RV减速器扭转刚度特性分析
RV减速器传动系统动力学分析与试验研究

RV减速器传动系统动力学分析与试验研究张圆东肖正明吴利荣(昆明理工大学机电工程学院)摘要以RV320E减速器为研究对象,利用集中参数法对系统建立扭转动力学方程,在建立模型过程中考虑第1级减速器齿轮时变啮合刚度等因素的影响,运用数值方法求解振动传动系统的固有特性和动态响应,并通过试验方法与理论值进行比较,验证模型的正确性"试验结果表明:动力学模型仿真结果与理论数据吻合良好,并且建立的模型精细化程度高,为传动系统的结构设计、故障诊断与动力学优化奠定基础。
关键词RV减速器扭转动力学方程固有特性中图分类号TH132.46文献标识码A符号说明!——单齿变形区的宽度,!=12mm;"gm——摆线轮1与曲柄轴阻尼系数;"'25——摆线轮2与曲柄轴阻尼系数;——摆线轮1与太阳轮阻尼系数;"&'2+—摆线轮2与太阳轮阻尼系数;"pg——行星轮1与曲柄轴阻尼系数;"h-2®——行星轮2与曲柄轴阻尼系数;"h-3®——行星轮3与曲柄轴阻尼系数;——行星轮与太阳轮阻尼系数;",+——输入轴与太阳轮阻尼系数;"——输出轴阻尼系数;——曲柄轴与摆线轮啮合处的阻尼系数;E——摆线轮与针齿的弹性模量,本项目RV减速器为RV320E,针齿和摆线轮的材料一样,均为GCr15"故E=2.06x105MPa;%i——输入端等价啮合力;%——摆线轮与针齿的啮合力;F%'——摆线轮在特定位置的最大啮合力;%——输出端等价啮合力;——平均啮合刚度;——齿轮刚度谐波项;'(()——时变啮合刚度;----摆线轮单齿啮合刚度;----双齿啮合刚度;动态响应文章编号(000".?.:%:"!])0(-0040-09 'm2-----单齿啮合刚度;K----啮合刚度;——短幅系数;K(()——系统时变啮合刚度;Kb'g——摆线轮1与曲柄轴刚度系数;K bx2qj——摆线轮2与曲柄轴刚度系数;Kg——摆线轮1与太阳轮刚度系数;)'2+——摆线轮2与太阳轮刚度系数;K hp1——行星轮1刚度系数;K,p2——行星轮2刚度系数;K,P3——行星轮3刚度系数;K hp1qj——行星轮1与曲柄轴刚度系数;K hp2)i——行星轮2与曲柄轴刚度系数;K hp3qj——行星轮3与曲柄轴刚度系数;Kh-qj——行星轮与曲柄轴刚度系数;K hps——行星轮与太阳轮刚度系数;K,+——输入轴与太阳轮刚度系数;K/=——摆线轮与针齿时变啮合刚度;K——输出轴刚度系数;Kqj&'——曲柄轴与摆线轮啮合处的刚度系数;*----中心距;+----啮合轮齿个数的最大值;,----质量矩阵;----输入端的当量质量;——摆线轮1的当量质量;!b%2——摆线轮2的当量质量;!hpL—行星轮1的当量质量;!hp2——行星轮2的当量质量;—!行星轮3的当量质量;!*一一输出端的当量质量;—太阳轮的当量质量;"—一啮合轮齿个数;n——啮合轮齿个数的最小值;#——啮合总个数;$c------—摆线轮的有效半径;厂hp―一行星轮的有效半径#$hp=5mm;%——啮合线长度;&-—摆线轮上的位移;'—!啮合时间;T——添加在摆线轮上的扭矩;)—一振动加速度;咒#—一输入轴振动加速度;兀b%#—!摆线轮1的振动加速度;兀b%2—!摆线轮2的振动加速度;兀h p1—!行星轮1的振动加速度;兀h p2—!行星轮2的振动加速度;兀h p3—!行星轮3的振动加速度;)*!输出轴振动加速度;兀+—!太阳轮的振动加速度;*—!振动位移;^bxlqj—摆线轮1与曲柄轴相对振动位移;*bx2qj—摆线轮2与曲柄轴相对振动位移;*hp1一—行星轮1振动位移;*hp2一!行星轮2振动位移;*hp3一!行星轮3振动位移;^hplqj!行星轮1与曲柄轴相对振动位移;*hp2qj!行星轮2与曲柄轴相对振动位移;*hp3qj!行星轮3与曲柄轴相对振动位移;—hp+!行星轮与太阳轮相对振动位移;X*——!输出轴振动位移;*+—!太阳轮振动位移;+p—一啮合齿宽;!----!角速度;——第,阶固有圆频率;"—齿轮刚度谐波相位;#——重合度;$---摆线轮的泊松比,“=0.3;%町一摆线轮的接触变形(最大应力处);!(&),—单齿啮合间隙;&——摆线轮与针齿啮合间隙;'---初始相位角;(—啮合角;----各构件相应的第,阶振型矢量。
RV减速器的动态特性分析
RV减速器的动态特性分析RV减速器是一种广泛应用于机械传动领域的重要装置,具有体积小、传动精度高、承载能力大等优点。
因此,深入了解RV减速器的动态特性对于优化设计和使用RV减速器具有重要意义。
本文将对RV减速器的动态特性进行分析,并探讨其对传动性能的影响。
1. RV减速器的基本结构与工作原理RV减速器由减速机壳、输入轴、输出轴、传动系数装置等组成。
其中,传动系数装置是核心部件,通过内、外齿轮的啮合来实现传动。
