L6203直流电机驱动设计原理图及例程
RM6203设计指南12V1A

高性能电流模式PWM 开关电源控制器RM6203(1203) Design File陕西亚成微电子深圳办事处发行日期:2010-11-25陕西亚成微电子有限责任公司AE Department1、概述、特点、应用领域2、引脚功能描述及封装3、极限参数4、推荐工作条件5、应用信息6、典型应用电路(电源适配器)7、联系信息概述RM6203是一款高性能AC/DC电流模式PWM 控制器,采用双极型制作工艺、可靠性高、功耗低、电路简洁等特点。
内置800V0.8A晶体管,还提供了完善的防过载防饱和功能,可实时防范过载、变压器饱和、输出短路等异常状况,提高了电源的可靠性。
在AC85-265V的宽电压范围内提供12W的连续功率,峰值功率可达18W。
工作频率可由外部器件进行设定,提供DIP8的环保无铅标准封装。
特点1)内置800V高压功率开关管,极少的外围器件。
2)锁存脉宽调制,逐脉冲限流检测。
3)低输出降频功能,无输出功耗可低于0.3W4)内建斜坡与反馈补偿功能5)独立上限电流检测控制器,实时处理控制器的过流、过载。
6)关断周期发射极偏压输出,提高了功率管的耐压7)内置具有温度补偿的电流限制电阻,精确电流限制8)内置热保护电路9)利用开关功率管的放大作用完成启动,启动电阻的功耗减少10 倍以上。
10)低启动和工作电流11)VCC 过压自动限制12)宽电压连续输出功率可达12W, 峰值输出功率可达18W 应用领域1)电源适配器(如充电器,外置电源盒等)2)开放式电源(如DVD,DVB、PC辅助电源等)引脚功能描述封装PCB Layout时应将PIN6和PIN7之间保留1mm以上的的安全距离,以防止放电。
在生产过程中,注意人体静电和生产设备漏电对IC的损坏,比说带静电手环,电烙铁、锡炉、切脚机等生产设备可靠接地等,以避免不必要的损坏。
极限参数:1)供电电压VCC (16V)2)启动输入电压 (16V)3)引脚输入电压···························································VCC+0.3V 4)OC集电极承受电压···········································-0.3V——800V5)峰值开关电流·································································800mA 6)总耗散功率·································································1000mV 7)工作温度范围·······························································0-125℃8)储存温度范围····························································-55-125℃9)焊接温度································································+260℃,10 S推荐工件条件:应用信息:1)CT定时电容与开关频率的关系:由IC内部电流源对CT电容进行100uA 恒流充电形成时钟的上升沿,在充电电压至 2.5V 时,内部电路将以1.9mA的下拉电流对CT 放电,形成时钟的下降沿,完成一个时钟周期,一个时钟周期约为:T=CT*24000(S),Fs=1/T(Hz),虽然双极型电路也能工作在较高的频率下,但对于双极功率开关而言,仍需考虑存储时间对开关损耗的影响。
图文讲解无刷直流电机的工作原理

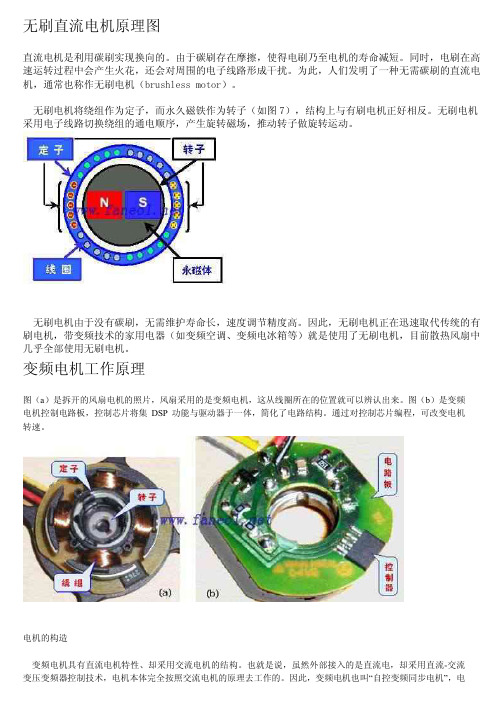
图文讲解无刷直流电机的工作原理电动无刷直流电机由电动机主体和驱动器组成导读:,是一种典型的机电一体化产品。
同三相异步电动机十分相似。
它的应用非常广泛,,机的定子绕组多做成三相对称星形接法在很多机电一体化设备上都有它的身影。
什么是无刷电机?无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。
由于无刷所以不会像变频调速下重载启动的同步电机那样在转子上另直流电动机是以自控式运行的,加启动绕组,也不会在负载突变时产生振荡和失步。
中小容量的无刷直流电动机的永磁体,稀土永磁无刷电动机的体积比材料。
因此,现在多采用高磁能级的稀土钕铁硼(Nd-Fe-B)同容量三相异步电动机缩小了一个机座号。
. . .无刷直流电动机是采用半导体开关器件来实现电子换向的,即用电子开关器件代替传无换向火花、机械噪声低等优点,广泛应用于统的接触式换向器和电刷。
它具有可靠性高、高档录音座、录像机、电子仪器及自动化办公设备中。
无刷直流电动机由永磁体转子、多极绕组定子、位置传感器等组成。
