Feature detection and tracking in optical flow on non-flat manifolds
目标检测综述
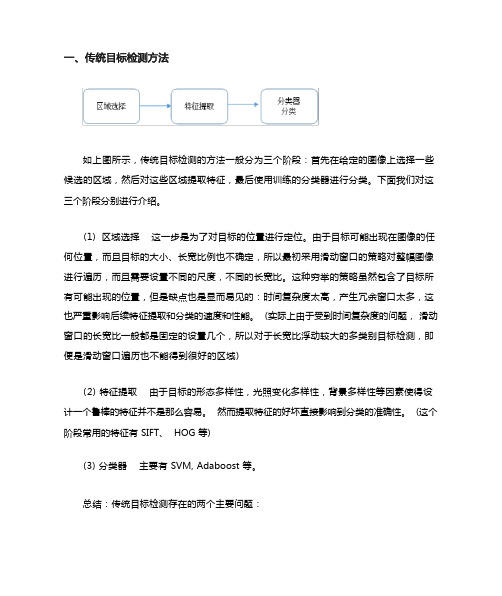
如上图所示,传统目标检测的方法一般分为三个阶段:首先在给定的图像上选择一些候选的区域,然后对这些区域提取特征,最后使用训练的分类器进行分类。
下面我们对这三个阶段分别进行介绍。
(1) 区域选择这一步是为了对目标的位置进行定位。
由于目标可能出现在图像的任何位置,而且目标的大小、长宽比例也不确定,所以最初采用滑动窗口的策略对整幅图像进行遍历,而且需要设置不同的尺度,不同的长宽比。
这种穷举的策略虽然包含了目标所有可能出现的位置,但是缺点也是显而易见的:时间复杂度太高,产生冗余窗口太多,这也严重影响后续特征提取和分类的速度和性能。
(实际上由于受到时间复杂度的问题,滑动窗口的长宽比一般都是固定的设置几个,所以对于长宽比浮动较大的多类别目标检测,即便是滑动窗口遍历也不能得到很好的区域)(2) 特征提取由于目标的形态多样性,光照变化多样性,背景多样性等因素使得设计一个鲁棒的特征并不是那么容易。
然而提取特征的好坏直接影响到分类的准确性。
(这个阶段常用的特征有 SIFT、 HOG 等)(3) 分类器主要有 SVM, Adaboost 等。
总结:传统目标检测存在的两个主要问题:一是基于滑动窗口的区域选择策略没有针对性,时间复杂度高,窗口冗余;二是手工设计的特征对于多样性的变化并没有很好的鲁棒性。
对于传统目标检测任务存在的两个主要问题,我们该如何解决呢?对于滑动窗口存在的问题, region proposal 提供了很好的解决方案。
region proposal (候选区域) 是预先找出图中目标可能出现的位置。
但由于 regionproposal 利用了图像中的纹理、边缘、颜色等信息,可以保证在选取较少窗口(几千个甚至几百个) 的情况下保持较高的召回率。
这大大降低了后续操作的时间复杂度,并且获取的候选窗口要比滑动窗口的质量更高(滑动窗口固定长宽比) 。
比较常用的 region proposal 算法有selective Search 和 edge Boxes ,如果想具体了解 region proposal 可以看一下PAMI2015 的“What makes for effective detection proposals?”有了候选区域,剩下的工作实际就是对候选区域进行图像分类的工作 (特征提取 +分类)。
脂多糖刺激巨噬细胞分泌含miR-155-5p_的外泌体促进肝星状细胞的活化及迁移

肝纤维化是肝炎-肝硬化-肝癌三部曲的重要病理表型,研究表明抑制肝纤维化能有效减缓肝炎向肝癌的进程[1]。
但目前临床上针对肝纤维化没有行之有效的治疗方案[2]。
因而,深入探索纤维化机制为寻找延缓乃至逆转纤维化的治疗靶点和节约医疗资源具有十分重要意义。
肝巨噬细胞在肝纤维化中发挥至关重要的作用,其主要功能与炎症、肝细胞损伤、肝星状细胞的活化和纤维化密切相关[3]。
肝星状细胞在肝脏生理和纤维生成起到关键作用,其能够受到肝巨噬细胞的调控[4]。
近来Lipopolysaccharide stimulates macrophages to secrete exosomes containing miR-155-5p to promote activation and migration of hepatic stellate cellsLIN Jiayi 1,LOU Anni 1,LI Xu 1,21Department of Emergency Medicine,Nanfang Hospital,Southern Medical University,Guangzhou 510515,China;2Key Laboratory of First Aid and Trauma Research,Ministry of Education,Hainan Medical College,Haikou 571199,China摘要:目的探索脂多糖(LPS )刺激下的巨噬细胞来源的外泌体对肝星状细胞的激活及迁移能力的影响及分子机制。
方法以100ng/mL 丙二醇甲醚醋酸(PMA )处理人THP-1巨噬细胞24h ,诱导其分化为巨噬细胞,给予脂多糖刺激后收集巨噬细胞的培养上清,运用超速离心法提取外泌体并加以鉴定。
荧光定量PCR (qRT-PCR )检测外泌体中miR-155-5p 的表达。
采用Transwell 共培养体系观察巨噬细胞分泌的外泌体对肝星状细胞LX2增殖、氧化应激、迁移和I 型胶原等纤维化标志物表达的影响。
目标检测参考文献
目标检测是计算机视觉领域中的一个重要任务,旨在识别和定位图像中的目标物体。
近年来,随着深度学习方法的发展,目标检测取得了显著的进展。
以下是一些经典的目标检测参考文献及其相关内容。
1.R-CNN: Rich feature hierarchies for accurate object detection 这是目标检测中的经典方法之一,引入了区域提议网络(Region Proposal Network)的概念,通过生成候选目标区域来提高检测的效果。
该方法通过使用卷积神经网络提取图像特征,并使用支持向量机对提取的特征进行分类和定位。
2.Faster R-CNN: Towards real-time object detection with regionproposal networks Faster R-CNN是R-CNN的改进版本,引入了一种称为Region Proposal Network(RPN)的网络模块,用于生成候选目标区域。
相比于R-CNN,Faster R-CNN在保持准确性的同时大幅提升了检测速度。
3.You Only Look Once: Unified, Real-Time Object Detection YOLO是一种实时目标检测方法,通过将目标检测问题转化为回归问题,并在单个神经网络中同时进行目标分类和定位,实现了快速准确的物体检测。
该方法在速度上具有显著优势,但在检测小物体和密集目标方面仍有改进空间。
4.Single Shot MultiBox Detector SSD是另一种实时目标检测方法,采用了特征金字塔网络(Feature Pyramid Network)和多尺度预测的策略,能够在不同尺度下同时检测目标。
SSD在准确性和速度方面取得了良好的平衡,成为目标检测领域的重要方法之一。
5.Mask R-CNN Mask R-CNN是在Faster R-CNN的基础上进行改进的方法,不仅可以检测和定位目标,还可以生成目标的语义分割掩码。
JDSU MTS T-BERD 8000平台光谱分析器模块说明书

MTS/T-BERD 8000 PlatformOptical Spectrum Analyzer ModulesFull-band, high-performance Optical Spectrum Analyzers for testing optical systems and componentsTargeted at providing advanced test solutions, the OSA-150, OSA-180 and the OSA-500 are the next generation of JDSU’s DWDM analyzer modules.A new monochromator design provides ultra high optical resolution, and outstanding wavelength accuracy in a small and rugged OSA module, offering the best field solution for testing DWDM and CWDM networks during installation, maintenance and trouble shooting.The JDSU OSA modules differentiate by the optical measurement resolution and are graded into three classes:The OSA-150 is JDSU’s basic OSA with an optical resolution of 100 pm to measure CWDM and • DWDM networks with moderate channel spacing of 100 GHz to CWDM.The high resolution OSA-18x DWDM analyzers are suited for testing DWDM networks with • tight channel spacing down to 50GHz. In addition the OSA-181 provides a unique channel drop function to isolate single DWDM channels from the spectrum.The ultra high resolution OSA-500 and OSA-500R have an industry leading resolution band-• width of 35 pm for measurements in ultra DWDM networks with channel spacing down to 25 Hz.The OSA-500R is equipped additionally with a new technique to measure the true OSNR in ROADM systems and 40G systems.Key FeaturesI n-band capability for true OSNR measurements in •ROADM and 40G networks Ultra-high optical resolution•Industry-leading wavelength accuracy guaranteed over •instruments lifetimeFuture-proof signal analysis for data rates of 40/100G,•and next-generation modulation formatsChannel drop function for single channel isolation and •tunable filter applications.PMD test option based on fixed analyzer method.