RV减速器的工作原理是:输入轴带动传动系数装置旋转,传动系数装置通过内、外齿轮的啮合,将输入轴的旋转方向逆时针转变为输出轴的旋转方向。
传动系数装置采用的齿轮传动结构使得RV减速器具有高传动精度和承载能力大的特点。
2. RV减速器的动态特性2.1 齿轮传动系统的动力学特性齿轮传动系统具有复杂的动力学特性,主要表现为齿轮啮合刚度、齿轮副非线性和传动误差等。
其中,齿轮啮合刚度是齿轮传动系统的重要性能指标,表示齿轮副在加载下的刚度表现。
齿轮啮合刚度的大小直接影响着RV减速器的传动精度和承载能力。
2.2 振动特性齿轮传动系统在运动过程中会产生振动,振动频率和振幅是评估RV减速器动态特性的重要参数。
振动特性与齿轮装配质量、齿轮设计参数等有关。
振动会导致齿轮传动系统的噪声和动态响应不稳定,因此减小振动对于提升RV减速器的性能至关重要。
2.3 动态齿向传递误差动态齿向传递误差是由于齿轮啮合时产生的非理想运动引起的。
RV减速器的动态齿向传递误差会影响到输出轴的运动精度。
因此,分析和控制动态齿向传递误差对于优化RV减速器性能具有重要意义。
3. RV减速器动态特性对传动性能的影响3.1 传动精度RV减速器的动态特性直接影响着传动精度。
高齿轮啮合刚度和减小振动能够提高传动精度,使得输出轴的运动更加稳定和精准。
3.2 承载能力动态齿向传递误差对于RV减速器的承载能力具有重要影响。
减小动态齿向传递误差可以减小齿轮与轴承的载荷不均匀分布,提升承载能力,延长RV减速器的使用寿命。
RV减速器传动系统动力学特性分析

机械设计与制造Machinery Design & Manufacture 147第1期2021年1月RV 减速器传动系统动力学特性分析庞杰,韩振南(太原理工大学机械工程学院,山西太原030024)摘要:为深入研究工业机器人用RV 减速器动力学特性,采用集中参数法,综合考虑啮合阻尼、时变啮合刚度以及综合啮合误差,建立了 RV 传动耦合扭转动力学模型,通过数值解法对建立的动力学方程进行求解,得到其振动位移、振动角 速度响应及各齿轮副动态啮合力。
基于UG 与ADAMS 建立RV 减速器动力学模型,进行仿真分析实验,验证动力学模型的正确性。
通过改变啮合刚度分析了啮合力的变化,随着啮合刚度的增加,在一定范围内,传动过程中的啮合力更加稳定,为RV 减速器的故障诊断和优化设计奠定基础。
关键词:RV 减速器;时变啮合刚度;传动误差;动态响应中图分类号:TH16;TH132.41文献标识码:A文章编号:1001-3997(2021 )01-0147-05Dynamics Characteristic Analysis of RV Reducer Transmission SystemPANG Jie, HAN Zhen-nan(College of Mechanical Engineering, Taiyuan University of Technology , Shanxi Taiyuan 030024, China)Abstract :7ti order to study the dynamic characteristics of RV reducer for industrial robots,a coupling torsional dynamicsmodel o/*RV reducer transmission system is built by using lumped-parameter method. Cons i de ring the meshing damping, thetime varying meshing stiffness and the comprehensive meshing error, the numerical method is used to simulate the dynamics peiformance ofRV reducer ,and the vibration displacement, vibration angular velocity response and dynamic meshing f arce ofeach gear pair are obtained..Creating the dynamic model of RV reducer with UG and ADAMS , the simulation analysisexperiment was carried out to verify the correctness of the dynamic model. The change of meshing force is analyzed by changing meshing stiffness. With the increase of mesh stiffness , the meshing f orce