控制器的动态特性
控制系统的静态和动态性能指标
业精于勤,荒于嬉,行成于思,毁于随
19
设计实例:移动机器人驾驶控制
严重残障人士的行动可以借助于移动机器人。这种机
器人的驾驶控制系统可用以下框图表示,驾驶控制器G1(s)
为:
G1(s)
K1
K2 s
当输入为阶跃信号,K2=0时,系统的稳态误差为: (你能算一下吗?)
es业s 精于1勤,荒AK于K嬉1,行成于思,毁于随
t
s0
s0 1 kG(s)
当输入信号为以下三种典型信号之一时,稳态误差为
单位阶跃函数:r(t) 1, R(s) 1 , s
e ss
lim
s0
1
1 k G( s)
单位斜坡函数:r(t)
t,
R(s)
1 s2
,
1
e ss
lim
s0
ksG(s)
单位加速度函数:r(t)
1 2
n2
其中 称作系统的阻尼系数,n称作固有频率,T
称作时间常数。系统的阶跃响应为
1
n
y(t)
1
1
ent
s in( n t
)
其中 1 2 , cos1 ,0 1。
业精于勤,荒于嬉,行成于思,毁于随
8
二阶系统的动态性能指标
峰值时间tp 超调量
输出的变化为
Y (s)
G(s)
R(s)
(1 GK (s) GK (s))(1 GK (s))
通常GK (s) GK (s),于是有
Y (s)
G(s) (1 GK (s))2
R(s)
控制系统动态响应特性

控制系统动态响应特性控制系统的动态响应特性是指控制系统在外部输入变化时,系统的动态性能和响应速度。
一个好的动态响应特性能够保证系统能够快速而准确地响应外部输入变化,从而实现稳定的控制效果。
本文将从控制系统动态响应的定义、重要性、常见指标以及改善方法等方面进行探讨。
1. 控制系统动态响应的定义和重要性控制系统动态响应是指系统在受到外部输入变化时的响应速度和性能表现。
动态响应特性直接影响到系统的控制效果和稳定性。
一个优良的动态响应特性能够使系统在外部输入变化时快速而平稳地调整输出,从而保证系统的稳定性和性能。
2. 常见控制系统动态响应指标在评估和分析控制系统动态响应特性时,常用的指标包括:(1) 超调量(Overshoot):超调量是指系统在响应过程中最大超过稳态值的幅度。
较小的超调量表示系统响应平稳。
(2) 上升时间(Rise Time):上升时间是系统从初始状态到达稳态值所需的时间。
较短的上升时间表示系统响应迅速。
(3) 峰值时间(Peak Time):峰值时间是系统响应过程中达到超调量峰值的时间。
较短的峰值时间表示系统响应迅速。
(4) 调节时间(Settling Time):调节时间是指系统从超调后回到稳态值所需的时间。
较短的调节时间表示系统响应稳定且快速。
(5) 稳态误差(Steady-state Error):稳态误差是指系统在达到稳态时与期望值之间的差距。
较小的稳态误差表示系统具有较高的控制精度。
3. 改善控制系统动态响应的方法为了改善控制系统的动态响应特性,有以下几种常见的方法:(1) 增加控制器增益:适当增加控制器的增益可以提高系统的响应速度和稳定性,减小超调量。
(2) 设计合适的控制器:选择合适的控制器类型和参数可以优化系统的动态响应特性。
例如,比例控制器对于快速响应非常有效,而积分控制器可以消除稳态误差。
(3) 使用反馈控制:引入反馈控制可以提高系统的稳定性和响应速度。
通过测量输出信号并与期望值进行比较,可以调节系统的输入信号,从而实现更准确的控制。
控制器对系统动态响应特性的影响
