基于粒子群算法优化双脉冲绕飞问题
基于粒子群算法的多次反射飞行时间质量分析器电压优化
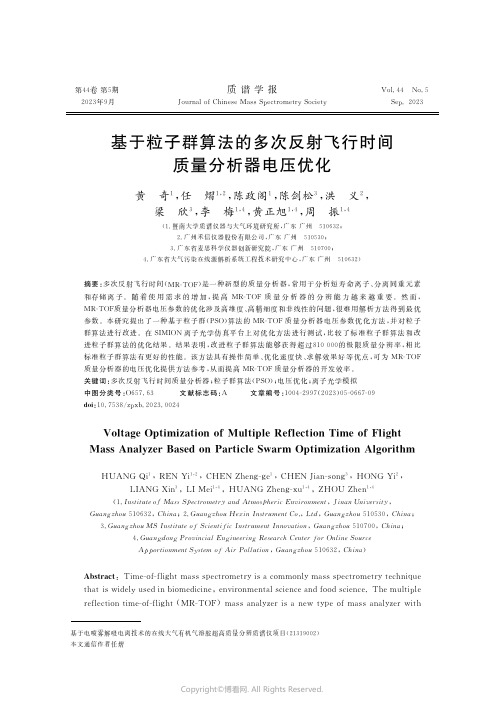
!第!!卷第"期质谱学报#$%&!!!'$&" !!()(*年+月,$-./0%$1234/5657066895:;.$<5;.=8$:45;=859&()(*基于粒子群算法的多次反射飞行时间质量分析器电压优化黄!奇> 任!熠> ( 陈政阁> 陈剑松* 洪!义(梁!欣* 李!梅> ! 黄正旭> ! 周!振> !!>&暨南大学质谱仪器与大气环境研究所"广东广州!">)M*(#(&广州禾信仪器股份有限公司"广东广州!">)"*)#*&广东省麦思科学仪器创新研究院"广东广州!">)?))#!&广东省大气污染在线源解析系统工程技术研究中心"广东广州!">)M*($摘要 多次反射飞行时间!7B D C I^$是一种新型的质量分析器"常用于分析短寿命离子%分离同重元素和存储离子&随着使用需求的增加"提高7B D C I^质量分析器的分辨能力越来越重要&然而"7B D C I^质量分析器电压参数的优化涉及高维度%高精细度和非线性的问题"很难用解析方法得到最优参数&本研究提出了一种基于粒子群!e8I$算法的7B D C I^质量分析器电压参数优化方法"并对粒子群算法进行改进&在8S7S I'离子光学仿真平台上对优化方法进行测试"比较了标准粒子群算法和改进粒子群算法的优化结果&结果表明"改进粒子群算法能够获得超过N>))))的极限质量分辨率"相比标准粒子群算法有更好的性能&该方法具有操作简单%优化速度快%求解效果好等优点"可为7B D C I^质量分析器的电压优化提供方法参考"从而提高7B D C I^质量分析器的开发效率&关键词 多次反射飞行时间质量分析器#粒子群算法!e8I$#电压优化#离子光学模拟中图分类号 I M"?&M*文献标志码 A文章编号 >))!D(++?!()(*$)"D)M M?D)+!"# >)&?"*N'P9Q R&()(*&))(!W"'/&90P7/#4#N&/#"%"*3K'/#7'020*'0./#"%:#40"*I'#9,/ 3&))$%&'(N0-M&)0!"%T&-/#.'0>@&-4P7/#4#N&/#"%$'9"-#/,4GT A'W F4>"B`'V4>"("2G`'Y35/X D X5>"2G`',40/D6$/X*"G I'W V4("E S A'W U4/*"E S754>"!"GT A'WY35/X D Q->"!"Y G I TY35/>"!!>"9!./*/(/,123%..5;,'/-1<,/-0%!4D/<1.;$,-*'O!+*-1!<,!/"=*!%!)!*+,-.*/0"K(%!&?$1(">)M*("#$*!%#("K(%!&?$1(H,J*!9!./-(<,!/#1""7/4"K(%!&?$1(">)"*)"#$*!%# *"K(%!&?$1(359!./*/(/,125'*,!/*2*'9!./-(<,!/9!!1+%/*1!"K(%!&?$1(">)?))"#$*!%# !"K(%!&41!&:-1+*!'*%>O!&*!,,-*!&A,.,%-'$#,!/,-21-@!>*!,51(-',D;;1-/*1!<,!/50./,<12D*-:1>>(/*1!"K(%!&?$1(">)M*("#$*!%$$;)/-&./*!C4<5D$1D1%4X3;<066695:;.$<5;.=460:$<<$/%=<066695:;.$<5;.=;5:3/4_-5 ;30;46[4Z5%=-65Z4/R4$<5Z4:4/5"5/\4.$/<5/;0%6:45/:50/Z1$$Z6:45/:5&C35<-%;49%5 .51%5:;4$/;4<5D$1D1%4X3;!7B D C I^$<0660/0%=P5.460/5[;=95$1<0660/0%=P5.[4;3基于电喷雾解吸电离技术的在线大气有机气溶胶超高质量分辨质谱仪项目!(>*>+))($本文通信作者任熠Copyright©博看网. All Rights Reserved.-%;.0D34X3<066.56$%-;4$/0/Z306R55/-65Z0;4/6;4;-;4$/6"6-:306G5%<3$%;P25/;.5 1$.G50\=S$/B5650.:3!W8S$"`-.$950/I.X0/4P0;4$/1$.'-:%50.B5650.:3!2`B'$ 0/ZG4X3`/5.X=A::5%5.0;$.B5650.:3I.X0/4P0;4$/!O`O$;$<506-.563$.;D%4\5Z4$/ <06656"6590.0;546$R0.0/Z6;$.54$/6&A6;35Z5<0/Z1$.-654/:.5064/X"4;46R5:$<4/X 4<9$.;0/;;$4<9.$\5;35.56$%\4/X9$[5.$17B D C I^<0660/0%=P5.6&G$[5\5.";35 $9;4<4P0;4$/$1;35\$%;0X590.0<5;5.6$17B D C I^<0660/0%=P5.646034X3D Z4<5/64$/D 0%"34X3%=.514/5Z0/Z/$/D%4/50.9.$R%5<"[34:346Z4114:-%;;$6$%\5$9;4<0%%=R=0/0%=;D 4:0%<5;3$Z&S/;3466;-Z="090.;4:%56[0.<$9;4<4P0;4$/!e8I$0%X$.4;3<D R065Z<5;3D $Z1$.$9;4<4P4/X;35\$%;0X590.0<5;5.6$17B D C I^<0660/0%=P5.6[069.$9$65Z&C35 <5;3$Z-65Z0/4<9.$\5Z90.;4:%56[0.<$9;4<4P0;4$/!S e8I$099.$0:3[4;304/5.;40 [54X3;Z5:0=6;.0;5X=&C35$9;4<4P0;4$/<5;3$Z[06;56;5Z$/;358S7S I'4$/$9;4:6 64<-%0;4$/9%0;1$.<&2$/64Z5.4/X>**26H4$/[4;3O K>c"]5#" `K N c"5#" J K 0K ><<" KK>c"<.0Z"0<066.56$%\4/X9$[5.$\5.N c>i>)"[060:345\5Z[35/ &/K)/60/Z0<066.56$%\4/X9$[5.$\5."c)i>)"[060:345\5Z[35/&/K()/6&S e8I $9;4<4P5Z;35R56;.56-%;6;$0:345\5;35(/Z$.Z5.1$:-6$1;4<5[4;3.5695:;;$5/5.X= 1$.;357B D C I^<0660/0%=P5."0/Z;35Z5\40;4$/$1;354$/f630%1D;-./;4<5$11%4X3; [06[4;34/>c*i>)J M&S/();4<565Q95.4<5/;6"S e8I4<9.$\5Z;35<0Q4<-<.56-%;6 R=**b";350\5.0X5.56-%;6R=*"b0/Z;356;0/Z0.ZZ5\40;4$/R=(+b:$<90.5Z[4;3 e8I$9;4<4P0;4$/"9.$\4Z4/X R5;;5.6$%-;4$/_-0%4;=0/Z6;0R4%4;=&S e8I f6%4/50.Z5:0= 6;.0;5X=5115:;4\5%=:$/;.$%%5Z;35.5Z-:;4$/$1;35\$%;0X5-9Z0;56;5964P50/Z[060R%5 ;$<55;;35X%$R0%650.:30/Z.514/5<5/;$1;357B D C I^<0660/0%=P5.\$%;0X590.0<5D ;5.$9;4<4P0;4$/9.$R%5<&S;30Z X$$Z:$/\5.X5/:50/Z:$/\5.X5/:56955Z&C346[$.] 9.$\4Z5Z0106;0/Z5115:;4\5<5;3$Z1$.$9;4<4P4/X;35\$%;0X590.0<5;5.6$1;35 7B D C I^<0660/0%=P5.0/Z35%95Z;$4<9.