•MTS/T-BERD platformApplicationsCommissioning and•maintenance of current and next generation DWDM systemsProvisioning and maintenance •of ROADM networksInstallation and maintenance of •CWDM networks Testing of 40G and 100G •networksSpectral testing of optical •components1981Advanced optical performanceJDSU’s OSA family combines outstanding wavelength accuracy, high dynamic range and an ultra-high resolution. All instruments are equipped with an internal wavelength reference for online calibration without requiring disruption of in-progress measurements. The internal wavelength calibrator is based on a physical constant reference that guarantees unsurpassed wavelength accu-racy over the instrument’s lifetime without the need of external recalibration (JDSU patents), saving recalibration cost.One-step system qualificationOne-button auto-testing guarantees that technicians need no special training to carry out a DWDM test, making JDSU’s instruments suitable for both novice and expert technicians. An Auto-Test mode automatically identifies WDM channels, selects the appropriate wavelength range, and provides auto scaling and system qualification according to pre-defined parameters.Flexible measurement capabilityIn-depth analysis, featuring statistical evaluation, and automatic storage capabilities, is provided. This allows for DWDM system performance verification, including the variation of optical sys-tem parameters (wavelength, power, and OSNR) as well as a series of measurements over a defined period of time. Resulting reports are provided with average, minimum, maximum, and standard deviation values of the measured parameters over time.Powerful pass/fail link managerGraphical and tabular display formats can be selected to assist in the installation, verification, and troubleshooting of multi-channel DWDM systems. Built-in test functions deliver automatic pass/ fail evaluations based on pre-defined alarms, saving time and providing technicians with a quick and intuitive overview of the complete set of results.Measurement of signals at high data rates and new modulation formatsData rates at 10 Gbps or higher have a larger optical bandwidth than the resolution bandwidth of an OSA, and with new modulation formats like duobinary (DB), differential phase shift keying (DPSK) or quadratur phase shift keying (QPSK), the spectral shape of a signal will change from one peak to multiple peaks. Regular OSAs will no longer correctly measure the central wavelength and the total signal power of such transmission signals.JDSU OSAs are prepared for these scenarios as they have a new signal analysis for accurate mea-surement of total channel power and center wavelength of modulated signals. All results will be presented in the WDM table.40 channel DWDM systemGraphical and tabular display showing pass/fail indicators and out-of-range valuesInstrument setupPrecise and correct detection of new modulation formatsNew in-band OSNR measurement techniqueIn ROADM networks the noise floor in between optical channels is suppressed by the optical fil-ters inside the ROADMs. In systems transmitting ultra high data rates like 40G/100G at tight channel spacing of 50 GHz, the modulation bandwidth is larger than the channel bandwidth thus leading to overlapping spectra. Both effects make conventional OSNR measurement based on the IEC interpolation method unreliable.The OSA-500R is JDSUs second generation of opti-cal spectrum analyzers performing the in-bandOSNR A new optical polarization splitting (OPS) method (patent pending) is used to suppress the transmission signal and to get access to the noise value inside the optical channel for measuring the true in-band OSNR. The only viable solution for any test scenarios, whatever the ROADM filter types, data rate or modulation formats.Built-in test applicationsTest applications for optical amplifiers (EDFA) and laser sources (DFB) facilitate network compo-nent verification.Drift measurementsFor optical performance monitoring it is essential to measure the key parameters over time. The built-in drift test application provides the result of power, wavelength and OSNR over a customer definable time frame in a graphical and numerical format. Drift measurements are important in CWDM networks with uncooled laser, which have a typical wavelength of 0.1 nm/°C.PMD test optionsWith the PMD option, the OSA can measure the differential group delay (DGD) for PMD charac-terization of optical fibers and systems. The measurement is based on the fixed analyzer method (TIA/EIA FOTP-113) together with a broadband source and a variable polarizer.Channel isolation (drop) and dual-port optionsA unique channel isolation option is provided to extract a single DWDM channel from the entire spectrum for further analysis with a SONET/SDH or Ethernet analyzer at data rates up to 12.5 Gbps. The built-in tracking function provides wavelength locking to the peak of the selected chan-nel in order to avoid channel frequency drift problems during long-term measurements. The dual-port option (JDSU patents) provides simultaneous measurement of two optical signals, mea-suring the input and output of an optical amplifier at the same time, for example.Advanced analysis solutionJDSU’s OFS-100 Optical FiberTrace Software is a PC-based software application within a true Microsoft Windows environment, offering post-analysis capabilities and the generation of detailed, professional OSA reports.Offline analysis OFS-100EDFA test applicationIn-band noise measurement of optical channels passingdifferent routes in a ROADM networkDrift analysisFull-band WDM analyzerOSA-150Operating modesWDM, DriftSpectral