A定位器调试步骤
智能定位器调试步骤
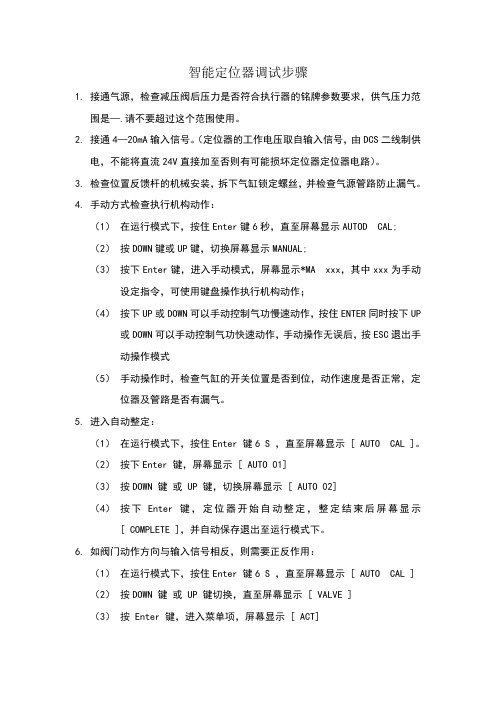
智能定位器调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求,供气压力范围是—.请不要超过这个范围使用。
2.接通4—20mA输入信号。
(定位器的工作电压取自输入信号,由DCS二线制供电,不能将直流24V直接加至否则有可能损坏定位器定位器电路)。
3.检查位置反馈杆的机械安装,拆下气缸锁定螺丝,并检查气源管路防止漏气。
4.手动方式检查执行机构动作:(1)在运行模式下,按住Enter键6秒,直至屏幕显示AUTOD CAL;(2)按DOWN键或UP键,切换屏幕显示MANUAL;(3)按下Enter键,进入手动模式,屏幕显示*MA xxx,其中xxx为手动设定指令,可使用键盘操作执行机构动作;(4)按下UP或DOWN可以手动控制气功慢速动作,按住ENTER同时按下UP 或DOWN可以手动控制气功快速动作,手动操作无误后,按ESC退出手动操作模式(5)手动操作时,检查气缸的开关位置是否到位,动作速度是否正常,定位器及管路是否有漏气。
5.进入自动整定:(1)在运行模式下,按住Enter 键6 S ,直至屏幕显示 [ AUTO CAL ]。
(2)按下Enter 键,屏幕显示 [ AUTO 01](3)按DOWN 键或 UP 键,切换屏幕显示 [ AUTO 02](4)按下Enter 键,定位器开始自动整定,整定结束后屏幕显示[ COMPLETE ],并自动保存退出至运行模式下。
6.如阀门动作方向与输入信号相反,则需要正反作用:(1)在运行模式下,按住Enter 键6 S ,直至屏幕显示 [ AUTO CAL ](2)按DOWN 键或 UP 键切换,直至屏幕显示 [ VALVE ](3)按 Enter 键,进入菜单项,屏幕显示 [ ACT](4)按Enter 键,屏幕显示 [*ACT ](5)按DOWN 键或 UP 键切换正反作用,并按 Enter 键确认保存,(屏幕显示为正作用 [+ACT RA ] 或反作用[+ACT DA ])7.如定位器屏幕显示与风门开度相反,则需要切换正反开度显示:(1)在运行模式下,按住Enter 键6 S ,直至屏幕显示 [ AUTO CAL ] (2)按DOWN 键或 UP 键切换,直至屏幕显示 [ VAEW ](3)按 Enter 键,进入菜单项,屏幕显示 [ YT 2500L ] 或 [ YT 2500R ](4)按DOWN 键或 UP 键切换,直至屏幕显示 [ VW ](5)按DOWN 键,屏幕显示 [* VW ](6)按DOWN 键或 UP 键切换正反方向开度显示,并按 Enter 键确认保存,(屏幕显示为正作用 [+ VW NOR ] 正方向显示或反方向显示[+ VWREV ])智能定位器程序功能图解1.功能模式:运行模式:即定位器远方操作模式,定位器接受远方操作信号来控制气功动作,并在屏幕上显示RUN。
定位器操作规程
定位器操作规程1. 引言定位器是一种常用于定位和导航目标位置的工具。
本文档旨在描述定位器的操作规程,帮助用户正确使用定位器,提高工作效率。
2. 术语定义•定位器:一种用于确定目标位置的工具。
•目标位置:用户期望定位器指示的位置。
•操作人员:使用定位器的个人或团体。
•定位误差:定位器测量结果与实际目标位置之间的差距。
3. 安全注意事项在操作定位器之前,请确保遵守以下安全注意事项:•熟悉并遵守定位器的操作手册和使用指南。
•使用合适的个人防护装备,如手套和护目镜。
•在使用定位器时保持注意力集中,避免分心或操作过程中的随意行为。
•遵守现场安全规定,确保周围环境安全。