$\5;3595.1$.<0/:5$1;3460/0%=P5.&C35 .56-%;663$[5Z;30;;35S e8I460R%5;$$R;04/0%4<4;4/X<066.56$%-;4$/$1<$.5;30/ N>))))"[34:3306R5;;5.95.1$.<0/:5:$<90.5Z[4;3;35e8I&C35<5;3$Z306;35 0Z\0/;0X56$164<9%5$95.0;4$/"106;$9;4<4P0;4$/0/ZR5;;5.6$%-;4$/"[34:3:0/9.$\4Z5 0<5;3$Z.515.5/:51$.\$%;0X5$9;4<4P0;4$/$17B D C I^<0660/0%=P5.0/Z;3-64<9.$\5 ;35Z5\5%$9<5/;5114:45/:=$17B D C I^<0660/0%=P5.&0(@"-!)*<-%;49%5.51%5:;4$/;4<5D$1D1%4X3;<0660/0%=P5.#90.;4:%56[0.<$9;4<4P0;4$/ !e8I$#$9;4<4P0;4$/$1\$%;0X5#4$/$9;4:664<-%0;4$/!!飞行时间质谱!C I^D78$是一种常用的质谱分析技术(>D()"具有灵敏度高%操作简单等优点"被广泛用于生物医药(*)%环境科学(!)%食品科学(")等领域&多次反射飞行时间!7B D C I^$作为一种新型的质量分析器"通过在(组无网反射镜之间形成的非线性静电场中约束离子"延长离子的飞行距离和飞行时间(M)"以获得超高的质量分辨率!%>i>)"$"现已被亥姆霍兹重离子研究中心!W8S$(D N)%欧洲核子研究中心!2`B'$(+D>))和高能加速器研究机构!O`O$(>>D>()等机构用于测量短寿命离子质量(>*)%分离同重核素(+">!D>")以及存储离子(>M D>?)等&质量分辨率受电压参数的影响"7B D C I^质量分析器具有以下特点*>$>)多个电极#($电压敏感!变化>)J""质量分辨率下降")b$#*$电压组合规律不明显!非线性静电场$&因此"电压优化工作非常繁琐"使用人工调试或计算机均匀扫描均难以快速完成&局部优化算法可用于7B D C I^质量分析器的电压参数优化&8:3-%;P等(>N)采用梯度下降法得到了>c*i>)"的质量分辨率#g$%1等(>+)% 230-\50-等(())%V$$/等((>)采用'5%Z5.D750ZNMM质谱学报!!第!!卷Copyright©博看网. All Rights Reserved.单纯形算法分别得到了N c)i>)!%*c(i>)"% >c>i>)"的质量分辨率&但以上算法仅能寻找局部最优参数"最终结果受人为设定的初始值影响&7-..0=((()借助全局优化算法"采用遗传算法D'5%Z5.D750Z单纯形混合算法"先在大参数空间下粗略搜索出优势区域"再对其进行精细优化"得到了c)i>)!的质量分辨率&但遗传算法存在参数较多%收敛较慢等问题&相比于上述算法"粒子群!e8I$算法具有搜索速度快%对初始值不敏感%全局搜索能力强%参数易调整等优点&本工作拟采用e8I算法"结合离子光学模拟"以优化7B D C I^质量分析器的电压参数#并通过测试e8I算法和改进粒子群!S e8I$算法的性能"对比(种算法的优化结果&A!实验部分A B A!离子光学模拟采用离子光学模拟软件8S7S I'D()()((*)进行离子飞行轨迹计算&模拟实验忽略了机械结构误差%电源波动%残余气体和空间电荷效应的影响"因此"与实际应用结果存在一定差异& A B A B A!模型!7B D C I^质量分析器模型使用O`O的7B D C I^质量分析器几何结构(>("(!)"由多个圆环电极共轴排列而成"总长度+"!<<"包括(个反射镜和>个漂移管"每个反射镜由N 个电极组成"网格划分精度为)c)"<<'X.4Z"示于图>&A B A B C!初始设置!离子初始状态与文献((")的设置相同&以能量O K>c"]5#"能量标准偏差`K N c"5#的>**26H为研究对象"离子数量设为")个#离子起始位置位于7B D C I^质量分析器的几何中心平面"J K0K)"位置标准偏差J K 0K><<#离子在?方向上的出射角度为)<.0Z"角度标准偏差K K>c"<.0Z#各参数均为高斯分布&A B A B F!质量分辨率计算!7B D C I^质谱仪的工作过程为*离子从离子源出发"到达7B D C I^质量分析器后被捕获"进行多次反射飞行&离子从分析器内某一点出发经(个反射镜反射后回到该点"视为飞行>圈&当飞行一定时间后"离子被引出检测器"完成检测&整个检测过程可视为(部分*>$离子从离子源.穿过/ 7B D C I^质量分析器直达检测器#($离子在7B D C I^质量分析器进行多次反射&7B D C I^质量分析器的质量分辨率((M)计算公式如下*A<W<&<B(&BWB9;Y E B)(!&/Y E&/)$!>$式中"B9;是离子从离子源.穿过/分析器直接到达检测器的飞行时间#E是飞行圈数#B)是离子在7B D C I^质量分析器内飞行>圈的时间# &/是离子从离子源.穿过/分析器直接到达检测器的时间展宽#&/)是7B D C I^质量分析器飞行>圈引起的时间展宽&当E无限大时"B9;的影响被抵消"质量分辨率趋于B)'!(&/)$"此时得到的质量分辨率称为极限分辨率A<"<0Q"其受限于7B D C I^质量分析器引起的时间展宽&本工作采用.时间焦点/固定的聚焦模式((?)"计算离子飞行半圈后回到起点所在平面的C I^标准偏差 ;$1"从而计算得出A<"<0Q&此聚焦模式将7B D C I^质量分析器的(个反射镜视为完全相同的单元"采用离子飞行半圈方式得到的极限质量分辨率评价电压参数的优劣"不仅可以节约模拟时间"还可以减少优化变量"提高优化效率&图A!>131P G中的32=:P I质量分析器模型I#9J A!32=:P I4&))&%&'(N0-4"!0'#%>131P G+ M M第"期!!黄!奇等*基于粒子群算法的多次反射飞行时间质量分析器电压优化Copyright©博看网. All Rights Reserved.A B C !粒子群算法e 8I 算法是一种基于群体协作的搜索算法((N )"按照一定的规则更新随机初始化的粒子速度和位置"在多维搜索空间中搜索出最优解"实现最优的目标适应值&在7B D C I ^质量分析器电压参数优化中"粒子的位置代表>组电压参数"目标适应值是7B D C I ^质量分析器所能实现的极限质量分辨率A <"<0Q &e8I 算法的作用是通过指导电压参数的更新"寻找使7B D C I ^质量分析器的A <"<0Q 达到最大的电压参数&假设待优化问题的搜索空间为@维"第*个粒子的位置表示为U *K !J *>"J *("+"J *N $"其所经历的最优位置表示为:*K !;*>";*("+";*N $"即:R 56;"整个群体所经历的最优位置表示为:&K !;&>";&("+";&N $"即:W R 56;&粒子*的移动速度表示为T *K !+*>"+*("+"+*N $"根据以下公式进行粒子速度和位置的更新*T /Y>*W S T /*Y '>->!:R 56;X U /*$Y '(-(!:W R 56;X U /*$!($U /Y >*W U /*Y T /Y >*!*$式中"群体中粒子个数*K>"("+"3#'>和'(为学习因子#->%-(为)!>之间的随机数#/为当前迭代次数#S 为速度权重&A B F !改进粒子群算法速度权重S 控制着粒子的上一步速度对当前速度的影响程度"较大的S 有利于增强算法的全局搜索能力"较小的S 有利于增强算法的局部搜索能力&e 8I 算法中的S 为固定值"无法同时实现较强的全局和局部搜索能力&本文采用速度权重线性衰减的改进e 8I!S e 8I $算法((+)"对S 的取值方式进行改进"根据式!!$"使S 随着迭代的进行从最大值线性减小至最小值"以兼顾全局和局部搜索能力&S W S <0Q X !S <0Q X S <4/$Z */,-'*/,-<0Q !!$式中"S <0Q 为速度权重最大值"S <4/为速度权重最小值"*/,-为当前迭代次数"*/,-<0Q 为最大迭代次数&C !