的方向角1θ。
系统方框图如图解1-6所示。
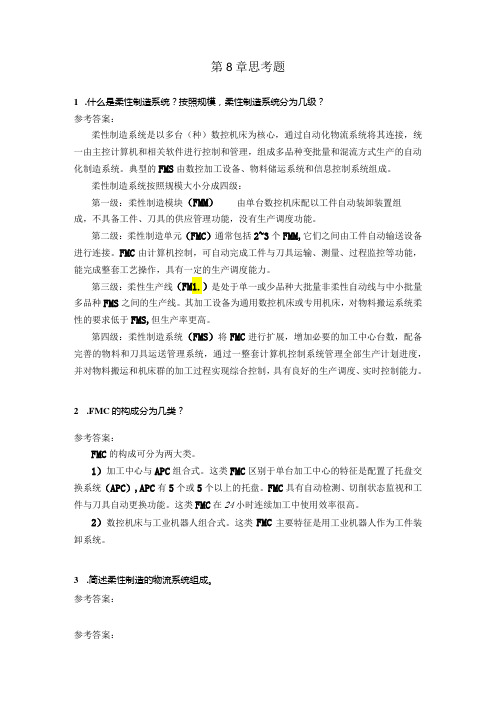
参 考 答 案第一章1-1解 (1)负反馈连接方式为:d a ↔,c b ↔; (2)系统方框图如图解1-1 所示。
1-3解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程:控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。
智能数控机床与编程 思考题及答案 第8章 柔性制造应用
第8章思考题1.什么是柔性制造系统?按照规模,柔性制造系统分为几级?参考答案:柔性制造系统是以多台(种)数控机床为核心,通过自动化物流系统将其连接,统一由主控计算机和相关软件进行控制和管理,组成多品种变批量和混流方式生产的自动化制造系统。
典型的FMS由数控加工设备、物料储运系统和信息控制系统组成。
柔性制造系统按照规模大小分成四级:第一级:柔性制造模块(FMM)由单台数控机床配以工件自动装卸装置组成,不具备工件、刀具的供应管理功能,没有生产调度功能。
第二级:柔性制造单元(FMC)通常包括2~3个FMM,它们之间由工件自动输送设备进行连接。
FMC由计算机控制,可自动完成工件与刀具运输、测量、过程监控等功能,能完成整套工艺操作,具有一定的生产调度能力。
第三级:柔性生产线(FM1.)是处于单一或少品种大批量非柔性自动线与中小批量多品种FMS之间的生产线。
其加工设备为通用数控机床或专用机床,对物料搬运系统柔性的要求低于FMS,但生产率更高。
第四级:柔性制造系统(FMS)将FMC进行扩展,增加必要的加工中心台数,配备完善的物料和刀具运送管理系统,通过一整套计算机控制系统管理全部生产计划进度,并对物料搬运和机床群的加工过程实现综合控制,具有良好的生产调度、实时控制能力。
2.FMC的构成分为几类?参考答案:FMC的构成可分为两大类。
1)加工中心与APC组合式。
这类FMC区别于单台加工中心的特征是配置了托盘交换系统(APC),APC有5个或5个以上的托盘。
FMC具有自动检测、切削状态监视和工件与刀具自动更换功能。
这类FMC在24小时连续加工中使用效率很高。
2)数控机床与工业机器人组合式。
这类FMC主要特征是用工业机器人作为工件装卸系统。
3.简述柔性制造的物流系统组成。
参考答案:参考答案:物流系统是柔性制造的重要分系统,承担物料(毛坯、半成品、成品及工具等)的存储、输送和分配,其组成主要包括三个方面:原材料、半成品、成品所构成的工件流;刀具、夹具所构成的工具流;托盘、辅助材料、备件等所构成的配套流。
自动检测技术及应用课后习题答案(有大题)
11题:参考例题1-4。
9题:1、系统;2、系统;3、系统;4、系统;5、系统+随机; 6、系统;7、随机;8、系统;9、系统+随机;10、随机。
10题:1、系统误差; 2、随机误差; 3、粗大误差。
偏差特别大 弹着点接近正态分布 弹着点均偏向右上侧 10题:下图是射击弹着点示意图,请你分别说出图a、b、c各是什么原因造成的,应如何克服?
