磁流变阻尼器结构参数对汽车悬挂系统减振效果的影响与分析
磁流变阻尼器与磁悬浮系统并联隔振研究
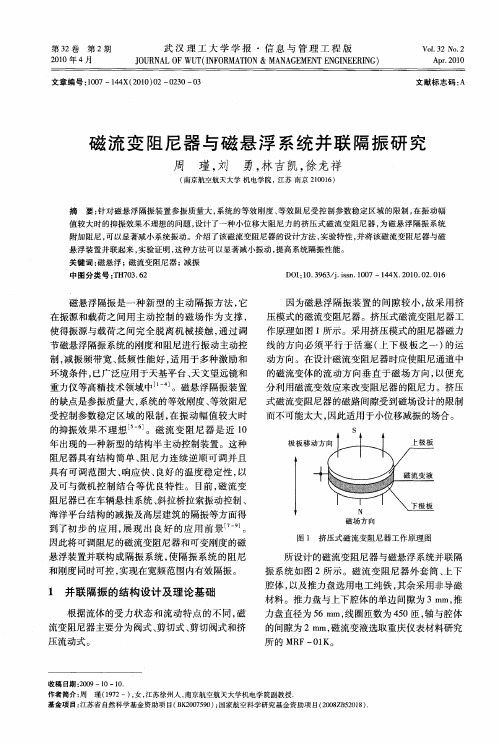
流变阻尼器主要分为阀式、 剪切式 、 剪切阀式和挤 压流动 式 。
收 稿 日期 :0 9—1 20 0一l . 0
作者简介 : 瑾 (9 2一) 女 , 周 17 , 江苏徐州人 , 南京航空航天大学机电学院副教 授. 基金项 目: 江苏省 自然科学基金资助项 目( K 07 9 ) 国家航空科学研究基金资助项 目(0 8 B 2 1 ) B 2 05 0 ; 2 0 Z 5 08
值较大时 的抑振效果不理想的问题 , 设计 了一种小位移大阻尼力 的挤压式磁 流变阻尼器 , 为磁悬 浮隔振系统 附加阻尼 , 以显著减小系统振动 。介绍 了该磁流变阻尼器 的设 计方法 , 可 实验特性 , 并将该磁 流变 阻尼器与磁 悬浮装置并联起来 , 实验证 明, 种方法可 以显著减小振动 , 这 提高系统 隔振性 能。
磁 场 方 向
图 1 挤压式磁流变阻尼器工作原理图
所设 计 的磁流 变阻尼 器 与磁悬 浮系统 并联 隔 振 系统 如 图 2所 示 。磁 流变 阻 尼 器外 套 筒 、 上下
1 并联隔振的结构设计及理论基础
根 据 流体 的受 力状 态 和 流 动 特点 的不 同 , 磁
腔体 , 以及推力盘选用 电工纯铁 , 其余采用非导磁 材料。推力盘与上下腔体的单边间隙为 3m 推 m, 力盘直径为 5 m, 6m 线圈匝数为 40匝, 5 轴与腔体 的间隙为 2m 磁流变液选取重庆仪表材料研究 m,
第3 2卷
第 2期
周
瑾 , : 流变阻尼器与磁悬浮系统并联隔振研究 等 磁
21 3
推 力盘
圭 土
固支
鞋
/摊
妻 l t
基于磁流变阻尼器的车辆悬架半主动控制研究_间接自适应控制与实验
基于磁流变阻尼器的车辆悬架半主动控制研究——间接自适应控制与实验Ξ郭大蕾 胡海岩(南京航空航天大学振动工程研究所 南京,210016)摘 要 在分析磁流变阻尼器车辆悬架非线性特性的基础上,设计了一类神经网络间接自适应控制器,并根据系统的低频特性和作动器的快响应,实现了悬架振动的神经网络实时控制。
计算机仿真和悬架实验的结果均表明,神经模拟器能够逼近非线性系统,神经控制器能在时域和频域内以较高的精度控制悬架系统的振动。
关键词:自适应控制;神经网络;磁流变阻尼器;车辆底盘;振动控制中图分类号:T P273;U463.33;O322引 言车辆悬架是一个复杂的多自由度振动系统,行驶过程中路面的激扰、车身承受的载荷以及轮胎的状况等都是变化的,此外,半主动悬架的减振机构常常表现为非线性特性,因而悬架系统是典型的时变、非线性系统。
对于这一难以建立精确数学模型的复杂系统,其逆模型也未知,因而无法根据期望的运动指标来估计或计算控制输入。
文献[1]提出神经网络直接自适应控制,但是直接自适应控制中神经控制器的反传误差比较粗略,不能很好地跟踪系统的误差。
为了提高神经控制器反传误差接近系统输入误差的真实程度,本文设计了一类神经网络间接自适应控制器。
神经模拟器除用来模拟真实系统外,还用以逼近控制器的反传误差,来增强控制精度和控制效果。
悬架的低频响应特性和磁流变液体毫秒级的快响应,使神经网络的实现成为可能,本研究最后对悬架装置进行了振动控制实验。