结果与讨论C B A !T >P 算法不同初始参数性能测试比较e 8I 算法不同初始参数的优化结果"设定*/,-<0Q K !))"S K )c N "'>K '(K >c "&为避免偶然性"各条件下算法重复运行()次"得到统计结果&C B A B A !种群规模的影响!本实验测试了种群规模分别为*)和M )个粒子数的算法优化效果"列于表>&可以看出"不同种群规模下的优化结果相差不大"且随着种群规模增加>倍"优化时间成本也增加>倍&为降低优化时间成本"采用粒子数为*)的种群规模&表A !不同种群规模的优化结果对比:&;'0A !+"47&-#)"%"*"7/#4#N &/#"%-0)K '/)@#/,!#**0-0%/7"7K '&/#"%)#N 0)种群规模e $9-%0;4$/64P 5平均值750/\0%-5最大值70Q 4<-<\0%-5标准偏差8;0/Z 0.Z Z 5\40;4$/*)!)))))M )M ?M N >)))))M )*N ))))M >*!N ">"))))C B A B C !速度权重的影响!本实验测试了S 分别为)c N %)c "和)c (时的e 8I 算法优化效果"列于表(&可以看出"S K )c N 优化结果的平均值和最大值均优于另外(种情况"但收敛性较差"收敛成功率仅为>)b #S K )c (优化结果的平均值最小"但收敛性最好"收敛成功率达+"b &S 的测试为S e 8I 算法的参数设置提供了参考&表C !不同速度权重的优化结果对比:&;'0C !+"47&-#)"%"*"7/#4#N &/#"%-0)K '/)@#/,!#**0-0%/4速度权重S平均值750/\0%-5最大值70Q 4<-<\0%-5标准偏差8;0/Z 0.ZZ 5\40;4$/收敛成功率8-::566.0;5$1:$/\5.X5/:5'b )c N !)))))M )M ?M N >)))))>))c "**))))">))))N ))))M ))c (>!))))"N ))))>?))))+")?M 质谱学报!!第!!卷Copyright ©博看网. All Rights Reserved.C B C !T >P 算法与1T >P 算法性能对比将e 8I 算法与S e 8I 算法进行对比"*/,-<0Q K !))"'>K '(K >c ""优化结果列于表*&e 8I 算法的S K )c N "S e 8I 算法的S <0Q K)c N %S <4/K)c (&S e 8I 算法优化的最优A <"<0Q K N c >i >)""相比e 8I 算法的M c )i >)"提高了**b "平均优化结果提高了*"b "标准偏差降低了(+b &S e 8I 算法优化的最优电压参数7>!7N 分别为()+"c N (%+>)c +)%>+>N c >?%N M c +N %(>)c +M %J !>(N c +!%J M "M >c ++%J *>N (c M "#&可见"S e 8I算法具有更好的优化结果以及更高的稳定性&表F !T >P 算法和1T >P 算法的优化结果:&;'0F !P 7/#4#N &/#"%-0)K '/)"*T >P&'9"-#/,4&%!1T >P&'9"-#/,4算法A %X $.4;3<平均值750/\0%-5最大值70Q 4<-<\0%-5标准偏差8;0/Z 0.Z Z 5\40;4$/e 8I !)))))M )M ?M N >)))))S e 8I"!))))N )+>!)N ))))图C !1T >P 算法和T >P 算法最优结果中当代最优!4 4&6随迭代次数的变化情况I #9J C !W &-#&/#"%"*."%/047"-&-("7/#4&'!4 4&6@#/,/,0%K 4;0-"*#/0-&/#"%)#%/,0"7/#4&'-0)K '/)"*1T >P&'9"-#/,4&%!T >P&'9"-#/,4S e 8I 算法和e 8I 算法当代最优A <"<0Q 随迭代次数的变化情况示于图(&e 8I 算法能够寻找到多个局部最优解"在M )次迭代时"得到超过!i >)"的分辨率"而S e 8I 算法需要())次迭代才能得到同等结果&e 8I 算法从M )代到!))代优化中"迭代次数增加了约M 倍"适应值仅提高了")b "在优化后期"e 8I 算法出现了在最优解附近振荡的现象&S e 8I 算法在前>")代"A <"<0Q 处于较低水平">")!(()代之间"A <"<0Q 出现大幅增长"随后算法进入收敛状态"适应值趋于稳定&以上结果表明"e 8I 算法具有较强的前期搜索能力"但难以保持稳定"无法进行精细化搜索"而S e 8I 算法拥有较强的精细化搜索能力"一旦搜索到较优区域"能够很快搜索到当前区域的最优值"并且保持稳定#e 8I 算法迭代!))次仍无法收敛"而S e 8I 算法在(")代左右即完成收敛"优化效率高于e 8I 算法&e 8I 算法和S e 8I 算法优化的N 个电压更新步长随迭代次数的变化情况示于图*&e 8I 算法的迭代步长虽然在粒子群算法本身的特性下逐渐衰减"但在优化后期"电压更新步长依然处于比较宽的范围内&电压在较宽范围内的变化将造成A <"<0Q 的显著变化"这是e 8I 算法无法收敛%在最优值附近振荡的原因&而S e 8I 算法的速度权重线性衰减策略能够很好地控制电压更新步长的减小"在前期与e 8I 算法的电压更新步长范围基本相同"随着迭代次数的增加"电压更新步长降低"进而实现对优势区域的局部精细化搜索"在())!*))代之间"大多数电极电压已完成收敛"保持稳定&因此"S e 8I 算法具有较好的收敛性和较快的收敛速度"且对7B D C I ^质量分析器电压优化问题具有更好的适用性&e 8I 算法采用的速度权重是固定的"无法控制电压更新步长收缩至优化问题局部精细化搜索所需的步长范围&而S e 8I 算法改进了速度权重的取值方式"采用线性衰减的方式使速度权重随迭代次数逐渐减小"从而使电压更新步长逐渐收缩至优化问题局部精细化搜索所需的步长范围&这种改进使S e 8I 算法具备了良好的全局和局部搜索效果"能够获得更好的优化结果&C B F !1T >P 算法最优结果分析7B D C I ^质量分析器的电压影响着飞行时间相对偏差与能量相对偏差的关系"飞行时间相对偏差对能量相对偏差的容忍度越高"则质量分辨率越高&在最优电压参数下"半圈飞>?M 第"期!!黄!奇等*基于粒子群算法的多次反射飞行时间质量分析器电压优化Copyright ©博看网. All Rights Reserved.注*图中右下角数字代表电极编号图F !C 种算法优化的电压更新步长随迭代次数的变化情况I #9J F !W &-#&/#"%"*/,08"'/&90K 7!&/0)/07)#N 0@#/,/,0%K 4;0-"*#/0-&/#"%)*"-/,0/@"&'9"-#/,4)"7/#4#N &/#"%图O !离子半圈飞行时间相对偏差随能量相对偏差的变化关系I #9J O !20'&/#80!08#&/#"%"*#"%,&'*=/K -%/#40"**'#9,/&)&*K %./#"%"*-0'&/#80!08#&/#"%"*0%0-9(行时间相对偏差与能量相对偏差的关系示于图!&通过对半圈飞行时间相对偏差与能量相对偏差变化关系进行"次多项式拟合"得到*&B B )W (c >Z >)X >)X (c +Z >)X"Z &O O )Y>c ""Z >)X*!Z &O O $)(Y )c (!!Z `O $)*Y(c )!!Z &O O $)!X )c ??!Z &O O $)"!"$对&O 'O )求导后">阶和(阶项系数接近于)"可认为优化后的电势分布实现了时间关于能量的(阶聚焦&在能量分散为!>"))L ("$5#离子状态下"半圈飞行时间最大相对偏差在>c *i>)J M 以内&对能量分散更大的!>"))L ")$5#离子满足同样的(阶聚焦"半圈飞行时间最大相对偏差在>i >)J "以内&当离子能量大于初始平均能量!>"))5#$时"时间偏差随能量偏差增长较快#而离子能量小于初始平均能量!