判定数字仪表位数的两条原则
能显示0~9所有数字的“位”是“整位”;
分数位的判定:在最大显示值中,以最高位所能显示的数值作为分子,用满量程的最高位作为分母。 例如:当某一数字表最大显示值为±1999(不考虑小数点),满量程计数值为±2000时,则它共有3个整位。最高位只能显示1,满量程最高位为2,所以它是3½位表。
8.汽车、自行车速度及里程的测量
出租车计价器外形 电动助动车仪表盘外形 工业或汽车中经常需要测量运动部件的转速、直线速度及累计行程等参数。现以大家都较熟悉的自行车的车速及累计公里数测量为例…… 与车轮联动 可参考汽车速度的测量原理
观察自行车的结构可知,车速及公里数与车轮的直径及转速成正比,因此应将注意力集中到自行车的前、后轮上。设车轮的直径为D(m),则周长l =πD,车轮转动的圈数即为自行车行驶距离的基本参数。若转动圈数为N,则累计路程L=N l =NπD ;若每分钟转动的圈数为n(n=N/t圈/分钟)则车速v=60nl/1000(km/h) =0.06 n πD(km/h) 。
7题: (课堂讲解)。
8题:1、 可知:P=160mW;输出电压增加。 2、 0~24V 3、 4、 可知:Rx=3000Ω;UO=12V。
10题:(略)。
4题:1、查表知:α=0.00385。 2、Rt=100(1+0.00385×50)=119.25Ω。 3、查表知:Rt(50)=119.40Ω。 4、∆R=0.15 Ω;(0.15/119.40)×100%=0.126%。
有限自动机ATM机状态转换
有限自动机ATM机状态转换0引言有限自动机源于20世纪40年代,是一种用于研究离散事件动态系统的数学模型,1943年麦克卡赛(McCulloch)与皮特斯(Pitts)建立了模拟神经网络的自动机。
1956年莫尔(Moore)建立了描述计算机的时序机的概念。
此后,自动机理论迅速发展,与计算机技术密切结合,在人工智能、自动控制等领域有广泛应用。
有限自动机是计算机科学的重要基石,它可以用来研究时序线路与计算机的构造,是计算机硬件的理论基础。
由于计算机中的数以二进制形式表示,所以计算机基本的加法器功能可以用有限自动机来实现。
计算机的操作系统在信息处理进程中需要一定资源。
在不同资源条件下,进程处于不同的状态。
进程活动中要不断提出申请资源和归还资源的请求,这些请求与进程的状态和资源的条件有关。
操作系统的这些活动体现了一个有限自动机的功能特征,因此操作系统的信息处理过程可以用有限自动机来刻画。
1 ATM机状态分析ATM机是当前银行较为常用的一种用户自助操作的机器,它是以实时操作系统软件基础实现的强实时系统。
ATM机具有事务的基本特性,即:原子性、一致性、隔离性、持久性。
其中,原子性保证了事务的操作是一个完整的过程,要么做,要么不做;一致性:保证事务从一个一致性状态转换到另外一个一致性状态,此特性与原子性密切相关;隔离性:即一个事务的执行不被其他事务所干扰,各事务之间执行互不干扰;持久性:即一个事务一旦提交,它对数据库中的数据改变就是永久性的。
从插卡到某个动作操作成功为一个原子操作,要么成功,提交事务,更新数据库;要么失败,退回到插卡前的操作,数据库中数据仍为原来的数据,不发生改变。
本文从ATM机的基本状态出发来讨论ATM机中的状态迁移。
ATM机的基本状态包含了插卡,输入密码,余额查询,取款,存款,转账,退出这几个基本状态。
