一种直流电机H桥驱动电路设计
H桥直流电机驱动控制电路设计

强型场 效应管 构建 H桥 , 现 大功 率直 流 电机 驱 实
、c 乏 PW M ห้องสมุดไป่ตู้
图 1 电路 原 理 框 图
在 大功率 驱 动系统 中 , 驱 动 回路 与 控制 回 将 路 电气 隔离 , 少 驱 动 控制 电路对 外 部控 制 电路 减 的干扰 。隔离后 的控 制信 号经 电机 驱动 电路产 生 电机逻辑 控制 信号 , 分别 控 制 H 桥 的上下 臂 。驱 动 H 桥功率 驱 动电路来 驱动 直流 电机 。
率 M SE O F T构 成 H 桥 电路 的桥 臂 。H 桥 电路 中
的 4个 功率 MO F T分 别 采用 N沟 道 型 和 P沟 SE 道型 , P沟道 功率 MO F T一般 不 用 于下 桥 臂 而 SE
在驱 动控制 电路 中, H桥 由 4个 N沟 道 功率 MO F T组 成 。若 要控 制 各个 MO F T, MO — SE SE 各 S F T的 门极 电压必 须足够 高 于栅 极 电压 。通 常 要 E
使 MO F T完全可靠 导通 , 门极 电压一 般在 l SE 其 0
V以上 , V >1 即 0V。对 于 H桥下 桥 臂 , 接 施 直
加 1 OV以上 的 电压 即可使 其导 通 ; 而对 于上桥 臂 的 2个 MO F T, SE 要使 V s 0V, G >1 就必 须 满 足 V c
> +l 即驱动 电路 必 须 能提供 高 于 电源 电 V 0V, 压 的电压 , 就要求 驱 动电路 中增设升 压 电路 , 这 提 供高 于栅极 1 0V的 电压 。
路 , Q 导通 , 此 同时 电源 电压 (+1V) 自 使 : 在 2 经
直流电机(H桥)驱动电路

一、H桥驱动电路图4.12中所示为一个典型的直流电机控制电路。
电路得名于“H桥驱动电路”是因为它的形状酷似字母H。
4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。
如图所示,H桥式电机驱动电路包括4个三极管和一个电机。
要使电机运转,必须导通对角线上的一对三极管。
根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。
图4.12 H桥驱动电路要使电机运转,必须使对角线上的一对三极管导通。
例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经 Q4回到电源负极。
按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。
当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
图4.13 H桥电路驱动电机顺时针转动图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。
当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。
图4.14 H桥驱动电机逆时针转动二、使能控制和方向逻辑驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。
如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。
此时,电路中除了三极管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。
基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。