>"))5#$时"时间偏差随能量偏差增长较慢&这表明"相比能量更小的离子"优化后的静电场难以对能量更大的离子进行能量补偿&因为能量更大的离子路径更长"经历了还未优化后的静电场"表现出较差的能量补偿#而能量更小的离子经历的静电场均是经过优化的"能够较好地保证能量补偿&这表明算法只针对离子实际经历的静电场进行优化"而对路径外的静电场优化力度不足"优化结果与所使用的离子能量状态有关&上文计算A <"<0Q 的方式是离子飞行半圈"&/被忽略&为了与实际应用结合"测试了&/K ()/6时"质量分辨率与飞行圈数的关系&将7B D C I ^质量分析器的(个反射镜对称施加相同电压"根据离子每次飞行至7B D C I ^质量分析器中心平面"测量其飞行时间和飞行时间标准偏差"从而计算出当前飞行圈数下的质量分辨率"示于图"&可见"质量分辨率随飞行圈数的增加而增加"最终接近A <"<0Q &但实际应用中"离子的飞行圈数并不能任意增加"主要受限于以下几个方面*>$真空度的限制&分析器(?M 质谱学报!!第!!卷Copyright ©博看网. All Rights Reserved.内部的残余气体造成离子损失"进而降低信号强度#($电源稳定性的限制&长时间的飞行对电源稳定性提出了更高要求#*$空间电荷效应的影响&由于离子间存在空间电荷效应"在长时间的相互作用下"将影响离子飞行轨迹的稳定#!$检测时间短的需要&当离子飞行()<6!M ))圈$时"能够达到"i>)"的质量分辨率&7B D C I ^质量分析器的多圈飞行结果为仪器调试提供了重要参考&图Q !质量分辨率随离子飞行圈数的变化情况I #9J Q !W &-#&/#"%"*4&))-0)"'K /#"%@#/,/,0%K 4;0-"*#"%*'#9,//K -%)F !结论本研究开发了基于e 8I 算法的7B D C I ^质量分析器电压参数优化方法"并对e 8I 算法进行改进"此方法可以优化7B D C I ^质量分析器的电压参数"以获得更高的质量分辨率&基于8S 7S I '模拟"采用节省时间%减少优化变量的离子飞行半圈计算A <"<0Q 的方式&对O K>c "]5#% `KN c "5#% Q K =K><<% )K *K>c "<.0Z 的>**26H"&/K )/6时"e 8I 算法获得A <"<0Q 超过M )))))"S e 8I 算法获得A <"<0Q 为Nc >i>)"#&/K()/6时!飞行()<6%M ))圈$"S e 8I 算法获得质量分辨率为"i >)"&S e 8I 算法优化得到的最佳结果能够实现7B DC I ^质量分析器的时间关于能量的(阶聚焦"离子的半圈飞行时间偏差在>c *i>)J M以内&e 8I 算法的平均结果为!)))))"最优结果为M )M?M N "标准偏差为>)))))#S e 8I 算法的平均结果为"!))))"最优结果为N )+>!)"标准偏差为N ))))&S e 8I 算法相比于e 8I 算法优化的平均结果提高了*"b "最优结果提高了**b "标准偏差降低了(+b "具有更好的优化结果和稳定性&S e 8I 算法的速度权重线性衰减策略有效地控制了电压更新步长"能够满足7B D C I ^质量分析器电压参数优化问题全局搜索和局部搜索的要求"具有较好的收敛性和收敛速度&本研究表明"S e 8I 算法能够解决7B D C I ^质量分析器电压参数的优化问题"具有较好的适用性和稳定性"可以提高电压参数的优化效率&参考文献(>)!BA @S I 'I #A A "^S E S e e I #S "@`B B S 2Oe,&S /9-.6-4;$1.56$%-;4$/4/;4<5D $1D 1%4X 3;<066695:;.$<5;.=*0346;$.4:0%95.695:;4\5*4/9-.6-4;$1.56$%-;4$/4/;$1<066695:;.$<5;.=(,)&7066895:;.$<5;.=B 5\45[6"()>M "*"!M $*?*N D ?"?&(()!a I `8E T&C 4<5D $1D 1%4X 3;<066695:;.$<5;.=*4/;.$Z -:;4$/;$;35R 064:6*;4<5D $1D 1%4X 3;<066695:;.$<5;.=(,)&7066895:;.$<5;.=B 5\45[6"()>?"*M !>$*N M D >)+&(*)!黄建鹏"贺玖明"朱辉"李铁钢"黄正旭"莫婷"李梅&国产高分辨飞行时间质谱仪在药物分子结构鉴定中的应用(,)&质谱学报"()>M "*?!"$*!*>D !*+> A 'W,40/95/X "G `,4-<4/X "Y GT G -4"E S C 45X 0/X "GT A 'WY 35/X Q -"7IC 4/X "E S754&A /0%=646$1930.<0:5-;4:0%<$%5:-%561$.6;.-:D ;-.54Z 5/;414:0;4$/R =Z $<56;4:34X 3.56$%-;4$/;4<5D $1D 1%4X 3;<066695:;.$<5;5.(,)&,$-./0%$1234/5657066895:;.$<5;.=8$:45;="()>M "*?!"$*!*>D !*+!4/234/565$&(!)!解迎双"张欢"王娟"王波&实时直接分析D 串联质谱法快速测定环境水体中涕灭威及其代谢物(,)&质谱学报"()(("!*!>$*++D >)N &U S `V 4/X 63-0/X "Y GA 'W G -0/"gA 'W,-0/"gA 'W a $&B 094ZZ 5;5.<4/0;4$/$10%Z 4:0.R0/Z 4;6<5;0R $%4;564/[0;5.5/\4.$/<5/;R =.50%D ;4<5Z 4.5:;0/0%=646D ;0/Z 5<<066695:;.$<5;.=(,)&,$-./0%$1234/5657066895:;.$<5;.=8$:45;="()(("!*!>$*++D >)N !4/234/565$&(")!林黛琴"万承波"邱萍"刘花梅&液相色谱D 串联质谱法快速测定食品中!种黄色工业染料(,)&质谱学报"()>*"*!!*$*>?)D >?N &E S '@04_4/"gA '235/X R $"F S T e 4/X "E S TG -0<54&B 094ZZ 5;5.<4/0;4$/$11$-.34X3=5%%$[*?M 第"期!!黄!奇等*基于粒子群算法的多次反射飞行时间质量分析器电压优化Copyright ©博看网. All Rights Reserved.Z=564/1$$Z6R=G e E2D78'78(,)&,$-./0%$1234/5657066895:;.$<5;.=8$:45;="()>*"*!!*$*>?)D>?N!4/234/565$&(M)!gI E E'S O G"2A8A B`8A&A/5/5.X=D46$:3D .$/$-6<-%;4D9066;4<5D$1D1%4X3;<066695:;.$<5D ;5.:$/646;4/X$1;[$:$0Q40%5%5:;.$6;0;4:<4..$.6(,)&S/;5./0;4$/0%,$-./0%$17066895:;.$<5;.="())*"((?!($*(>?D(((&()!e E A y g B"@S2O`E C"82G`S@`'a`B W`B 2&7-%;49%5D.51%5:;4$/;4<5D$1D1%4X3;<066695:D ;.$<5;.=(,)&S/;5./0;4$/0%,$-./0%$17066895:D ;.$<5;.="()>*!*!+'*")$*>*!D>!!&(N)!@S2O`E C"e E A y g B"a`2O`B A"2Y I O T"W`S88`E G"GA`C C'`B`",`82G2"O S'8`E g"e`C B S2O7"82G`S@`'a`B W D`B2"8S7I'A"V A#I B7S&A34X3D95.D 1$.<0/:5<-%;49%5D.51%5:;4$/;4<5D$1D1%4X3;<066695:;.$<5;5.0/Z46$R0.6590.0;$.1$.;35.5650.:3[4;35Q$;4:/-:%54(,)&'-:%50.S/6;.