位置传感按转子(即检测转子磁极相对定子绕组的位位置的变化,沿着一定次序对定子绕组的电流进行换流按并在确定的位置处产生位置传感信号,经信号转换电路处理后去控制功率开关电路,置,定子绕组的工作电压由位置传感器输出控制的电子开。
一定的逻辑关系进行绕组电流切换)关电路提供。
位置传感器有磁敏式、光电式和电磁式三种类型。
采用磁敏式位置传感器的无刷直流电动机,其磁敏传感器件(例如霍尔元件、磁敏二极管、磁敏诂极管、磁敏电阻器或专用集成电路等)装在定子组件上,用来检测永磁体、转子旋转时产生的磁场变化。
采用光电式位置传感器的无刷直流电动机,在定子组件上按一定位置配置了光电传感器件,转子上装有遮光板,光源为发光二极管或小灯泡。
转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇间生脉冲信号。
(例是在定子组件上安装有电磁传感器部件采用电磁式位置传感器的无刷直流电动机,谐振电路等),当永磁体转子位置发生变化时,电磁效应将如耦合变压器、接近开关、LC 使电磁传感器产生高频调制信号(其幅值随转子位置而变化)。
L6203直流电机驱动设计原理图及例程..

L6203直流电机控制驱动器【简要说明】一、尺寸:长66mmX宽33mm X高28mm二、主要芯片:L6203三、工作电压:控制信号直流4.5~5.5V;驱动电机电压7.2~30V四、可驱动直流(7.2~30V之间电压的电机)五、最大输出电流4A六、最大输出功率20W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制一台直流电机6、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)7、可实现正反转8、此驱动器非常时候控制飞思卡尔智能车,驱动器压降小,电流大,驱动能力强。
【标注图片】直流电机的控制实例使用驱动器可以控制一台直流电机。
电机分别为OUT1和OUT2。
输入端EN可用于输入PWM脉宽调制信号对电机进行调速控制。
(如果无须调速可将EN使能端,接高低电平,高电平启动,低电平停止。
也可由单片机输出直接控制)实现电机正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,电机正转。
(如果信号端IN1接低电平,IN2接高电平,电机反转。
)可参考下图表:电机旋转方式控制端IN1控制端IN2EN使能端M 正转高低高反转低高高调速* * 输入PWM信号直流电机测试程序【原理图】【测试程序】/********************************************************************汇诚科技实现功能:调试程序使用芯片:AT89S52 或者 STC89C52晶振:11.0592MHZ编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技*********************************************************************/ #include<reg52.h>#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型sbit P2_0=P2^0;//启动sbit P2_1=P2^1;//停止sbit P2_2=P2^2;//正转sbit P2_3=P2^3;//反转sbit P1_0=P1^0;//使能sbit P1_1=P1^1;//IN1sbit P1_2=P1^2;//IN2/********************************************************************延时函数*********************************************************************/ void delay(uchar t)//延时程序{uchar m,n,s;for(m=t;m>0;m--)for(n=20;n>0;n--)for(s=248;s>0;s--);}/********************************************************************主函数*********************************************************************/ main(){while(1){if(P2_0==0){delay(3);if(P2_0==0)//启动{P1_0=1;P1_1=1;P1_2=0;}}if(P2_1==0){delay(3);if(P2_1==0)//停止{P1_0=0;}}if(P2_2==0){delay(3);if(P2_2==0)//正转{P1_1=1;P1_2=0;}}if(P2_3==0){delay(3);if(P2_3==0)//反转{P1_1=0;P1_2=0;}}}}/********************************************************************结束*********************************************************************/L6203DMOS(消耗型金属氧化物半导体)全控桥驱动器⏹供电电压:48V⏹最大峰值电流5A(L6021最大2A)⏹电流有效值:⏹L6201: 