机车速度传感器的检测与故障诊断
数控机床控制系统中的传感器介绍

数控机床控制系统中的传感器介绍摘要:由于高精度、高速度、高效率及安全可靠的特点,数控系统在装备制造业中的应用越来越广泛,数控机床是一种装有程序控制系统的自动化机床,能够根据已编好的程序,使机床动作并加工零件。
它综合了机械、自动化、计算机、测量等最新技术,使用了多种传感器,本文从位移、位置、速度、压力、温度以及刀具磨损监控等方面论述了在数控机床控制系统中用到的传感器。
1、数控系统简介数控系统也称为计算机数控系统(CNC),是用计算机控制加工功能,实现数值控制的系统。
数控系统由数控程序、输入装置、输出装置、计算机数控装置(CNC装置)、可编程逻辑控制器、主轴驱动装置和进给(伺服)驱动装置(包括检测装置)等组成。
由于使用了计算机,系统具有了软件功能,又用PLC代替了传统的机床电器逻辑控制装置,使系统更小巧,其灵活性、通用性、可靠性更好,易于实现复杂的数控功能,使用、维护也方便,并具有与上位机连接及进行远程通信的功能。
该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,从而使机床动作并加工零件。
它综合了机械、自动化、计算机、测量、等新技术,使用了多种传感器,本文介绍的是数控系统中各个部分所用到的传感器。
2、传感器简介传感器是一种能承受规定的被测量,能够把被测量(如物理量、化学量、生物量等)变换为另一种与之有确定对应关系并且容易测量的量(通常为电学量)的装置。
它是一种获得信息的重要手段,它所获得信息的正确与否,关系到整个检测系统的精度,因而在非电量检测系统中占有重要地位。
传感器的原理各种各样,其种类十分繁多,分类标准不一样,叫法也不一样。
常见的有电阻传感器、电感式传感器、电容式传感器、温度传感器等。
作为应用在数控系统中的传感器应满足以下一些要求:(1)传感器应该具有比较高的可靠性和较强的抗干扰性。
(2)传感器应该满足数控机床在加工上的精度和速度的要求。
(3)传感器在使用时应该具有维护方便、适合机床运行环境的特点。
电力机车牵引电机故障检测诊断方法概述
电力机车牵引电机故障检测诊断方法概述摘要:研究有效的牵引电机故障检测及诊断技术对于保障行车安全具有重要意义。
首先对电力机车牵引电机常见故障及其原因进行了分析,随后介绍了各类故障的传统诊断方法及智能诊断方法,最后比较了传统方法及智能诊断方法的区别并对智能诊断的实际应用进行了展望。
关键词:牵引电机;故障;智能诊断1.牵引电机常见故障根据牵引电机故障的来源不同可以将故障分为机械故障和电气故障两类。
电气类故障包括定子绕组故障、定子铁芯故障、转子故障等,机械类故障指轴承故障[3]。
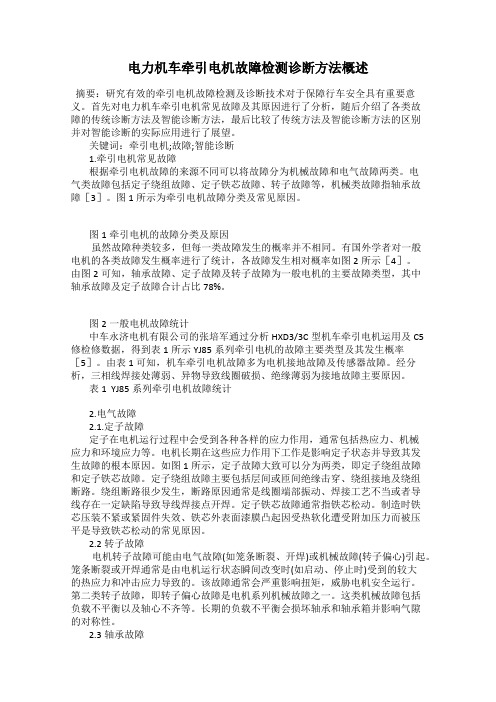
图1所示为牵引电机故障分类及常见原因。
图1牵引电机的故障分类及原因虽然故障种类较多,但每一类故障发生的概率并不相同。
有国外学者对一般电机的各类故障发生概率进行了统计,各故障发生相对概率如图2所示[4]。
由图2可知,轴承故障、定子故障及转子故障为一般电机的主要故障类型,其中轴承故障及定子故障合计占比78%。
图2一般电机故障统计中车永济电机有限公司的张培军通过分析HXD3/3C型机车牵引电机运用及C5修检修数据,得到表1所示YJ85系列牵引电机的故障主要类型及其发生概率[5]。
由表1可知,机车牵引电机故障多为电机接地故障及传感器故障。
经分析,三相线焊接处薄弱、异物导致线圈破损、绝缘薄弱为接地故障主要原因。