in the transmission process is more stable within a certain range.The research results can lay a good theoretical f oundation f or f ault diagnosis and optimization design f or RV reducer.Key Words : RV Reducer ; Time-varying Meshing Stiffness ; Transmission Error ; Dynamic Response1引言自20世纪80年代以来,学者们对RV 传动的研究有了很 大的进展凹,主要以RV 传动精度及动态性能为主。
RV减速器测试方法标准及试验研究

0 引言 现有高 精 密 减 速 器 主 要 有 三 种 类 型,分 别 是
RV减速器、摆线针轮减速器和谐波减速器。其中, RV减速器较其它减速器在传动精度、旋转效率、扭 矩刚度、使用寿命方面更具优势,在高精密传动领域 应用最为广泛,具有较高的性价比。对 RV减速器 来说,其运动精度包括定位精度和传动精度,回程误 差和传动误差是其主要的对应评价指标。通常,RV 减速器出厂时,回程误差的技术指标要求必须控制 在不大于 15角分,传动误差的技术指标要求控制 在不大于 1角分。[1]作为 RV减速器的使用单位,工
要求。
现有 RV减速器测试方案 (传动误差、旋转效
率、回程误差 和 扭 转 刚 度 等 测 试 方 案 )主 要 有 三 种
情况,分别是:
(1)运用 传 统 仪 器 进 行 测 试 实 验,采 用 人 工 记
录和处理数据。该方案的不足是工作量大、效率低、
精度差。
(2)多种专业仪器组合,利用计算机数据采集、
图 2 试验装置组成图
试验前,应先将待检测的 RV减速器安装到试 验平台上。使用联轴器连接原动机的输出轴和 RV 减速器的输入轴和测量主轴,在 RV减速器输出部 分使用联轴器连接 RV减速器输出轴以及转矩转速 测量仪的输入轴,并连接圆光栅和制动加载器,然后 调整各个组件的相对位置,保证各轴同轴且无互相
RV减速器的传动误差和旋转效率可通过设定 原动机旋转速率和制动加载器参数,带动被测 RV 减速器均 匀 稳 定 的 旋 转。 旋 转 一 周 内,RV减 速 器 输入端和输出端的旋转角度通过圆光栅进行实时测 量。当输入轴转动一定角度,此时输出轴与输入轴 实际转角的角度差值为传动误差,即传动精度。旋 转效率的试验可结合转矩转速测量仪的实时输出, 计算 RV减速器输入端和输出端各自的实时效率, 获得被测 RV减速器的旋转效率。 3 RV减速器试验结果
RV减速器的动态特性理论分析解读
RV减速器的动态特性理论分析机器人用RV传动是在摆线针轮传动基础上发展起来的一种新型传动,它具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点,因而受到国内外的广泛重视。
随着对高速、重载、轻量化和运转平稳要求的增加,减少疲劳破坏和减小振动噪声等已经成为机械设计中的重要因素,因此动力学特性已经成为机械设计中不可或缺的一个重要环节。
由于RV减速器尚处于研究阶段,其设计与制造的理论依据并不完善成熟,因此对其动力学特性进行系统的理论研究及实验是十分必要的。
论文作为高等学校博士学科点专项科研基金资助课题、辽宁省高等学校优秀人才支持计划和新世纪优秀人才支持计划的一部分,在已有的关于摆线针轮行星传动研究的基础上,围绕RV 减速器的动态特性分析这一专题,完成了一下主要工作:用集中质量法建立了RV 传动系统的整机动力学模型,根据渐开线传动和摆线传动两级传动中各个构件的不同特性,在考虑转臂轴承的刚度以及曲柄轴与摆线轮的转动周向夹角的周期性变化对系统影响的前提下,基于牛顿第二定律和广义坐标法建立了具有25个自由度的弹性动力学方程,并求解出系统的固有频率和各阶振型。
采用pro/e软件建立了RV减速器的三维实体模型,将模型导入至ansys有限元分析软件中,分别求解出摆线轮和渐开线齿轮的固有频率和振型,对其频率分布规律进行了分析。
本文建立了摆线啮合传动中曲柄轴和渐开线传动中输入轴的连续系统动力学模型,用偏微分方程描述其运动,结合其边界条件得到了零件的固有频率精确解,分析得到分布规律。