-D<5/;60/Z75;3$Z64/e3=64:6B5650.:385:;4$/A*A::5%5.0;$.6"895:;.$<5;5.6"@5;5:;$.60/ZA66$:40;5Z`_-49<5/;"()>""???*>?(D>N N& (+)!gI E^B'"g S`'G I E C Y^"A C A'A8I#@"a`2O@"a E A T7O"a I B W7A''2G"G`B^T B C G^"O IgA E8O A7"O B`S78"E S C#S'I#V A"E T''`V@"7A'`A#"'`S@G`B B@"B I8`'a T82G7"82Gg D`S O G A B@E"8C A',A,"Y T a`B O&S8I E DC B A e36<-%;4D.51%5:;4$/;4<5D$1D1%4X3;<0666590D.0;$.'695:;.$<5;5.(,)&S/;5./0;4$/0%,$-./0%$17066895:;.$<5;.="()>*!*!+'*")$*>(*D>**& (>))g S`'G I E C Y^"a`2O@"a E A T7O"a I B W D 7A''2G"a B`S C`'^`E@C7"2A O S B E SBa"W`I B W`8"G`B^T B C G^"G I E C,@"O IgA E8O A7"O B`S78"E T''`V@"7A'`A#"7`'v'@`Y,"'`S@G`B B@"B I8`'a T82G7"82Gg`S O GA B@E"82G Dg`'O A"8S7I'S8,"8C A',A,"gI E^B'"Y T a`BO&706656$15Q$;4::0%:4-<46$;$95694/Z$[//-:%50.1$.:56(,)&'0;-.5"()>*"!+N!!"!$**!M D*!+&(>>)S C I V"82GT B V e"gA@A7"'A S7S8"8I'I@A C"7S C A G"A B A S^"C A O A7S'`A"I O A@A O"I Y AgA A"gI E E'S O G& 84/X%5D.515.5/:534X3D9.5:464$/<066<506-.5D<5/;[4;30<-%;4.51%5:;4$/;4<5D$1D1%4X3;<066695:;.$X.093(,)&e3=64:0%B5\45[2"()>*"N N!>$*)>>*)M&(>()82GT B V e"gA@A7"S C I V"A B A S^"'A S7S8"8I'I@A C"gI E E'S O G"8G2G`e T'I##A"87I B B A2"V T A'2&A34X3D.56$%-;4$/<-%;4D.51%5:;4$/;4<5D$1D1%4X3;<066695:;.$X.0931$.9.5:464$/<066<506-.5D<5/;60;B S O`''8E IgB S(,)&'-:%50.S/6;.-D<5/;60/Z75;3$Z64/e3=64:6B5650.:385:;4$/a*a50<S/;5.0:;4$/6[4;370;5.40%60/ZA;$<6"()>!"**"**+D"*&(>*)O T E S O I#S"A E W I B A A"A C A'A8I#@"A82G`Be"a E A T7O"2A O S B E SBa"G`B DE`B C A"GT A'W g,"O A B C G`S',"E S C#S'I#V A"E T''`V@"7A'`A#"7I T W`I C7"82Gg`S O GA B@E"g`E O D`B A"g S`'G I E C Y^&706656$163$.;D%4\5Z!+8:"")8:"?)A6"?*a.0/Z6;0R%5>+M G X/-:%4Z56(,)&'-:%50.e3=64:6A"()()">))(*>(>++)& (>!)e S`2GA2Y`O A"8G2G`e T'I##"2A B C D `B G O"a A C2G`E@`B,2"Y W A',A B`^"E S@@S2O8'"gI E E'S O G"GT V"W B S^D^S C G aI&@5\5%$9<5/;$1034X3.56$%-;4$/46$DR0.6590.0;$.1$.6;-Z=$15Q$;4:Z5:0=6(,)&'-D:%50.S/6;.-<5/;60/Z75;3$Z64/e3=64:6B5D650.:385:;4$/a*a50<S/;5.0:;4$/6[4;370;5.4D0%60/ZA;$<6"())N"(M M!>+'()$*!">)D!">!& (>")e E A y g B"@S2O`E C"2Y I O T"W`S88`E G"e`C B S2O7"B`S'G`S7`B O"82G`S D@`'a`B W`B2"V A#I B7S&S6$R0.6590.0D ;4$/R=;4<5D$1D1%4X3;<066695:;.$<5;.=1$.%$[D5/5.X=.0Z4$0:;4\54$/R50<10:4%4;456(,)&'-:%50.S/6;.-<5/;60/Z75;3$Z64/e3=64:6B5650.:385:;4$/a*a50<S/;5.0:;4$/6[4;370;5.40%60/ZA;$<6"())N"(M M!>+'()$*!"M)D!"M!&(>M)a`''`B g G&A X0;5Z5%5:;.$6;0;4:4$/;.09;$ .595;4;4$-6%=<506-.5;35:30.X50/Z<'?$1%0.X55%5:;.$69.0=4$/6(,)&A/0%=;4:0%235<46;.=">++?"M+!()$*!>M(D!>M N&(>?)@A GA'7"^S8G7A'B"G`a`B I"B A e De A e I B C7"A E C8C`S''"Y A,^7A'@"\0/Z5.Y A'@`g,&A/5[;=95$15%5:;.$6;0;4: 4$/;.091$.6;$.0X5$1106;4$/R50<6(,)&B5\45[$18:45/;414:S/6;.-<5/;6">++N"M+!>$*?M D N*& (>N)82GT E C Ya`"O`E E V,7"'S2I E I^^2"E I'W,"B V A'8"a B I@`T B7&2$/6;.-:D;4$/0/Z64<-%0;4$/$10<-%;4D.51%5:;4$/;4<5D$1D1%4X3;<066695:;.$<5;5.0;;35-/4\5.64;=$1!?M质谱学报!!第!!卷Copyright©博看网. All Rights Reserved./$;.5Z0<5(,)&'-:%50.S/6;.-<5/;60/Z75;3D$Z64/e3=64:6B5650.:385:;4$/a*a50<S/;5.0:D ;4$/6[4;370;5.40%60/ZA;$<6"()>M"*?M*(">D(""&(>+)g I E^B'"`B S C C7"7A B U W"82Gg D `S O G A B@E&A<-%;4D.51%5:;4$/;4<5D$1D1%4X3;<0666590.0;$.1$.46$R0.4:9-.414:0;4$/$1.0Z4$D0:;4\54$/R50<6(,)&G=95.14/5S/;5.0:;4$/6"()>>">++!>'*$*>>"D>((&(())2G A T#`A Te"@`E A G A V`e"Z5^B A'2`W"5%A a S B8"E I B V,"7`B B`B V"B I8`'Da T82G7"82Gg`S O GA B@E"gI E^B'&e S E W B S7"0<-%;4D.51%5:;4$/;4<5D$1D1%4X3;<066695:;.$<5;5.1$.694.0%(D8*0;W A'S E(,)&'-D:%50.S/6;.