吉尼高空作业车平台负载传感系统S-60 HC
【微计算机信息】_汽车电子_期刊发文热词逐年推荐_20140722

107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160
最小二乘法 智能化 智能交通系统 智能 无线通信 无数数据收发 数据挖掘 数据存储 数学模型 数字硬盘录像机 数字滤波器 操作系统 控制策略mc9s12dp256 接口 探测汽车 报警系统 报文采集 总线 微控制器 强光源 开关电源 嵌入式操作系统 小波变换 导航 实时系统 实时图像处理 安全距离模型 安全行驶状态 安全报警 复杂可编程逻辑器件(cpld) 处理器 基尼指数 在线监测 周期测量 启动/发电机 发动机 反馈电流 反激变换 双码流 双向控制 协议转换 半挂车 半主动悬架 区域控制 动态阻抗 功率设计 制动控制 决策树 全球定位系统 光敏传感器 停车备份 信息采集 信号模拟 交通信息系统
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106
高空作业车工作原理
高空作业车工作原理全文共四篇示例,供读者参考第一篇示例:高空作业车是一种专门用于高空作业的机械设备,它能够帮助工人在高空环境中进行各种作业,如修缮建筑物、清洁窗户、维修电线等。
通过高空作业车,工人可以安全、高效地完成工作,提高工作效率,减少工伤事故的发生。
高空作业车的工作原理主要是通过液压系统和电气控制系统来实现的。
液压系统主要包括液压泵、液压缸、液压管路和控制阀等部件,它们共同协作完成高空作业车的升降、伸缩和旋转等功能。
电气控制系统则是通过电气设备控制高空作业车的运行,实现各种功能的控制和操作。
高空作业车的升降功能是通过液压泵将液压油输送到液压缸中,液压缸在液压油的作用下推动高空作业车的臂部升起或下降。
液压泵通过控制阀控制液压油的流量和流向,从而实现高空作业车的升降功能。
高空作业车的伸缩功能是通过液压缸伸缩部件的伸缩来实现的,液压缸伸缩部件可以使高空作业车的臂部在水平方向上伸缩,从而实现跨越障碍物或达到远处目标的功能。
除了升降、伸缩和旋转功能外,高空作业车还具有安全保护装置,如限位开关、超载保护装置、防倾覆装置等,以保证高空作业车在高空作业过程中的安全性和稳定性。
高空作业车还配备了作业篮、操作台和遥控器等设备,方便工人进行高空作业。
高空作业车的工作原理是通过液压系统和电气控制系统协作完成高空作业车的升降、伸缩和旋转等功能,保障工人在高空作业环境中的安全和高效作业。
高空作业车的运用大大提高了工作效率,减少了工伤事故的发生,对现代工程施工和维护起到了重要的作用。
【字数:407】第二篇示例:高空作业车是一种用于在垂直或近似垂直方向上进行工作的特种设备。
其主要用途是用于在高空进行施工、维修、清洁等作业。
高空作业车可以帮助工人在不易到达的高处进行作业,提高工作效率和安全性。
本文将介绍高空作业车的工作原理及其关键部件。
高空作业车通常由底盘、折臂、升降机构、液压系统、电气系统等部分组成。
底盘是高空作业车的基础部件,通常由起重机底盘、搬运车底盘或其他特种车辆底盘改造而成。
S?-60 FE油电混合臂式高空作业平台

S?-60 FE油电混合臂式高空作业平台
佚名
【期刊名称】《起重运输机械》
【年(卷),期】2024()6
【摘要】为了满足高空作业设备环保节能需求的同时又能保持高性能、高效率的特性,吉尼最新推出的油电混合直臂型高空作业设备Genie?S?-60 FE(以下简称设备)实现了本地化生产制造,为不同的工地应用提供了多元化的技术解决方案。
设备平台载重300 kg,工作高度20.6 m,水平延伸12.3 m,设备宽度/长度为2.49
m/9.65 m.