表1 YJ85系列牵引电机故障统计2.电气故障2.1.定子故障定子在电机运行过程中会受到各种各样的应力作用,通常包括热应力、机械应力和环境应力等。
电机长期在这些应力作用下工作是影响定子状态并导致其发生故障的根本原因。
如图1所示,定子故障大致可以分为两类,即定子绕组故障和定子铁芯故障。
定子绕组故障主要包括层间或匝间绝缘击穿、绕组接地及绕组断路。
绕组断路很少发生,断路原因通常是线圈端部振动、焊接工艺不当或者导线存在一定缺陷导致导线焊接点开焊。
定子铁芯故障通常指铁芯松动。
制造时铁芯压装不紧或紧固件失效、铁芯外表面漆膜凸起因受热软化遭受附加压力而被压平是导致铁芯松动的常见原因。
东风8B型机车检修和运用中微机系统故障判断与处理吴雄勇

东风8B型机车检修和运用中微机系统故障判断与处理吴雄勇发布时间:2021-09-02T08:42:49.983Z 来源:《中国科技人才》2021年第17期作者:吴雄勇刘涛[导读] DF8B型内燃机车作为我国铁路主型重载货物列车的牵引机车,随着科学技术的进步,机车电气控制设备不断更新和完善,特别是微机控制系统的运用具有功能齐全、控制效果好、功能易于扩展等特点,极大提高了机车的性能,而且降低了运行费用。
中车戚墅堰机车有限公司江苏常州 213011摘要:DF8B型内燃机车作为我国铁路主型重载货物列车的牵引机车,随着科学技术的进步,机车电气控制设备不断更新和完善,特别是微机控制系统的运用具有功能齐全、控制效果好、功能易于扩展等特点,极大提高了机车的性能,而且降低了运行费用。
本文通过对DF8B机车运用中典型微机故障进行分析,并提供了判断和处理方法,为广大机车检修试验人员提供参考。
关键词:DF8B;微机控制;故障分析;处理方法概述:微机柜设置在机车电器间与机械间靠电器间右侧墙壁上,微机系统控制通过五只插件插头接口对外进行输入、输出信号控制。
用于微机系统系统在机车上的控制有多种类型,本文主要介绍用于DF8B型内燃机车的ZY5000-2这种型号的微机故障判断与处理的方法。
微机系统检修及运用中的注意事项:1.在连接或卸下本微机柜之前必须断开如下开关(1)蓄电池闸刀和微机电源开关(2)机控开关2K2.更换插件时必须采取如下措施:(1)严禁带电插拔任何插件;(2)在拔出插件之前,手先摸一下接地外壳;(3)拆下插件需放在静电屏蔽袋内。
3.必须戴上接地手镯才能触摸元器件。
4.非专业或未经培训的人员严禁打开机箱。
5.机车在进行绝缘耐压试验时必须将微机柜5只插头脱开,以防止强电侵入微机柜造成微机柜不可恢复的故障。
一、DF8B微机系统检修中的故障处理方法如下:1.如总控开关合闸后,微机控制柜不工作,则可通过电源插件面板上的插孔进行检查。
电力机车电器-传感器

第五章 其他电器 第三节 传感器
一、概述 (一)传感器的定义和分类 传感器是借助于检测元件接收一种形式的信息,并按一定规律将它转 换成另一种信息的装置。它获取的信息可以为各种物理量、化学量和 生物量,转换后的信息也可以有多种形式。目前的传感器大多为电信 号,因此,从狭义上讲,传感器也可定义为把外界的输入信号转换成 电信号的装置。
四、速度传感器 1.SS4G型电力机车速度传感器 SS4G型电力机车采用FD型速度传感器与SD型速度表配套使用,指示 机车运行速度、行走里程和时间。
(1)速度指示 SD型机车速度表所配用的速度传感器采用FD型永磁单相测速电机, 此传感器装在机车轴箱上,通过机车轮轴轴头,驱动测速电机旋转, 产生单相交流电压,经速度表内的速度控制板中的整流电路整流、滤 波后,变成平滑直流电压,送入广角度直流毫安表。利用电机转速与 电压的线性关系,在广角度电表上显示机车运行速度、轮径磨耗。其 误差可通过调节速度显示电路的电位器来消除。