1 神经网络间接自适应控制已经知道,非线性控制对象的模型未知或相当复杂,无法根据系统的理想响应y d求得相应的合适输入u d,因此不可能求得神经控制器的反传误差u d -u。
直接自适应控制方法将系统理想响应与辨识器输出之间的误差y d-y p直接作为控制器反传误差来训练控制器。
因此,这只是对u d-u的一种粗略近似。
本文提出控制器反传误差的一种精确近似,即训练辨识器时,除将实际系统输出与辨识模型输出之差反向传播调节神经辨识器的权值外,还将理想响应与系统实际输出之差通过该辨识器模型进行误差的反向传播,从而由输出误差获得输入误差的更精确近似。
磁流变阻尼器的动力学模型及其在车辆悬架中的应用研究
磁流变阻尼器的动力学模型及其在车辆悬架中的应用研究一、本文概述随着现代科技的不断进步和汽车工业的飞速发展,车辆悬架系统作为影响车辆行驶平稳性和安全性的关键部分,其性能优化越来越受到人们的关注。
其中,磁流变阻尼器作为一种新型智能材料阻尼器件,以其独特的性能调控能力和快速响应特性,在车辆悬架系统中展现出广阔的应用前景。
本文旨在深入研究磁流变阻尼器的动力学模型,探索其在车辆悬架系统中的应用效果,为提升车辆行驶性能提供理论支持和技术指导。
本文将系统介绍磁流变阻尼器的基本原理和特性,包括其工作机理、力学特性和调控方式等。
在此基础上,建立磁流变阻尼器的动力学模型,通过理论分析和数值仿真,探讨其动力学特性及影响因素。
本文将研究磁流变阻尼器在车辆悬架系统中的应用,分析其对车辆振动特性和行驶稳定性的影响。
通过构建车辆悬架系统模型,结合仿真实验和实车测试,评估磁流变阻尼器在改善车辆行驶性能方面的实际效果。
本文还将对磁流变阻尼器在车辆悬架应用中的关键技术问题进行探讨,提出相应的解决方案和优化策略,为其在实际工程中的应用提供参考。
通过本文的研究,旨在推动磁流变阻尼器在车辆悬架系统中的应用发展,为提升车辆行驶性能、增强驾驶舒适性和安全性提供有力支持。
也为相关领域的研究人员和技术人员提供有益的参考和借鉴。
二、磁流变阻尼器概述磁流变阻尼器(Magnetorheological Dampers,简称MRDs)是一种基于磁流变液(Magnetorheological Fluid,简称MRF)的智能材料制成的被动或半主动控制元件,因其具有优良的阻尼特性和响应速度快等特性,近年来在车辆悬架系统、建筑振动控制以及军事领域等得到了广泛的应用。
磁流变液是一种由微米级铁磁颗粒和非导磁性载液混合而成的悬浮液,其粘度在磁场的作用下可以迅速并可逆地改变。
磁流变阻尼器正是利用了这一独特的物理特性,通过调整磁场强度,实现对阻尼力的连续、快速和可逆的控制。
磁流变阻尼器 (2)

磁流变阻尼器简介磁流变阻尼器(Magneto-Rheological Damper,简称MR阻尼器)是一种利用电磁效应来调节阻尼力的装置。
它由磁流变液、激磁线圈、控制系统等组成。
MR阻尼器在汽车、建筑物、桥梁等工程领域中广泛应用,可以实现对结构物或装置的精确控制和调节。
原理MR阻尼器的工作原理基于磁流变液的特殊性质。
磁流变液是一种具有磁致变色性的特殊材料,在无磁场作用下呈流动性,而在磁场作用下则呈现出高阻尼特性。
利用这一特性,MR阻尼器可以通过控制磁场的强弱来调节阻尼力。
在MR阻尼器中,激磁线圈产生磁场,使得磁流变液发生磁致变色。
当有外力作用于结构物或装置时,磁流变液的微粒间会发生相互碰撞和摩擦,产生阻尼力,从而减缓结构物或装置的振动或运动。