同主题文章[1].罗善明,郭迎福,余以道,诸世敏. 磁力金属带传动的动力学模型及其振动特性研究' [J]. 湖南科技大学学报(自然科学版). 2005.(04)[2].刘继岩,孙涛,戚厚军. RV减速器的动力学模型与固有频率研究' [J]. 中国机械工程. 1999.(04)[3].陈永校,诸自强. 电机定子的固有频率及其模态的实验研究' [J]. 大电机技术. 1986.(02)[4].虞培清,王则胜. 摆线轮跨齿测量数值计算方法' [J]. 现代制造工程. 2005.(02)[5].于兰峰,王金诺. 塔式起重机动态分析的计算模型' [J]. 机械设计与研究. 2006.(05)[6].鞠尔男,何卫东,李力行. 四环板式针摆行星传动减速器的热功率分析'[J]. 大连铁道学院学报. 2005.(01)[7].范金锐,张建国. 弹性连杆机构固有频率计算的新方法' [J]. 天津科技大学学报. 1988.(02)[8].章焕文. 用有限元法预估框架固有频率' [J]. 航空精密制造技术. 1995.(06)[9].吉爱国,冯汝鹏,郭伟,张锦江. 动力学模型在重型机械手控制中的应用' [J]. 制造业自动化. 1996.(04)[10].何卫东,李欣,李力行. 双曲柄环板式针摆行星传动的研究' [J]. 机械工程学报. 2000.(05)【关键词相关文档搜索】:机械设计及理论; 针摆行星传动; 动力学模型; 固有频率; 集中参数【作者相关信息搜索】:大连交通大学;机械设计及理论;何卫东;肖君君;。
RV减速器传动精度分析研究
102研究与探索Research and Exploration ·工艺与技术中国设备工程 2018.04 (下)1 RV 减速器及其发展过程1.1 RV 减速器的特点和原理RV(Rotate Vector)减速器是一种二级封闭式的、少齿差行星传动机构,其是以摆线针轮传动为基础,在工业机器人关节、自动化设备以及数控机床等诸多方面都有重要的应用。
其具较大的传动比以及扭转刚度、很高的运动精度和传动效率,以及较小的回差和体积等特点,也正因如此,众多的研究学者和机构将其作为研究的重点。
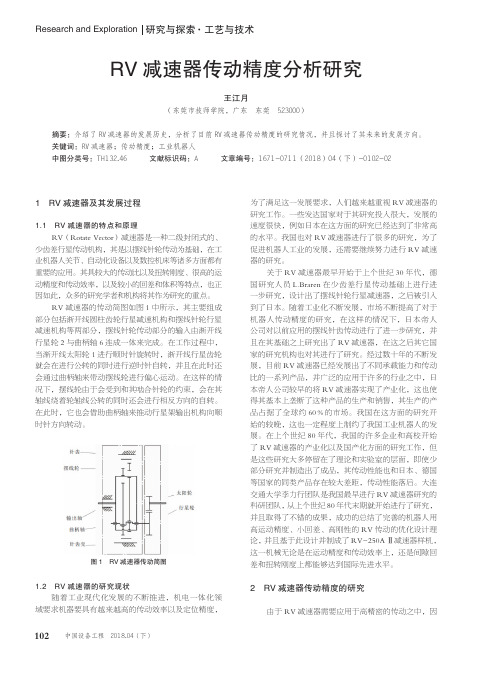
RV 减速器的传动简图如图1中所示,其主要组成部分包括渐开线圆柱齿轮行星减速机构和摆线针轮行星减速机构等两部分,摆线针轮传动部分的输入由渐开线行星轮2与曲柄轴6连成一体来完成。
在工作过程中,当渐开线太阳轮1进行顺时针旋转时,渐开线行星齿轮就会在进行公转的同时进行逆时针自转,并且在此时还会通过曲柄轴来带动摆线轮进行偏心运动。
在这样的情况下,摆线轮由于会受到和其啮合针轮的约束,会在其轴线绕着轮轴线公转的同时还会进行相反方向的自转。
在此时,它也会借助曲柄轴来推动行星架输出机构向顺时针方向转动。
图1 RV 减速器传动简图1.2 RV 减速器的研究现状随着工业现代化发展的不断推进,机电一体化领域要求机器要具有越来越高的传动效率以及定位精度,为了满足这一发展要求,人们越来越重视RV 减速器的研究工作。
一些发达国家对于其研究投入很大,发展的速度很快,例如日本在这方面的研究已经达到了非常高的水平。
我国也对RV 减速器进行了很多的研究,为了促进机器人工业的发展,还需要继续努力进行RV 减速器的研究。
关于RV 减速器最早开始于上个世纪30年代,德国研究人员L.Braren 在少齿差行星传动基础上进行进一步研究,设计出了摆线针轮行星减速器,之后被引入到了日本。
随着工业化不断发展,市场不断提高了对于机器人传动精度的研究,在这样的情况下,日本帝人公司对以前应用的摆线针齿传动进行了进一步研究,并且在其基础之上研究出了RV 减速器,在这之后其它国家的研究机构也对其进行了研究。
RV减速器传动精度及固有特性研究
RV减速器传动精度及固有特性研究工业是一个国家发展的重要基础,随着科技的进步与发展,工业机器人在工业生产制造领域中的应用越来越广,工业机器人的应用能够有效地提高工业生产的效率及质量.相较于国外工业机器人的发展,我国工业机器人起步较晚,对于工业机器人中的一些核心部件都需要进口.随着智能化和数字化的到来,工业机器人已经逐渐应用于国家发展的各个领域.减速器是影响工业机器人质量和水平的重要部件,也标志着一个国家的工业发展水平.精密齿轮RV系列是机床、工厂机器人、装配设备、输送机等需要精密定位、高刚度、高冲击负荷能力的相关领域精密机械控制的理想减速器.2 RV减速器的结构RV减速器是由行星齿轮传动和行星摆线传动组成的两级减速传动机构,由于其由中心圆盘支撑的封闭、超静定和组合行星传动机构,具有传动比大、体积小、刚度大、承载能力大、传动效率高和传动精度高等突出优点,广泛应用于工业机器人关节驱动装置中,它的结构简图如下图2-1所示.RV减速器的摆线齿轮以相反的方向绕其自身轴线转动输入旋转的角度,因为轴具有一体化结构.摆线减速器包含由销或行星齿轮组成的内齿轮,对减速器系统产生双速减速效果,最近已在机器人中流行起来.这是因为它们可以产生比相同尺寸的普通摆线减速器更大的减速率,普通摆線减速器通过将摆线齿轮运动直接平移通过输入偏心轴来减速.RV减速器的结构基于其传动原理和结构特点,包括摆线齿轮、销齿轮箱、销齿轮、曲轴和轴承孔等部件.为了提高装配精度,必须进行高精度加工,因此RV减速器通常成本和销售价格都很高.