图4.155 所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。
4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。
而2个非门通过提供一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。
h桥mos直流电机驱动电路_解释说明以及概述
h桥mos直流电机驱动电路解释说明以及概述1. 引言1.1 概述本文将深入探讨H桥MOS直流电机驱动电路的原理、优势和应用案例分析,并介绍设计和优化时需要考虑的因素。
H桥MOS直流电机驱动电路是一种常见且重要的电路,广泛应用于各个领域,如家用洗衣机、无人驾驶汽车以及工业自动化设备等。
通过对该电路的研究,可以更好地理解其工作原理,为日后的设计提供指导。
1.2 文章结构文章由以下几个部分组成:引言、H桥MOS直流电机驱动电路解释说明、H桥MOS直流电机驱动电路的应用案例分析、H桥MOS直流电机驱动电路设计和优化考虑因素以及结论。
在引言部分,我们将对本文内容进行简要概括,并介绍各个部分的内容安排。
1.3 目的本文的目标在于全面解释和说明H桥MOS直流电机驱动电路,包括其原理、优势和工作原理。
同时,还将通过详细分析多个应用案例来展示该类型电路在实际应用中的作用和重要性。
此外,我们还将介绍设计和优化该电路时需要考虑的因素,并展望未来H桥MOS直流电机驱动电路可能的发展方向。
通过本文的阐述,读者将能够掌握有关H桥MOS直流电机驱动电路的基础知识,并为相关领域的实际应用提供参考依据。
2. H桥MOS直流电机驱动电路解释说明2.1 H桥MOS电路原理H桥MOS直流电机驱动电路是一种常见的电路,用于控制直流电机的旋转方向和速度。
它由四个功率开关MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor)组成,通常配对使用,以构成两个互补开关对。
H桥MOS电路采用了全可控技术,通过不同的开关组合来改变电流流向、极性和大小。
当第一个互补开关导通时, 电机的正极与供电源相连, 而负极与地连接;而当第二个互补开关导通时, 两者则互换。
2.2 H桥MOS直流电机驱动的优势H桥MOS直流电机驱动具有以下几个优势:首先,它能够实现双向控制。
通过调整开关的状态,可以改变电机的旋转方向,使其正反转自如。
h桥直流电机驱动电路

h桥直流电机驱动电路
H桥直流电机驱动电路是一种常见的电机驱动电路,通常用于直流电机的控制。
该电路由四个开关管组成,其中两个开关管被连接到一个电极,另外两个开关管被连接到相反的电极。
通过控制这四个开关管的开关状态,可以控制电机的转速和方向。
H桥直流电机驱动电路的主要优点在于它可以控制电机的正反转,而且可以实现PWM调速,使得电机在不同的转速下运转。
此外,H桥电路的输出电压可以高于电源电压,从而提高电机的动态性能。
然而,H桥直流电机驱动电路也存在一些缺点。
首先,由于四个开关管需要按照一定的规律开关,电路的控制较为复杂。
其次,由于开关管的开关速度有限,电路的响应速度也受到一定的限制。
此外,H桥电路还存在反电动势的问题,需要特殊的保护电路进行处理。
总的来说,H桥直流电机驱动电路是一种广泛应用的电机驱动电路,可以控制电机的转速和方向,并且具有较好的动态性能。
但是,需要注意电路的控制和保护问题,以确保电路的可靠性和安全性。
- 1 -。
一种H桥驱动电路原理与设计
一种 H 桥驱动电路原理与设计
文/庄武良 代允
摘
本文 H 要 桥的上桥,能够实现电流的输入
输出控制,两路互补 PWM 信号分
别控制上下两个开关管互补导通,
并对相应的实验装置和控制方法