4. 操作步骤步骤1:准备工作在开始操作定位器之前,进行以下准备工作:1.确保定位器电源正常并已充电。
2.检查定位器的各个部件是否完好无损。
3.将定位器放置在稳定的平面上,并确保其能够自由移动。
步骤2:选择目标位置通过以下步骤选择目标位置:1.使用定位器的显示屏或按钮选择目标位置模式。
2.根据实际需求输入或选择目标位置的相关信息,如坐标、距离或方向等。
步骤3:启动定位器按照以下步骤启动定位器:1.按下定位器的启动按钮或开关,使定位器开始工作。
2.确保定位器的各个部件运作正常,如传感器、指示灯等。
步骤4:定位目标位置通过以下步骤定位目标位置:1.按照定位器的指示,移动定位器并接近目标位置。
2.观察定位器的显示屏或指示灯,根据指示调整移动方向和速度。
3.靠近目标位置时,适当减速并小心调整位置,以消除定位误差。
4.当定位器指示目标位置时,确认位置准确性并停止移动。
步骤5:记录测量结果在定位目标位置后,进行以下记录工作:1.使用定位器的记录功能,将测量结果保存或导出。
2.在相关文件或系统中记录测量结果,并添加必要的标识或注释。
5. 故障排除在操作定位器过程中,可能会遇到一些故障或问题。
以下是常见故障的排除方法:1.如果定位器无法正常启动,请检查电池或电源连接是否良好,并尝试重新启动。
常见十二种定位器,调试步骤
常见十二种定位器,调试步骤阀门定位器是控制阀的主要附件,它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
本文重点讲解常见定位器调试步骤,帮助仪表人轻松掌握各类定位器。
一阀门定位器的原理、作用阀门定位器是控制阀的主要附件。
它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
因此,阀门定位器组成以阀杆位移为测量信号,以控制器输出为设定信号的反馈控制系统。
该控制系统的操纵变量是阀门定位器去执行机构的输出信号。
(1)用于对调节质量要求高的重要调节系统,以提高调节阀的定位精确及可靠性。
(2)用于阀门两端压差大(△p>1MPa)的场合。
通过提高气源压力增大执行机构的输出力,以克服液体对阀芯产生的不平衡力,减小行程误差。
(3)当被调介质为高温、高压、低温、有毒、易燃、易爆时,为了防止对外泄漏,往往将填料压得很紧,因此阀杆与填料间的摩擦力较大,此时用定位器可克服时滞。
(4)被调介质为粘性流体或含有固体悬浮物时,用定位器可以克服介质对阀杆移动的阻力。
(5)用于大口径(Dg>100mm)的调节阀,以增大执行机构的输出推力。
(6)当调节器与执行器距离在60m以上时,用定位器可克服控制信号的传递滞后,改善阀门的动作反应速度。
(7)用来改善调节阀的流量特性。
(8)一个调节器控制两个执行器实行分程控制时,可用两个定位器,分别接受低输入信号和高输入信号,则一个执行器低程动作,另一个高程动作,即构成了分程调节。
二阀门定位器的分类1、阀门定位器按输入信号分为气动阀门定位器、电-气阀门定位器和智能阀门定位器。
(1)气动阀门定位器的输入信号是标准气信号,例如,20~100kPa气信号,其输出信号也是标准的气信号。
A定位器调校步骤
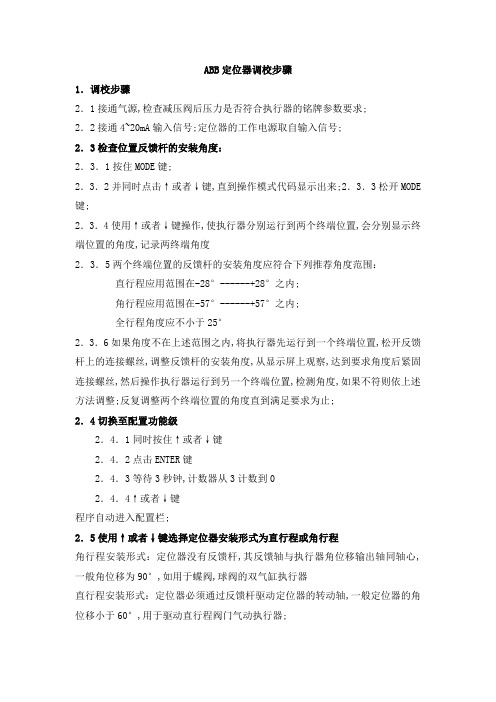