1、P控制器只改变系统的增益而不影响相位,他对系统的影响主要反映在系统
的稳态误差和稳定性上,增大比例系数可提高系统的开环增益,减小系统的稳态误差,从而提高系统的控制精度,但这会降低系统的相对稳定性,甚至可能造成闭环系统的不稳定。
2、PI控制器消除或减小系统的稳态误差,改善系统的稳态性能
3、PID控制通过积分作用消除误差,而积分控制可缩小超调量,加快反应,是综合了PI控制与PD控制长处并去除其短处的控制,从频域角度看,PID控制通过积分作用于系统的低频段,以提高系统的稳定性,而微分作用于系统的中频段,以改善系统的动态性能。
PID控制器的动态特性
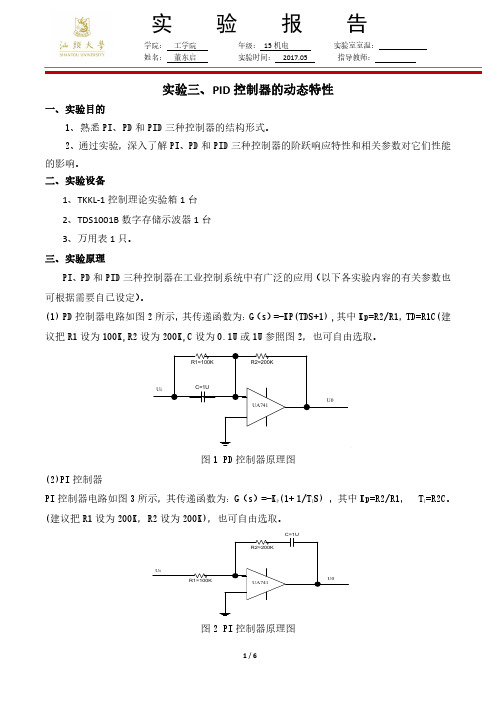
实验三、PID 控制器的动态特性一、实验目的1、熟悉PI 、PD 和PID 三种控制器的结构形式。
2、通过实验,深入了解PI 、PD 和PID 三种控制器的阶跃响应特性和相关参数对它们性能的影响。
二、实验设备1、TKKL-1控制理论实验箱1台2、TDS1001B 数字存储示波器1台3、万用表1只。
三、实验原理PI 、PD 和PID 三种控制器在工业控制系统中有广泛的应用(以下各实验内容的有关参数也可根据需要自己设定)。
(1) PD 控制器电路如图2所示,其传递函数为:G (s )=-KP(TDS+1) ,其中Kp=R2/R1,TD=R1C(建议把R1设为100K,R2设为200K,C 设为0.1U 或1U参照图2,也可自由选取。
图1 PD 控制器原理图(2)PI 控制器PI 控制器电路如图3所示,其传递函数为:G (s )=-K P (1+ 1/T I S) ,其中Kp=R2/R1, T I =R2C 。
(建议把R1设为200K ,R2设为200K),也可自由选取。
图2 PI 控制器原理图(3)PID 控制器如图4所示,其传递函数为:G (s )=-KP(1+ 1/TIS+ TDS) ,其中, , Ti=R1C2,Kp=()/Ti , ,TD=()/()图3 PID 控制器原理图四、实验内容1、按其原理图连线,令Ur=1V ,C=1uF,用示波器分别测试R1=100K 和R2为200K 时(或R1=200K 和R2为200K 时)的PD 控制器的输出波形(PD 控制器的有关参数也可根据实验条件自己选择合适的参数)。
2、令Ur=1V ,C=1uF ,用示波器分别测试R1=100K 和R2=200K 时(或R1=200K 和R2=200K 时)的PI 控制器的输出波形(PI 控制器的有关参数也可根据实验条件自己选择合适的参数)。
3、令Ur=1V ,设计PID 控制器的有关参数,并用示波器测试PID 控制器的输出波形。
控制系统的动态和静态性能指标

04
动态与静态性能指标的关系
相互影响
动态性能指标
描述系统在外部扰动或输入变化时的响应特性,如超调量、 调节时间、振荡频率等。
静态性能指标
描述系统在稳态下的输出响应特性,如稳态误差、静态精 度等。
相互影响
动态性能和静态性能之间存在相互影响,良好的动态性能 可以减小稳态误差,提高系统的静态性能;反之,良好的 静态性能也可以改善系统的动态性能。
参数调整
通过调整系统参数,如增益、时间常数等,可以优化系统的动态和 静态性能。
鲁棒性
考虑系统在不同工况下的鲁棒性,以确保在各种条件下都能保持良 好的性能。
05
性能指标的测试与评估
测试方法
实验法
通过在真实环境中对控制系统进行实验,收集数据并 分析其性能表现。
பைடு நூலகம்仿真法