1A; L6202: 1.5A; L6203/L6201PS: 4A ⏹R DS (ON) 电阻值0.3 Ω (室温25 ︒C)⏹击穿电压保护⏹兼容TTL电路⏹运行最高频率100KHz⏹热滞⏹集成逻辑电路使用⏹高效概述L6201是一种应用多源BCD(Bipolar,CMOS,DMOS)技术来控制电机的全控桥驱动器芯片,这种芯片能将独立的DMOS场效应晶体管和CMOS以及二极管集成在一块芯片上。
无刷直流电机原理图
。3 图如�成组分部个三器向换和子转、子定由它。械机转旋的能械机为换转能电流直将是机电流直 。间之分�转 00001�0001 在速转�V21�为压电电 供�机电流直为机电扇风的用使中脑电。型类种两机电流交和机电流直有机电�同不的式方电供据根
理原作工本基的机电扇风流直
。号信制控速调入输机电扇风向它过通�线号信制控速转是而 �线出输号信速测是不并线引根三第的扇风线引三些某�是的意注该应。线出输号信速转是则线的色颜 种一外另�地接和源电 V21�为别分色黑和色黄中线引根三�出输头插线引三从般一号信速测的扇风 。较比行进据数的示显与后然�速转际实量测表速转用使可�数倍个某是还速转实真是速转 扇风别辨欲如。号信速转实真的扇风映反成形能才理处过经须必�冲脉个 6 或个 4、个 2 生产圈一转每 如譬�数倍的速转是而�速转实真的扇风是不并号信速转的出输扇风些某。示显行进机主给供提线总据 数过通接直可号信的样这�圈一过转扇风示表头波个每�式形冲脉为常通号信速转的出输路电扇风从
圈线枢电使�在存的器向换于由�见可。场磁生产续继中组绕该在并�组绕对一另入接压电电供将器向 换�后度角定一过转子转当。接联路电外同以得组绕枢电的动转使�刷电的定固着压簧弹用面表的器向 换在。片缘绝是间中片向换的邻相个两每�成组片向换多许由�置装殊特种一的机动电流直是器向换 。动转下用作的力在子转此因�的动不定固是子定于由。用作的力生产场磁的子定与场 磁该�场磁生产时过通流电有中组绕当。组绕为之称�成而制绕线包漆由�圈线的上以组两有中子转 。分部转旋非的机电是�上架支扇风在定固被�极磁主即�子定
理原作工机电频变
。机电刷无用使部全乎几 中扇风热散前目�机电刷无了用使是就�等箱冰电频变、调空频变如�器电用家的术技频变带�机电刷 有的统传代取速迅在正机电刷无�此因。高度精节调度速�长命寿护维需无�刷碳有没于由机电刷无
直流电机驱动电路
驱动电路图
当PWM网络输出低电平时,Q1导通,电机开始工作;当PWM网络输出 高电平时,Q2导通,Q1截止,电机停止工作,因此可通过改变PWM的占空比, 来控制电机的导通时间,从而实验电机转速的控制。
测速
本实验选用的直流电机自带光栅,电机转 一圈,电机的输出口输出334个脉冲,因此 可通过测量脉冲个数计算出前电机的转速。 “MF”输出的脉冲送回单片机进行TA捕获, 在周期1s的时间内捕获的脉冲为n个,那么 步进电机的转速为: V=n/334 (round/s)
PWM波
在PWM驱动控制的调整系统中,按一个固定的频率 来接通和断开电源,并根据需要改变一个周期内 “接通”和“断开”时间的长短。通过改变直流 电机电枢上电压的“占空比”来改变平均电压的 大小,从而控制电动机的转速。因此,PWM又被称 为“开关驱动装置”。在脉冲作用下,当电机通 电时,速度增加;电机断电时,速度逐渐减少。 只要按一定规律,改变通、断电的时间,即可让 电形中,负载接通的时间与一个周期的 总时间之比叫做占空比(Duty Cycle)。 PWM波其实就是一种特殊的方波,方波中逻 辑“1”和逻辑“0”电平的时间是等长的, 而PWM中它们不是等长的,逻辑“1”电平 的时间比上PWM的周期就是PWM的占空比。
上图为占空比分别为20%和80%的PWM波形
直流电机驱动电路
PWM波控制
PWM波
脉冲宽度调制(PWM)是英文“Pulse Width Modulation”的缩写,简称脉宽调 制。 PWM是通过控制固定电压的直流电源 开关频率,从而改变负载两端的电压,进 而达到控制要求的一种电压调整方法。PWM 可以应用在许多方面,如电机调速、温度 控制、压力控制等。
电机驱动电路(详细)

电机驱动电路一、直流电机驱动电路的设计目标在直流电机驱动电路的设计中,主要考虑一下几点:1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。
如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。
2.性能:对于PWM调速的电机驱动电路,主要有以下性能指标。
1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。