传感器是自动化系统中不可缺少的元件。它连接被测对象和测试系统 ,提供系统进行处理和决策所必需的原始信息。显然,一个自动化系 统首先要检测到信息才能去进行自动控制,如果传感器不能获得信息 ,或者获得的信息不确切,或者不能把信息精确地转换成电信号,那 么,要显示、处理这些信号就会非常困难,甚至没有意义。所以,传 感器关系着一个测量系统或自动化系统的成败。
在电压传感器中,为了得到合适的原边磁场,首先将被测电压通过原边电阻 降压,产生一次侧电流IP,再通过多匝NP一次侧线圈产生一次侧磁场,该磁 场的磁通密度BP与被测电压成正比(UP∝BP),引起霍尔元件产生霍尔电势 UB,该电势经运算放大器差分放大后,推动功放形成二次侧电流IS,该电流 流过二次侧线圈NS,到测量取样电阻Rm。与此同时,流过二次侧线圈的电 流IS也会在磁路中产生与IS成正比的磁通密度BS(IS∝BS),两磁场方向相反 ,引起磁路中总磁通密度减小,最终达到平衡,从而使处于该磁路中的霍尔 元件工作在零磁通状态。整个过程是一个动态平衡过程,二次侧线圈中的电 流IS(或测量取样电阻上的电压)同样真实地反映了待测电压UP。
LKJ2000型列车运行监控记录装置故障分析与处理
故障判断:如果出现白屏的现象,说明从CPU卡开始到液晶显示屏这些环节有问题,需一步一步来检查。先按压面膜键并有语音提示或者有按键音,说明CPU卡工作正常,如果没有则说明CPU卡有问题。用万用表测量电子盘的工作电压,正常的工作电压在5±0.05V之间,说明CPU卡有可以工作的条件。在没有把握的情况下可先更换CPU卡,观察更换后是否能正常工作,如果正常可判断原来的CPU卡已经故障,然后检查与CPU卡连接的扁平电缆和彩色液晶屏是否故障。
1.屏幕显示器“定屏”。
故障判断:故障现象1为屏幕显示器曲线静止、时钟正常时,原因为监控车载数据编制、存储芯片写入数据信息、屏幕显示器下载文件有误;故障现象2为屏幕显示器曲线静止、时钟停止、故障指示灯不点亮、瞬间开关机能恢复正常工作时,原因为屏幕显示器5V电源不稳定;故障现象3为屏幕显示器曲线静止、时钟停止、故障指示灯点亮时,原因为屏幕显示器至主机监控记录板间CAN通讯回路故障。
检修完成后,需要进行相关的检测。只有达到检测标准并能准确记录数据的配件才可在监控装置上使用,对于不合乎标准的配件一律不许在监控装置上使用。
LKJ2000型列车运行监控记录装置故障分析与处理
摘要:列车运行监控记录装置在保证行车安全设备安全性的同时提高铁路运输效率的过程中是必不可少的。本文对LKJ-2000型列车运行监控记录装置分析其常见的故障并且给出了相应的处理方法。
关键词:LKJ2000故障分析 处理
一、装置屏幕显示器常见的故障及处理
处理方法:规范列车上机车信号感应线圈的安装位置与方法。定期检修地面信号发码设备,加强一体化机车信号记录数据分析,及时发现、解决存在的信号干扰问题,保证地面信号发码设备发送信息的可靠性。测试机车信号入口电流是否达标,尽量将机车信号入口电流调至标准上限,保证信息的可靠性。
JZT_1机车走行部状态监测及故障诊断系统
—62—试验检测JZT-1机车走行部状态监测及故障诊断系统封力民(广州铁路(集团)公司机务处, 广东广州510088)收稿日期:2007-01-17作者简介:封力民(1964-),男,高级工程师,现从事机车技术管理工作。