下面RV减速器的主要零部件进行说明:2.1 输入齿轮轴在摆线针轮减速器的理想设计中,输入齿轮的齿形可以与风轮上的所有销齿接触,其中一半的销齿参与载荷传递.同时,摆线齿轮上的输出孔可以与输出盘上的所有销保持接触,并且输出销的一半传递负载.2.2 渐开线行星轮行星轮以齿轮轴为中心互成120°对称安装,与输入齿轮轴相啮合,输入齿轮轴转动带动三个行星轮以同样的速度转动,通过梯形键与曲柄轴固联,带动曲柄轴一起转动,进而完成RV减速器的第一级减速任务.复合行星齿轮的装配条件比简单的行星齿轮更严格,而且它们必须以相对正确的初始方向装配,否则它们的齿不能同时与行星两端的太阳轮和环形齿轮啮合,复合行星齿轮能以相同或更小的体积容易获得更大的传动比.2.3 曲柄轴三个曲柄轴分别通过梯形键与三个行星轮相对应联接固定在一起,在进行转速求解时将两者看成一个整体,通过安装在曲柄轴偏心部分上的圆柱滚子轴承,将动力传递给摆线轮,作为RV 减速器第二级减速的输入部分.2.4 摆线轮两摆线轮对称分布,相位差180°,与曲柄轴通过圆柱滚子轴承相接触,绕输入齿轮轴轴线做偏心转动,在输入扭矩的作用下,零件的运动方向为角正方向,等效位移的正方向为每个零件的运动方向.2.5 行星架以轴线为中心,行星架和输出盘成120°对称分布,曲柄轴通过圆锥滚子轴承与行星架相联接,行星架为行星轮和曲柄轴的转动起支撑作用,同时随曲柄轴绕输入齿轮轴轴线做公转转动.2.6 输出盘输出盘与第一级的固定环形齿轮的壳体滚子接触,并且能够围绕其自身的轴自由旋转.中心圆盘沿与输入轴相反的方向旋转,可以围绕轴轴线自由旋转,输出盘不动,壳体反过来提供输出动力进行输出,实现RV减速器二级减速.2.7 壳体壳体的作用是承载各零部件,此外还可作为输出端:当输出盘与行星架固定式时,壳体则作为输出机构进行输出转动,进而完成RV减速器目标二级减速任务.3 RV传动原理及其特点3.1 RV减速器的传动原理RV减速器传动过程首先通过输入齿轮轴输入动力,与一级渐开线行星轮的啮合传动来实现第一次减速;行星轮在曲柄轴上固定,从而带动曲柄轴绕中心轮公转,同时进行自转带动摆线轮;摆线轮与针齿轮做啮合转动时,通过反馈带动曲柄轴将传动行星架和输入盘.随着摆线盘的旋转,与组件的其它减速部件发生两个接触点.首先,盘的外表面相对于环形齿轮箱的辊子滑动,其次,盘的旋转运动与低速轴的辊子相互作用.摆线盘本身以与高速轴相反的方向旋转,同时,盘的外边缘上的凸起逐渐与连接到环形齿轮箱内周的辊子接合.这种相互作用以降低的速度产生反向旋转.对于高速轴的每一次完整旋转,摆线盘以相反的方向旋转一个摆线齿长.通常,圆盘周围的摆线齿比固定环形齿轮壳体中的销少一个,导致实际减速比等于圆盘上摆线齿数,摆线盘的减小的旋转通过与盘内包含的孔接合的驱动销和辊传递到低速轴.随着同时承受接触和传递载荷的滚子(齿)数量的增加,最大应力值减小,提供了更大的扭矩传递能力,并提供了异常平稳、无振动的驱动,这种系统通常包括两个圆盘和一个双偏心凸轮.对于具有相应较小扭矩容量的较小单元尺寸,可以使用由单个偏心凸轮驱动的单个盘系统.壳体固定的情况下,输入齿轮轴(1)提供动力,通过输出盘-6输出动力,假如齿轮轴(1)顺时针转动,行星轮(2)与曲柄轴(3)为整体,一边绕输入齿轮轴(4)的轴线公转,同时以逆时针方向自转完成高速段第一次减速,主减速器一是改变动力传动的方向,二是作为传动的延伸,为每个齿轮提供共同的传动比.曲柄轴(3)的转动作为二级减速的转动输入,曲柄轴(3)与摆线轮(4)接触后将动力传递给摆线轮(4),之后摆线轮与针齿轮(5)做内啮合式的滚动摩擦反馈给曲柄轴(3),带动曲柄轴(3)一起绕输入齿轮轴(1)的轴线做以顺时针为方向的公转完成二级减速;曲柄轴(3)分别与行星架(7)和输出盘(5)相接,曲柄轴绕输入齿轮轴(1)的做以顺时针为方向公转的同时,行星架(7)和输出盘(6)也随曲柄轴一起做绕输入齿轮轴(1)的轴线的顺时针转动作为最终输出转速,输出转速与输入转速的比值即为RV减速器传动比.RV减速器的传动简图如图3-1所示.3.2 RV减速器的传动特点RV减速器采用两级摆线设计,具有高传动比、高扭矩和强的冲击负荷能力,采用滚动接触元件,减少磨损,延长使用寿命.同时,RV减速器由于独特的针齿结构的摆线设计,具有低齿隙的特点,与传统减速器相比,具有更高的精度和抗冲击性.RV减速器由大的内部角支撑轴承组成,这些轴承提供大的力矩能力,并且不需要外部支撑装置.RV减速器由于集成角支承轴承,具有刚度高、承受外力矩能力强、无需外力支承的特点,不仅减少了零部件数量,而且节省了成本,也增加了操作的可靠性.摆线轮和针轮啮合力的影响程度由大到小依次为摆线轮齿数、短振幅系数和针齿中心半径,针齿半径相对较小.在RV减速器传动中,核心传动部分为摆线针轮传动,而核心传动部分为摆线针轮传动,其精度直接影响RV减速器的传动精度、稳定性乃至整体性能.