ABB定位器调校步骤1.调校步骤2.1接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求;2.2接通4~20mA输入信号;定位器的工作电源取自输入信号;2.3检查位置反馈杆的安装角度:2.3.1按住MODE键;2.3.2并同时点击↑或者↓键,直到操作模式代码显示出来;2.3.3松开MODE 键;2.3.4使用↑或者↓键操作,使执行器分别运行到两个终端位置,会分别显示终端位置的角度,记录两终端角度2.3.5两个终端位置的反馈杆的安装角度应符合下列推荐角度范围:直行程应用范围在-28°------+28°之内;角行程应用范围在-57°------+57°之内;全行程角度应不小于25°2.3.6如果角度不在上述范围之内,将执行器先运行到一个终端位置,松开反馈杆上的连接螺丝,调整反馈杆的安装角度,从显示屏上观察,达到要求角度后紧固连接螺丝,然后操作执行器运行到另一个终端位置,检测角度,如果不符则依上述方法调整;反复调整两个终端位置的角度直到满足要求为止;2.4切换至配置功能级2.4.1同时按住↑或者↓键2.4.2点击ENTER键2.4.3等待3秒钟,计数器从3计数到02.4.4↑或者↓键程序自动进入配置栏;2.5使用↑或者↓键选择定位器安装形式为直行程或角行程角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心,一般角位移为90°,如用于蝶阀,球阀的双气缸执行器直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的角位移小于60°,用于驱动直行程阀门气动执行器;我厂采用的ABB执行器为直行程安装形式,在参数里面选择:LINEARC直行程2.6启动自动调整程序:2.6.1按住MODE键;2.6.2并同时点击↑键一次或多次,直到显示出“P1.1”;2.6.3松开MODE键;2.6.4按住ENTER键3秒直到计数器倒计数到02.6.5松开ENTER键,自动调整程序开始运行;2.6.7 自动调整顺利结束后显示器显示“COMPLETE”,点击一下ENTER表示确认;在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因;也可以人为的强制中断自动调整程序2.7如有必要,进入“P1.2”调整控制偏差带死区2.8如有必要,进入“P1.3”测试设定效果;2.9存储设定结果:2.9.1按住MODE键;2.9.2并同时点击↑键一次或多次,直到显示出“P1.4”;2.9.3松开MODE键;2.9.4用↑或者↓键选择NV_SAVE若选择“CANCEL”,此前所做修改不予存储2.9.5按住ENTER键3秒直到计数器倒计数到0然后松开;前面所进行的设定和自动调整中所测得的参数将存储在EEPROM中,定位器转换到先前所选择的运行级操作模式;1.10运行级操作模式的选择模式:自适应控制模式1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“CTRL_ADP”;3.松开MODE键;4.显示器显示阀位百分数,如“50% POSITION”模式:固定控制模式1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“CTRL_FIX”;3.松开MODE键;4.显示器显示阀位百分数,如“50% POSITION”模式:在执行器的实际全行程范围内手动控制1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“MANUAL”;3.松开MODE键;4.使用↑或者↓键可从现场手动操作执行器;模式:用于检测位移范围是否合适1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“MAN_SENS”;一般情况下选择模式实现远程控制,只有在执行器实际行程非常小执行器速度太快,控制发生震荡时选择控制模式,但其控制精度较低;模式和模式均可以用↑或者↓键操作执行器,但模式专用于手操,而模式专用于检测定位器反馈杆实际运行范围是否超出传感器的最大检测范围,以便于校正反馈杆的连接,取得最佳控制效果;2.11系统调校:给定位器输入4~20mADC的控制信号,执行机构应从全关到全开位,位置变送器应送出4~20mADC信号,然后至少取5点包括零点和满量程进行校验,在失去气源压力、电源、控制信号时,执行机构应保持不动;。