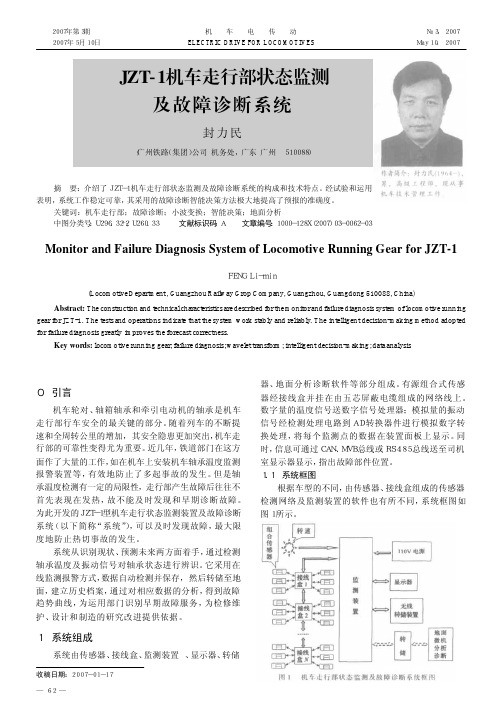
摘要:介绍了JZT-1机车走行部状态监测及故障诊断系统的构成和技术特点。
经试验和运用表明,系统工作稳定可靠,其采用的故障诊断智能决策方法极大地提高了预报的准确度。
关键词:机车走行部;故障诊断;小波变换;智能决策;地面分析中图分类号:U296.32+2;U260.33 文献标识码:A 文章编号:1000-128X(2007)03-0062-03机 车 电 传 动ELECTRIC DRIVE FOR LOCOMOTIVES №3, 2007May10, 2007 2007年第3期 2007年5月10日0引言机车轮对、轴箱轴承和牵引电动机的轴承是机车走行部行车安全的最关键的部分。
随着列车的不断提速和全周转公里的增加, 其安全隐患更加突出,机车走行部的可靠性变得尤为重要。
近几年,铁道部门在这方面作了大量的工作,如在机车上安装机车轴承温度监测报警装置等,有效地防止了多起事故的发生。
但是轴承温度检测有一定的局限性, 走行部产生故障后往往不首先表现在发热,故不能及时发现和早期诊断故障。
为此开发的JZT-1型机车走行状态监测装置及故障诊断系统(以下简称“系统”),可以及时发现故障,最大限度地防止热切事故的发生。
系统从识别现状、预测未来两方面着手,通过检测轴承温度及振动信号对轴承状态进行辨识。
它采用在线监测报警方式,数据自动检测并保存, 然后转储至地面,建立历史档案,通过对相应数据的分析,得到故障趋势曲线,为运用部门识别早期故障服务,为检修维护、设计和制造的研究改进提供依据。
1系统组成系统由传感器、接线盒、监测装置 、显示器、转储Monitor and Failure Diagnosis System of Locomotive Running Gear for JZT-1FENGLi-min(Locomotive Department , Guangzhou Railway Grop Company, Guangzhou, Guangdong 510088, China)Abstract: The construction and technical characteristics are described for the monitor and failure diagnosis system of locomotive running gear for JZT-1. The tests and operations indicate that the system work stably and reliably. The intelligent decision-making method adopted for failure diagnosis greatly improves the forecast correctness.Key words: locomotive running gear; failure diagnosis; wavelet transform; intelligent decision-making; data analysis器、地面分析诊断软件等部分组成。
LKJ、机车信号、STP、CIR、GYK故障处理
原因分析:110V电源输入错误;110V电源正负接反;电源板上保险熔断。
处理过程:
1检查110V电源正负极端子;
2更换电源板保险或更换电源板。
(3)通电后不工作,电源板110V灯亮,其余均不亮