【总页数】1页(P64-64)
【正文语种】中文
【中图分类】F42
【相关文献】
1.混合臂式高空作业车变幅系统动态建模与分析
2.强强联合占领高空作业行业制高点——捷尔杰1850SJ直臂式高空作业平台成功交付众能联合
3.混合臂式高空作业车变幅系统多目标优化
4.基于蒙特卡洛法的混合伸缩折臂式高空作业平台车工作空间计算研究
5.全新GenieZ-60/37FE曲臂型高空作业平台再征BAUMA展
因版权原因,仅展示原文概要,查看原文内容请购买。
直臂式高空作业车施工方案

直臂式高空作业车施工方案施工方案:直臂式高空作业车本方案依据以下规范要求编制:1.建筑施工安全检查标准(59-2011)2.建筑施工高处作业安全技术规范(80-91)3.龙门架及井架物料提升机安全技术规范(88-92)4.建筑施工扣件钢管脚手架安全技术规范(130-2001)5.建筑工程安全生产管理条例施工准备:1.清理设备上的泥土杂物,检查设备外观是否完好,有无变形、裂纹等异常损坏。
2.检查转向机构有无异常。
3.检查轮胎有无损坏,气压是否正常,螺栓有无松动和丢失。
4.检查制动系统有无异常。
5.检查车厢内和平台上是否有杂物,工作平台上不能有油污。
6.检查支腿、臂架、作业斗有无变形、裂纹,工作臂油缸是否正常,销轴是否完好。
7.检查照明、喇叭、倒车镜、灭火器等装置是否齐全有效。
8.地面应坚实平整,作业过程中地面不应下陷。
9.风速不超过12.5m/s。
高空作业车操作规程:为确保安全使用高空作业车及升降平台,结合相关规程和规定,特制定高空作业车及升降平台安全操作规程。
1.操作高空作业车及升降平台人员必须身体健康。
患有精神病、癫痫病及经医师鉴定患有高血压、心脏病等不宜操作高空作业车及升降平台。
凡发现工作人员有饮酒、精神不振时,禁止操作高空作业车及升降平台。
2.使用高空作业车及升降平台必须经过专门培训。
3.高空作业车及升降平台操作人员在执行各项检查和保养后方可启动高空作业车及升降平台,工作前应检查高空作业车及升降平台车的工作范围,清除妨碍高空作业车及升降平台车回转及行走的障碍物。
4.支撑是高空作业车及升降平台操作的一项重要准备工作,应选择平整的地面,如地基松软或起伏不平,必须用枕木垫实后,才可进行工作。
5.高空作业车及升降平台一般应先起下臂,再起中臂,最后再起上臂。
在升降平台回转操作过程中,必须在下臂的起升在一定高度后方可进行回转,回转应缓慢,同时注意前臂及平台对各设备的距离是否满足安全需要。
6.工作平台上的操作人员应佩戴安全带,在带电区域工作时,应将车体按规定进行接地。
自行式直臂型高空作业平台-吉尼

轮胎
• 水基粗糙地面泡沫充填轮胎(标准型)
不适用于三入口式平台 仅适用于工厂提供的零部件选项 (3) 包括最初二年的订购 (4) 仅供可选择型号,请与你所在地的吉尼分公司进一步咨 询详细信息 具体选装件请详洽您所在区域的吉尼销售
(2)
(1)
动力
• 所有发动机都符合排放标准 • 12伏直流辅助动力 • 发动机防再启动保护 • 自动发动机故障熄火 • 进气加热器(Deutz发动机)
B
D
D
C G F G
C
* 公制工作高度是平台高度加 2 米,英制是平台高度加 6 英尺 ** 爬坡能力适用于斜坡上行驶,有关斜坡等级参阅操作手册 *** 重量根据选项所在国的标准而不同