要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。
3)对控制输入端的影响。
功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。
4)对电源的影响。
共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。
5)可靠性。
电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。
二、三极管-电阻作栅极驱动1.输入与电平转换部分:输入信号线由DATA引入,1脚是地线,其余是信号线。
注意1脚对地连接了一个2K 欧的电阻。
当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。
当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。
或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。
高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。
KF347的输入电压范围不能接近负电源电压,否则会出错。
直流电机的驱动
直流电机驱动电路设计时间:2007-04-23 来源: 作者: 点击:32646 字体大小:【大中小】一、直流电机驱动电路的设计目标在直流电机驱动电路的设计中,主要考虑一下几点:1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。
如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。
2.性能:对于PWM调速的电机驱动电路,主要有以下性能指标。
1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。
要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。
3)对控制输入端的影响。
功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。
4)对电源的影响。
共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。
5)可靠性。
电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。
二、三极管-电阻作栅极驱动1.输入与电平转换部分:输入信号线由DATA引入,1脚是地线,其余是信号线。
注意1脚对地连接了一个2K欧的电阻。
当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。
当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。
或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。
高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。
用8253和L6203实现直流电机PWM调速控制
1引言直流电机转速的控制主要分为励磁控制和电枢电压控制两种方法,其中第二种方法比较常用。
传统的做法是通过调节电阻来改变电枢端的电压,从而达到调速的目的,然而此种调压方法效率很低。
脉宽调制(PWM )技术是利用数字信号对模拟电路进行控制的一种技术,现在越来越广泛的应用于变频调速系统中[2]。
通过调节信号的占空比,从而起到对电机转动角度和速度的控制,具有响应速度快、精度高、损耗低等特点。
目前,输出PWM 信号的电路有很多,有用模拟电路实现的,也有采用结合软件编程的数字电路。
借用可编程的定时/计数器芯片8253的工作方式2,通过编程设定计数初值,可以产生占空比大于或等于1/2的脉冲信号,如要产生占空比小于1/2的信号,只需要在输出端加一个反相器便可实现。
另外,在对电机的控制上,L6203芯片也被广泛地应用。
文章提出的方案原理可靠,电路结构简单,并在实际中得到了应用。
2PWM 调速原理冲量相等但形状不同的窄脉冲加在具有惯性的环节上,效果基本是相同的。
PWM 脉宽调制控制技术就是根据这样的理论建立起来的[3],其原理如图1所示。
图1中T 1为高电平的持续时间,T 2为低电平的持续时间,U d 为加在电机电枢两端的脉冲幅值电压。
当把这样的脉冲信号供给电机后,电机电枢两端得到一个电压的平均值U o 为:图1PWM 波形图U U dT 1T 1T 1T 2T 2t用8253和L6203实现直流电机PWM 调速控制成俊康,张涛(四川大学激光应用技术研究所,四川成都610065)摘要:为了实现对直流电机转速的控制,采用了PWM 脉宽调制的电机控制思想,在PWM 信号的产生上,设计了一种由8253(可编程定时/计数器)的工作方式2来产生脉宽调制信号的新方法,此脉冲信号的占空比可以通过软件编程的方法来调节,占空比的调节范围可达到1/65536-65535/65536;针对直流电机方向控制的问题,采用了L6203全桥驱动芯片,通过PWM 信号和L6203芯片共同实现对直流电机转速及方向的控制。