原因分析:电源板电源模块故障
处理过程:更换电源板。
(4)通电后,电源板,主机板,连接板上电正常,记录板无指示灯。
6还是不行,更换GMS主机。
注:如时间紧迫,应第一时间使用手动现场数据升级
2至监控Tax箱处,旋下X12或X11航插,使用万用表打至交流电压位,用表笔接触监控Tax箱X12或X11航插座上1,4插针,观察是否有1V左右的感应电压,如未检测到此电压,更换Tax箱上的机车信号接口板(Tax箱上右数第一插槽)后再次测量,如仍未检测到此电压,表明接口板无问题,同时联系监控人员检查Tax箱通信记录板提供数据是否正常。
3请检查机车是否正处于非集中区并距离监控中心较远的地方,或该机车附近向
4着监控中心方向有很高大的阻挡物,如山坡、楼房等,这对通讯有坏影响;
5检查地面服务器系统是否工作正常,检查方法请参照地面服务器部分;
6可能车载数传台本身发生了故障。
(四)CIR故障处理
(1)MMI按键操作失效
1检查MMI按键是否卡键,卡键有滴滴的按键音。
LKJ、机车信号、STP、CIR、GYK故障处理
工作页
项目课题
LKJ、机车信号、STP、CIR、GYK故障处理
项目任务
掌握常见的车载设备故障判断步骤和处理方法
课时安排
8学时
1.教学目标
1.了解常见的车载设备故障现象。
2.掌握常见的车载设备故障的判断步骤和处理方法。
SS3B固定重联 机车故障检测及处理
第六篇机车故障检测及处理1. 机车电气系统SS3B型固定重联机车设有各种故障检测保护装置。
并且在司机操纵台上安装了微机显示屏,在司机操纵台电表模块下方设置了故障信号显示屏,以监视各部件的动作状态和显示故障内容。
微机显示屏的显示内容请参考该装置的使用说明书。
1.1 常见故障与处理1.1.1 受电弓升不起1)故障原因(1)保护阀BHF及门联锁风路不通。
(2)门联锁重联安全风压继电器515KF不动作。
2)故障处理(1)疏通电路及风路。
(2)对他节车的515KF进行处理,如果在运行过程中,受电弓开关1SDFK打“单机”位:只升本节车,切除他节车,维持运行。
1.1.2 主断路器不闭合1)故障原因(1)司控器不在零位。
(2)劈相机按键在合位。
(3)主断电磁阀线圈坏。
2)故障处理(1)确认两个司机室的司控器都在零位。
(2)确认劈相机按键在打开位。
1.1.3 主断路器不能保持闭合1)故障原因(1)主断路器保持线圈坏。
(2)主断路器控制部分坏或连接器脱线。
2)故障处理对上述相应情况进行具体处理,(在运行中应加强走廊巡视,过绝缘分段区时采用降弓的方法通过,回段后进行处理)。
1861.1.4 “预备”信号灯不灭1)故障原因(1)两位置转换开关辅助接点不良,或转换没完成。
(2)劈相机没工作。
(3)主断没合上。
(4)位置转换在制动位而风机没工作。
2)故障处理(1)确认两位置转换到位。
(2)使劈相机工作。
(3)使主断合上。
(4)使风机工作或隔离相应环节。
引起此故障的原因可能会来自很多方面,所以故障的处理必须根据实际情况进行灵活处理。
1.1.5 高压瓷瓶放电击穿跳闸更换高压瓷瓶,如果在运行中,切除相应一节机车维持运行到段处理。
1.1.6 102QA脱扣,网压消失降下受电弓,断开主断路器,重合102QA,再试。
1.1.7 原边过流当原边过流继电器YGJ经电流互感器检测到原边过流而动作时,导致分断主断。
按电路图查清原边过流原因,处理后再试。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