measurement ranges Wavelength range1250 to 1650 nm Measurement samples120,000 No. of optical channels256 Wavelength calibration (1)internal, online. Wavelength accuracy (2)± 100 pm Readout resolution 1 pm Resolution bandwidth(FWHM) (2)100 pmPower measurement rangesDynamic range (3)−60 to +15 dBm Absolute accuracy(2, 4)± 0.6 dBTotal safe power+23 dBm Readout resolution0.01 dBScanning time (full band) (C-band)<5 s <1 sOptical rejection ratio (ORR) (2)at ± 25 GHz (± 0.2 nm)not specified at ± 50 GHz (± 0.4 nm)40 dBc at ± 100 GHz (± 0.8 nm)>43 dBc(1) Built-in, physical constant wavelength calibrator,needs no re-calibration(2) Typical for 1520 to 1565 nm at 18° to 28 °C(3) Max. power per channel +15 dBm(4) At −10 dBm, including PDL(5) −45 dBm to +10 dBm, at 23 °C Full band DWDM AnalyzerOSA-180 / OSA-181Operating modesWDM, Drift, DFB, LED, FPL, EDFASpectral measurement rangesWavelength range1250 to 1650 nmMeasurement samples120,000No. of optical channels256Wavelength calibration (1)internal, online.Wavelength accuracy (2)typ. ± 20 pmReadout resolution 1 pmResolution bandwidth(FWHM) (2)typ. 70 pmPower measurement rangesDynamic range (3)−65 to +23 dBmAbsolute accuracy(2, 4)typ. ± 0.5 dBLinearity (5)± 0.1 dBTotal safe power+23 dBmReadout resolution0.01 dBScanning time (full band)(C-band)<5 s<1 sOptical rejection ratio (ORR) (2)at ± 25 GHz (± 0.2 nm)typ. 35 dBcat ± 50 GHz (± 0.4 nm)typ. 45 dBcChannel drop option (OSA-181 only)Wavelength range 1300 to 1650 nmData rates up to 12.5 GbpsSpectral filter bandwidth>20 GHzInsertion loss(6)typ. <12 dBTracking mode Auto wavelength control(6) 1520 to 1620 nm at 23 °C(7) For data rates up to 10 Gbps(8) For OSNR ≤ 25 dB and PMD <25 psFor data rates of ≥ 40 Gbpswith ≥ 100 GHz ch- spacing typically ± 1 dB(9) Fast mode, independent of no of channelsHigh Perf. DWDM AnalyzerOSA-500 / OSA-500ROperating modesWDM, Drift, DFB, LED, FPL, EDFAIn-band OSNR (OSA-500R only)Spectral measurement rangesWavelength range1250 to 1650 nmMeasurement samples120,000No. of optical channels256Wavelength calibration(1)internal, online.Wavelength accuracy (2)typ. ± 10 pmReadout resolution 1 pmResolution bandwidth(FWHM) (2)typ. 35 pmPower measurement rangesDynamic range (3)−70 to +20 dBmAbsolute accuracy(2, 4)typ. ± 0.5 dBLinearity (5)± 0.1 dBTotal safe power (12)+23 dBmReadout resolution0.01 dBScanning time (full band)(C-band)<5 s<1 sOptical rejection ratio (ORR) (2, 11)at ± 25 GHz (± 0.2 nm)typ. 45 dBcat ± 50 GHz (± 0.4 nm)typ. 50 dBcIn-band OSNR (10) (OSA-500R only)I-OSNR dynamic range up to >30 dBPMD tolerance (7)up to 25 psMeasurement accuracy(8)typ. ± 0.5 dBData signals up to 100 GbpsMeasurement time(9)<2 min(10) only valid for OSA-500R(11) For OSA-500R ORR is reduced by 3 dB(12) +20 dBm for OSA-500ROSA Selection GuideA comprehensive portfolio to better match your application requirements.ApplicationTechnology CWDM DWDM DWDM UDWDM Channel drop ROADMin-band OSNR Instrument class Ch-spacing20 nm100 GHz50 GHz25 GHzBasic OSA OSA-150X X––––High resolution OSA OSA-180X X X–––OSA-181X X X–X–Ultra high resolution OSA OSA-500X X X X––OSA-500R X X X X–XGeneral specificationsDisplay modesGraph, WDM table, graph and tableOptical ports (physical contact interfaces)Input port SMOutput port (drop port OSA-181)SMOptical return loss>35 dBInterface Universal connectors/PCOptical adapters FC, SC, ST, LC, DINTemperatureOperating+5 to +50 °C / 41 to 122 °FStorage−20 to +60 °C / -4 to 140 °FWeight (module only )OSA-150/18x/500 2.2 kg / 4.6 lbsSize (module only )OSA-150/18x/50050 x 250 x 305 mm /2 x 10 x 12 inOSA modulesOrdering information for Full-band DWDM analyzersBasic OSAs2281/91.15OSA-150High-resolution OSAs2281/91.18OSA-1802281/91.22OSA-181, with channel drop 12.5GUltra-high resolution OSAs2281/91.51OSA-500, high performance DWDM OSA2281/91.55OSA-500R, high performance DWDM & ROADM OSAPMD test option (for OSA-18x/500/500R)2281/91.11PMD test kitincludes PMD evaluation SW plus2279/31OBS-55, Optical Broadband Sourceplus2271/01OVP-15, Optical Variable PolarizerApplication softwareEOFS100Optical fiber trace software for post-analysisEOFS200Optical fiber trace software for cable acceptance report generation Test & Measurement Regional Sales。
基于边缘检测的抗遮挡相关滤波跟踪算法

基于边缘检测的抗遮挡相关滤波跟踪算法唐艺北方工业大学 北京 100144摘要:无人机跟踪目标因其便利性得到越来越多的关注。
基于相关滤波算法利用边缘检测优化样本质量,并在边缘检测打分环节加入平滑约束项,增加了候选框包含目标的准确度,达到降低计算复杂度、提高跟踪鲁棒性的效果。
利用自适应多特征融合增强特征表达能力,提高目标跟踪精准度。
引入遮挡判断机制和自适应更新学习率,减少遮挡对滤波模板的影响,提高目标跟踪成功率。
通过在OTB-2015和UAV123数据集上的实验进行定性定量的评估,论证了所研究算法相较于其他跟踪算法具有一定的优越性。