其中初始阶段为等待插卡阶段,此阶段等待磁卡的插入;插入以后则系统状态变为插卡状态,此状态判断插入的磁卡是否有效,有效则跳转到输入密码状态,系统状态变为登录状态,此时可以根据需要进行查询、取款、存款、转账等状态的转换;若输入密码错误则继续保持插卡状态等待正确的用户密码;查询状态,直接查询账户余额;取款状态,输入取款金额,此状态需要判断取款金额是否大于账户余额,若大于,则操作失败,返回取款前的状态,若小于,则操作成功,提交事务,更新数据库数据;存款状态,判断放入的钱币是否有假钞和放入钱币的金额,若有假钞,退回到存入之前的操作直到放入的钱币全部为真,清点放入金额,提交事务,更新数据库数据。
《机电一体化系统设计基础》作业1、2、3、4参考答案
《机电一体化系统设计基础》作业1、2、3、4参考答案形成性考核作业1一、判断题(正确的打√,错误的打×)1.机电一体化系统的主要功能就是对输入的物质按照要求进行处理,输出具有所需特性的物质。
(×)2.系统论、信息论、控制论是机电一体化技术的理论基础,是机电一体化技术的方法论。
(√)3.信息处理技术是指在机电一体化产品工作过程中,与工作过程各种参数和状态以及自动控制有关的信息输入、识别、变换、运算、存储、输出和决策分析等技术。
(√)4.自动控制是在人直接参与的情况下,通过控制器使被控对象或过程自动地按照预定的规律运行。
(×)5.产品的组成零部件和装配精度高,系统的精度一定就高。
(×)6.为减少机械传动部件的扭矩反馈对电机动态性能的影响,机械传动系统的基本固有频率应低于电气驱动部件的固有频率的2~3倍,同时,传动系统的固有频率应接近控制系统的工作频率,以免系统产生振荡而失去稳定性。
(×)7.传动机构的转动惯量取决于机构中各部件的质量和转速。
(×)8.在闭环系统中,因齿轮副的啮合间隙而造成的传动死区能使系统以6~10倍的间隙角产生低频振荡,采用消隙装置,以提高传动精度和系统稳定性。
(×)9.进行机械系统结构设计时,由于阻尼对系统的精度和快速响应性均产生不利的影响,因此机械系统的阻尼比ξ取值越小越好。
(×)10.滚珠丝杠垂直传动时,必须在系统中附加自锁或制动装置。
(√)11.采用偏心轴套调整法对齿轮传动的侧隙进行调整,结构简单,且可以自动补偿侧隙。
(√)×12.采用虚拟样机代替物理样机对产品进行创新设计测试和评估,延长了产品开发周期,增加了产品开发成本,但是可以改进产品设计质量,提高面向客户与市场需求能力。
(√)×二、单选题1.以下产品属于机电一体化产品的是(C )。
A.游标卡尺B.电话C.全自动洗衣机 D.非指针式电子表2.为提高机电一体化机械传动系统的固有频率,应设法(A )。
陈文宇有限自动机作业参考答案发布
允许出现空串 S → 0A A → 0A|ε A → 0A|ε
2.2 设 ∑ 0,1 ,请给出∑上的下列语言的文法
(1) 所有以 0 开头的串。
(2) 所有以 0 开头、以 1 结尾的串。
S → 0A
S → 0A
A → 0A|1A|0|1
A → 1|0A|1A
(2) | ∈ 0,1 且 中含形如 10110 的子串
6 第 3 章 有限状态自动机
有限自动机理论习题参考答案
2016
(3) | ∈ 0,1 且 中不含形如 10110 的子串
(4) | ∈ 0,1 且 的倒数第 10 个字符是 1,且以 01 结尾
(5) | ∈ 0,1 且 以 0 开头,以 1 结尾 (6) | ∈ 0,1 且 至少含有两个 1
,,, ,, ,,, ,,, ,,,,,,
∗
,,,, , ,,,,,, ,, ,,, ,,, ,,,,,,
1 第 1 章 基础知识
有限自动机理论习题参考答案
2016
第二章 形式语言
2.1 设
|,
,试构造满足要求的文法 G.