通过调节激磁线圈的电流,可以控制磁场的强度,进而达到调节阻尼力的目的。
优势快速响应由于磁流变液具有快速响应的特性,MR阻尼器的响应速度非常快。
它可以在毫秒级别内调节阻尼力,以适应不同的振动频率和振幅变化。
调节范围广MR阻尼器的阻尼力可以进行广泛的调节,可以实现从低阻尼到高阻尼的连续变化。
这使得它在不同应用场景下都有良好的适应性。
精确控制通过电流的控制,可以精确地操控MR阻尼器的阻尼力。
这种精确控制性能使得MR阻尼器在需要精确控制和调节的场景中具有优势。
高可靠性MR阻尼器由于不使用机械可动部件,因此没有摩擦、磨损问题,具有较高的可靠性和耐久性。
同时,它的结构简单,易于维护。
应用领域汽车工业在汽车悬挂系统中,MR阻尼器可以调节车辆的悬挂刚度和减震效果,提升行驶的舒适性和稳定性。
它可以根据路况的变化来实时调节悬挂系统,提供更好的悬挂效果。
建筑工程在高层建筑或桥梁结构中,MR阻尼器可以减少结构物的振动幅度,提高结构的抗风、抗地震能力。
它可以根据外部风力或地震波的变化来调节阻尼力,实现对结构物的精确控制。
航空航天在航空航天领域,MR阻尼器可以用于飞机的减振系统,减少机身的振动,提高乘客的舒适感。
《基于磁流变阻尼器的半主动座椅悬架减振策略研究》

《基于磁流变阻尼器的半主动座椅悬架减振策略研究》一、引言随着现代工业技术的飞速发展,人们对乘坐舒适度的要求越来越高。
座椅悬架系统作为影响乘坐舒适度的重要因素,其减振性能的优化显得尤为重要。
近年来,磁流变阻尼器因其独特的非线性阻尼特性,在半主动座椅悬架系统中得到了广泛的应用。
本文将重点研究基于磁流变阻尼器的半主动座椅悬架的减振策略,以实现更好的乘坐舒适度。
二、磁流变阻尼器原理及特性磁流变阻尼器是一种智能阻尼装置,其工作原理是利用磁场改变磁流变材料的流变特性,从而实现阻尼力的连续可调。
磁流变阻尼器具有非线性、可调性等优点,为半主动座椅悬架系统的减振策略提供了可能性。
三、半主动座椅悬架系统结构与工作原理半主动座椅悬架系统主要由座椅、弹簧、阻尼器等部分组成。
其中,磁流变阻尼器作为关键部件,通过调节阻尼力来实现对座椅振动的控制。
系统的工作原理是在振动过程中,根据实时检测到的振动信息,通过控制算法调整磁流变阻尼器的阻尼力,从而达到减振的目的。
四、减振策略研究4.1 减振策略的制定为了实现半主动座椅悬架系统的最优减振效果,需要制定合理的减振策略。
本文提出了一种基于天棚阻尼的磁流变阻尼器控制策略。
该策略通过实时检测座椅的振动信息,利用天棚阻尼算法计算出期望的阻尼力,然后通过控制系统调整磁流变阻尼器的阻尼力,以达到减小振动的效果。
4.2 仿真分析为了验证减振策略的有效性,本文进行了仿真分析。
通过建立半主动座椅悬架系统的仿真模型,模拟不同工况下的振动情况,对比分析采用不同减振策略时的减振效果。
仿真结果表明,基于天棚阻尼的磁流变阻尼器控制策略能够显著提高座椅的乘坐舒适度。
五、实验验证为了进一步验证减振策略的实际效果,本文进行了实验验证。
通过在实际的半主动座椅悬架系统中应用减振策略,观察并记录在不同工况下的振动情况及乘坐舒适度评价。
实验结果表明,采用基于天棚阻尼的磁流变阻尼器控制策略的半主动座椅悬架系统,能够有效减小振动,提高乘坐舒适度。
基于磁流变减震器的车辆悬架系统分析与优化
基于磁流变减震器的车辆悬架系统分析与优化近年来,随着技术的不断发展和进步,汽车工业也在不断涌现出新的技术和产品。