进行实验测试。
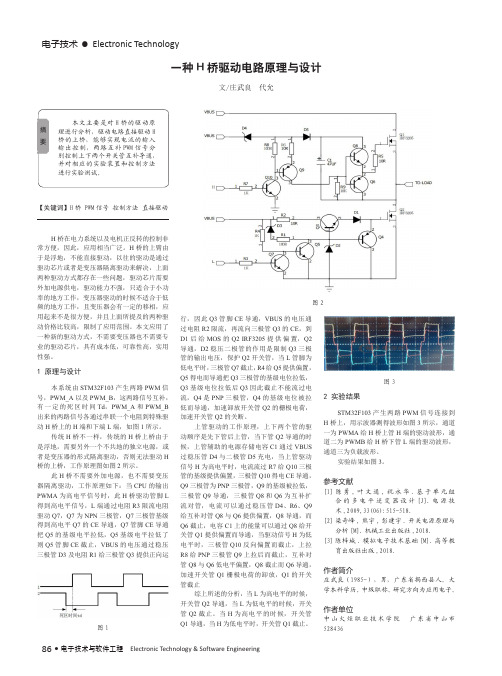
此 H 桥不需要外加电源,也不需要变压 器隔离驱动,工作原理如下:当 CPU 的输出 PWMA 为高电平信号时,此 H 桥驱动管脚 L 得到高电平信号,L 端通过电阻 R3 限流电阻 驱动 Q7,Q7 为 NPN 三极管,Q7 三极管基级 得到高电平 Q7 的 CE 导通,Q7 管脚 CE 导通 把 Q5 的基级电平拉低,Q5 基级电平拉低了 则 Q5 管脚 CE 截止,VBUS 的电压通过稳压 三极管 D3 及电阻 R1 给三极管 Q3 提供正向运
上管驱动的工作原理,上下两个管的驱
动顺序是先下管后上管,当下管 Q2 导通的时 候,上管辅助的电源存储电容 C1 通过 VBUS 过稳压管 D4 与二极管 D5 充电,当上管驱动 信号 H 为高电平时,电流流过 R7 给 Q10 三极 管的基级提供偏置,三极管 Q10 得电 CE 导通, Q9 三极管为 PNP 三极管,Q9 的基级被拉低, 三极管 Q9 导通,三极管 Q8 和 Q6 为互补扩 流 对 管, 电 流 可 以 通 过 稳 压 管 D4、R6、Q9 给互补对管 Q8 与 Q6 提供偏置,Q8 导通,而 Q6 截止,电容 C1 上的能量可以通过 Q8 给开 关管 Q1 提供偏置而导通,当驱动信号 H 为低 电平时,三极管 Q10 反向偏置而截止,上拉 R8 给 PNP 三极管 Q9 上拉后而截止,互补对 管 Q8 与 Q6 低电平偏置,Q8 截止而 Q6 导通, 加速开关管 Q1 栅极电荷的卸放,Q1 的开关 管截止
H桥式电路驱动无刷直流电机的设计
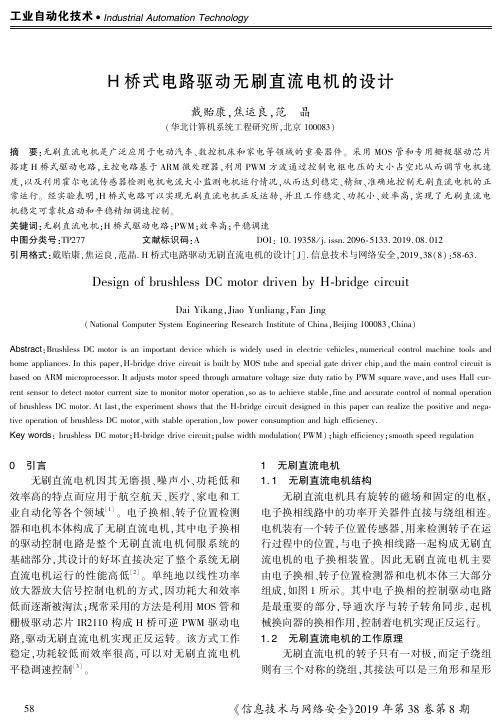
H桥式电路驱动无刷直流电机的设计戴贻康ꎬ焦运良ꎬ范㊀晶(华北计算机系统工程研究所ꎬ北京100083)摘㊀要:无刷直流电机是广泛应用于电动汽车㊁数控机床和家电等领域的重要器件ꎮ采用MOS管和专用栅极驱动芯片搭建H桥式驱动电路ꎬ主控电路基于ARM微处理器ꎬ利用PWM方波通过控制电枢电压的大小占空比从而调节电机速度ꎬ以及利用霍尔电流传感器检测电机电流大小监测电机运行情况ꎬ从而达到稳定㊁精细㊁准确地控制无刷直流电机的正常运行ꎮ经实验表明ꎬH桥式电路可以实现无刷直流电机正反运转ꎬ并且工作稳定㊁功耗小㊁效率高ꎬ实现了无刷直流电机稳定可靠软启动和平稳精细调速控制ꎮ关键词:无刷直流电机ꎻH桥式驱动电路ꎻPWMꎻ效率高ꎻ平稳调速中图分类号:TP277㊀㊀㊀㊀㊀㊀文献标识码:A㊀㊀㊀㊀㊀㊀DOI:10.19358/j.issn.2096 ̄5133.2019.08.012引用格式:戴贻康ꎬ焦运良ꎬ范晶.H桥式电路驱动无刷直流电机的设计[J].信息技术与网络安全ꎬ2019ꎬ38(8):58 ̄63.DesignofbrushlessDCmotordrivenbyH ̄bridgecircuitDaiYikangꎬJiaoYunliangꎬFanJing(NationalComputerSystemEngineeringResearchInstituteofChinaꎬBeijing100083ꎬChina)Abstract:BrushlessDCmotorisanimportantdevicewhichiswidelyusedinelectricvehiclesꎬnumericalcontrolmachinetoolsandhomeappliances.InthispaperꎬH ̄bridgedrivecircuitisbuiltbyMOStubeandspecialgatedriverchipꎬandthemaincontrolcircuitisbasedonARMmicroprocessor.ItadjustsmotorspeedthrougharmaturevoltagesizedutyratiobyPWMsquarewaveꎬandusesHallcur ̄rentsensortodetectmotorcurrentsizetomonitormotoroperationꎬsoastoachievestableꎬfineandaccuratecontrolofnormaloperationofbrushlessDCmotor.AtlastꎬtheexperimentshowsthattheH ̄bridgecircuitdesignedinthispapercanrealizethepositiveandnega ̄tiveoperationofbrushlessDCmotorꎬwithstableoperationꎬlowpowerconsumptionandhighefficiency.Keywords:brushlessDCmotorꎻH ̄bridgedrivecircuitꎻpulsewidthmodulation(PWM)ꎻhighefficiencyꎻsmoothspeedregulation0㊀引言无刷直流电机因其无磨损㊁噪声小㊁功耗低和效率高的特点而应用于航空航天㊁医疗㊁家电和工业自动化等各个领域[1]ꎮ电子换相㊁转子位置检测器和电机本体构成了无刷直流电机ꎬ其中电子换相的驱动控制电路是整个无刷直流电机伺服系统的基础部分ꎬ其设计的好坏直接决定了整个系统无刷直流电机运行的性能高低[2]ꎮ单纯地以线性功率放大器放大信号控制电机的方式ꎬ因功耗大和效率低而逐渐被淘汰ꎻ现常采用的方法是利用MOS管和栅极驱动芯片IR2110构成H桥可逆PWM驱动电路ꎬ驱动无刷直流电机实现正反运转ꎮ该方式工作稳定ꎬ功耗较低而效率很高ꎬ可以对无刷直流电机平稳调速控制[3]ꎮ1㊀无刷直流电机1.1㊀无刷直流电机结构无刷直流电机具有旋转的磁场和固定的电枢ꎬ电子换相线路中的功率开关器件直接与绕组相连ꎮ电机装有一个转子位置传感器ꎬ用来检测转子在运行过程中的位置ꎬ与电子换相线路一起构成无刷直流电机的电子换相装置ꎮ因此无刷直流电机主要由电子换相㊁转子位置检测器和电机本体三大部分组成ꎬ如图1所示ꎮ其中电子换相的控制驱动电路是最重要的部分ꎬ导通次序与转子转角同步ꎬ起机械换向器的换相作用ꎬ控制着电机实现正反运行ꎮ1.2㊀无刷直流电机的工作原理无刷直流电机的转子只有一对极ꎬ而定子绕组则有三个对称的绕组ꎬ其接法可以是三角形和星形图1㊀无刷直流电机结构(带中心点与不带中心点)等ꎬ而通电方式分为两相通电模式㊁三相通电模式以及两者混合的通电模式[4]ꎮ两相通电模式就是电机三个绕组中的其中两相导通ꎬ剩余一相关闭ꎻ三相通电模式则是三相同时导通电流ꎬ有一相的电流是反相ꎻ混合的通电模式中ꎬ以交替的三相㊁两相进行通电ꎮ选用常用的三相通电驱动ꎬ接法则采用星形和三角形形式ꎮ每相绕组的导通率是可以设定的ꎬ有60ʎ㊁120ʎ和360ʎ等ꎬ对于桥式电路的换相电路来说ꎬ最佳的导通角度是120ʎꎬ其常见的三相桥式电路如图2所示ꎮ图2㊀无刷直流电机的H桥式驱动电路逻辑控制信号按照一定的导通次序和规则进行上面的6个MOS管的导通与关闭ꎬ从而控制电机的运行ꎮ例如ꎬ以K1K4 ̄K1K6 ̄K3K6 ̄K3K2 ̄K5K2 ̄K5K4 ̄K1K4的导通顺序进行MOS管的控制ꎮ每个时刻上下臂的MOS管只有一个导通ꎬ以交叉的方式进行ꎬ形成三相六状态ꎮ在控制系统中ꎬ理想状态下的无刷直流电机只需PWM方波驱动ꎬ并且在换向时刻检测出转子的位置ꎬ就可以实现顺利的绕组电流换向ꎮ1.3㊀无刷直流电机的驱动方式无刷直流电机的驱动控制方式中ꎬ整体上分为三类:以继电器为主的功率级线性控制电路ꎻ以集成电机驱动芯片(如L298N)为主的简单控制电路ꎻ以MOS管和栅极驱动芯片搭建桥式驱动电路的可靠稳定控制电路ꎮ在大电流工作的电机电路中ꎬ要实现对电机的功率级控制ꎬ并且保持实时性要求在毫秒级以下时ꎬ通常采用继电器的驱动方式ꎮ使用两个单刀双掷开关间歇性工作就可以实现电机的正反控制ꎬ如图3所示ꎮ图3㊀继电器控制电路集成电机驱动芯片是专门用于驱动电机的集成电路ꎬ只需连接几个简单的控制信号便可以直接控制电机的正反转ꎮ其中ꎬL298N内部包含4通道逻辑驱动电路ꎬ接收标准TTL逻辑电平信号ꎬ是一种典型的二相和四相电机专用驱动器[5]ꎮ其设计电路如图4所示ꎮ以MOS管和栅极驱动芯片为主ꎬ搭建起H桥式可逆PWM驱动电路是现在通常采用的无刷直流电机驱动方式ꎮ因为其功率可控ꎬ高效而又可靠ꎬ同时可以平稳控制电机的转速而广泛应用于多种场合ꎮ2㊀H桥式驱动电路的设计2.1㊀总体设计H桥式驱动电路主要由STM32芯片及其外围的基础电路㊁MOSFET开关电路和无刷直流电机组成ꎮ当H桥式驱动电路接收到主控芯片STM32发来的控制命令时ꎬ安全回路使能开启MOSFET开关电路工作ꎬ按照一定的导通次序工作使电机运转ꎮ在电机的母线上采样的电机电流经电传感器和位置传感器取样后ꎬ进行相应的运算ꎬ调整电机的转速与力矩ꎬ使其平稳地按需运转ꎮ总体的框架图如图5所示ꎮ2.2㊀PWM调速控制电机的转速控制可以分为励磁控制法和电枢控制法[6]ꎮ励磁控制法是控制三相导通的磁通量ꎬ低速时受到磁饱和限制ꎬ高速时则受到换相火花和换向结构强度的限制ꎬ导致其控制功率小㊁效率低ꎬ进而使其应用较少ꎮ更多采用的还是电枢电压控制法ꎬ图4㊀L298N驱动电路图5㊀H桥式驱动电路总体框架其中PWM(脉宽调制)便是常见的一种调速方法ꎮPWM调速的基本原理就是按照一个固定频率(方波)波形来接通和断开电源ꎬ并根据需要改变一个周期内接通和断开的时间占比比例(占空比)来改变电机电枢上的电压 1 和 0 的占比比例ꎬ从而改变接通电机的平均电压ꎬ控制电机运转的转速ꎮ采用计数PWM的方波周期个数来检测电机的运行速度ꎬ从而实现对电机的平稳控制ꎬ启动和停止时对电机运行系统的冲击微小ꎬ启动功耗低ꎬ实现无刷直流电机的平稳顺利运行ꎮ2.3㊀H桥式驱动电路设计作为开关器件的晶体管器件一般选择功率击穿现象等特点ꎬ符合电机频繁开关控制的需求ꎮ常用4个功率MOS管组成2对上下臂H形状的桥式电路ꎬ该电路设计简单ꎬ成本低廉ꎬ易于实现ꎮ因此一侧MOS管的上下管间断导通ꎬ与另外一侧的上下管形成对角MOS管导通形式ꎬ在PWM驱动下按时序进行两个对角管的轮流导通ꎬ就形成了两个方向的电流流向ꎬ也就驱动电机实现正反转ꎮ本文选用6个MOSFET或者IGBT构成三相120ʎ桥式逆变电路ꎮ功率器件选用IR公司的IR ̄FP460A管ꎬ导通电阻只有0.22Ωꎬ漏极电流最大20AꎬVdss为500Vꎬ导通时间为50ns左右ꎻ驱动隔离芯片则采用IR2110ꎬ供电电压为10~20Vꎬ电气隔离电压高达2500Vꎬ逻辑供电电压则为3.3~20Vꎬ采用自举悬浮的形式驱动MOS管导通ꎬ并且内部含有电压比较保护㊁过流保护等电路ꎬ确保驱动电路的简单可靠ꎮ其中一个MOSFET驱动逻辑电路和全桥式逆变电路分别如图6和图7所示ꎮ图6㊀驱动逻辑电路㊀㊀以6n137高速光耦为电气隔离器件ꎬ实现对来自STM32发出的PWM信号与电机的驱动部分进行隔离ꎬ防止电机转动产生的扰动噪声和尖峰电压串入主芯片ꎬ引起芯片工作异常而使系统瘫痪ꎮ其输出信号再接入IR2110驱动芯片ꎬ作为启动芯片工作的控制信号ꎮ与单纯地采用继电器的驱动方式比较ꎬ该方法隔离出高压㊁模拟信号ꎬ减少了模拟信号对MOS管控制信号的影响ꎬ同时降低了线圈的电流损耗ꎬ电流负载效率得到提高ꎮ三相绕组端U㊁V㊁W分别连接到两个大功率MOSFET组成三相全桥电路ꎬ在任意一个状态下都是两相串联导通ꎬ一相为正ꎬ另外一相为负ꎬ第三相对应的桥臂上的两个MOSFET都关断ꎮ如按照UV ̄UW ̄图7㊀桥式驱动电路VW的方式进行导通与关闭ꎮ其中C2㊁C5㊁C8分别为一相绕组的上桥臂MOS管导通提供自举电压ꎬR3㊁R8㊁R12阻值选择15kΩꎬ为上桥臂MOS管Q3㊁Q5㊁Q4的反向导通和死区之间的无导通提供一个泄放通路ꎬ保护MOS管不会因此而发生损坏ꎮ同样TVS管D1㊁D2㊁D5㊁D7㊁D8㊁D9分别为六个功率管的漏源级之间的电压保护器件ꎬ防止外界高压串入击穿功率管ꎮ此电路与基于L298N的专用电机驱动芯片电路相比较ꎬ可以通过调整连接在MOS管漏级上的电阻大小来控制导通电流大小ꎬ使其工作在饱和状态和防止共态导通ꎬ提高电路的电流负载效率ꎮ2.4㊀电机电流检测电路电机的工作电流是无刷直流电机运行过程中一个很重要的检测参数ꎬ可以反映伺服电机功率与负载的变化[7]ꎮ在对伺服电机的控制中ꎬ母线上的电机电流变化就是一个重要的控制量ꎬ同时也设置了过流保护ꎬ防止系统出现过电流现象而导致异常ꎮ传统的电流检测方法大多是读取电阻上的电压来得到采样电流ꎬ或者是接入专门的电流检测表读取数值ꎬ简单易行ꎬ成本较低ꎬ但是考虑到电机电流较大(达到几安级别)ꎬ采样电阻的发热严重ꎬ阻值也会发生变化ꎬ导致检测的精度变低ꎬ功耗增大ꎬ并且没有电气上的完全隔离装置ꎬ易出现电机上的变化电流串入其中ꎬ影响电流的准确采样ꎮ因此采用霍尔电流传感器对电机电流进行精确采样[8]ꎮHXS20 ̄NP是一种高精度㊁带电气隔离㊁低功耗的电流传感器ꎬ被广泛应用于工业控制领域对电流的精确采样㊁载荷检测和过电流故障检测等控制场合ꎮ该传感器通过专用放大器和滤波器实现传感器的降噪ꎬ采用专用的电流导体和晶片间的电容耦合ꎬ可有效防止应用中的配置漂移ꎮ电流检测电路如图8所示ꎮ图8㊀电机电流检测电路㊀㊀伺服电机母线上的电流从传感器的1脚接入㊁8脚流出ꎬ11脚输出的电压值ADC_OUT得到采样的电压ꎮ该电压与流入的电流成一定的比例关系ꎬ经两个测量电阻STM32的ADC0端口ꎬ根据一定的比例公式计算得到电机电流ꎮ3 无刷直流电机的运行结果根据H桥式驱动电路的设计搭建起无刷直流电机的实验平台ꎬ通过观察无刷直流电机的运行情况ꎬ验证该驱动方式下无刷直流电机的运行特点ꎮ无刷直流电机上的编码器波形如图9所示ꎮ图9㊀编码器波形示波器上出现两个频率为250Hz的方波波形ꎬ表示编码器的A㊁B两相的波形ꎮ两相正交相差90ʎ表明电机正常运行ꎬ再根据两者的超前与滞后关系从而判断电机的正转与反转ꎮ可以观察到两个波形都有一定的毛刺ꎬ增加滤波㊁去噪电路ꎬ以及提高流经电机母线上的负载电流ꎬ可以消除毛刺和上下冲等干扰信号ꎬ从而更加稳定低控制电机的运行ꎮ测量电机的码盘角度和电机电流曲线如图10和图11所示ꎮ图10㊀电机码盘角度曲线电机码盘的曲线近似于一条直线ꎬ随着电机的开始运行ꎬ电机的码盘角度随时间增长ꎮ在最初的图11㊀电机电流曲线1~2s内ꎬ增长得非常快ꎻ2s之后随着电机运行的稳定ꎬ电机码盘的角度增加开始变缓ꎬ说明电机运行逐步变得平稳ꎮ电机的电流是类似于一个方波的曲线ꎬ并且有正负值之分ꎬ正值 1.5A 表明电机在此段时间是处于一个正转的状态ꎻ负值 -1.5A 则表明电机处于反转的状态ꎮ所占时间的长短也表明了PWM的占空比大小ꎬ当调速的PWM波形的占空比发生变化ꎬ经H桥式驱动电路后控制了电机的运行变化ꎬ也就是反映在电机电流曲线的变化之上ꎮ将上文提到的采用L298N的电机驱动电路与本文提出的设计电路的实验ꎬ结果如表1所示ꎮ表1㊀驱动电路比较驱动电路12V电机24V电机电流/A效率/%电流/A效率/%L298N1.95782.0180H桥式1.71851.8390可以看出ꎬH桥式驱动电路的电机电流较小ꎬ其效率却较高ꎬ比L298N驱动电路高出10%左右ꎮ因此得出结论:H桥式驱动电路驱动无刷直流电机正反运转ꎬ功耗小而效率高ꎬ实现了无刷直流电机稳定可靠软启动和平稳调速控制ꎮ4㊀结束语通过对无刷直流电机的介绍和对其工作原理的理解ꎬ根据PWM调制模式对电机速度进行调整ꎬ设计H桥式的MOS管驱动电路和电机电流检测电路ꎬ测量出此驱动模式下电机的运行曲线ꎬ从而证明了利用H桥式电机驱动芯片IR2110构成H桥可逆PWM驱动电路ꎬ功耗大大降低而效率极大提高ꎬ并且实现了无刷直流电机稳定可靠软启动和平稳调速控制ꎮ参考文献[1]谭建成ꎬ邵晓强.