减速器的摆线针齿是100%的连续接触,保证极低的侧隙和高的冲击负荷能力,由于两个摆线齿轮的低速旋转,两级减速机构能够减小振动,同时由于减小了输入耦合尺寸而减小了惯性.RV减速器也有各种各样的比率,可以通过在第一阶段的直齿轮组合得到,在整RV减速器中使用滚动接触部件有助于出色的启动效率、低侧隙、低磨损和长的使用寿命.传动误差反映了输入轴和输出轴之间的角传动精度,当输入齿轮固定时,指定扭矩沿两个方向施加到输出轴上,并且测量弹性.在零负载(死点)时,滞回区上下边界映射之间的距离-φ最大为1弧分钟.机器人RV减速器还提供了多齿啮合,同时,平衡双圆盘结构的偏置振动、高重叠系数以及具有适当间隙的滚子接触,以避免齿轮干涉,从而有效降低噪音和振动.RV减速器采用滚动接触元件设计独特的针摆线轮齿,有利于减少磨损,减小间隙,使其比传统减速机具有更强的抗沖击性能,并进一步减小间隙.RV减速器具有承载大的内部轴承,以实现更大的承载能力,从而降低外部支撑设备的要求,从而减少设计时间和安装成本.真正的对称齿轮设计,以及所有的轴滚珠轴承支撑,保证了恒定性能的使用周期,并允许在短时间内达到额定峰值扭矩的5倍.4 RV减速器传动精度的分析与控制RV减速器以精密运动控制专用的平板为中心的减速器,具有结构紧凑、重量轻、刚度高等特点,其强度足以抵抗过载情况.此外,自由间隙、微转动振动和低惯量的优点保证了快速加速度、超精密定位和平滑运动.在理论上,RV减速器摆线盘的所有齿都与环形齿轮的相应滚子接触,其中一半传递载荷.然而,实际情况并非如此,因为环形齿轮的滚子和摆线盘的齿之间存在一定的间隙,以便补偿摆线盘制造过程中产生的误差,为润滑提供更好的条件,实现减速器的更容易组装和拆卸等等.这些间隙的大小直接影响摆线盘齿和齿圈辊之间接触时出现的接触力的分布,意味着随着间隙尺寸的增加,传递载荷的相应元件的数量正在减少.摆线盘与齿圈和输出辊接触,接触力的值取决于间隙的大小,即传递载荷的摆线盘齿(环形齿轮的滚子)的数量.第一级行星齿轮由输入轴、中心论、行星轮等部分构成.摆线针轮传动由曲柄轴、摆线轮、针轮等部分构成.RV减速器的偏心轴与输出轴连接,保证了偏心轴与针齿壳同步转动,其输出轴和输入轴是一条直线,结构得到了加强,节省了空间,因此在相同的齿轮减速器和蜗杆减速器减速比下,RV减速器尺寸更加紧凑.RV减速器二级减速的摆线针轮减速部分输出速度就是RV减速器经过减速所最后输出的速度,机器人专用RV减速器对驱动精度、承载能力要求很高.齿隙是影响精度的重要指标之一.RV减速器设计中必须严格控制齿隙.齿隙会导致输出轴和输入轴之间在短时间内失去轨迹.将产生输出中断.RV减速器传动过程中存在输出损耗.运动传递关系变得非线性.此外,齿隙也会影响反馈控制系统和动态品质.因此,RV减速器的齿隙必须要严格的控制,才能保证减速器的正常动力传动要求.目前机器人可使用的许多类型的减速器中,通常都使用平面齿轮减速器和谐波驱动器.摆线减速器(RV减速器)是当今使用的最常见类型的平心齿轮减速器.摆线传动从20世纪30年代到现在一直是受欢迎的减速器,因为与行星齿轮系相比,它体积小、重量轻、速度快,并且在单个阶段具有很高的机械优势.然而,由于加工过程中的变化,摆线驱动器中存在齿隙,将降低稳定性以及固有噪声和振动,特别是在高速时.大多数用于自动化制造的机器人都使用谐波驱动器来驱动上两个机器人或者三个接头和摆线减速器.在全尺寸机器人中,摆线减速器用于所有六个关节.谐波减速器和摆线减速器即使在一个阶段也能表现出显著的减速比,并且由于它们的齿数比很大,即使在小尺寸时也能传递大扭矩;因此,它们主要用于需要紧凑结构、大负载能力和高精度位置控制的机器人.这些减速器越来越专门用于测量齿形制造技术和装配技能等应用.随着半导体制造和航天工业等领域对高功能的需求不断增加,从满足用户需求的角度来看,摆线和谐波减速器有望继续发展.5 结语随着制造自动化,机器人越来越多地从事人类工作.因此,使用精密减速器对于实现机器人手臂位置的精确控制变得至关重要.曲线齿廓,如摆线或渐开线齿廓,通常用于精密减速器,RV减速器能够实现高精度控制,广泛用于操纵机器人系统.本文在分析RV减速器结构的基础上对RV减速器传动特性,传动精度进行简要介绍,以供参考.。
RV减速器扭转刚度特性分析
表 2 减速器摆线行星传动机构基本参数
Tab.2 Fundamental parameters of cycloidal planetary
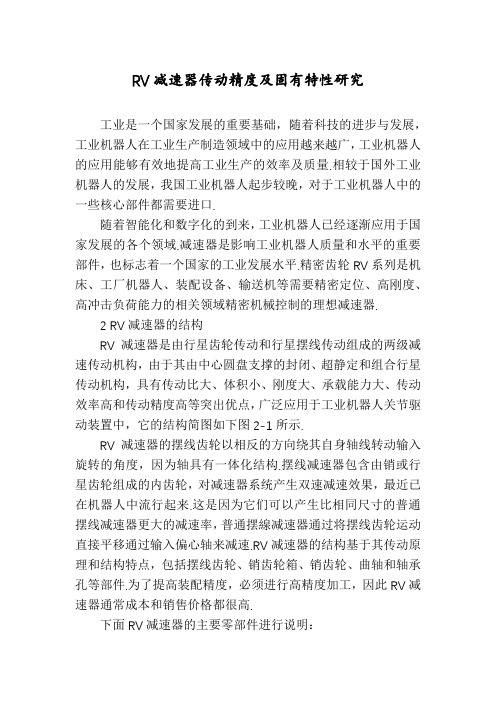
高速级为渐开线齿轮组成的 K-H 型差动轮系, 由中心轮 1、径向均匀分布的 3 个行星轮 2 及系杆 7 组成;低速级为摆线齿轮组成的 K-H-V 型行星轮系, 由径向均匀分布的 3 个曲柄轴 3、2 个对称布置的摆 线轮 4 与 4′ 、若干针齿 5 以及输出盘 6 组成.该轮系 中系杆 7 与输出盘 6 固连为同一构件.