利用计算机仿真技术模拟控制系统的运行,以便在实 验室条件下测试性能指标。
稳定性分析方法
稳定性分析方法包括频域分析和时域分析两种方法。频域分析方法通过分析系统的极点和 零点来评估系统的稳定性,而时域分析方法则通过解微分方程来计算系统的状态响应。
快速性
01
快速性的定义
快速性是指控制系统在达到稳定状态时所需的时间长短。如果一个系统
具有较快的响应速度,那么系统在受到扰动后能够迅速恢复到平衡状态。
控制系统的组成
控制器
控制系统的核心部分,负责接收 输入信号并根据控制算法产生输 出信号,以控制受控对象的输出。
受控对象
被控制的物理系统或设备,其输出 被反馈回控制器以进行比较和调整。
反馈回路
将受控对象的输出信号反馈回控制 器,以便控制器能够根据偏差进行 调整。
控制系统的分类
电液伺服系统的建模与控制

电液伺服系统的建模与控制1. 引言电液伺服系统是一种广泛应用于工业控制领域的系统,它可以通过控制液压执行器的输出来实现对机械运动的精确控制。
本文将介绍电液伺服系统的建模与控制方法,以帮助读者更好地了解和应用这一技术。
2. 电液伺服系统的概述电液伺服系统由液压执行器、电液伺服阀、传感器和控制器等组成。
液压执行器负责将液压能转化为机械能,电液伺服阀负责控制液压执行器的动作,传感器用于反馈系统状态信息,控制器根据传感器的反馈信息对电液伺服阀进行控制。
3. 电液伺服系统的建模建模是控制系统设计的第一步,对于电液伺服系统也是不可或缺的。
电液伺服系统的建模既可以基于理论模型,也可以基于实验数据进行。
3.1 理论模型在理论模型建模中,我们需要考虑液压执行器、电液伺服阀和控制器的动态特性。
液压执行器的动态特性可以用惯性、摩擦、密封等参数来描述。
电液伺服阀的动态特性可以用阀门的流量-压力特性和阀门饱和现象来描述。
控制器的动态特性通常可以用传统的PID控制算法进行建模。
3.2 实验模型在实验模型建模中,我们需要通过实验得到系统的频率响应和传递函数,并将其转化为数学模型。
这种方法对于实际系统的建模更加准确,但也需要大量的实验数据和较高的技术要求。
4. 电液伺服系统的控制控制是电液伺服系统中最关键的环节之一。
常用的电液伺服系统控制方法有位置控制、速度控制和力控制等。
4.1 位置控制位置控制是电液伺服系统中最基本的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的位置。
传感器将执行器的位置信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的位置跟踪。
4.2 速度控制速度控制是电液伺服系统中常用的控制方法之一。
通过控制电液伺服阀的输出来控制液压执行器的速度。
传感器将执行器的速度信息反馈给控制器,控制器根据反馈信息进行调节,使得系统实现期望的速度跟踪。
4.3 力控制力控制是电液伺服系统中一种高级的控制方法。
运动控制系统中的动态特性分析与优化

运动控制系统中的动态特性分析与优化运动控制系统是现代自动化领域中非常重要的一个研究领域,它的优化对于提高系统性能、提高生产效率、降低能耗等方面都具有重要意义。
本文将着重探讨运动控制系统中的动态特性分析与优化。
一、运动控制系统的动态特性分析运动控制系统的动态特性是指系统响应过程中的时间特性、频率特性、稳定性等方面内容。
对于设计和优化运动控制系统,深入理解和分析其动态特性是非常关键的。
1.1 系统时间特性分析在运动控制系统中,常常需要对系统的时间特性进行分析。