关键词:无人机 目标追踪 相关滤波 多特征融合 边缘检测中图分类号:TN713;TP391.41;TG441.7文献标识码:A 文章编号:1672-3791(2024)05-0057-04 The Anti-Occlusion Correlation Filtering Tracking AlgorithmBased on Edge DetectionTANG YiNorth China University of Technology, Beijing, 100144 ChinaAbstract: For its convenience, tracking targets with unmanned aerial vehicles is getting more and more attention. Based on the correlation filtering algorithm, the quality of samples is optimized by edge detection, and smoothing constraints are added to the edge detection scoring link, which increases the accuracy of targets included in candi⁃date boxes, and achieves the effects of reducing computational complexity and improving tracking robustness. Adap⁃tive multi-feature fusion is used to enhance the feature expression capability, which improves the accuracy of target tracking. The occlusion detection mechanism and the adaptive updating learning rate are introduced to reduce the impact of occlusion on filtering templates, which improves the success rate of target tracking. Qualitative evaluation and quantitative evaluation are conducted through experiments on OTB-2015 and UAV123 datasets, which dem⁃onstrates the superiority of the studied algorithm over other tracking algorithms.Key Words: Unmanned aerial vehicle; Target tracking; Correlation filtering; Multi-feature fusion; Edge detection近年来,无人机成为热点话题,具有不同用途的无人机频繁出现在大众视野。
OPTIFLECF简易操作手册

O P T I F L E C F简易操作手册公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]两线制导波雷达(TDR )物位仪表测量液体和浆液的距离、液位、体积,也适用于粉料和固体颗粒本文件根据以下文件编辑整理,如有更改,恕不通知。
手册OPTIFLEX 2200 C/F目录本手册是为现场接线、安装调试提供便捷途径。
详细内容请阅读随机光盘操作手册!1开箱、交货范围①转换器和天线②同轴套管,标配没有!③快速安装说明(英文版)④光盘(包含所有的文件)⑤开盖工具⑥保护帽,用于转换器维修时防止传感器顶部进水。
2 安装要点天线周围300mm半径内没有影响雷达波的机械结构件或受到物料冲刷,短节高度小于直径(h<d)。
3开盖与接线开盖取下外壳与前盖(或后盖)之间的紧固组件。
用开盖工具逆时针旋转前盖(或后盖),从刻度①---刻度②。
向上提出前盖(或后盖)③3.2接线二线制4--20mA回路供电信号接线,信号地③,设备地④分体型仪表传感器与转换器接线打开转换器与传感器盖子,用一根四芯帯屏蔽导线一一对应接线。
(防爆型仪表必须配科隆原厂导线)4就地显示和键盘操作正常显示状态设置显示状态①百分百显示⑤更新数据①菜单功能描述②显示内容:液位、距离等⑥测量值和单位②设置状态③报警信息⑦设备状态③菜单编号④位号⑧键盘面板按键定义:1号键2号键3号键4号键①液位、距离、体积等切换请注意:按住4号键3秒钟,显示语言转换为英语。
再次按住该键3秒钟,显示语言会从英语转换为所设定的语言。
5 菜单操作6 仪表安装时必需设置的内容(快速设置)缆长设置(菜单)加大,可以先加的大一点,读出空罐时的距离,再在该距离的基础上重新设置罐高(菜单)(空罐时的距离+110mm)死区设置(菜单)400~500mm输出范围(菜单)选择4-20mA故障延时(菜单)设置为5min跟踪速度(菜单)根据实际进出料的速度尽量取小天线末端脉冲振幅(菜单)查看实际末端信号大小,然后在天线末端阈值(菜单)中进行修改,尽量将门槛设低。
目标检测学术英语
目标检测学术英语Object detection is a fundamental task in computer vision, which aims to locate and classify objects within an image or video. It has a wide range of applications, including autonomous vehicles, surveillance systems, and augmented reality. In recent years, deep learning-based object detection methods have achieved remarkable performance, outperforming traditional methods in terms of accuracy and efficiency.There are several popular object detection frameworks, such as YOLO (You Only Look Once), SSD (Single Shot Multibox Detector), and Faster R-CNN (Region-based Convolutional Neural Network). These frameworks differ in their approach to object detection, with some prioritizing speed and others prioritizing accuracy. YOLO, for example, is known for its real-time performance, while Faster R-CNN is renowned for its accuracy.One of the key challenges in object detection is handling occlusions, variations in scale, and cluttered backgrounds. This requires the use of sophisticated algorithms and network architectures to effectively detectobjects under these conditions. Additionally, object detection models need to be robust to changes in lighting, weather, and other environmental factors.In recent years, there has been a surge of interest in improving object detection performance through the use of attention mechanisms, which allow the model to focus on relevant parts of the image. This has led to the development of attention-based object detection models, such as DETR (DEtection TRansformer) and SETR (SEgmentation-TRansformer).Furthermore, the integration of object detection with other computer vision tasks, such as instance segmentation and pose estimation, has become an active area of research. This integration allows for a more comprehensive understanding of the visual scene and enables more sophisticated applications.In conclusion, object detection is a critical task in computer vision with a wide range of applications. Deep learning-based methods have significantly advanced the state-of-the-art in object detection, and ongoing researchcontinues to push the boundaries of performance and applicability.目标检测是计算机视觉中的一个基本任务,旨在定位和分类图像或视频中的对象。
基于YOLOv5和重识别的行人多目标跟踪方法

第37卷第7期2022年7月Vol.37No.7Jul.2022液晶与显示Chinese Journal of Liquid Crystals and Displays基于YOLOv5和重识别的行人多目标跟踪方法贺愉婷1,2,车进1,2*,吴金蔓1,2(1.宁夏大学物理与电子电气工程学院,宁夏银川750021;2.宁夏沙漠信息智能感知重点实验室,宁夏银川750021)摘要:针对目前遵循基于检测的多目标跟踪范式存在的不足,本文以DeepSort为基础算法展开研究,以解决跟踪过程中因遮挡导致的目标ID频繁切换的问题。
首先改进外观模型,将原始的宽残差网络更换为ResNeXt网络,在主干网络上引入卷积注意力机制,构造新的行人重识别网络,使模型更关注目标关键信息,提取更有效的特征;然后采用YOLOv5作为检测算法,加入检测层使得模型适应不同尺寸的目标,并在主干网络加入坐标注意力机制,进一步提升检测模型精度。
在MOT16数据集上进行多目标跟踪实验,多目标跟踪准确率达到66.2%,多目标跟踪精确率达到80.8%,并满足实时跟踪的要求。
关键词:多目标跟踪;行人重识别;YOLOv5;注意力机制;深度学习中图分类号:TP391文献标识码:A doi:10.37188/CJLCD.2022-0025Pedestrian multi-target tracking method based on YOLOv5and person re-identificationHE Yu-ting1,2,CHE Jin1,2*,WU Jin-man1,2(1.School of Physics and Electronic-Electrical Engineering,Ningxia University,Yinchuan750021,China;2.Ningxia Key Laboratory of Intelligent Sensing for Desert Information,Yinchuan750021,China)Abstract:Aiming at the shortcomings of current detection-based multi-target tracking paradigm,a research is conducted based on the algorithm of DeepSort to address the issue of frequent switching of targeted ID resulting from occlusion in tracking process.Firstly,focus should be placed on improving appearance model.Efforts should be made in replacing broadband and residual networks with ResNeXt networks,which introduces the mechanism for convolution attention into the backbone network and establish a new person re-identification network.In doing so,the model can pay more attention to critical information of targets and obtain effective features.Then,YOLOv5serves as a detection algorithm. Adding detection layer enables the model to respond to targets of different sizes.Moreover,the mechanism for coordinate attention is introduced into the backbone networks.These efforts can further 文章编号:1007-2780(2022)07-0880-11收稿日期:2022-01-24;修订日期:2022-02-11.