作为汽车悬架系统的关键部件之一,磁流变减震器逐渐成为汽车悬架技术领域的一个热门话题。
本文将从磁流变减震器与车辆悬架系统的基本原理入手,论述基于磁流变减震器的车辆悬架系统的分析与优化。
一、磁流变减震器的基本原理磁流变减震器是一种利用磁流变效应来实现减震功能的装置。
它利用磁性流体在磁场作用下可改变黏度的特性,通过控制磁流变减震器内的磁场强度,来控制磁流体的黏度,从而调节减震器的阻尼特性。
具体来说,磁流变减震器内部由磁流体和控制装置组成。
当磁流体受到磁场作用时,其分子间的相互作用力发生改变,从而使其黏度发生变化。
磁流变减震器的控制装置可以通过控制磁场强度来控制磁流变减震器内磁流体的黏度,从而达到调节减震器阻尼的目的。
二、基于磁流变减震器的车辆悬架系统基于磁流变减震器的车辆悬架系统是一种利用磁流变减震器来调节汽车悬架系统阻尼特性的系统。
其主要由磁流变减震器、传感器、控制器等组成。
在这种悬架系统中,传感器可以实时检测车辆在行驶中受到的各种外界因素的影响,如颠簸、起伏、路面不平等等。
控制器接收传感器传输的信息,进行处理后,通过控制磁流变减震器内的磁场强度来调节减震器的阻尼特性,以此来实现车辆行驶中的稳定性、舒适性、安全性等的提升。
三、分析与优化基于磁流变减震器的车辆悬架系统的分析与优化主要包括以下几个方面:1. 磁流变减震器的选择:不同的磁流变减震器具有不同的性能特点和适用范围,选择适合车型和行驶路况的磁流变减震器至关重要。
2. 控制算法的设计:通过优化控制算法,可实现更加精准的控制和更加优化的行驶性能。
3. 系统参数的优化:包括磁场强度、磁极间距等参数的优化,可进一步提升系统控制性能和行驶性能。
4. 悬架系统设计的优化:通过对悬架系统设计的优化,如改变减震器安装位置、调整弹簧刚度等,可为基于磁流变减震器的车辆悬架系统的优化提供更好的基础。
汽车悬架的磁流变减振器阻尼力调节特性的研究_喻晶

列, 即设 G= 014P a# s; l = 0108m; A p = 010095m2; D =
0 1203m; h = 01015m; N = 60; ( R2 - R1 ) = 01002m;
v0 ( t ) = v1 ( t ); K = 010691; B= 1128; I = 0时, 被动悬架 上常用减振器的阻尼力 Fc ( t)、磁流变减振器的阻尼 力 F r ( t)与时间 t 的关系如图 1所示。
2 被动悬架的磁流变减振器阻尼力调节特性
由汽车系统动力学原理可知, 1 / 4单轮车辆模型 中的被动悬架阻尼力 Fc 可表示为 [ 5] :
Fc = ce (#x sf - #xuf ) = ce v1 …………………… ( 4) 式中: ce 为被动悬架中常用减振器的阻尼系数; x# sf 为车 身振动速度; #xuf为轮胎振动速度; v1 为悬架振动速度。
图 1 Fc ( t)、Fr ( t)与 t的关系曲线
图 3 Fr ( t)、xg ( t) 与 t关系的比较图
75
现代制造工程 2009年第 2期
制造工艺 /工艺装备
从图 3可知, F r ( t)可以很好地跟踪道路情况, 起 到衰减悬架振动的效果。
根据汽车悬架系统最优控制理论, 当 F r ( t )等于 半主动悬架的最优控制力 F t ( t )时, 汽车的平顺性指 标为最优, F t ( t )可根据线性随机最优控制理论求出, 即 [ 5] :