永磁无刷直流电机技术[M].北京:机械工业出版社ꎬ2018.[2]查普曼.电机原理及驱动:电机学基础[M].北京:清华大学工业出版社ꎬ2008.[3]伍洲ꎬ方彦军.IR2110在电机驱动器设计中的应用[J].新器件应用ꎬ2007ꎬ9(9):17 ̄20.[4]王华权.基于DSP的无刷直流电动机控制系统的研究[D].武汉:武汉科技大学ꎬ2006.[5]雷红淼ꎬ程耀瑜.基于L298N的直流电机驱动电路设计优化[J].数字技术与应用ꎬ2012(2):118 ̄120. [6]张相军ꎬ陈伯时.无刷直流电机控制系统中PWM调制方式对换相转矩脉动的影响[J].电机与控制学报ꎬ2003ꎬ6(2):87 ̄91.[7]王娟.基于RBF的无刷直流电机直接电流控制与转矩分析[D].天津:天津大学ꎬ2003.[8]陈永华.霍尔效应在无刷直流电机控制中的应用[J].实验科学与技术ꎬ2011ꎬ4(2):34 ̄36.(收稿日期:2019 ̄05 ̄27)作者简介:戴贻康(1991-)ꎬ男ꎬ硕士ꎬ主要研究方向:无线通信㊁嵌入式硬件开发ꎮ焦运良(1985-)ꎬ男ꎬ硕士ꎬ主要研究方向:基于纯国产化的控制系统ꎮ范晶(1987-)ꎬ男ꎬ硕士ꎬ主要研究方向:计算机网络与安全ꎮ。
步进电机H桥功率驱动电路设计
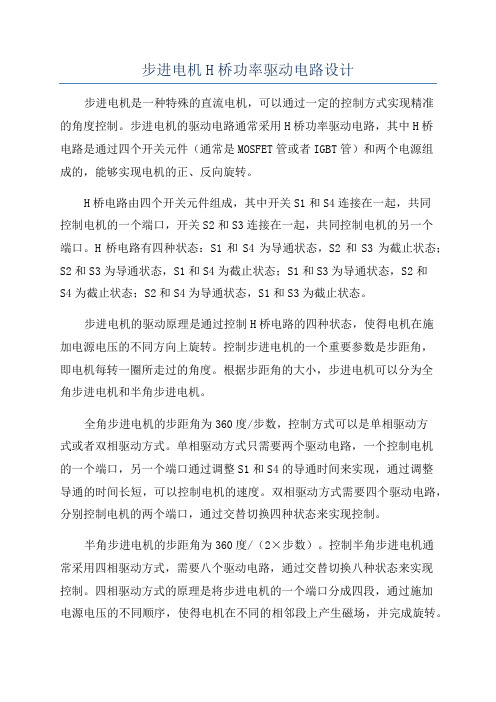
步进电机H桥功率驱动电路设计步进电机是一种特殊的直流电机,可以通过一定的控制方式实现精准的角度控制。
步进电机的驱动电路通常采用H桥功率驱动电路,其中H桥电路是通过四个开关元件(通常是MOSFET管或者IGBT管)和两个电源组成的,能够实现电机的正、反向旋转。
H桥电路由四个开关元件组成,其中开关S1和S4连接在一起,共同控制电机的一个端口,开关S2和S3连接在一起,共同控制电机的另一个端口。
H桥电路有四种状态:S1和S4为导通状态,S2和S3为截止状态;S2和S3为导通状态,S1和S4为截止状态;S1和S3为导通状态,S2和S4为截止状态;S2和S4为导通状态,S1和S3为截止状态。
步进电机的驱动原理是通过控制H桥电路的四种状态,使得电机在施加电源电压的不同方向上旋转。
控制步进电机的一个重要参数是步距角,即电机每转一圈所走过的角度。
根据步距角的大小,步进电机可以分为全角步进电机和半角步进电机。
全角步进电机的步距角为360度/步数,控制方式可以是单相驱动方式或者双相驱动方式。
单相驱动方式只需要两个驱动电路,一个控制电机的一个端口,另一个端口通过调整S1和S4的导通时间来实现,通过调整导通的时间长短,可以控制电机的速度。
双相驱动方式需要四个驱动电路,分别控制电机的两个端口,通过交替切换四种状态来实现控制。
半角步进电机的步距角为360度/(2×步数)。
控制半角步进电机通常采用四相驱动方式,需要八个驱动电路,通过交替切换八种状态来实现控制。
四相驱动方式的原理是将步进电机的一个端口分成四段,通过施加电源电压的不同顺序,使得电机在不同的相邻段上产生磁场,并完成旋转。
步进电机的驱动电路设计需要考虑以下几个问题:1.驱动电路的工作电压范围,要能适应电机的额定电压以及工作电压波动范围。
2.驱动电路的开关元件的选型,要能够满足电流和功率的要求,并具有足够的开关速度。