毕业设计:数控直流稳压电源设计
数控直流电流源设计摘要AVR 系列的单片机不仅具有良好的集成性能, 而且都具有在线编程接口, 其中的Mega 系列还具有JTAG 仿真和下载功能; 含有片内看门狗电路、片内Flash、同步串行接口SPI; 多数AVR 单片机还内嵌了A/D 转换器、EEPROM、模拟比较器、PWM 按时计数器等多种功能; AVR 单片机的I/O 接口具有很强的驱动能力, 灌入电流可直接驱动继电器、LCD 等元件, 从而省去驱动电路, 节约系统本钱。
关键词:直流稳压电源;AVR单片机;液晶显示。
一、前言数控电源是从80年代才真正的进展起来的,期间系统的电力电子理论开始成立。
在以后的一段时刻里,数控电源技术有了长足的进展。
但其产品存在数控程度达不到要求、分辨率不高、功率密度比较低、靠得住性较差的缺点。
因此数控电源要紧的进展方向,是针对上述缺点不断加以改善。
单片机技术及电压转换模块的显现为精准数控电源的进展提供了有利的条件。
新的变换技术和操纵理论的不断进展,各类类型专用集成电路、数字信号处置器件的研制应用,到90年代,己显现了数控精度达到0.05V的数控电源,功率密度达到每立方英寸50W 的数控电源。
从组成上,数控电源可分成器件、主电路与操纵等三部份。
电源采纳数字操纵,具有以下明显优势:1)易于采纳先进的操纵方式和智能操纵策略,使电源模块的智能化程度更高,性能更完美。
2)操纵灵活,系统升级方便,乃至能够在线修改操纵算法,而没必要改动硬件线路。
3)操纵系统的靠得住性提高,易于标准化,能够针对不同的系统(或不同型号的产品),采纳统一的操纵板,而只是对操纵软件做一些调整即可。
二、系统功能系统电压调剂范围为0~12V,最大输出电流1A,具有过载和短路爱惜功能。
输出电压可用1602LCD液晶显示。
键盘设有6个键,复位键,步进增减1V两个键,步进增减0.1V两个键和确认键。
复位键用于启动参数设定状态(5V),步进增减键用于设定参数数值,确认键用于确认输出设定值[2,3].电源开机设定电压输出默许值为5V。
详解直流电机驱动电路设计
直流电机(direct current machine )是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。
它是能实现直流电能和机械能互相转换的电机。
当它作电动机运行时是直流电动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换为电能。
直流电机的基本构成直流电机山定子和转子两部分组成,其间有一定的气隙。
直流电机的定子由机座、主磁极、换向磁极、前后端盖和刷架等部件组成。
其中上磁极是产生直流电机气隙磁场的主要部件,山永磁体或带有直流励磁绕组的叠片铁心构成。
直流电机的转子则山电枢、换向器(乂称整流子)和转轴等部件构成。
其中电枢山电枢铁心和电枢绕组两部分组成。
电枢铁心山硅钢片叠成,在其外圆处均匀分布着齿槽,电枢绕组则嵌置于这些槽中。
换向器是一种机械整流部件。
山换向片叠成圆筒形后,以金属夹件或塑料成型为一个整体。
各换向片间互相绝缘。
换向器质量对运行可靠性有很大影响。
电刷主谡极直流电机的组成结构直流电机的结构应由定子和转子两大部分组成。
直流电机运行时静止不动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。
运行时转动的部分称为转子,其主要作用是产生电磁转矩和感应电动势,是直流电机进行能量转换的枢纽,所以通常乂称为电枢,山转轴、电枢铁心、电枢绕组、换向器和风扇等组成。
01定子主磁极i磁极的作用是产生气隙磁场。
主磁极山主磁极铁心和励磁绕组两部分组成铁心一般用0. 5inm〜1. 5mm用:的硅钢板冲片叠压钏紧而成,分为极身和极靴两部分,上面套励磁绕组的部分称为极身,下面扩宽的部分称为极靴,极靴宽于极身,既可以调整气隙中磁场的分布,乂便于固定励磁绕组。
励磁绕组用绝缘铜线绕制而成,套在主磁极铁心上。
整个主磁极用螺钉固定在机座上。
换向极换向极的作用是改善换向,减小电机运行时电刷与换向器之间可能产生的换向火花,一般装在两个相邻主磁极之间,山换向极铁心和换向极绕组组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L6203直流电机控制驱动器【简要说明】一、尺寸:长66mmX宽33mm X高28mm二、主要芯片:L6203三、工作电压:控制信号直流4.5~5.5V;驱动电机电压7.2~30V四、可驱动直流(7.2~30V之间电压的电机)五、最大输出电流4A六、最大输出功率20W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制一台直流电机6、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)7、可实现正反转8、此驱动器非常时候控制飞思卡尔智能车,驱动器压降小,电流大,驱动能力强。