⎧
⎪ ⎪
Ft
=
Tzc 3mi(z12 / z2
+
z1 )
⎪⎪ ⎨
Fx
⎪
=
Fx′
=
Tz2 zp 6iz1K1rp
(1)
⎪
⎪ ⎪⎩
Fy
=
Fy′
=
K yTz2 zp 6iz1K1rp
Ky
=
2 π
⎛ ⎜ ⎝
1 K1
+
K12 −1 2K12
ln
1 1
+ −
K1 K1
⎞ ⎟ ⎠
式中:K1 为短幅系数,K1 = azp / rp ;T 为输出盘额定 负载扭矩,N ⋅ mm ;i 为减速器传动比.
选取表 1 和表 2 数据(额定负载扭矩为 3.136 ,MN·mm)构建减速器几何模型,建模中忽略 各零部件上的倒角、螺纹孔等对刚度影响不大的局部 细小结构,假定将针齿视为与针齿壳固连.在 Pro/E 环境下构建几何模型,如图 1(a)所示.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
·112·
天津大学学报(自然科学与工程技术版)
第 48 卷 第 2 期
的轴承弹性,将轴承等效为一个具有一定刚度的柔性 圆环,研究结果表明,轴承刚度是影响整机扭转刚度 的主要因素.上述研究使整机扭转刚度模型逐渐精 细,但在轴承刚度方面均以线性方式进行处理,而相 关文献指出,轴承刚度会随载荷发生非线性变化[7]; 在 RV 减速器中,不同啮合位置下各轴承受力的改变 会引起轴承刚度的变化,因此需要进一步研究这种变 化对此类减速器扭转刚度产生的影响.
⎧
⎪ ⎪
Ft
=
Tzc 3mi(z12 / z2
+
z1 )
⎪⎪ ⎨
Fx
⎪
=
Fx′
=
Tz2 zp 6iz1K1rp
(1)
⎪
⎪ ⎪⎩
Fy
=
Fy′
பைடு நூலகம்
=
K yTz2 zp 6iz1K1rp
Ky
=
2 π
⎛ ⎜ ⎝
1 K1
+
K12 −1 2K12
ln
1 1
+ −
K1 K1
⎞ ⎟ ⎠
式中:K1 为短幅系数,K1 = azp / rp ;T 为输出盘额定 负载扭矩,N ⋅ mm ;i 为减速器传动比.
选取表 1 和表 2 数据(额定负载扭矩为 3.136 ,MN·mm)构建减速器几何模型,建模中忽略 各零部件上的倒角、螺纹孔等对刚度影响不大的局部 细小结构,假定将针齿视为与针齿壳固连.在 Pro/E 环境下构建几何模型,如图 1(a)所示.
表 1 减速器渐开线行星传动机构基本参数 Tab.1 Fundamental parameters of involute planetary
杨玉虎等:RV 减速器扭转刚度特性分析
·113·
曲柄轴转角而变化,因而摆线轮与针齿的啮合刚度也 会发生变化. 2.1 轴承刚度 2.1.1 初始位置及坐标系
相关研究[7]指出,轴承刚度会随外部载荷发生非 线性变化,因此有必要对轴承进行受力分析.
设针齿 1 与摆线轮齿根啮合的位置为轮系运动 的初始位置,针齿逆时针方向依次编号 1,2,3,…, 如图 2 所示.
3 个偏置方向一致的曲柄轴,其一端分别与对应 的 3 个行星轮固连,另一端与输出盘上对应的销孔组 成转动副,中部与摆线轮构成转动副.
轮系传递运动时,行星轮带动曲柄轴转动,通过 曲柄轴将行星轮的自转传递给摆线轮实现公转,而摆 线轮又通过输出盘将其自转反馈给系杆作为差动轮 系的输入运动,从而构成封闭式行星传动.
刚度特性.
关键词:RV 减速器;扭转刚度;轴承刚度;啮合刚度;
中图分类号:TH132.414
文献标志码:A
文章编号:0493-2137(2015)02-0111-08
Analysis of the Characteristics of Torsional Stiffness of RV Reducer
由于 Fx 、Fy 与坐标轴重合且 F1 始终垂直于系杆 OOH ,故对应曲柄轴转过任意转角 θ 时,可以得到曲 柄轴分别与 2 个摆线轮铰接的转臂轴承在坐标系
Oxyz 下的合力 R 和 R′ 为
⎧⎪R = Ft,n + Fx,n + Fy,n ⎨⎪⎩R′ = Ft,n + Fx′,n + Fy′,n
大,扭转刚度特性也有所不同.因此,国内外学者针 对该类减速器刚度特性的研究仍在深入.张大卫等[3]
基于 Hertz 理论建立了摆线针轮啮合刚度模型,利用
石川公式简化了渐开线齿轮啮合刚度的计算.张迎 辉等[4]进一步考虑了摆线轮齿廓曲率的影响,避免了
单对齿啮合刚度为负的情况,使啮合刚度模型更加精 细.Park[5]针对减速器的拓扑结构特点建立了整机扭 转刚度半解析模型.Kim 等[6]在文献[5]计及轴承的
模型基础上,考虑了减速器中摆线轮与曲柄轴铰接处
收稿日期:2013-09-25;修回日期:2013-11-28. 基金项目:国家高技术研究发展计划(863 计划)资助项目(2011AA04A102). 作者简介:杨玉虎(1962— ),男,博士,教授. 通讯作者:杨玉虎,yangyuhu@. 网络出版时间:2014-02-28. 网络出版地址:http:///kcms/detail/12.1127.N.20140228.1310.003.html.
transmission mechanism of reducer
齿数
zc
zp
针齿中心圆 半径 rp/mm
针齿套外圆 半径 rrp/mm
偏心距 a/mm
39 40
114.5
5.0
2.2
1 拓扑结构与几何建模
RV 传动是由渐开线与摆线齿轮组成的二级封闭 式行星轮系,一种 RV 减速器的三维模型及其机构简 图如图 1 所示.