其中一个重要的参数是系统的响应时间,它体现了系统从接受输入信号到产生输出响应所需要的时间。
较短的响应时间能够提高系统的动态性能,提高系统的响应速度。
因此,在系统设计和优化中,需要对系统的响应时间进行合理的要求和调整。
1.2 系统频率特性分析在运动控制系统中,频率特性是指系统在不同频率下对输入信号的响应情况。
频率特性的分析对于系统的稳定性和抗干扰能力有着重要影响。
通过对系统频率特性的分析,可以确定系统的带宽和截止频率等参数,进而对系统进行优化。
1.3 系统稳定性分析系统的稳定性是指系统在输入信号变化或干扰下的抗干扰能力。
系统稳定性分析是运动控制系统设计和优化的一个关键环节。
通过对系统稳定性的分析,可以评估系统的稳定性能力,进而采取合适的控制策略进行优化。
二、运动控制系统的优化方法与技术针对运动控制系统的动态特性进行优化是提高系统性能的有效手段。
下面将介绍一些常用的优化方法与技术。
2.1 PID控制算法优化PID控制算法是运动控制系统中常用的控制方法之一。
通过对PID控制算法的参数进行优化调整,可以提高系统的响应速度和稳定性。
常用的PID控制器参数优化方法包括遗传算法、模拟退火算法等。
2.2 模型预测控制优化模型预测控制是一种优化控制方法,通过建立系统的数学模型并预测系统的未来状态,进而制定合适的控制策略。
模型预测控制在运动控制系统中有着广泛的应用,通过优化预测模型和控制算法,可以提高系统的动态性能。
如何根据伺服系统的工作特点调整PID参数
如何根据伺服系统的工作特点调整PID参数伺服系统是一种智能控制系统,通常包括传感器、执行器、控制电路等组成部分。
其主要作用是使用反馈信息来控制执行器的移动,以达到精确的位置、速度和力量控制。
PID参数是伺服系统中最重要的参数之一。
在这篇文章中,我们将讨论如何根据伺服系统的工作特点来调整PID参数。
一、PID参数的介绍PID控制器是一种普遍使用的闭环反馈控制算法,它通过比较给定值(设定值)和实际输出来计算误差,然后将误差传递给控制器,通过控制执行器来减小误差。
PID控制器通常由三个部分组成:比例项P,积分项I和微分项D。
它们的作用分别是:P项:根据误差的大小来直接控制输出变化的速度。
I项:通过积累过去时间内的误差来控制输出。
D项:根据误差的变化速度来控制输出。
PID控制器的输出与PID参数的选择方式有关。
通常情况下,直接调整PID参数是不够的,需要了解伺服系统的工作特点,以便调整PID参数以获得更好的性能。
二、伺服系统的工作特点伺服系统的工作特点主要包括三个方面:静态特性、动态特性和稳态误差特性。
静态特性是指在给定输入信号下的系统输出响应,它通常由系统的增益和时间常数等参数确定。
在静态响应中,输出与输入成比例,并且比例系数由系统的增益确定。
时间常数则代表了系统响应的时间,即系统从初始状态到达稳定状态所需的时间。
动态特性是指系统的快速性和稳定性。
快速性是指系统响应速度的快慢。
在伺服系统中,快速性对精度和响应速度有重要影响。
稳定性是指系统在不断变化的环境中能够保持稳定的能力,即系统输出的波动性和稳定性。
稳态误差特性是指当系统到达稳定状态后,误差仍然存在的大小。
在伺服系统中,稳态误差可能会导致不准确的位置和力量控制。
三、根据伺服系统的工作特点调整PID参数在调整PID参数之前,需要了解伺服系统的工作特点,并根据实际应用来确定PID参数的选择方式。
1. 调整比例项P在伺服系统中,比例项P主要影响系统的快速性。