基金项目:国家自然科学基金(No.61861037)Supported by National Natural Science Foundation of China(No.61861037)*通信联系人,E-mail:koalache@第7期贺愉婷,等:基于YOLOv5和重识别的行人多目标跟踪方法improve the accuracy of detection model.The multi-target tracking experiment is carried out on data sets of MOT16,the multi-target tracking accuracy rate is up to66.2%,and the multi-target tracking precision ratio is up to80.8%.All these can meet the needs of real-time tracking.Key words:multi-target tracking;person re-identification;YOLOv5network;attention mechanism;deep learning1引言多目标跟踪(Multiple Target Tracking,MTT)主要任务是在给定视频中同时对多个特定目标进行定位,同时保持目标的ID稳定,最后跟踪记录他们的轨迹[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Feature detection and tracking in optical flow on non-flat manifoldsSheraz Khan a ,c ,d ,⇑,Julien Lefevre b ,Habib Ammari c ,Sylvain Baillet a ,eaDepartment of Neurology,Medical College of Wisconsin,Milwaukee,USAbAix-Marseille Univ,Département d’Informatique de Luminy /CNRS,LSIS,UMR 6168,13397Marseille,France cCenter of Applied Mathematics,Ecole Polytechnique,France dDepartment of Neurology,MGH/Harvard Medical School,Boston,USA eMontreal Neurological Institute,McGill University,Montreal,Canadaa r t i c l e i n f o Article history:Received 22September 2010Available online 19September 2011Communicated by A.Shokoufandeh Keywords:Optical flowHelmholtz–Hodge decomposition Feature detection Image processingRiemannian formalism Vector fieldsa b s t r a c tOptical flow is a classical approach to estimating the velocity vector fields associated to illuminated objects traveling onto manifolds.The extraction of rotational (vortices)or curl-free (sources or sinks)fea-tures of interest from these vector fields can be obtained from their Helmholtz–Hodge decomposition (HHD).However,the applications of existing HHD techniques are limited to flat,2D domains.Here we demonstrate the extension of the HHD to vector fields defined over arbitrary surface manifolds.We pro-pose a Riemannian variational formalism,and illustrate the proposed methodology with synthetic and empirical examples of optical-flow vector field decompositions obtained on a variety of surface objects.Ó2011Elsevier B.V.All rights reserved.1.IntroductionThe optical flow in a scene is the apparent motion of objects,induced by the observed temporal variations of local brightness.Under certain conditions,it provides an adequate model for objects’displacement fields,Horn and Schunck (1981).In most applications,however,the definition of the optical flow is restricted to two-dimensional (2D),i.e.flat,surface manifolds.This hinders some potentially high-impact applications of the optical flow,e.g.the study of turbulent flow over general surfaces.We recently intro-duced a new variational framework to estimate optical-flow vector fields on non-flat surfaces using a Riemannian formulation,Lefèvre and Baillet (2008).In most applications,features of interest such as sources,sinks and traveling waves,need to be extracted from time-varying optical-flow vector fields,and be interpreted as meaningful components of the kinematics of the observed phenomena.The Helmholtz–Hodge decomposition (HHD)of vector fields has proven to be a useful technique in that respect,Chorin and Mars-den (1993).HHD proceeds by decomposing vector fields defined in 2D flat domains,Guo et al.(2005)or full 3D geometry,Tong et al.(2003),into the sum of:a curl-free component,deriving from the gradient of a scalar potential U ;a non-diverging component,deriving from the curl of a scalar (in 2D)or vector (in 3D)potential A ;an harmonic component H ,with zero Laplacian.Singularities or vanishing points in the optical-flow vector field can be detected using these components,as shown in e.g.,Guo et al.(2005),and as we shall detail in Section 3.3of this article.As already mentioned,a large number of new fields of application would ben-efit from a generic and principled approach to the HHD of vector fields on surface manifolds:e.g.,experimental fluid dynamics and turbulence (Corpetti et al.,2003;Palit et al.,2005);physiological modeling (Guo et al.,2006);structural and functional neuroimag-ing (Lefevre et al.,2009),and the compressed representation of large,distributed vector fields (Scheuermann and Tricoche,2005).It has been suggested that approximations to surface-based HHD could be achieved using polyhedral surfaces,in the local Euclidean geometry of the manifold (Polthier and Preuss,2003).This however proves to be problematic,when the vector fields are defined over highly-curved surface supports.Indeed,we have shown previously that the surface curvature plays a crucial role in the robust estimation of vector fields within the tangent bundle of the surface