. .. .题目:基于神经网络的机车速度传感器检测与故障诊断院系:电气工程系班级:电力机车班学号:2010姓名:指导教师:2013年6月5日基于神经网络的机车速度传感器的检测与故障诊断[****,***** 2010电车**班,****]摘要建立了RBF神经网络预测器模型,将其应用到机车双速度传感器的故障诊断中,并提出了诊断决策方法。
利用MATLAB实现了RBF神经网络预测器的仿真,并模拟了机车速度传感器输出的3种故障模式进行了故障诊断辨识。
仿真结果表明文中提出的方法能够准确地进行速度传感器在线故障诊断。
关键字:机车;RBF神经网络;速度传感器;故障诊断AbstractFor fault diagnosis of locomotive speed sensor, a predictor method based on RBF neural network is established, and diagnostic decision method is also proposed. The RBF neural network predictor and three kinds of fault mode of locomotive speed sensor are simulated by MATLAB. The simulation results indicate that this method can diagnose faults of the speed sensor online exactly, and provides a new idea for locomotive speed sensor fault diagnosis.Key words: locomotive; RBF neural network; speed sensor; fault diagnosis1.引言机车速度传感器是通过测量机车车辆的主轮轴转速来实现列车控制功能的基础设备之一,其性能指标直接影响机车运行监控装置的正常功能,是整个控制系统的关键。
但由于其工作环境复杂、恶劣,在列车控制系统中,测速传感器较薄弱,是机车车载设备故障的主要根源。
目前,人工检测和定期维修校准是诊断测速传感器故障的最基本的方法,但其工作效率低、工作强度大、实时性差,已不能满足现代铁路系统的发展要求。
近年来,为了提高对典型的复杂、多目标、大滞后、非线性系统的故障诊断能力,同时提高故障诊断效率及降低误报率,采用现代故障诊断技术已成为目前故障诊断领域的研究热点。
BP(Back Propagation,简称BP)神经网络是故障诊断中研究最广泛的一种,它采用多层感知器,并采用反向传播算法进行网络训练。
但由于BP 算法涉及到非线性优化问题,同时调节权值采用的负梯度下降法存在局部极小点、收敛速度慢等,因而它就很难应用于实际系统当中。
径向基函数RBF(Radial Basis Function,简称RBF)神经网络克服了BP神经网络的缺陷,相比BP神经网络,RBF神经网络具有更容易逼近函数的局部、训练时间短、更适合在线诊断等优点。
本文以光电式脉冲测速传感器系统为基础,在分析常见故障模式及故障特征的基础上,采用RBF 神经网络的预测方法,建立速度传感器的故障诊断模型,实现对传感器系统的故障诊断和数据重构。
2.关于神经网络的故障诊断方法人工神经网络是由大量神经元以某种拓扑方式相互连接而成的,利用网络拓扑结构和权值分布实现非线性的映射,通过全局并行处理实现从输入空间到输出空间的信息变换,由于能够高精度地模拟人脑神经网络的实现过程,因此在故障诊断领域中得到广泛的应用。