常见十二种定位器调试步骤
常见十二种定位器调试步骤在软件开发过程中,定位器是一种重要的工具,用于跟踪和解决软件中的错误和异常。
下面是常见的十二种定位器以及调试步骤:1.编译器错误定位器:当编译器发现语法错误时,会输出错误信息,包括行号和具体错误信息,帮助开发人员快速定位并修复错误。
2.日志定位器:通过在代码中插入日志语句,记录程序在运行过程中的状态和变量值,可以帮助开发人员定位和分析问题。
3.断言定位器:断言是一种用于验证程序运行状态的机制。
通过在代码中插入断言语句,可以检查程序的假设是否成立,如果断言失败,就会触发异常,帮助开发人员快速发现问题。
4.异常处理定位器:在代码中使用异常处理机制可以捕获和处理程序中的异常情况,通过异常的栈追踪信息可以定位到异常发生的位置。
5.函数跟踪定位器:通过在代码中添加函数调用追踪,可以记录函数的调用关系,帮助开发人员定位问题所在。
6.内存调试定位器:在开发过程中,内存泄漏和内存溢出是常见的问题。
通过使用内存调试工具,可以分析程序的内存使用情况,并定位到内存泄漏和溢出的位置。
7.单步调试定位器:通过使用调试工具,在代码中设置断点,可以逐步执行程序并观察程序的状态和变量值,帮助开发人员定位问题。
8.检查点定位器:在关键代码位置插入检查点,用于验证程序的正确性。
如果程序执行到检查点时发生错误,可以确定问题所在。
9.运行时检查定位器:通过在代码中插入运行时检查语句,可以检查程序运行过程中的错误情况,帮助开发人员定位和解决问题。
10.性能分析定位器:在开发过程中,程序的性能可能成为一个问题。
通过使用性能分析工具,可以分析程序的性能瓶颈,并进行优化。
11.远程调试定位器:在分布式系统中,如果出现错误和异常,需要使用远程调试工具来定位和解决问题。
12.单元测试定位器:通过编写单元测试用例,可以验证程序的正确性。
如果单元测试失败,可以确定问题所在。
调试步骤如下:1.重现问题:首先,开发人员需要尝试重现问题,确定问题所在,并在相同的环境和条件下进行调试。
abb定位器调节方法
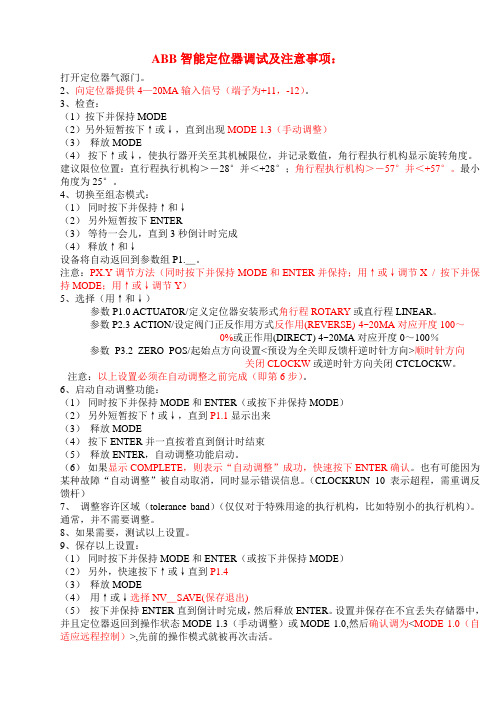
ABB智能定位器调试及注意事项:打开定位器气源门。
2、向定位器提供4—20MA输入信号(端子为+11,-12)。
3、检查:(1)按下并保持MODE(2)另外短暂按下↑或↓,直到出现MODE 1.3(手动调整)(3)释放MODE(4)按下↑或↓,使执行器开关至其机械限位,并记录数值,角行程执行机构显示旋转角度。
建议限位位置:直行程执行机构>-28°并<+28°;角行程执行机构>-57°并<+57°。
最小角度为25°。
4、切换至组态模式:(1)同时按下并保持↑和↓(2)另外短暂按下ENTER(3)等待一会儿,直到3秒倒计时完成(4)释放↑和↓设备将自动返回到参数组P1._。
注意:PX.Y调节方法(同时按下并保持MODE和ENTER并保持;用↑或↓调节X / 按下并保持MODE;用↑或↓调节Y)5、选择(用↑和↓)参数P1.0 ACTUATOR/定义定位器安装形式角行程ROTARY或直行程LINEAR。
参数P2.3 ACTION/设定阀门正反作用方式反作用(REVERSE) 4~20MA对应开度100~0%或正作用(DIRECT) 4~20MA对应开度0~100%参数P3.2 ZERO_POS/起始点方向设置<预设为全关即反馈杆逆时针方向>顺时针方向关闭CLOCKW或逆时针方向关闭CTCLOCKW。