(1) G 是 RG。 右线性文法:
S → OS|OA A → 1A|1 (2) G 是 CFG,但不是 RG。 上下文无关文法: S → AB S → OA|0 B → 1B|1 (3) G 是 CSG,但不是 CFG。 左串<右串 S → AB AB → AAB|ABB A→0 B→0 (4) G 是短语结构文法,但是不是 CSG。 串可以推短 S → 0AB1|01
S → A000A|000
2 第 2 章 形式语言
有限自动机理论习题参考答案
有限自动机第三章答案
第三章******************************************************* ************************1.构造下列语言的DFA ( 陶文婧 02282085 ) (1){0,1}*,1(2){0,1}+,1(3){x|x∈{0,1}+且x中不含00的串}(设置一个陷阱状态,一旦发现有00的子串,就进入陷阱状态)(4){ x|x∈{0,1}*且x中不含00的串}(可接受空字符串,所以初始状态也是接受状态)(5){x|x∈{0,1}+且x中含形如10110的子串}(6){x|x∈{0,1}+且x中不含形如10110的子串}(设置一个陷阱状态,一旦发现有00的子串,就进入陷阱状态)(7){x|x∈{0,1}+且当把x看成二进制时,x模5和3同余,要求当x为0时,|x|=1,且x≠0时,x的首字符为1 }1.以0开头的串不被接受,故设置陷阱状态,当DFA在启动状态读入的符号为0,则进入陷阱状态2.设置7个状态:开始状态q s,q0:除以5余0的等价类,q1:除以5余1的等价类,q2:除以5余2的等价类,q3:除以5余3的等价类,q4:除以5余4的等价类,接受状态q t(8){x|x∈{0,1}+且x的第十个字符为1}(设置一个陷阱状态,一旦发现x的第十个字符为0,进入陷阱状态)(9){x|x∈{0,1}+且x以0开头以1结尾}(设置陷阱状态,当第一个字符为1时,进入陷阱状态)(10){x|x∈{0,1}+且x中至少含有两个1}(11){x|x∈{0,1}+且如果x以1结尾,则它的长度为偶数;如果x以0结尾,则它的长度为奇数}可将{0,1}+的字符串分为4个等价类。
q0:[ε]的等价类,对应的状态为终止状态q1:x的长度为奇且以0结尾的等价类q2:x的长度为奇且以1结尾的等价类q3: x的长度为偶且以0结尾的等价类q4: x的长度为偶且以1结尾的等价类(12){x|x是十进制非负数}5,6,7,8,94,9(13)Φ(14)ε******************************************************************************* 2.(1){{0,1}00}x x x+∈且中不含形如的子串(2){{0,1}10110}x x x+∈且中含形如的子串(3){{0,1}}x x x+∈且中不含形如10110的子串(4){{0,1}10101}x x x+∈和的倒数第个字符是,且以结尾,1(5){{0,1}01}x x x +∈且以开头以结尾(6){{0,1}}x x x +∈且中至少含有两个10,10,1*(7){{0,1}}x x x∈且如果以1结尾,则它的长度为偶数; 如果以0结尾,则它的长度为奇数(8){{0,1}}x x x +∈且的首字符和尾字符相等(9){,{0,1}}T x x x ωω+∈******************************************************************************* 3.根据下列给定文法,构造相应的FA 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
, ,
, ,
, ,
,
, ,
, ,
, , , , , , , , ,
∗
,
,
第 1 章 基础知识
有限自动机理论习题参考答案
2016
第二章 形式语言
2.1 设
(1) G 是 RG。 右线性文法: S → OS|OA A → 1A|1 (2) G 是 CFG,但不是 RG。 上下文无关文法: S → AB S → OA|0 B → 1B|1 (3) G 是 CSG,但不是 CFG。 左串<右串 S → AB AB → AAB|ABB A→0 B→0 (4) G 是短语结构文法,但是不是 CSG。 串可以推短 S → 0AB1|01 0A → 00A|0 B1 → B11|1 允许出现空串 S → 0A A → 0A|ε A → 0A|ε
2 第 2 章 形式语言
有限自动机理论习题参考答案
2016
A → 0A|1A|0|1
A → 0A|1A|0|1
2.3 设 ∑
(1) | S → aSb|ε
, ,
0
,构造下列语言的文法。