support (Lefèvre and Baillet,2008).Our results also showed that the non-flatness properties of the surface may cause convergence issues in the estimation process of the vector field.We note however that new results in the Euclidian domain that do not require a meshed tessellation of the surface were published recently and indicate a promising alternative to our approach (Petronetto et al.,2009).0167-8655/$-see front matter Ó2011Elsevier B.V.All rights reserved.doi:10.1016/j.patrec.2011.09.017⇑Corresponding author at:Department of Neurology,Massachusetts General Hospital,Harvard Medical School,Boston,MA 02129,USA.Tel.:+16176435634;fax:+16179485966.E-mail address:sheraz@ (S.Khan).We show in this article how the HHD can be performed onto non-flat domains and we extended the study to the extraction of basic kinetic features of interest from the HHD components.In line with our previous developments(Lefèvre and Baillet,2008),the present results were worked in the framework of differential geometry on2-Riemannian manifolds and a numerical implemen-tation using the Finite Element Method(FEM).Important concepts and notations from this framework are revisited in Section2.Sec-tion3introduces the proposed framework for HHD.The method is then featured with a variety of results in Section4.We emphasize that the software implementation of the meth-ods are available for download,as a plugin to the Brainstorm aca-demic software for electromagnetic brain imaging(http:// /brainstorm,requires Matlab and has been optimized for multithreaded computation).2.Technical backgroundThis section is a summary of the concepts and notations that are appropriate to the2-Riemannian manifold framework and its FEM implementation.More details can be found in(Do Carmo,1993; Lefèvre and Baillet,2008).2.1.Differential geometryLet us consider M,a surface(or2-Riemannian manifold) equipped by a metric or scalar product g(Á,Á)to measure distances and angles on the surface.M can be parameterized with local charts(x1,x2).Thus,it is possible to obtain a normal vector at each surface point:n p¼@@x1Â@@x2:Note that n p does not depend on the(x1,x2)parametrization.Let U:M!R be a function defined on the surface,and its dif-ferential dU:T M!R,acting on T M,the space of vectorfields.We then can write:dUðv1;v2Þ¼@U1v1þ@U2v2:Let us then define the gradient and divergence operators through duality:d UðVÞ¼gð$M U;VÞ;ZM U div M H¼ÀZMgðH;$M UÞ:We emphasize that the gradient and divergence measures are also independent of the surface parametrization.Lastly,let us define two additional functional spaces that will be useful for a theorem proposed in Section4:H1ðMÞis the space of differentiable functions on the manifold M,and C1ðMÞis the space of vectorfields,which satisfy good properties for regularity(as dis-cussed in(Druet et al.,2004;Lefèvre and Baillet,2008)).2.2.OpticalflowUnder the seminal hypothesis of the conservation of a scalar field I along streamlines,the opticalflow V is a vectorfield which satisfies:@t IþgðV;r M IÞ¼0:ð1ÞNote that the scalar product g(Á,Á)is modified by the local curva-ture of the surface domain M.The solution to Eq.(1)is not unique as long as the components of V(p,t)orthogonal to r M I are left unconstrained.This so-called‘aperture problem’has been addressed by a large number of methods using e.g.,regularization approaches.These latter may be formalized as the minimization problem of an energy functional,which both includes the regular-ity of the solution and the agreement with the model:EðVÞ¼ZM@I@tþgðV;r M IÞ2d lþkZMCðVÞd l;ð2Þwhere d l is a volume form of the manifold M.In this study,we used a regularity operator that is quadratic in the generalized gradient of the expected vectorfield:CðVÞ¼Trðt r VÁr VÞ;ð3Þwe note that the gradient of a vectorfield must be defined as the covariant derivative associated to the manifold M,so that it can be considered as an intrinsic tensor.We refer to the general con-cepts of differential geometry for more information(Do Carmo, 1993).3.Helmholtz–Hodge decomposition on a2-Riemannian manifoldWe now introduce an extended framework to perform HHD on surfaces and show that it can be applied to any vectorfield defined on a2-Riemannian manifold,M.3.1.Definitions and theoremLet usfirst define the scalar and vectorial curls by:Curl M:H1ðMÞ!C1ðMÞcurl M:C1ðMÞ!H1ðMÞCurl M A¼$M AÂn;curl M H¼div MðHÂnÞ:Note that these intrinsic expressions are not dependent on the parametrization of the surface.As established in(Polthier and Preuss,2003),we assume that M is a closed manifold,i.e.it has no boundaries.Given V,a vectorfield in C1ðMÞ,there exists functions U and A(up to an additive con-stant)in H1ðMÞand a vectorfield H in C1ðMÞsuch that:V¼$M UþCurl M AþH;ð4Þwherecurl Mð$M UÞ¼0;div MðCurl M AÞ¼0;div M H¼0;curl M H¼0:To prove this theorem,we show how U and A may be con-structed.Following classical constructions,we consider U and A as minimizers of the two following convex functionals,which are not necessarily unique:ZMk VÀ$M U k2d l;ð5ÞZMk VÀCurl M A k2d l;ð6Þwhere kÁk is the norm associated to the Riemannian metric g(Á,Á).These two functionals carry a global minimum on H1ðMÞ,which satisfies:8/2H1ðMÞ;ZMgðV;$M/Þd l¼ZMgð$M U;$M/Þd l;ð7Þ8/2H1ðMÞ;ZMgðV;Curl M/Þd l¼ZMgðCurl M A;Curl M/Þd l:ð8ÞThese two equations will play a key role in the subsequent numerical computations,as detailed below.The rest of the proof is provided in the Appendix.2048S.Khan et al./Pattern Recognition Letters32(2011)2047–20523.2.DiscretizationEqs.