RBF神经网络是一种前馈型网络,一般为3层结构,其结构如图1所示。
该网络有n个输入、h个隐节点、m 个输出。
其中12(,,,)T n n X x x x R =∈为网络输入矢量,h mW R⨯∈为输出权值矩阵,01,,,m b b b 为输出单元偏移,12(,,,)Tm Y y y y =为输出向量,(*)i Φ为第个隐节点的激活函数,∑表示输出层的线性激活函数,||*||则表示欧式数。
径向基函数Φ式中:i σ称为该函数的扩展常数或宽度。
i σ越小,径向基函数的宽度就越小,其函数越具有选择性。
于是,k 个输出可表示为1k i i i i =式中:i w 为输出层的调节权值;i c 为隐含层的中心向量;||||i x c -为向量i x c -的欧几里德数(即x 与c i 之间的径向距离)。
3. 机车速度传感器的结构与常见故障国的燃机车、电力机车和动车组广泛使用光电式速度传感器,传感器将机车运行的速度量对应转换为光电脉冲,并提供给机车运行监控装置。
因而,速度传感器的性能指标直接影响机车运行监控装置的工作,是整个机车速度监控系统的关键。
3.1 光电式速度传感器的结构这里以NTQG15D 光电式速度传感器为例,由支承结构、光电转换电路、转轴及万向节传动机构三部分组成。
光栅盘固定在转轴万向节的后端,转轴由2x46204支承在底座上,轴承润滑采用锂基4号润滑脂。
光栅转动与静止部分采用可逆密封胶圈密封以防止灰尘及油污侵入,转轴为万向联轴节的单叉节,万向节共设有8个滚针轴承,确保转动的灵活性。
光电转换模块固定在底座上位于光栅片两端,电缆引出线固定在底座上并采用耐油的橡胶管防护,护管与底座采用冲压紧箍帽密封,采用插针接触可靠的JL5型的机车电连接器,为防止连接器出进水,传感器引出电缆与底座的连接器注胶密封后再封装固定。
3.2 工作原理及技术参数NTQG15D 光电式速度传感器利用一个光电耦合器件经随机车轮转动的光栅片变为断续的光,使光电耦合器中的光敏接收管输出通断的脉冲信号,经电路放大整形后,输出与转速成比例的方波脉冲序列,经计算机处理变为监控所需的机车运行速度信号。
工作直流电源:15V ,功耗电流小于50 mA ,输出脉冲幅值(负载电阻R L =3K Ω)高电平9V ,低电平-2 V ,相位差:900±50%,转速围:0~x xx 1y m y (||||)h h x c Φ-1500 r/min,每圈的脉冲数:200,输出方波波形占空比:(50±20)%。
3.3常见故障(1)光电耦合器件损坏主要是光电器件底座的固定角与器件的封装体断裂导致光电耦合器件与光栅片的相对位置发生变化,产生的主要原因:光电耦合器件封装材质本身较脆,安装时由于螺丝拧的松、紧度不同,使光电耦合器件固定脚材质形变,经过一段时间的使用固定角与器件的封装体发生断裂。
建议使用可调整扭力的扭矩安装工具以保证固定螺丝安装时的松紧适度,减少此类故障的发生。
(2)停车起速度机车在停车状态下,监控显示有5Km/h以下的速度,此类现象多为传感器引出电缆线屏蔽不良,抗干扰差造成,近来动车组使用的NTQG15B速度传感器发生此类故障的也较多。
采取的措施是加强屏蔽、可靠接地,针对动车组更换抗干扰强的新型速度传感器。
(3)占空比超标在日常的检修过程中,经常出现占空比超标、或处于临界值而造成监控速度不准,主要原因是光电耦合器件封装上的问题,经过一段时间的运用,参数发生变化,要对相应通道的光电耦合模块进行更换。