3.驱动电路的保护措施,要考虑过流、过热等异常情况的保护。
比较好的电机驱动H桥设计

H桥电路设计一.PWM调速直流电机驱动电路的设计目标本电路设计是为了满足机器人走行电机的各种需求,例如PWM信号输入,很大的瞬间电流等要求。
制定的设计目标如下:1.功率电路对其输入端有良好的信号隔离,防止有高电压大电流进入主控电路;2.MOS管组成的H桥电机驱动电路,具有高效率和防止共态导通出现的功能;3.只引出两个控制端,即PWM和方向信号,控制简单;4.除了隔离的数字部分,整个电路只采用24V供电(也可接12V);5.电路所能承受的电流(瞬间电流)足够大,以适应频繁的换向动作和意外别死电机的情况发生;6.电路可靠性高,电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。
二.电路组成此电路共由四部分构成:输入输出部分,光电隔离部分,方向端控制引出部分,H桥部分,分述如下:1.输入输出部分输入的控制信号:PWMU信号,方向信号DRU(U表示未经过隔离)隔离所需的外部数字电源VCCEXTMODE,DATA,CLK,STROBE(供3958和3959共用的管脚)(后没有使用)输出的控制信号:两个输出OUT1,OUT2接电机电源供给:给电机供电的24V电源:24V,GND给光耦供电的5V数字电源:5V,GS(实际GND与GS共地)输入输出使用一个8pin插座2.光电隔离部分PWM信号采用高速光耦6N137,方向信号采用一般光耦TLP521-1,此光耦隔离电路参考了上届主机板上的设计,隔离过的信号为PWM和方向信号DR接入H桥电路。
3.方向端控制的引出为了控制方便,应设计出只有一个使能输入和一个方向控制信号。
使能信号即PWM信号,经过隔离接入比较器的输入端即可。
使电路达到PWM有信号时电机转动,PWM无信号为0时,电机停转。
而方向信号的引入应达到这样的效果:当方向信号为TTL高电平时,电流由OUT1流入OUT2,电机正转;方向信号为TTL低电平时,电流方向变化,由OUT2流入OUT1,电机反转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种直流电机H桥驱动电路设计
该电路采用NMOS 场效应管作为功率输出器件,设计并实现了较大功率的直流电机H 桥驱动电路,并对额定电压为24 伏,额定电流为3.8A 的
25D60-24A 直流电机进行闭环控制,电路的抗干扰能力强,在工业控制领域
具有较强的适用性。
许多半导体公司推出了直流电机专用驱动芯片,但这些芯片多数只适合小功率直流电机,对于大功率直流电机的驱动,其集成芯片价格昂贵。
在直流电机驱动电路的设计中,主要考虑一下几点:
1. 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机
即可,当电机需要双向转动时,可以使用由4 个功率元件组成的H 桥电路或者使用一个双刀双掷的继电器。
如果不需要调速,只要使
用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。
2. 性能:对于PWM 调速的电机驱动电路,主要有以下性能指标。
1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。
要提高
电路的效率,可以从保证功率器件的开关工作状态和防
止共态导通(H 桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。
3)对控制输入端的影响。
功率电路对其输入端应有良好的信号隔离,防止有
高电压大电流进入主控电路,这可以用高的输入阻抗或
光电耦合器实现隔离。