-<5/;60/Z75;3$Z64/e3=64:6B5D650.:385:;4$/a*a50<S/;5.0:;4$/6[4;370;5.4D0%60/ZA;$<6"()>M"*?M*(>>D(>"&((>)V I I',g"e A B O V G"S7O a"O S7W@"O S7V O&@564X/6;-Z=1$.0<-%;4D.51%5:;4$/;4<5D$1D1%4X3;<066695:;.$X.0931$.\5.=63$.;%4\5Z/-:%54(2)&e.$:55Z4/X6$1;352$/15.5/:5$/A Z\0/:564/B0Z4$0:;4\5S6$;$958:45/:5!A B S8()>!$"C$]=$",090/*,$-./0%$1;35e3=64:0%8$:45;=$1,090/"()>"&((()7T B B A V O&C35Z564X/0/Z$9;4<4P0;4$/$10 <-%;4D.51%5:;4$/;4<5D$1D1%4X3;<066D695:;.$<5;5.1$.a0.4-<;0X X4/X[4;3/`U I0/Z$9;4<4P0;4$/$1;35>*?U5\5;$[4;3`U I D())(@)&20/0Z0*7:W4%%T/4\5.64;="()>N&((*)@A G E@A&84<4$/1$.;3595.6$/0%:$<9-;5.4/ .51%5:;4$/(,)&S/;5./0;4$/0%,$-./0%$17066895:;.$<5;.="()))"())!>'*$**D("&((!)82GT B V e"I O A@A O"8G2G`e T'I#8"8I'I@A C"C A O A7S'`A"gA@A7"gI E E'S O G"V A7A Y A O SV&7-%;4D.51%5:;4$/;4<5D$1D1%4X3;<066695:;.$X.0931$.63$.;D%4\5Z.0Z4$0:;4\54$/6(,)&C35`-.$950/e3=64:0%,$-.D/0%A"())+"!(!*$**!*&((")王永生"田玉林"王均英"周小红"黄文学&用于兰州彭宁离子阱的多反射飞行时间质量分析器的设计和优化(,)&原子核物理评论"()>?"*!!*$* M(!D M(+&gA'W V$/X635/X"C S A'V-%4/"gA'W,-/=D 4/X"Y G I T U40$3$/X"GT A'W g5/Q-5&@564X/0/Z$9;4<4P0;4$/$10<-%;4D.51%5:;4$/;4<5D$1D1%4X3;<066695:;.$<5;5.1$.E e C(,)&'-:%50.e3=64:6B5\45["()>?"*!!*$*M(!D M(+!4/234/565$&((M)V A#I B7"#`B`'C2G S O I#A"GA8S',"O I Y E I#a"W A#B S O7"C B T^A'I#A& e%0/0.<-%;4D.51%5:;4/X;4<5D$1D1%4X3;<0660/0%=DP5.[4;30h4X D60[4$/90;3(,)&e3=64:6e.$:5Z40"())N">**+>D!))&((?)@S2O`EC"V A#I B7S"E A'W,"e E A y g B"E S e e`B C g"W`S88`E G"82G`S@`'Da`B W`B2&@=/0<4:0%;4<51$:-66341;4/<-%;4D9%5D.51%5:;4$/;4<5D$1D1%4X3;<066695:;.$<5;5.6(,)&S/;5./0;4$/0%,$-./0%$17066895:;.$<5;.="()>?"!>(*>D?&((N)O`''`@V,"`a`B GA B C B&e0.;4:%56[0.< $9;4<4P0;4$/(2)&e.$:55Z4/X6$1S2''f+"D4/;5.D/0;4$/0%:$/15.5/:5$//5-.0%/5;[$.]6"S```">++"*>+!(D>+!N&((+)8G SV"`a`B GA B C B2&`<94.4:0%6;-Z=$190.;4:%56[0.<$9;4<4P0;4$/(2)&e.$:55Z4/X6$1;35>+++2$/X.566$/`\$%-;4$/0.=2$<9-;0;4$/D2`2++!20;&'$&++C G N!)M$"S```">+++*>+!"D>+")&!收稿日期*()(*D)*D>!#修回日期*()(*D)"D)!$"?M第"期!!黄!奇等*基于粒子群算法的多次反射飞行时间质量分析器电压优化Copyright©博看网. All Rights Reserved.。
粒子群优化算法的研究及改进

optimized function is differentiable,derivative
continuous.The PSO
is
simple in structure,fast in
convergence,few
in parameters and easy in programming.
So it has attracted researchers at home and abroad and applyed in many areas since it is
systematic
study
PSO
on
the aspects of
algorithm modification
and used
and its application.The main
content
is
arranged as
(1)Upon analysing the
capabilities systems is
1 3 benchmark functions.The results indicate that GPSO algorithm have improved
performance
(3)Based
on
of the
convergence
speed and the search accuracy. the
and the algorithm
to‘'premature
convergence”.Finally,the
PSO algorithm is not strong in of the
a
climbing ability and lack of
基于改进粒子群算法的工程设计优化问题研究

基于改进粒子群算法的工程设计优化问题研究在当今的工程领域,优化设计问题至关重要。
它不仅能够提高工程产品的性能和质量,还能有效降低成本和缩短研发周期。
而粒子群算法作为一种强大的优化工具,在解决工程设计优化问题方面展现出了巨大的潜力。
然而,传统的粒子群算法在某些复杂的工程问题中可能存在局限性,因此对其进行改进成为了研究的热点。
粒子群算法的基本原理是模拟鸟群觅食的行为。
在算法中,每个粒子代表问题的一个潜在解,它们在解空间中飞行,通过不断调整自己的速度和位置来寻找最优解。
粒子的速度和位置更新取决于其自身的历史最优位置和整个群体的历史最优位置。
这种简单而有效的机制使得粒子群算法在处理许多优化问题时表现出色。
然而,在实际的工程设计优化中,问题往往具有高维度、多约束和非线性等特点,这给传统粒子群算法带来了挑战。
例如,在高维度空间中,粒子容易陷入局部最优解;多约束条件可能导致算法难以满足所有约束;非线性特性则可能使算法的搜索变得困难。
为了克服这些问题,研究人员提出了多种改进粒子群算法的策略。
其中一种常见的方法是引入惯性权重。
惯性权重的引入可以控制粒子的飞行速度,使其在搜索过程中更好地平衡全局搜索和局部搜索能力。
较大的惯性权重有利于全局搜索,能够帮助粒子跳出局部最优;较小的惯性权重则有助于在局部区域进行精细搜索,提高解的精度。
另一种改进策略是对粒子的学习因子进行调整。
学习因子决定了粒子向自身历史最优位置和群体历史最优位置学习的程度。
通过合理设置学习因子,可以提高算法的收敛速度和搜索效率。
此外,还有一些研究将粒子群算法与其他优化算法相结合,形成混合算法。
例如,将粒子群算法与遗传算法相结合,利用遗传算法的交叉和变异操作来增加种群的多样性,避免算法早熟收敛。
在工程设计优化问题中,改进粒子群算法已经取得了许多显著的成果。
以机械工程中的结构优化设计为例,通过改进粒子群算法,可以在满足强度、刚度等约束条件的前提下,优化结构的形状、尺寸和材料分布,从而减轻结构重量,提高结构的性能。