当采用高斯白噪声作为路面输入模型时, 即 [ 5] :
#xg ( t) = - 2Pf 0xg ( t) + 2P G0 U0w ( t) …… ( 5) 式中: xg 为路面位移; t为作用时间; G0 为路面不平度 系数, 一般取 G 0 = 510 @ 10- 6; U0 为车速; w ( t )为均值 为零的 高 斯 白 噪 声; f 0 为下 截 止 频 率, 一 般 取 f 0 = 011H z。
磁流变材料阻尼器的结构设计与性能研究
磁流变材料阻尼器的结构设计与性能研究磁流变材料阻尼器是一种先进的阻尼器,在波浪荡漾、地震或机械振动等方面有广泛的应用。
它能够通过施加磁场来改变其内部阻尼阻力,以达到减振和减震的效果。
在本文中,我们将探讨磁流变材料阻尼器的设计和性能研究。
一、磁流变材料阻尼器的工作原理磁流变材料阻尼器的工作原理基于其材料本身的特性。
其外观类似于一个圆柱形的管子,内部则填充有磁流变材料。
当施加磁场时,磁流变材料会发生磁致变形,从而改变管子内部的液体位置和流动。
在运动过程中,液体会产生阻力,从而达到减震和减振的作用。
二、磁流变材料阻尼器的性能研究磁流变材料阻尼器的性能研究涉及到其结构设计和使用效果。
以下是该阻尼器的性能分析:1、阻尼器的结构设计阻尼器的结构设计对其性能具有重要影响。
通常,设计者会考虑以下主要因素:外部形状、内部填充材料和磁场生成器。
以外部形状为例,可以设计成不同形状,如梯形、V形或菱形。
这些形状对于磁流变材料的分布和内部阻尼效果具有明显的影响。
此外,内部填充材料的选择也至关重要,不同的材料具有不同的粘度和导电性能,因此对阻尼器的实际性能会产生重要的影响。
2、使用效果的测试除了设计结构以外,测试阻尼器的使用效果同样至关重要。
例如,可以通过实验来测量阻尼器在减震和减振方面的效果以及其对于振动频率和波形的响应。
此外,还可以对阻尼器的耐久性进行测试,以确保其能够在长时间内稳定工作。
三、磁流变材料阻尼器的应用磁流变材料阻尼器广泛应用于工业和车辆领域,如摩托车减震器、建筑物和桥梁结构减震器、汽车悬挂器等等。
在汽车领域,磁流变材料阻尼器已经被广泛应用于各大汽车制造商的高端品牌车型。
例如,美国福特公司的F-150皮卡车已经采用了该技术。
磁流变材料阻尼器可以大幅度提高车辆的行驶舒适性和安全性,从而更好地吸引消费者。
四、结论磁流变材料阻尼器是一项重要的技术,其在各大领域的应用也正在不断增加。
设计良好的阻尼器不仅可以提高机器和设备的性能,还可以减少因振动产生的损坏和磨损。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
和未来挑战[J].控制理论与应用,2004,21(1): 139—144. [2]李猛,唐伟.基于磁流变液减振器的车辆悬挂半主动 控制[J].测控技术.2004,23(2):4l—43. [3]Mamour A.Active/semi·active suspension control using mago netorheological actuators[J].International Journal of Systems Science,2006(1):35----44. [4]贾启芬,许恒波,王影,等.基于磁流变阻尼器的汽车悬 架半主动控制[J].天津大学学报.2006,39(7): 768--772.