(2)
⎧ ⎪⎪ ⎨
Ft , n Fx,n
=Ft e j[− =Fxe j0
为建立精细的整机扭转刚度有限元模型,本文不 仅考虑了上述因素,还进一步考虑了摆线轮与针齿啮 合齿数、轴承刚度随载荷变化的非线性特征对扭转刚 度的影响规律.本研究可为该类减速器扭转刚度的 建模提供一种方法上的借鉴.
表 2 减速器摆线行星传动机构基本参数
Tab.2 Fundamental parameters of cycloidal planetary
杨玉虎,朱临宇,陈振宇,沈兆光
(天津大学机构理论与装备设计教育部重点实验室,天津 300072)
摘 要:以广泛应用于机器人关节的 RV 减速器为对象,针对其结构特点,构建了减速器整机的几何模型,以及在
ANSYS 环境下考虑轴承刚度、轮齿啮合刚度及各构件弹性的有限元模型,分析得出了对应曲柄轴自转 1 周的整机
2 整机扭转刚度建模
针对减速器的结构特点,在建模中除考虑主要构 件弹性外,还需要计及以下影响整机扭转刚度的主要 因素.
(1)轴承刚度:包括曲柄轴与摆线轮相连的转臂 轴承以及系杆与曲柄轴相连的支撑轴承的刚度.
(2)啮合刚度:包括渐开线齿轮与摆线齿轮的啮 合刚度.摆线轮同时与多个针齿啮合,其啮合齿数随
2015 年 2 月
transmission mechanism of reducer
模数 m/mm
1.5
齿数
z1
z2
15
69
变位系数
x1
x2
0.5
-0.5
(a)三维模型
(b)机构简图 1—中心轮;2—行星轮;3—曲柄轴 1;3'—曲柄轴 2; 3"—曲柄轴 3;4,4'—摆线轮;5—针齿;6—输出盘;7—系杆
图 1 RV 减速器示意 Fig.1 Schematic of RV reducer
第 48 卷 第 2 期 2015 年 2 月
DOI:10.11784/tdxbz201309096
天津大学学报(自然科学与工程技术版) Journal of Tianjin University(Science and Technology)
Vol.48 No.2 Feb. 2015
RV 减速器扭转刚度特性分析
图 3 曲柄轴受力分析 Fig.3 Schematic of force analysis of crank shaft
2.1.2 转臂轴承受力 曲柄轴及其轴承在运动过程中既承受摆线行星
传动一级的输入载荷,亦承受该级输出载荷,故为该 减速器的核心构件.假设 3 根曲柄轴均匀地承受摆 线行星传动机构的输入输出载荷,对机构进行受力分 析,得到曲柄轴上与 2 个摆线轮形成转动副的 2 个转 臂轴承的切向受力 Ft 、x 向受力 Fx 和 y 向受力 Fy [8-9] 分别为
扭转刚度的变化规律;与实验结果比较,验证了该模型的有效性与计算精度.在此基础上,应用该模型进一步分析
了摆线轮与针齿啮合齿数以及轴承刚度变化对整机扭转刚度的影响规律.结果表明:轴承刚度是影响整机扭转刚度
变化的主要因素;在分析整机扭转刚度特性时,将轴承刚度按非线性变化规律考虑时能够更精确地揭示整机的扭转
Yang Yuhu,Zhu Linyu,Chen Zhenyu,Shen Zhaoguang
(Key Laboratory of Mechanism Theory and Equipment Design of Ministry of Education, Tianjin University,Tianjin 300072,China)
扭转刚度是 RV 减速器的一项重要性能指标.针 对该类减速器刚度特性的分析与研究一直是研究热 点.目前针对单级摆线传动的刚度特性分析已较为 深入,其研究内容主要侧重于啮合刚度分析与建模研 究,考虑因素不仅涉及主要构件的弹性,同时也计及 摆线轮与针齿间不同接触位置的啮合刚度,以及多齿 接触下变形协调等复杂影响因素[1-2].RV 减速器也是 一种包含摆线传动的二级封闭式行星传动系统,其低 速级同为摆线传动,但传动结构与单级摆线区别较
高速级为渐开线齿轮组成的 K-H 型差动轮系, 由中心轮 1、径向均匀分布的 3 个行星轮 2 及系杆 7 组成;低速级为摆线齿轮组成的 K-H-V 型行星轮系, 由径向均匀分布的 3 个曲柄轴 3、2 个对称布置的摆 线轮 4 与 4′ 、若干针齿 5 以及输出盘 6 组成.该轮系 中系杆 7 与输出盘 6 固连为同一构件.
图 2 针齿编号 Fig.2 Numbers of pins
对应针齿与摆线轮任意啮合位置,以中心轮回转 中心 O 为原点,建立与曲柄轴自转运动固连的动坐 标系 Oxyz ,使 y 轴与曲柄轴偏心方向一致,z 轴与曲 柄轴线方向重合,如图 3 所示.
固定减速器输入端,在输出端施加扭矩 T 后,曲 柄轴的受力如图 3 所示.图中 OH 为曲柄轴回转中 心 ,a1 、a2 、b 、c 分 别 表 示 曲 柄 轴 相 应 轴 段 的 长 度.FH 为行星轮对曲柄轴的作用力,R1 、R2 分别为 2 个支撑轴承对曲柄轴的作用力,Ft 、Fx 、Fy 为转臂 轴承对曲柄轴的切向作用力、x 向作用力和 y 向作用 力,FH 、F1 垂直于系杆 OOH ,Fx 、Fy 分别与相应的 坐标轴重合.