(7)and (8)are crucial since they pave the way to numerical implementation,when H 1ðMÞis approximated by a subspace of fi-nite elements (e.g.,continuous linear piecewise functions).We now detail the numerical implementation of Eqs.(9)and(10),which are defined over a surface tessellation c Mthat approx-imates the ideal manifold.Let N be the number of nodes in the tes-sellation (Fig.1).In the FEM implementation,we define N continuous piecewise affine functions /i ,decreasing from a value of 1at node i ,to 0at the other triangle nodes.Using these basis functions (/1,...,/n ),we can write U =(U 1,...,U n )T ,A =(A 1,...,A n )T ,and Eqs.(7)and (8)become,using array notations:Z Mg ð$M /i ;$M /j Þ i ;jU ¼Z Mg ðV ;$M /i Þi;ð9ÞZMg ðCurl M /i ;Curl M /j Þ i ;jA ¼Z Mg ðV ;Curl M /i Þ i;ð10Þwhere [Á]i ,j is a N ÂN square matrix and [Á]i is a column vector of length N .The harmonic component H of the vector field V is obtained as:H ¼V À$M U ÀCurl M A :ð11ÞThe gradient of each basis function is constant on each triangle and can be simply computed with geometrical quantities (see Lefè-vre and Baillet (2008)).Hence Eq.(9)reads:3.3.HHD feature detection as critical points of potentialsThe critical points of a vector field are often obtained from the eigenvalues of their Jacobian matrix.However,it has been shown that feature detection from critical points in global potential fields is less sensitive to noise in the data (Tong et al.,2003)and there-fore less prone to false positive detections than with methods based on the extraction of local Jacobian eigenvalues (Mann and Rockwood,2002).We therefore define critical points in the flow as local extrema of the divergence-free potential A (representing rotation)and curl-free potential U (representing divergence).A sink (respectively,a source)is thus defined as a local maxi-mum (respectively,minimum)of U .Counterclockwise (respec-tively,clockwise)vortices are featured by local maximum (respectively,minimum)of A .Further,since H is a curl-free vector field with zero divergence,traveling objects may be detected from vector elements bearing the largest magnitudes in the H vector field.4.ResultsThe proposed approach was first evaluated by detecting sources and sinks on a spherical surface bearing a rotating vector field,as shown in Fig.2.A possible real-life situation with such vector field patterns would be the air flow over a rotating spherical projectile.The HHD decomposition was applied on this vector field and vortices were identified from the critical points in A ,which was textured over the surface,as shown in Fig.2.In the case of a coun-ter-clockwise rotating vector field,the vortex was found as the maxima in the distribution of A ;for a clockwise rotating vector S.Khan et al./Pattern Recognition Letters 32(2011)2047–20522049shows a snapshot of a diverging vector field with two sources,overlaid with a texture of the values of U ,thereby revealing the correct locations of the sources in the vector field.Fig.3(c)and (d)extend further these results using vector fields with both rotating and diverging components.It is shown that features of different categories can be extracted at once from a vec-tor field.Our colormap shows sources and clockwise vortices in blue (local minima);sinks and counter-clockwise vortices in red (local maxima).In another set of simulations,a traveling source and a traveling vortex were tracked on the surface of the bunny manifold,by iden-tifying the critical points of the U and A HHD scalar fields (Fig.4(a)).Additionally,a surface patch of constant illumination was dis-placed onto the surface using the advection equation along a pre-defined vector field (Lefèvre and Baillet,2008)that defined a trajectory.This object was tracked with the vectors of largest norm in H vector field (Fig.4(b)).Fig.4shows snapshots of the tracking simulation.A black arrow has been used to trace path of sources and vortex in Fig.4(a)and moving the object in Fig.4(b).We further tested the HHD using experimental functional brain imaging data obtained from magnetoencephalography (MEG)(Baillet et al.,2001).Brain responses were recorded over 151MEG sensors following repeated somatosensory stimulation of the median nerve of the right hand (200trials),sampled at 1024Hz.Cortical currents were constrained on a surface tessella-tion of the subject’s brain containing about 50,000triangle nodes.The brain surface tessellation was obtained from the tissue seg-mentation of T1weighted magnetic resonance image data using brainVISA ( ).The cortical currents were esti-mated with a regularized minimum-norm inverse model as de-tailed in (Baillet et al.,2001).The vector field of the optical flow of these currents were computed using the method described in (Lefèvre and Baillet,2008),as implemented by us in the Brain-Storm software package (/brainstorm ).HHD was then applied to detect sources and sinks in the vector fields of the cortical currents.The source pattern at about 30ms after stimulus onset obtained from the event-related average of all trials revealed the expected primary somatosensory brain re-sponse.Fig.5shows a strong divergent pattern of the vector field over the central sulcus contralateral to the side of the stimulation.Computations to obtain all HHD components on the 50,000-node brain surface tessellation took about 10s using a conven-tional workstation with 8cores.Additional results are featured as Supplementary material .5.ConclusionIn this contribution,we developed a framework for the HHD of optical flow vector fields over 2-Riemannian manifolds.We sug-gest that features of interest regarding the kinetics supported by vector fields can be extracted and tracked through the potential components of the HHD.The required computations are simple and are made available to the academic community as part as the distribution of BrainStorm.Evaluation of this framework under real and simulated environments may open promising applications in the emerging field of multi-dimensional imaging.Appendix AWe show that the scalar potentials U and A can be obtained up to a constant.If we consider two minimizers U 1and U 2for the functional in (5)then from Eq.(7),we get:8/2H 1ðMÞ;ZMg ð$M ðU 1ÀU 2Þ;$M /Þd l ¼0:Green’s formula allows to transform this equation (given that M has no boundaries)as follows:8/2H 1ðMÞ;ZM/div M $M ðU 1ÀU 2Þd l ¼0;which corresponds to the Laplace equation:D M ðU 1ÀU 2Þ¼0;where D M ¼div M $M is the Laplace–Beltrami operator.The same approach can be followed for two minimizers A 1and A 2of the functional in Eq.(6).Hence,writing R =U 1ÀU 2and R 0=A 1ÀA 2,we obtained the following two conditions:D M R ¼0;D M R 0¼0:Multiplying by R the first equation and integrating on the man-ifold weget:rotating vector fields over a spherical surface object (shown with green arrows).(a)Counter-clockwise rotating vector field and divergence-free potentials A obtained from the HHD of the vector fields were mapped onto the surface as a colored texture.In both cases,extrema in the A map (maximum in (a),minimum in (b)).Values of A are shown in arbitrary,scaled units.(For interpretation of the reader is referred to the web version of this article.)ZMR D M R d l¼0:Applying Green’s formula yields:ZMgð$M R;$M RÞd l¼0:It follows that$M R must equal zero and R must be a constant.The same approach can be applied to R0,which must be constant.We then define the conditions on the vectorfield H.Wefirst write H¼VÀ$M UþCurl M A,and obtain:div M H¼div M VÀdiv M$M U and curl M H¼curl M VÀcurl M Curl M A;since div M Curl M A¼0and curl M$M U¼0.It follows that:8/2H1ðMÞ;ZM /div M H d l¼ZM/ðdiv M VÀdiv M$M UÞd l:Using Green’s formula and Eq.(7),we obtain: 8/2H1ðMÞ;ZM/div M H d l¼ZM gðV;$M/ÞÀZMgð$M U;$M/Þd l¼0:We have then proved that div M H¼0.The same strategy applies to obtain curl M H¼0.Appendix B.Supplementary dataSupplementary data associated with this article can be found,in the online version,at doi:10.1016/j.patrec.2011.09.017.ReferencesBaillet,S.,Mosher,J.,Leahy,R.,2001.Electromagnetic brain mapping.IEEE Signal Process.Mag.18(6),14–30.Chorin,A.,Marsden,J.,1993.A Mathematical Introduction to Fluid Mechanics.Springer.Corpetti,T.,MTmin, E.,PTrez,P.,2003.Extraction of singular points from dense motionfields:an analytic approach.J.Math.Imaging Vision19, 175–198.Do Carmo,M.,1993.Riemannian Geometry.Birkhauser.Druet,O.,Hebey, E.,Robert, F.,2004.Blow-Up Theory for Elliptic PDEs in Riemannian Geometry.Princeton University Press,Princeton,N.J(Chapter.Background Material,pp.1–12).Guo,Q.,Mandal,M.,Li,M.,2005.Efficient Hodge–Helmholtz decomposition of motionfields.Pattern Recognition Lett.26(4),493–501.Guo,Q.,Mandal,M.,Liu,G.,Kavanagh,K.,2006.Cardiac video analysis using Hodge–Helmholtzfield put.Biol.Med.36(1),1–20.Horn, B.,Schunck, B.,1981.Determining Optical Flow.Artif.Intell.17(1-3), 185–203.Lefèvre,J.,Baillet,S.,2008.Opticalflow and advection on2-Riemannian manifolds:A common framework.IEEE Trans.Pattern Anal.Machine Intell.30(6),1081–1092rs.fr/publications/2008/LB08.Lefevre,J.,Leroy,F.,Khan,S.,Dubois,J.,Huppi,P.,Baillet,S.,Mangin,J.,2009.Identification of Growth Seeds in the Neonate Brain through Surfacic Helmholtz Decomposition.In:21st Information Processing in Medical Imaging, Williamsburg.Mann,S.,Rockwood,A.,puting singularities of3D vectorfields with geometric algebra.Proc.IEEE Visual.,283–289.Palit,B.,Basu,A.,Mandal,M.,2005.Applications of the discrete Hodge Helmholtz decomposition to image and video processing.Lect.Notes Comput.Sci.3776, 497.Petronetto,F.,Paiva,A.,Lage,M.,Tavares,G.,Lopes,H.,Lewiner,T.,2009.Meshless Helmholtz–Hodge decomposition.IEEE put.Graphics, 338–349.Polthier,K.,Preuss,E.,2003.Identifying vectorfields singularities using a discrete Hodge decomposition.Visual.Math.3,113–134.Scheuermann,G.,Tricoche,X.,2005.Topological Methods for Flow Visualization.The Visualization Handbook,341–356.Tong,Y.,Lombeyda,S.,Hirani,A.,Desbrun,M.,2003.Discrete multiscale vectorfield decomposition.ACM Trans.Graphics22(3),445–452.。