F,(t):f半+£订D1r,(t)s魄[秽(£)](2)
2)不可控阻尼力
…=(警+竿)m) (3)
F,(t)主要与随控制电流,(t)变化的磁流变液剪 切屈服力丁,相关,一般来说可控;F。(t)主要与活塞的 相对速度秽相关,取决于悬挂系统的状态向量。磁流变 减振器总的阻尼力可写为:
F(t)=■(f)+F。(t)=一(t)+aVX (4) 其中X∈R28为系统状态列向量,VERH孤为阻尼器活 塞相对速度t,(t)在状态向量X中的位置转换向量,系 数n是关于设计参数的函数:
万方数据
图1 剪切阀式磁流变减振器示意图
式(1)中A。为活塞的有效面积,t,(t)为活塞的相 对速度,D为缸体内径,L为活塞的长度,h为活塞与缸 体间隙,|r,为磁流变液的剪切屈服力,叼为磁流变液的 表观粘度。对上述参数化磁流变阻尼器模型作进一步 研究,可以将总的阻尼力F(t)分为两部分:
1)可控阻尼力
在半主动控制技术中,控制力向量U中的每一个
控制力“;(i=1,…,m)由磁流变减振器阻尼力F提供,
即有F=毗。引入设计参数的函数:K(A。,h,L,D)=
2币南I[毋一a(Ap,h,L,D)V]x‘ 气 等,旦A +L,rrD,考虑到方程(2)、(4)和(7),不难得到:
I丁,(t)I
(8)
文献[5]给出了不同磁流变阻尼器中磁流变液的
1参数化的磁流变阻尼器力学模型
本文采用基于Bingham磁流变液的参数化阻尼力 模型,此模型显示了磁流变液随磁场而变化的力学特 性。对于图1所示剪切阀式磁流变阻尼器…。其总的 阻尼力F可以表示为‘91:
m,=(警+警∽+
f半+LqrD)r,,(£)sing["(t)] (1)
基金项目:国家自然科学基金资助项目(10672041) 收稿日期:2007—12—27 第一作者任艳飞男,硕士生,1981年3月生
取磁流变阻尼器结构参数为H 0I:A。=271 cm2,己=
8.4 cm,h=2 mm,卵=1.3 Pas,D=0.1m。计算上述五
个参数对整车系统第一阶固有频率的无量纲化灵敏度 如表1所示,不难看出,活塞与刚体间隙h对系统第一
阶固有频率的影响最为显著;系统第一阶固有频率及 其灵敏度随各个参数百分比变化的对应关系如图3和 图4所示。
间的变化关系,分析了阻尼器结构参数(如通道间隙、长度等)的变化对整个悬挂系统减振效果产生的影响,从而考查磁
流变阻尼器的疲劳磨损与汽车悬挂减振效果的关联程度。
关键词:汽车半主动悬挂系统;磁流变;结构参数;减振效果
中图分类号:032
文献标识码:A
在车辆工程的发展进程中,随着人们对舒适性和 安全性等要求的提高及现代科学技术的发展,经过科 学研究及实践而依次出现了三类悬挂系统:被动悬挂、 主动悬挂、半主动悬挂¨J。半主动悬挂系统采用了自 主调节的主动控制智能装置,而且这种主动控制并不 需要很大的能量∞3;同时半主动控制悬架系统在没有 主动控制时具有被动悬架系统的功能,在控制失效的 情况下保证了悬架系统的可靠性。所以半主动悬架具 有系统结构相对简单,具有出力大、能耗小、响应快、阻 尼力可调和易于控制等优点∞,4 J,在工程和实际应用中 有着广阔的前景。磁流变阻尼器是一种通过调整磁场 强度来达到调节阻尼目的的智能装置,因此,基于磁流 变液流变效应的磁流变阻尼器正符合了半悬架系统的 要求。目前国外对汽车磁流变阻尼器已进行了很多的 研究工作".5 J,而我国在磁流变阻尼器的应用属于初步 阶段№.7J,对磁流变参数变化对减振效果的影响研究涉 及较少。本文采用基于Bingham磁流变液的参数化阻 尼力模型,得出了半主动悬挂控制电流与系统的状态 向量及其反馈矩阵之间的关系式,分析了阻尼器结构 参数(如通道间隙、长度等)的变化对整个悬挂系统减 振效果产生的影响,从而为磁流变阻尼器在悬挂系统 中的广泛应用提供了理论基础。
剪切屈服力"ry(£)与输入电流,(£)之间的关系式:
r,(t)=kl—k2e“3“”≥0
(9)
式(9)中k。,k:和k,为拟合系数。由式(8)不难解得:
上式中行向量T=i瓦l南([t毋一)a_(A-p,剁h,L1号3 产)
(10) ,D)
KI A。,尼,L,
J—’
‘
V]。由此即得半主动悬挂控制电流随系统的状态向量
[6]程翔云,王蕾.连续悬索桥受横桥向船撞力的分析[J]. 公路.2002,3:57—60.
[7]刘建成,顾永宁,基于整船整桥模型的船桥碰撞数值仿真 [J].工程力学.2003,20(5):155一162.
[8]Jensen J.Ship·induced derailment on a railway bridge[J]. Structural Engineering International,1996,6(2):107—112.