多目标粒子群优化算法

多目标粒子群优化算法多目标粒子群优化算法(Multi-objective Particle Swarm Optimization, MPSO)是一种基于粒子群优化算法的多目标优化算法。
粒子群优化算法是一种基于群体智能的全局优化方法,通过模拟鸟群觅食行为来搜索最优解。
多目标优化问题是指在存在多个优化目标的情况下,寻找一组解使得所有的目标都能得到最优或接近最优。
相比于传统的单目标优化问题,多目标优化问题具有更大的挑战性和复杂性。
MPSO通过维护一个粒子群体,并将粒子的位置和速度看作是潜在解的搜索空间。
每个粒子通过根据自身的历史经验和群体经验来更新自己的位置和速度。
每个粒子的位置代表一个潜在解,粒子在搜索空间中根据目标函数进行迭代,并努力找到全局最优解。
在多目标情况下,MPSO需要同时考虑多个目标值。
MPSO通过引入帕累托前沿来表示多个目标的最优解。
帕累托前沿是指在一个多维优化问题中,由不可被改进的非支配解组成的集合。
MPSO通过迭代搜索来逼近帕累托前沿。
MPSO的核心思想是利用粒子之间的协作和竞争来进行搜索。
每个粒子通过更新自己的速度和位置来搜索解,同时借鉴历史经验以及其他粒子的状态。
粒子的速度更新依赖于自身的最优解以及全局最优解。
通过迭代搜索,粒子能够在搜索空间中不断调整自己的位置和速度,以逼近帕累托前沿。
MPSO算法的优点在于能够同时处理多个目标,并且能够在搜索空间中找到最优的帕累托前沿解。
通过引入协作和竞争的机制,MPSO能够在搜索空间中进行全局的搜索,并且能够通过迭代逼近最优解。
然而,MPSO也存在一些不足之处。
例如,在高维问题中,粒子群体的搜索空间会非常庞大,导致搜索效率较低。
另外,MPSO的参数设置对算法的性能有着较大的影响,需要经过一定的调试和优化才能达到最优效果。
总之,多目标粒子群优化算法是一种有效的多目标优化方法,能够在搜索空间中找到最优的帕累托前沿解。
通过合理设置参数和调整算法,能够提高MPSO的性能和搜索效率。
基于粒子群优化与高斯过程的协同优化算法

基于粒子群优化与高斯过程的协同优化算法1. 引言协同优化算法是一种结合多种优化算法的集成优化方法,通过合理的组合和协同,克服单一算法在优化问题上的局限性,提高优化效果。
本文将介绍一种基于粒子群优化和高斯过程的协同优化算法,通过利用粒子群算法的全局搜索特性和高斯过程的回归能力,实现更精确、高效的优化过程。
2. 粒子群优化算法粒子群优化算法(Particle Swarm Optimization, PSO)是一种模拟鸟群飞行行为的优化算法,通过模拟粒子在解空间的搜索和迭代过程,寻找最优解。
其基本原理是每个粒子通过跟踪自身历史最佳解(pbest)和整个种群的最佳解(gbest),根据经验和全局信息进行位置调整和速度更新,直到达到最优解或迭代次数达到设定值。
3. 高斯过程高斯过程(Gaussian Process)是一种常用的非参数模型,用于回归和分类问题。
它基于贝叶斯思想,通过对样本数据进行分析和建模,得到一个关于未知函数的概率分布。
高斯过程的主要特点是可以根据已有数据进行预测,同时给出了预测结果的不确定性。
4. 算法设计基于粒子群优化和高斯过程的协同优化算法将PSO和高斯过程相结合,通过以下步骤实现优化过程:4.1 初始化设定粒子的位置和速度的初始值,设定高斯过程的初始参数,设定迭代次数和停止条件。
4.2 粒子群优化利用PSO算法进行全局搜索,更新粒子的位置和速度,根据目标函数的值更新粒子的pbest和gbest。
4.3 高斯过程拟合根据粒子的位置和目标函数的值,使用高斯过程拟合出函数的概率分布,并获取每个位置处的函数均值和方差。
4.4 选择下一个位置根据粒子的速度和上一步得到的高斯过程拟合结果,选择下一个位置。
4.5 更新参数根据新的位置和目标函数的值更新高斯过程的参数。
4.6 终止条件判断判断是否达到设定的迭代次数或满足停止条件,若满足则终止优化过程,否则返回步骤4.2。
5. 算法优势基于粒子群优化和高斯过程的协同优化算法具有以下优势:5.1 全局搜索能力强通过引入粒子群优化算法,可以实现全局搜索,寻找到更接近最优解的位置。
粒子群优化算法及其在多目标优化中的应用

粒子群优化算法及其在多目标优化中的应用一、什么是粒子群优化算法粒子群优化算法(Particle Swarm Optimization,PSO)是一种智能优化算法,源自对鸟群迁徙和鱼群捕食行为的研究。
通过模拟粒子受到群体协作和个体经验的影响,不断调整自身的位置和速度,最终找到最优解。
PSO算法具有简单、易于实现、收敛速度快等优点,因此在许多领域中得到了广泛应用,比如函数优化、神经网络训练、图像处理和机器学习等。
二、PSO在多目标优化中的应用1.多目标优化问题在现实中,多个优化目标相互制约,无法同时达到最优解,这就是多目标优化问题。
例如,企业在做决策时需要考虑成本、效益、风险等多个因素,决策的结果是一个多维变量向量。
多目标优化问题的解决方法有很多,其中之一就是使用PSO算法。
2.多目标PSO算法在传统的PSO算法中,只考虑单一目标函数,但是在多目标优化问题中,需要考虑多个目标函数,因此需要改进PSO算法。
多目标PSO算法(Multi-Objective Particle Swarm Optimization,MOPSO)是一种改进后的PSO算法。
其基本思想就是将多个目标函数同时考虑,同时维护多个粒子的状态,不断优化粒子在多个目标函数上的表现,从而找到一个可以在多个目标函数上达到较优的解。
3.多目标PSO算法的特点与传统的PSO算法相比,多目标PSO算法具有以下特点:(1)多目标PSO算法考虑了多个目标函数,解决了多目标优化问题。
(2)通过维护多个粒子状态,可以更好地维护搜索空间的多样性,保证算法的全局搜索能力。
(3)通过优化粒子在多个目标函数上的表现,可以寻找出在多目标情况下较优的解。
三、总结PSO算法作为一种智能优化算法,具备搜索速度快、易于实现等优点,因此在多个领域有广泛的应用。
在多目标优化问题中,多目标PSO算法可以通过同时考虑多个目标函数,更好地寻找在多目标情况下的最优解,具有很好的应用前景。
基于离散粒子群算法的多飞行器在轨服务任务分配

能量 时间模 型 ,但仅 考虑 飞行器 能量 消耗和 时 问两项 因素 ,讨 论 也仅 限于单 个 飞行 器 ;文 献 E ] 6 采
用整数 规划 方法 通过设 计决 策变量 和形 式化 各种约 束 ,较好 地解决 了任务 指派 问题 ,但是 并没 有综
合考 虑飞行 器在 整个 服务 过程 中 自身 的损耗 ;文献 I ] - 以对 目标 的毁 伤最 大 和 自身 消 耗最 小 为 任务 7
局 限于任务 的平 衡 ,没有 考虑到 自身 指标 。使用线 性规 划 、动态 网络流 等方法 对 多任务 分配 问题进 行建模 ,虽然这 些模 型简 单 、易 于实 现 ,但 目标 函数 过于 简单 ,不 能完 全描 述关 键 指标 。服务 。 飞行器 协 同任务 分配 中 ,各飞行 器 的控制必 须相 互协调 ,采 用基 于动力 学方法 建立 双脉 冲优化 制导 模 型 ,综合 考虑 飞行器 消耗 、提供 服 务所获 收益 最大 、轨 道转 移 所 需能 量 以及 消 耗 时 间关键 指 标 , 协 同多飞 行器进 行任 务分 配 。 本 文 针对在 轨服 务飞 行器任 务分 配 问题 的特 点 ,设计 了新 的离 散粒 子 群位 置 与 速度 更 新公 式 , 提 出了一 种新 的在 多约束 条件下 ,基 于离散 粒 子群算 法 的多服务 飞行 器 目标 分配方 法 。
( 1海 军 航 空 工 程 学 院 ,烟 台 2 4 0 ) 6 0 1
( 2清华 大学 ,北 京 10 8 ) ( 0 0 4 3智 能 技 术 与 系统 国 家 重点 实 验 室 ,北 京 1 0 8 ) 00 4
摘要 为解 决 多约束 条件 下飞行 器在轨 服务任 务 分配 问题 ,以在轨 卫星群 为研 究 对 象 , 提 出了一种基 于 离散 粒子 群 算法的 多服务 飞 行 器 的 目标分 配 方 法 ,综 合 分析 目标 飞行 器价 值 、服 务飞行 器 消耗 以及 能量 时 间消耗等 3项 关键 指标 因素 ,建 立 了在轨 服 务任 务 分 配 问