注意:以上设置必须在自动调整之前完成(即第6步)。
6、启动自动调整功能:(1)同时按下并保持MODE和ENTER(或按下并保持MODE)(2)另外短暂按下↑或↓,直到P1.1显示出来(3)释放MODE(4)按下ENTER并一直按着直到倒计时结束(5)释放ENTER,自动调整功能启动。
(6)如果显示COMPLETE,则表示“自动调整”成功,快速按下ENTER确认。
也有可能因为某种故障“自动调整”被自动取消,同时显示错误信息。
(CLOCKRUN 10 表示超程,需重调反馈杆)7、调整容许区域(tolerance band)(仅仅对于特殊用途的执行机构,比如特别小的执行机构)。
定位器调校方法
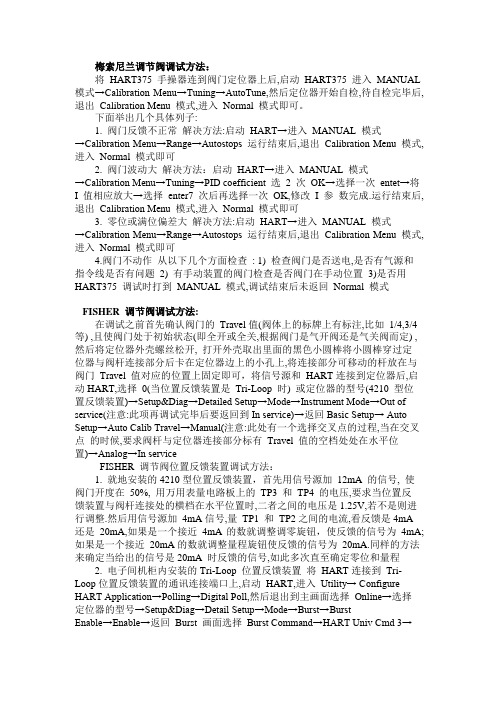
梅索尼兰调节阀调试方法:将HART375 手操器连到阀门定位器上后,启动HART375 进入MANUAL 模式→Calibration Menu→Tuning→AutoTune,然后定位器开始自检,待自检完毕后,退出Calibration Menu 模式,进入Normal 模式即可。
下面举出几个具体列子:1. 阀门反馈不正常解决方法:启动HART→进入MANUAL 模式→Calibration Menu→Range→Autostops 运行结束后,退出Calibration Menu 模式,进入Normal 模式即可2. 阀门波动大解决方法:启动HART→进入MANUAL 模式→Calibration Menu→Tuning→PID coefficient 选2 次OK→选择一次entet→将I 值相应放大→选择enter7 次后再选择一次OK,修改I 参数完成.运行结束后,退出Calibration Menu 模式,进入Normal 模式即可3. 零位或满位偏差大解决方法:启动HART→进入MANUAL 模式→Calibration Menu→Range→Autostops 运行结束后,退出Calibration Menu 模式,进入Normal 模式即可4.阀门不动作从以下几个方面检查: 1) 检查阀门是否送电,是否有气源和指令线是否有问题2) 有手动装置的阀门检查是否阀门在手动位置3)是否用HART375 调试时打到MANUAL 模式,调试结束后未返回Normal 模式FISHER 调节阀调试方法:在调试之前首先确认阀门的Travel值(阀体上的标牌上有标注,比如1/4,3/4 等) ,且使阀门处于初始状态(即全开或全关,根据阀门是气开阀还是气关阀而定) ,然后将定位器外壳螺丝松开, 打开外壳取出里面的黑色小圆棒将小圆棒穿过定位器与阀杆连接部分后卡在定位器边上的小孔上,将连接部分可移动的杆放在与阀门Travel 值对应的位置上固定即可,将信号源和HART连接到定位器后,启动HART,选择0(当位置反馈装置是Tri-Loop 时) 或定位器的型号(4210 型位置反馈装置)→Setup&Diag→Detailed Setup→Mode→Instrument Mode→Out of service(注意:此项再调试完毕后要返回到In service)→返回Basic Setup→ Auto Setup→Auto Calib Travel→Manual(注意:此处有一个选择交叉点的过程,当在交叉点的时候,要求阀杆与定位器连接部分标有Travel 值的空档处处在水平位置)→Analog→In serviceFISHER 调节阀位置反馈装置调试方法:1. 就地安装的4210型位置反馈装置,首先用信号源加12mA 的信号, 使阀门开度在50%, 用万用表量电路板上的TP3 和TP4 的电压,要求当位置反馈装置与阀杆连接处的横档在水平位置时,二者之间的电压是1.25V,若不是则进行调整.