F
自行式直臂型高空作业平台
S -100 & S -105
™ ™
特征
标准特征 尺寸
S -100 • 106英尺(32.48米)工作高度 • 75英尺(22.86米)水平延伸 • 750磅(340公斤)承载能力 S™-105 • 111英尺(34.00米)工作高度 • 80英尺(24.38米)水平延伸 • 500磅(227公斤)承载能力
带您到达更高处
infoawpterexcoms?100s?105自行式直臂型高空作业平台平台选项?钢质8英尺244米标准型?钢质6英尺183米?8英尺244米三入口短臂选项?无短臂仅限s100?5英尺152米的短臂仅限s105动力选项?deutz柴油74马力55千瓦?perkins柴油74马力55千瓦驱动转向?四轮驱动标准型?四轮转向标准型车轴?可扩张车轴标准型轮胎?粗糙地面泡沫充填轮胎标准型?粗糙地面实心轮胎性能?半高网孔平台带旋转门?平台顶端辅助栏杆?arcpro275?重型焊机组件?空气管连接至平台?生物可降解液压油?豪华抗恶劣环境组件?高级航空器防碰撞组件限6英尺平台?拇指摇杆转向?工具托盘?面板支架套件仅限三入口式工作平台?操作员防护构件动力?交流电发电机组件110伏60赫兹220伏50赫兹3000瓦?冷启动组件?柴油尾气过滤器防火星消声器催化消声器?空气进气预过滤器选项和附件尺寸s?100?106英尺3248米工作高度?75英尺2286米水平延伸?750磅340公斤承载能力s?105?111英尺3400米工作高度?80英尺2438米水平延伸?500磅227公斤承载能力性能?自动调平平台?液压旋转平台?全比例霍耳效应手柄控制?液压油冷却器?行驶确认?ac电源线至平台?喇叭?计时器?倾斜警报?下降警报?警报组件?360连续的转盘旋转?可锁定的低轮廓转盘侧盖?正牵引驱动?双速行走马达?可设定限制高度至80英尺?地面控制箱盖?发动机状态显示?平台工作灯?可锁定的平台控制盒盖动力?12伏直流辅助动力?发动机防再启动保护?自动发动机故障熄火?为焊机预备的125千瓦交流发电机轻松配置以满足您的需要有关详细信息请与当地分销商或genie销售部联系
1升降平台车技术规格书
1升降平台车技术规格书1.产品简介集装箱/集装板升降平台车是一种全液压转向、前桥驱动,行车气制动,行驶无级变速的自驱动车辆,该平台车的最大装卸重量为6.8吨,最大升降高度为3.5米,可满足国内机场现有的所有机型底舱集装箱、集装板货物装卸。
2.产品标准2.1 IATA AHM910 《飞机地面支持设备基本要求》2.2 IATA AHM913 《飞机地面支持设备基本安全要求》2.3 ISO6968(1994) 《宽体飞机腹舱集装箱、集装板升降平台车-性能要求》2.4 IATA AHM931 《宽体飞机腹舱集装箱、集装板升降平台车-性能要求》2.5 Q/WGT020-2004 《WG系列集装箱、集装板升降平台车》3.工作条件3.1 海拔高度:≤2000m3.2 环境温度:-40°C~+65°C3.3 风速:≤22m/s注:严寒地区对发动机需提出低温启动配置要求,高海拔地区对发动机动力提出特殊要求4.