【标注图片】直流电机的控制实例使用驱动器可以控制一台直流电机。
电机分别为OUT1和OUT2。
输入端EN可用于输入PWM脉宽调制信号对电机进行调速控制。
(如果无须调速可将EN使能端,接高低电平,高电平启动,低电平停止。
也可由单片机输出直接控制)实现电机正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,电机正转。
(如果信号端IN1接低电平,IN2接高电平,电机反转。
)可参考下图表:电机旋转方式控制端IN1控制端IN2EN使能端M 正转高低高反转低高高调速* * 输入PWM信号直流电机测试程序【原理图】【测试程序】/********************************************************************汇诚科技实现功能:调试程序使用芯片:AT89S52 或者 STC89C52晶振:11.0592MHZ编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技*********************************************************************/ #include<reg52.h>#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型sbit P2_0=P2^0;//启动sbit P2_1=P2^1;//停止sbit P2_2=P2^2;//正转sbit P2_3=P2^3;//反转sbit P1_0=P1^0;//使能sbit P1_1=P1^1;//IN1sbit P1_2=P1^2;//IN2/********************************************************************延时函数*********************************************************************/ void delay(uchar t)//延时程序{uchar m,n,s;for(m=t;m>0;m--)for(n=20;n>0;n--)for(s=248;s>0;s--);}/********************************************************************主函数*********************************************************************/ main(){while(1){if(P2_0==0){delay(3);if(P2_0==0)//启动{P1_0=1;P1_1=1;P1_2=0;}}if(P2_1==0){delay(3);if(P2_1==0)//停止{P1_0=0;}}if(P2_2==0){delay(3);if(P2_2==0)//正转{P1_1=1;P1_2=0;}}if(P2_3==0){delay(3);if(P2_3==0)//反转{P1_1=0;P1_2=0;}}}}/********************************************************************结束*********************************************************************/L6203DMOS(消耗型金属氧化物半导体)全控桥驱动器⏹供电电压:48V⏹最大峰值电流5A(L6021最大2A)⏹电流有效值:⏹L6201: 1A; L6202: 1.5A; L6203/L6201PS: 4A ⏹R DS (ON) 电阻值0.3 Ω (室温25 ︒C)⏹击穿电压保护⏹兼容TTL电路⏹运行最高频率100KHz⏹热滞⏹集成逻辑电路使用⏹高效概述L6201是一种应用多源BCD(Bipolar,CMOS,DMOS)技术来控制电机的全控桥驱动器芯片,这种芯片能将独立的DMOS场效应晶体管和CMOS以及二极管集成在一块芯片上。
由于使用模块化扩展技术,L6201可以实现逻辑电路及功率级的优化。
DMOS场效应管能在42V的电压下运行,同时具备高效、高速的切换性能。
兼容所有的TTL, CMOS and μC输入。
每个独立的逻辑输入能控制一个沟道(半桥),而公共的使能端可以控制两个沟道。
L 6201共有3中不同的封装型号。