(下转第86页)
86
振动与冲击
2008年第27卷
3.3与不考虑主梁斜拉索模型结果比较
为了考察斜拉索与
主梁对船桥碰撞结果的
影响,建立如图12所示
的船桥碰撞模型。以承
台的动态响应为例(图
13),与整桥模型相比
承台动态响应明显增加
很多。因此在进行船桥
碰撞分析时,应考虑主 梁及斜拉索对碰撞响应 的影响。
图12不考虑主梁与斜拉索 的船桥碰撞模型
万方数据
02
4
6
8
lO
12 14
16
18 20
%
(一活塞与缸体间隙,0活塞的长度,+活塞的有效面积, 口磁流变流的表观粘度,☆缸体内径)
图5 质心加权加速度均方根值随参数变化关系
78
振动与冲击
2008年第27卷
当磁流变阻尼器结构参数A。、L、D、矗和叼变化时, 车辆在随机路面激励下质心加速度均方根值‘111的变化 情况如图5所示,从中不难发现,活塞与缸体间隙h和活 塞的有效面积A。对系统的影响最大。在实际应用中,随
X、阻尼器的结构参数Ap,h等的变化关系。
2磁流变阻尼器结构参数变化对系统减振效 果的影响分析
图2所示为一整车模型,车身简化为一刚体,具有 上下垂直位移乃,左右倾斜角度0和前后俯仰角度咖 三个自由度,四个轮子分别简化为只包含一个质量位
移z。i和轮下弹簧k。,由此得到状态向量:x=[%,三。,0, 台,咖,¥,z。l,三。1,Zus2,zm2,彳∞,三。3,:甜,主I||4]TO采用文 献[10]中所选小型客车半主动悬架系统的参数:
第27卷第9期
振动与冲击 JOURNAL OF VIBRATION AND SHOCK
磁流变阻尼器结构参数对汽车悬挂系统减振效果的影响与分析
任艳飞,陈力奋
(复旦大学力学与工程科学系,上海200433)
摘 要:采用Bingham磁流变模型,得出了半主动悬挂控制电流与系统的状态向量、阻尼器的结构参数等因素之
“h^D)-警+警(5)
已知系统的状态方程为:
宕=AX+BU+日W
(6)
其中U∈R“为控制力向量;W为外界激励向量。
采用LQR优化算法可以得到优化控制力向量£, 与状态向量X的关系:
第9期
任艳飞等:磁流变阻尼器结构参数对汽车悬挂系统减振效果的影响与分析
77
U=GX
(7)
其中G=一R一187P={g。 92 …g。)’∈R”。28为状 态反馈增益矩阵,P由Riccati方程求得。
2)在进行船桥碰撞数值模拟计算时,如不考虑主 梁斜拉索的影响,桥梁的动态响应结果将偏大,因此计 算时,应采用整桥的船桥碰撞模型。
3)采用基于接触均衡的并行计算方法,能提高并 行计算效率,节省计算时间。
参考文献 [1]刘建成,顾永宁.船-桥碰撞力学问题研究现状及非线性
有限元仿真[J].船舶工程,2002,5:4—9. [2]Proske D,Curbach M.Risk to historical bridges due to ship
着阻尼器的磨损,参数h和活塞的有效面积A,的变化也 最明显,所以下面主要分析了参数h和A。的变化对系统 减振效果的影响。图6,7,8给出了随机激励下参数h和 A。变化5%时系统响应、功率谱和传递率的对比情况。
CG俯仰角加速度
巳毒、越螋景
t/s cG侧偏角加速度
t|s
轮心垂直加速度
一‰/p罡一划瑙最娅
厂、 八:糕!ii拉棠横型
皇 g
楼 趔
U.0
0.5
1.U
1.5
2.0
2.5
t旭
隔13两种模型承台位移曲线对比 3.4并行结果分析
整船整桥模型碰撞仿真的难点之一是仿真计算时 间过长,解决这一难题最好的办法就是利用并行计算 技术来大大缩短计算时间。在并行计算时,考虑接触 均衡的并行计算方法。将进一步减少计算时间,提高并 行效率。设计两种并行计算方案:方案1为未考虑接 触均衡的并行计算;方案2为考虑了接触均衡的并行 计算。不同数目CPU下两种方案的并行计算结果对比 如表4所示。从表4中能够看出,基于接触均衡的并 行计算方法,能提高并行计算效率,节省计算时间。