技术规格4.1 最大提升量:≧6800kg4.2 主平台4.2.1 提升速度:≧14m/min4.2.2 传送速度:≧18m/min4.2.3 最小高度:≧480mm4.2.4 最大高度:≦3600mm4.2.5 挡板内宽:2480mm4.3 桥平台4.3.1 提升速度:≧4m/min4.3.2 传送速度:≧18m/min4.3.3 最小高度:≧1799mm4.3.4 最大高度:≦3550mm4.4 外形尺寸(长×宽×高):≦8620×3700×30404.5 行驶性能4.5.1 最高行驶速度:≦11km/h4.5.2 制动距离(最高时速时):≦4m4.5.3 最小转弯半径:≦8.5m4.5.4 最大转向角:30°4.6 整备重量:≧15000kg4.7 装载量:一次可同时装载集装板(3175×2438)一个,集装箱(LD-3)两个。
赞博尼612 IZO型号电动自动化驱动说明书

这款来自欧洲的匠心之作配有常规仅为选配的技术和功能,它能提供最大的能力和效率,能修整出世界一流的冰面。
612 IZO 型 号电 动
先进的自动化驱动
612IZO 型 号
电 动赞博尼和赞博尼®浇冰车 的配置是 Frank J. Zamboni & Co., Inc. 的注册商标。
赞博尼 2021结构特点金属驾驶舱主控板;镀锌底盘;不锈钢超大雪箱;坚固耐用的皮带驱动螺旋杆,减低驾驶室噪音;多层防锈,防腐喷漆处理。
标准配置和功能自动雪刹车;轮胎冲洗;水位显示器;倒车警示喇叭;冰面的水冲洗;雪箱照明;可调节的方向盘;冰面冲洗用水表;加热座椅。
电子控制技术伺服式AC 控制。
两个电驱动螺旋式电机,电控给水阀门;紧急停车功能。
电马达。
带有电池电量,水位和车速的显示屏。
电池和充电机的特点工业级铅酸或可选锂离子电池。
可以根据各个场地的不同情况和需求,设置计算机编程的充电器和给712浇冰机充电。
电池的加水比例要求是标准化的。
液压系统电控液压泵电机;根据机器的用水量来控制机器的行走速度。
对 雪箱,冰面平整器设置了安全阀门。
液压四轮驱动和刹车系统。
许每个操作员按照自己的理想位置放置刀片。
驾驶室仪表盘上用国际通用的显示符号,图标组合在一起 - 破折号参考机器系统和功能来表示机器的性能和功能。
液压动力板刷到达更高位置,是该机型一个标准配置。
手拉电动葫芦0.5T设计图纸
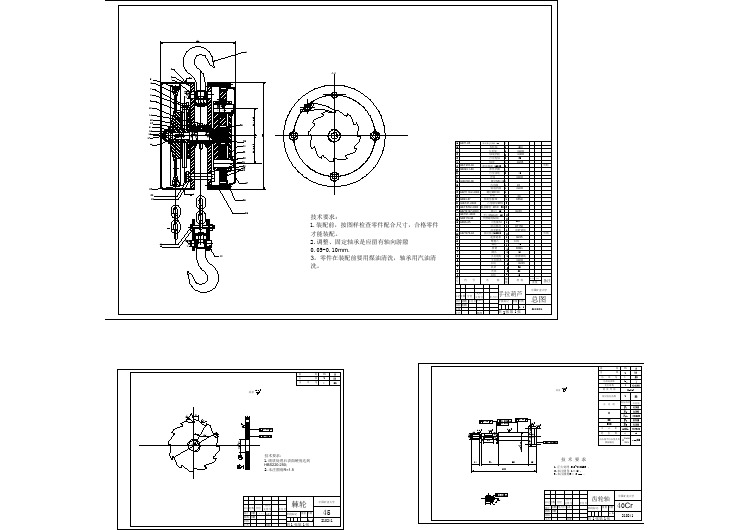
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高空作业车平台负载传感系统S-60 HC
如何校核平台负载传感系统
对于机器的安全操作,负载传感系统的校核是非常必要的,持续不断地使用一个不正
确校核了的负载传感系统,会导致平台过载传感的失效。
这会危及机器稳定性,导致机器倾翻。
注意:
对于S-60,S-65,S-60 TRAX和S-65 TRAX型号的机器,参考维修程序2-3。
执行这一程序必须臂杆完全缩回处于收藏位置,机器在坚硬水平的地面上。
平台过载系统不允许部分校核,必须全部校核。
1----在地面控制,把钥匙置于OFF位置,按下红色紧急停止按钮于OFF位置。
拉出平台控制红色紧急停止按钮于ON位置。
2----移走平台上所有的重物、工具和设备。
危险!