多源BCD技术分类数据:L6201(SO20表面贴片)L6201PS(PowerSO20)L6202(双列直插封装18引脚)L6203(Multiwatt封装)结构图引脚连接图(俯视)引脚功能芯片名称功能L620 L6201PS L6202 L62031 16 1 10 SENSE 外接电阻,提供电机反馈控制电流2 17 2 11 ENABLE 高电平有效,选择IN1或者IN2接口3 2,3,9,12,18,193 N.C.不接线4.5 — 46 GND 公共接地端—1,10 5 GND 公共接地端6,7 — 6 GND 公共接地端8 —7 N.C. 不接线9 4 8 1 OUT2 第二个半桥的输出口10 5 9 2 V s 电源端11 6 10 3 OUT1 第一个半桥的输出口(续)注2:配置最小面积的铜片热特征参数(*)安装铝制基片电路板电气特性(测试电路参数:温度=25︒C ,,电压42V,传感电压0V,无别的特殊要求)电气特性(续)芯片控制逻辑时序符号参数试验条件最小典型最大单位t1(Vi) 源电流关断延迟时间图12 300 ns t2(Vi) 源电流关下降间图12 200 ns t3(Vi) 源电流导通延迟时间图12 400 ns t4(Vi) 源电流上升时间图12 200 ns t5(Vi) 反向电流关断延迟时间图13 300 ns t6(Vi) 反向电流下降时间图13 200 ns t7(Vi) 反向电流导通延迟时间图13 400 ns t8(Vi) 反向电流上升时间图13 200 ns (*)受限于功耗(**)在同步整流中的(L6202//03)VSD压降如图4所示;一般L6201的电压值是0.3V图1。
典型和Tj的示意图图2。
典型静态电流和频率的示意图图3。
典型Is和Vs的示意图图4。
典型Rds和Vref的示意图(Vref从Vs到Vref)图5。
正常状态(25°C)Rds的阻止与温度变化的示意图图6(a),同步整流下二极管的状态(L6201)图6(b),同步整流下二极管的状态(L6201PS/02/03)图7(a)。
典型功耗与IL的示意图(L6201)图7(b)。
典型功耗与IL的示意图(L6201PS/02/03)图8(a)。
两相斩波图8(b)。
单项斩波图8(c)。
使能端斩波测试电路图9。
饱和电压图10。
静态电流图11。
漏电流示意图图12。
源电流延迟时间及输入斩波示意图图13。
反偏电流延迟时间及斩波电路概述L6201/1PS/2/3是一种应用多源BCD(Bipolar,CMOS,DMOS)技术,用于电机切换驱动的整块全桥芯片。
多源BCD技术是集成多个或者单独的DMOS场效应晶体管,另外还混合MOS管/二极管的控制电路。
通过使用这种技术使得这类芯片具备兼容所有TTL,COMS和 C并且可以消除外部MOS设备的驱动问题。
逻辑驱动图如表1所示。
表1输入 场效应管的输出(*) VEN=LIN1 IN2 LL H HL H L H Sink1,Sink2 Sink1,Source2 Source1,Sink2 Source1.Source2 VEN=LXX所有场效应管关断L 表示低电平 H 表示高电平 X 表示任意状态 (*)INPUT1和INPUT2是控制器的数字输出级 虽然L6201/1PS/2/3这类芯片能保证被击穿的情况的发生,但是不能避免由于DMOS 管配置二极管的内部结构而引起的强电流产生的检测热量。
这种现象的产生主要是由于与节点组合的C1和C2两个电容充放电(如图14)。
当输出有高电平向低电平转换的时候,一股的尖峰电流注入电容C1。
在低电平向高电平转化的过程中同样有一股大的尖峰电流注入电容C2,底部DMOS 场效应管的输入电容的充电导致在尖峰电流之前有电极性的跳变(如图15)。
图14.DMOS 场效应管的内部结构图15.在检测引脚的尖峰电流刘示意图晶体管的运转导通状态当DMOS 的其中一端处于到通的状态,那么可以说电阻RDS(ON)始终处于能操控的范围。
在此期间的功耗的表达式:P ON = R DS (ON) ⋅ I DS2 (RMS)多源BCD 过程的低阻态电阻RDS(ON) 在低功耗的情况选能提供高电流关断状态当DOMS 的其中一端关断的时候,那么V DS 的电压等于电压源的电压,同时只有漏电流I DSS 存在。
此间的功耗有如下的公式:P OFF = V S ⋅ I DSS此时的功耗十分低,较导通时候的功耗是可以被忽略的 晶体管几乎可以发现,上述的晶体管的源极和沟道间内置二极管,二极管运行在一种快速,任意方向的切换模式。
在下次循环之前,使能端处于与高电平的状态,电压降等于电阻(R DS (ON))电流(I D )的乘积直到达到二极管的正向偏置电压。
当使能端是低电平时,场效应管关断,同时所有电流施加于二极管。
在反复循环的过渡时期的功率取决于电压—电流的波形以及驱动方式(如图7(a),(b),图8(a),(b),(c))P trans. = I DS (t) ⋅ V DS (t)自举电容只有所有的N 沟道在10V 的栅极电压下才能够确保DMOS 晶体管的正确驱动。
对于底部的接地晶体管来说很容易证明,但是上部的晶体管显然需要一个更高的驱动电压。
当达到内置充电电流的达到峰值的时候能结合自举电容正确驱动。
为了充电能够有效的进行,自举电容的值应当大于1nF 的晶体管的输入电容。
所以自居电容至少是10nF 的。