然后用信号源加4mA信号,量TP1 和TP2之间的电流,看反馈是4mA 还是20mA,如果是一个接近4mA的数就调整调零旋钮,使反馈的信号为4mA;如果是一个接近20mA的数就调整量程旋钮使反馈的信号为20mA.同样的方法来确定当给出的信号是20mA 时反馈的信号,如此多次直至确定零位和量程2. 电子间机柜内安装的Tri-Loop 位置反馈装置将HART连接到Tri-Loop位置反馈装置的通讯连接端口上,启动HART,进入Utility→ Configure HART Application→Polling→Digital Poll,然后退出到主画面选择Online→选择定位器的型号→Setup&Diag→Detail Setup→Mode→Burst→BurstEnable→Enable→返回Burst 画面选择Burst Command→HART Univ Cmd 3→返回到主画面后选择Online→"1"(指Trip-Loop)→Device Setup→BasicSetup→Configure Channels→Configure CH1→将Burst Variable 的类型改为"QV"Units 设为,"%"LRV 设为,"0",URV 设为"100",CH1 Enabled 设为"YES"然后保存即可.瑞基调门调试方法:瑞基调门调试是使用遥控器来调试的, 使用遥控器对中液晶显示屏按"┙"输入口令"000"进入一级设定菜单, 在一级设定菜单里主要是确定阀门的开关限位, 此时可手动将阀门打到全开(或全关)位置,然后使用遥控器按"↓"选择"打开限位"(或关闭限位) ,按"┙"进入,然后确定保存即可.之后退回主菜单,进入二级设定菜单,在二级菜单下主要是设定输入信号的量程,选择进入模拟信号量程项,选择20mA;然后将阀门打到就地控制状态用信号源加一个4mA 的信号,设定为低限阀位,加20mA 信号设为高限阀位保存即可! 此外可以使用遥控器来调整阀门的力矩,开关方向,保护方式等,具体情况根据显示屏显示选项操作即可西门子定位器调试方法:1.用定位器显示窗口下方的'+'和'-'两个按键, 使执行机构运动, 看整个机构能否自由走满行程.2.让执行器运动到行程的中间位置(直行程的反馈杆处于水平位置) ,就可以进行初始化了. 注:当你按住其中一个键的同时再按另一个键可以加快执行机构的动作.3.按功能键(小手形)5 秒后就可以进行参数设置.4.SIEMENS 定位器共有36 组参数, 可以根据现场的实际情况进行设置. 用'+'和'-' 键可以在一组参数中进行选择, 选择完后可以按一下功能键进入第二组参数的设置, 若上一个参数设置有误,可以按功能键同时按'-'键,回到上一个参数再进行设置.5.在这些参数中有几个是经常用到的. 1YFCT (执行器类型) :直行程选WAY,角行程选TURN. 2YAGL (额定反馈角度) :一般情况下,直行程设置成33,角行程90. 7SDIR: 给定方向上升RISE,给定方向下降FALL 38YDIR (操作变量方向显示) :上升RISE,下降FALL 同时改变SDIR 和YDIR 这两组参数可改变执行器动作方向. 55PRST 预设置(工厂设置) :当重新调试时,先进入55 项,长按+键 5 秒,直到显示ocay,说明已经恢复到工厂设置5.开始初始化时执行器必须处于行程的中间位置.6.参数设置完毕后用功能键切换到第四个参数,显示为'4.INIT',按住'+'键约5 秒定位器就自动进行初始化了.7.初始化一共分为5 步. 1)决定动作方向. 2)检查执行机构行程和零点. 3)确定执行机构上下动作时间. 4)确定最小的定位增量. 5)最佳的瞬时响应.8.当初始化完成时屏幕上显示"FINISH"按一下功能键显示"4.INIT".9.按功能键5 秒后,当屏幕显示有变化时松手,此时定位器处于手动模式,再按一下功能键定位器处于自动模式.10.初始化结束后定位器即进入正常工作状态.。