倾翻的危险。
不移走平台上的重物、附件、选项、工具或减轻它们的重量,会导致平台传感系统不能正确校核,这会允许平台载重量增加,会导致机器倾翻。
3----打开地面控制箱,在继电器附近找到校核扳钮开关。
注意:
如果行程控制器和/或安全控制器任何一个被更换,或软件被更新,恢复系统默认设定值,继续第4步。
见《如何恢复默认设定》。
否则,继续第4步进入校核模式。
4----置钥匙开关于地面控制,拉出红色紧急停止按钮于ON位置。
结果:蜂鸣器约响2秒。
5----蜂鸣器后2秒内拨动校核扳钮开关3次进入校核模式。
结果:蜂鸣器响1秒,表示第一步校核被接受。
行程控制器上的绿色的LED应该快速闪烁,红色的LED应该闪烁2次表示进入校核的第2步。
如果蜂鸣器未响,绿色的LED没有快速闪烁,则返回第1步重新校核。
注意:一旦进入校核模式开始校核,每一步校核有8分钟的时间限制,如果任何一步校核超过8分钟限制,校核超时,校核需要从第1步重新开始。
6----从地面控制启动发动机。
7----举升臂杆直到如图所示轴间距离到2760+/-19mm.。
危险!
压碎的危险。
当臂杆正在举升时,保持臂杆运动部件的清洁,在臂杆运动时,不要试图测量轴间距离。
8----在地面控制箱内拨动校核扳钮开关1次。
结果:蜂鸣器应该响1秒钟表示第2步校核步骤被接受。
操作控制器上的绿色LED快速闪烁,红色的LED应该闪烁4次,表示进入第3步校核。
9----举升臂杆至轴间距离4248+/-19mm。
危险!
压碎的危险。
当臂杆正在举升时,保持臂杆运动部件的清洁,在臂杆运动时,不要试图测量轴间距离。
10----拨动地面控制箱内校核扳钮开关1次。
11----完全举升伸出臂杆。
12----拨动地面控制箱内校核扳钮开关1次。
结果:蜂鸣器响1秒钟,表示第4步校核被接受。
行程控制器上的绿色LED快速闪烁,红色的LED应该闪烁5次,表示进入第5步。
13----完全缩回并降低臂杆至收藏位置。
14----在平台中心放一个340.2Kg的重物。
注意:如果你的机器装配了附件或选项,这些附件必须移走,或者这些重物的重量应该被减除,以精确校核平台负载传感系统。
15----拨动地面控制箱内校核扳钮开关1次。
结果:蜂鸣器响1秒钟,表示第5步校核被接受。
行程控制器上的绿色LED快速闪烁,红色的LED应该闪烁6次,表示进入第6步。
16----在平台中心再放一个231.3Kg的重物,使得其负载总重达到571.5Kg。
17----拨动地面控制箱内校核扳钮开关1次。
结果:蜂鸣器响1秒钟,表示第6步校核被接受。
发动机熄火,蜂鸣器响表示平台过载。
18----按下地面控制紧急停止开关到OFF位置,再打开红色紧急停止按钮到ON位置,使系统重新设置。
19----目测控制器内所有的LED显示。
结果:所有的LED熄灭,表示平台载荷传感系统已经校核完成。
20----在地面控制按下红色紧急停止按钮到OFF位置。
21----移走平台内的校核重物。
22----在地面控制拉出红色紧急停止按钮到ON位置,目测行程和安全控制器内所有的LED显示。
结果:所有的红色的绿色的LED熄灭,表示平台载荷传感系统已经校核完成。
注意:
如果两个控制器中的任一LED闪烁,则表示负荷传感系统未正确校核或有故障存在。
a 绿LED(行程控制模块)
b 红LED(行程控制模块)
c 行程控制模块
d 安全控制模块
e 红LED(安全控制模块)
f 绿LED(安全控制模块)
如何恢复系统默认设置
1.钥匙开关转到地面控制并拉出红色紧急停止按钮到ON位置。
结果:蜂鸣器发出一个长音。
2.拨动并保存校核扳钮开关5秒钟。
结果:蜂鸣器应该响1 秒钟。
3.按下红色红色紧急停止按钮到OFF位置。