基于粒子群算法的路径规划优化研究
基于粒子群算法的路径规划优化研究路径规划是人工智能领域中一项重要的技术,它在自动驾驶、机器人导航和无人机飞行等领域具有广泛的应用。
粒子群算法(Particle Swarm Optimization, PSO)是一种模拟鸟群觅食行为的优化算法,被广泛应用于路径规划问题的求解。
本文将基于粒子群算法对路径规划进行优化研究,旨在提高路径规划的效率和准确性。
1. 引言路径规划问题可以描述为在给定环境下,找到一条从起点到终点的最优路径,使得路径的长度最短或者到达终点所需时间最短。
路径规划在现实生活中有着广泛的应用,如物流配送、交通导航和智能机器人等。
由于路径规划问题的复杂性,传统的算法难以快速准确地求解,因此需要借助优化算法进行解决。
2. 粒子群算法原理粒子群算法是一种基于群体智能的优化算法,受到鸟群觅食行为的启发而提出。
算法的基本原理是通过模拟鸟群中个体的协作行为,在搜索空间中寻找最优解。
每个个体被称为粒子,它们通过跟随当前群体中最优解的轨迹,来更新自己的位置和速度。
在路径规划中,将每个粒子对应到一条路径,并通过不断迭代来优化路径的长度或时间。
3. 路径规划优化模型为了对路径规划进行优化,需要定义适当的优化模型。
以路径长度最短为目标,路径规划问题可以描述为一个多维度的优化问题。
假设有N个粒子,每个粒子对应一个候选路径,路径上的每个点都有对应的位置和速度信息。
优化模型的目标是找到最优的路径集合,使得路径的长度最短。
4. 路径规划优化过程基于粒子群算法的路径规划优化过程可以分为初始化、目标函数计算、速度更新和位置更新四个步骤。
4.1 初始化在算法开始之前,需要初始化粒子群的位置和速度。
将每个粒子的位置初始化为起点,并随机生成速度向量。
4.2 目标函数计算根据路径长度作为目标函数,计算每个粒子对应路径的长度。
通过计算每个粒子的适应度值,可以评估候选路径的优劣程度。
4.3 速度更新根据当前粒子的最优位置、全局最优位置和经验因子来更新粒子的速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Do ub l e ・ - I mp ul s i v e Fl y - ・ Ar o u n d Pr o bl e m Ba s e d o n Pa r t i c l e
( 1 . 北 京控 制工 程研 究所 , 北京 1 0 0 1 9 0 ; 2 . 空 问智 能控 制
摘 要 :以 H i l l 方 程 为 基 础 对 圆轨 道 近 距 离 双 脉 冲 绕 飞 优 化 问题 进 行 研 究 . 首 先 给 出 双 脉 冲 绕 飞
2 . S c i e n c e a n d T e c h n o l o g y o n S p a c e I n t e l l i g e n t C o n t r o l L a b o r a t o r y,B e o ' i n g 1 0 0 1 9 0,C h i n a )
t h e de s i g ne d p a r t i c l e s wa r m o pt i mi z a t i o n a l g o r i t h m i s e x a mi n e d t o b e e f f e c t i v e b y t h e s i mu l a t i o n s o f s ue — c e s s f u l a n d s a f e f l y — a r o u n d mi s s i o n b e t we e n — V— b a r a n d + V— b a r. + R- ba r a s we l l a s +H — b a r . Th e r e — s u i t s a r e c o ns i s t e nt wi t h t h e t r a di t i o n a l o p t i mi z a t i o n a l g o r i t h m ,whi c h p r o v e s t he v a l i d i t y o f t h e PS O.
b l e s wh i c h n e e d t o b e o p t i mi z e d a r e a n a l y z e d .T he a r t i c l e p r o p o s e s a p e r f o r ma n c e i n d e x f u nc t i o n
S wa r m Op t i mi z a t i o n Al g o r i t h m
L I ANG J i n g j i n g ,XI E Y o n g c h u n ’
( . B e i j i n g I n s t i t u t e o f C o n t r o l E n g i n e e r i n g , B e i j i n g 1 0 0 1 9 0 ,C h i n a ;
f l y — a r o u nd pr o c e s s . At f i r s t ,t h e o p t i mi z a t i o n mo d e l o f d o u b l e — i mp u l s i v e l f y. a r o u nd i s g i v e n a nd t h e v a r i a —
第3 9卷
第 5期
空 间控制 技术 与应 用
Ae r o s p a c e Co n t r o l a n d Ap p l i c a t i o n ・43 ・
2 0 1 3年 1 0月
基 于粒 子 群 算 法 优 化 双 脉 冲 绕 飞 问题 木
梁 静 静 , 解 永 春
+R — b a r 、 +H — b a r 的 绕 飞 进 行 仿 真 获 得 燃 耗 和 时 间加 权 最 优 的 安 全 绕 飞 轨 迹 , 与 遍 历 寻 优 结 果 一 致, 由 此 验 证 了粒 子 群 优 化 算 法 的 有 效 性 . 关 键 词 :绕 飞 ;粒 子 群 算 法 ; 多 目标 优 化 中 图 分 类 号 :V 4 4 8 . 2 3 文 献标 识码 : A 文 章 编 号 :1 6 7 4 . 1 5 7 9 ( 2 0 1 3 ) 0 5 - 0 0 4 3 - 0 5
s t r a i n t o f t r a j e c t o r y s a f e t y .I n a d d i t i o n,t h e p a r t i c l e s wa r m o p t i mi z a t i o n a l g o r i t h m i s d e s i g n e d .F i n a l l y ,
Ab s t r a c t : Ba s e d o n t h e Hi l l e q u a t i o n, t h e a r t i c l e s t u di e s t h e o p t i mi z a t i o n p r o b l e m o f d o u b l e — i mp ul s i v e
,
wh i c h
i s t he we i g h t e d s u m be t we e n t h e t i me a n d t he c o n s u mp t i o n o f t h e f u e l ,a s we l l a s c o n s i de r i n g t h e c o n —
的优化 模 型并推 导分析得 出待优 化 的 变量 , 同时构 造 了燃 耗 和 时 间加 权 的 性 能指 标 函数 并考 虑 安 全 约束 , 然后 设 计 了粒 子 群 优 化 算 法 对 绕 飞 过 程 进 行 优 化 , 最 后 通 过 对 一V . b a r到 +V — b a r 、