(2) | S → AB A → aA|a B → bB|b , 1
(3) S → aAB AB → BA aB → ab bB → bb bA → ba aA → aa (5) |
有限自动机理论 习 题 册
仅限 2016 年春季周益民 B418 授课 100 人班使用
2016 年 3 月 9 日
课程名称 课程编号
有限自动机理论 0600340 必修 公共基础课( 专业选修(
授 课 专 计算机科学与技术 信息安全
班级 修课人数 )
2015 级 100
);学位课 (√ );专业核心课( );任选课( ) ) ; ) ; ) ;公选课( );
课程类型
选修
理论课(√ );实践课(
课堂讲授为主( √ ) ;实验为主( 授课方式 自学为主( 其他: 考 试( √ )考 查( √ ) ) ;专题讨论为主(
是否采用 多媒体授课
是
考核方式及 成绩构成 学时分配 教材
考试成绩构成及比例:作业 20%+期末 80% 考查成绩构成及比例:作业 100% 讲授 40 学时; 名称 作者
∗
00
10,1 ∗
(5) 所有长度为偶数的串形成的语言。 00,01,10,11 ∗ 00
∗
(6) 所有长度为奇数的串形成的语言。 0,1 00,01,10,11 ∗ 0 0,1 ∗ 01011 0,1 0,1 ∗ 000 0,1
∗ ∗
(2) 所有以 0 开头、以 1 结尾的串形成的语言。 1 1 111
∗
(3) 所有以 11 开头、以 11 结尾的串形成的语言。 11 ∪ 11,111 11
∗
11 0
1
∗
11
(4) 所有最多有一对连续的 0 的语言。 ε, 00 10,1 ∗ 01 01 10 1 00 1 11
是否采用 双语教学
否
出版社及出版时间
有限自动机理论 2 版
陈文宇、 田玲、 程伟、 刘贵松
电子工业出版社,2013
形式语言与自动机理论 (第 2 版) 形式语言与自动机 参考书目 Introduction to Automata Theory, Languages and Computation. Introduction to the theory of computation. 授课时间
| ,
1
(4) S → ABA
| A → aA|a B → bB|b
,
,
1
∈ ∑,
∈∑
S → aAa A → aA|bA|a|b|c
(6)
|
,
∈ u‘9∑
S → aSa|bSb|cSc|W W → aW|bW|cW|a|b|c (8) | S → XW X → aXa|bXb|cXc|aa|bb|cc W aW|bW|cW|a|b|c , ∈∑
∗ ∗
01
10
11
∗
(7) 所有包含子串 01011 的串形成的语言。 (8) 所有包含 3 个连续 0 的串形成的语言。 (9) 所有正数第 10 个字符是 0 的串形成的语言。 0,1 0 0,1 ∗ 0 0,1 ∗ 0 0,1 0 1 ∗0 0 1 0 0 1 1
| ,
,试构造满足要求的文法 G.
2.2 设 ∑
S → 0A
0,1 ,请给出∑上的下列语言的文法
(2) 所有以 0 开头、以 1 结尾的串。 S → 0A A → 1|0A|1A S → 00S|01S|10S|11S|00|01|10|11 (8) 所有包含 3 个连续 0 的串。 S → A000A|000
2016
第一章 基础知识
1.4 设 ∑ 0,1 ,请给出下列语言的形式表示。
1
∗
(1) 所有以 0 开头的串形成的语言。 0 0,1 ∗ 0 0 0 0,1 ∗ 1 0 0 11 0,1 01,1
(1) 所有以 0 开头的串。 A → 0A|1A|0|1 S → 11A|11|111 A → AA|0A|1A (7) 所有包含子串 01011 的串。 S → A0|011A|01011
(3) 所有以 11 开头、以 11 结尾的串。 (6) 所有长度为偶数的串。
∗
(10) 所有倒数第 6 个字符是 0 的串形成的语言。
1.5 设
和
是集合
, , , ,
∗
a, b, c, d, e 上的二元关系:
, , ,
∗
, , 。
, ,
, ,
, ,ห้องสมุดไป่ตู้
, ,
, ,
求 ○ ○
○
, , , , ,
○ , , , , ,
, , , , ,
, , , , , , ,
, , , ,
a, b , b, d , d, d , e, e , c, b , , , , ,
蒋宗礼,姜守旭. 陈有祺. John E Hopcroft ,jeffrey D Ullman . Michael Sipser
清华大学出版社, 2007 南开大学出版社, 2003 Addison-Wesleg, 1979
New York: Thomson, 1996
第 1 周——第 10 周
有限自动机理论习题参考答案