常见十二种定位器,调试步骤
常见十二种定位器,调试步骤阀门定位器是控制阀的主要附件,它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
本文重点讲解常见定位器调试步骤,帮助仪表人轻松掌握各类定位器。
一阀门定位器的原理、作用阀门定位器是控制阀的主要附件。
它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
因此,阀门定位器组成以阀杆位移为测量信号,以控制器输出为设定信号的反馈控制系统。
该控制系统的操纵变量是阀门定位器去执行机构的输出信号。
(1)用于对调节质量要求高的重要调节系统,以提高调节阀的定位精确及可靠性。
(2)用于阀门两端压差大(△p>1MPa)的场合。
通过提高气源压力增大执行机构的输出力,以克服液体对阀芯产生的不平衡力,减小行程误差。
(3)当被调介质为高温、高压、低温、有毒、易燃、易爆时,为了防止对外泄漏,往往将填料压得很紧,因此阀杆与填料间的摩擦力较大,此时用定位器可克服时滞。
(4)被调介质为粘性流体或含有固体悬浮物时,用定位器可以克服介质对阀杆移动的阻力。
(5)用于大口径(Dg>100mm)的调节阀,以增大执行机构的输出推力。
(6)当调节器与执行器距离在60m以上时,用定位器可克服控制信号的传递滞后,改善阀门的动作反应速度。
(7)用来改善调节阀的流量特性。
(8)一个调节器控制两个执行器实行分程控制时,可用两个定位器,分别接受低输入信号和高输入信号,则一个执行器低程动作,另一个高程动作,即构成了分程调节。
二阀门定位器的分类1、阀门定位器按输入信号分为气动阀门定位器、电-气阀门定位器和智能阀门定位器。
(1)气动阀门定位器的输入信号是标准气信号,例如,20~100kPa气信号,其输出信号也是标准的气信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A定位器调试步骤 Document serial number【LGGKGB-LGG98YT-LGGT8CB-LGUT-
ABB定位器调试步骤
1.定位器面板设置:
2.内部接线(4根)反馈和指令线。
3..调试前的重要参数切换方式:
切换就地、远方按住MODE键不要松开,再点击↑↓键可以进行切换。
用的方式进入(远方控制)(就地控制)
若要实现快开,则先按住↑键再按键↓键;实现快关,则先按住↓键再按住↑键,方可完成操作。
④用的方式进入,出现单词SENS-POS,其意思是显示调节定位器后连杆与后旋钮弧度保持在对称的范围内。
4、调试步骤
:将↑↓键同时按,然后点击”ENTER”键,出现单词“LINEAR”调节角行程和直行程。
:按住MODE键,点击↑↓键,进入菜单。
常按ENTER键3S,然后面板显示倒数计时为0后松开,就出现自整定,直到出现完成“COMPIETE”单词。
:退出(EXIT)会显示“保存”和“不保存”,按住“ENTER”3S,则保存调试,若不保存,直接按↑键,退出到“放弃”单词,然后再按住“ENTER”
3S,退出。
④出现REVERSE单词,显示的是调节阀门和定位器的正反作用。
⑤出现CW/CCW单词,调节的是DCS和就地定位器指令的正反作用。
⑥出现EXIT单词,意思为退出。
⑦出现DIGEET单词,则调节的是DCS和就地定位器反馈的正反作用。
以上参数为重要参数调试步骤,详情请查看说明书!。