(4)传动轴折断造成这一现象的主要原因:速度传感器安装座即机车轴箱外盖安装开孔尺寸及车轮轴端方孔套尺寸不合适或使用的速度传感器轴长尺寸不对,机车在运行时传感器传动轴滑出方孔套而无法归位、或传感器传动方轴与机车轴端面顶死造成传动轴折断现象。
避免此类现象的发生主要是在安装时要确认好安装尺寸和正确使用长短轴传感器。
(5)两通道间的相位差超标光电耦合模块沿光栅圆周方向及径向的安装位置发生微小的变化都将引发两通道之间相位差的变化,当出现相位超标时要仔细检查光电模块安装螺丝是否松动,同时也要检查光栅片是否发生形变,因为光栅片发生形变后将使将使光电耦合器件收、发位置发生变化。
(6)丢脉冲运用一段时间后出现丢脉冲现象,一是光电耦合器件本身的材质问题,主要是光接收电路的材料感光度降低,造成电路转换过程中丢脉冲。
尽管有多种故障原因,但故障造成的情况归结起来可以有3种:空转、滑行、不可自行恢复的机械故障。
因此下文对速度传感器的故障诊断主要从这三个方面来讨论。
4.基于神经网络方法的机车速度传感器故障诊断4.1.机车速度传感器故障诊断的模型建立机车速度传感器利用光电转换原理将机车轮轴转速转换成电脉冲信号输出,即机车主轴转动一周, 传感器就会产生出n个(n为码盘齿数)电脉冲输出信号。
对于架控方式的机车,一个基本控制单元中一般至少有2个速度传感器,基于神经网络的双速度传感器故障诊断原理如图2所示。
图2 机车双速度传感器故障诊断原理图分别对2个速度传感器建立RBF 神经网络预测器。
假设刚开始2个速度传感器都正常工作,将传感器1前k+2个时刻的输出数据x 1(1)~x 1(k+2)和传感器2前k+2个时刻的输出数据x 2(1)~x 2(k+2)通过采样获得并保存,分别作为2 个传感器神经网络预测器的初始学习样本数据,2个神经网络预测器经过在线训练以后开始工作。
因2个神经网络预测器工作原理相同,下面以神经网络预测器1为例说明其工作原理,预测器结构如图3所示。
图3 RBF 神经网络预测期结构示意图取速度传感器1的前k 个输出数据x 1(1)~x 1(k)作为 RBF 神经网络预测器1的输入,x 1(k+1)作为RBF 神经网络预测器1输出,组成第一组训练样本,x 1(2)~x 1(k+1)作为RBF 神经网络预测器1的输入,x 1(k+2)作为RBF 神经网络预测器1输出,组成第二组训练样本,即训练样本表示为:11111111(1)(2)()(1),(2)(2)(3)(1)T Tx x x k x k X Y x k x x x k +⎡⎤⎡⎤==⎢⎥⎢⎥++⎣⎦⎣⎦以X 为输入、Y 为输出在线训练RBF 神经网络预测器1,按梯度下降法调整权值矩阵,当达到一定精度后,RBF 神经网络预测器开始工作,此时,将x 1(3)~x 1(k+2)作为新的输入,RBF 神经网络预测器1将预测传感器在下一时刻即k+3时刻的输出 ,将预测值与这一时刻实际采样值x 1(k+3)相减,得到误差e 1。
若e 1小于给定某一阈值e*,则认为此时传感器1工作正常,并将当前采样值加入到学习样本中,覆盖掉先前的第一组样本,对网络预测器重新进行训练,则新的学习样本变为:11111111(2)(3)(1)(2),(3)(3)(4)(2)T Tx x x k x k X Y x k x x x k ++⎡⎤⎡⎤==⎢⎥⎢⎥++⎣⎦⎣⎦若e 1大于给定某一阈值e*,则认为此时传感器1工作不正常,依次类推,RBF 神经网络预测器一边不断在线学习新的样本,一边对传感器下一时刻输出值进行预测。