光源自动跟踪系统设计系统建模
基于ARM的光源跟踪系统的设计

信 号 ,采 用 交错 技 术 可 以显 著提 高 升压 转 换效 率 , 利 用其输 出 电流峰 值可 达 l A和 可调 的 P WM 输 出
来驱动 L D灯 ,实现亮度可调节的光源发射。 E
踪技术受 到越 来越 多的关注 ,该技 术可应用于太阳 自动跟 踪等领 域 ,使 太阳能的利用率和吸收率更高 。 12检 测 部 分 . 传统的光源跟踪技术多 以单 片机 为控制核 心 ,其 检 测 部 分是 整 个 系统 的关键 ,决 定 了系统 跟 踪 的精 确度 ,电路 图如图 2所示 ,由 5 光敏三极 个 管组成 ,其灵 敏度和稳 定性好 ,分别置 于可沿 固定 轴 翻转运 动的平 台上 ,形 成 10 2 。圆弧形 切面 ,激
极管采集 、经放大和比较后 的光 源信号 ,控 制步进电机带动跟踪平 台运动 ,结合软件进行 相关 算法的运算控
制最 终实现对点光源 的 自动跟踪 。通过对 亮度 可调的光源发 生装置模拟太阳光照进行 的跟踪实验 ,结果表 明 该系统较传统 的单片机控制在跟踪速度和精度方面有很大提升 。
关键词: 光源跟踪 ;L S 1 ;步进 电机 M3 8 1 中图分类号 :T 2 3 文献标识码 :A P7
s s m S St e ARM co o to e M 3 8 a h o to o e r c s st e l h in lwh c o lc e y t e yt e U e h mir c n r U rL S 1 st e c n r lc r ;p o es h g ts a i h c l td b h 1 e i g e
点光源追踪系统设计
点光 源追 踪 系统 设 计 米
李 超 王再 明 甘 铭 韦稳稳 刘 刚
( 石理 工 学 院 电气 与 电子 信 息工程 学 院 , 北 黄 石 450 ) 黄 湖 30 3
摘 要 : 旨在设计一个模拟强点光源追踪装置 , 以提高光源 的利用率 。装置 由模 拟强光源和光 源追 踪2 部分构成。模拟强光源装置采用 T 公司的 L 37组成可调恒流源装置控制 1W 高亮度 L D光 I M 1 E 源, 并且使用电阻分流和 MS4 0 4 P3 f 7内部 A C采样数显 。追踪装置采用 A m l 1 D T e 公司的 A m gl T ea6高 性能 A R单 片机作为主控芯片 , V 将采集到的信号进行综合判别和处理 , 然后控制舵机实现对光 源的 跟踪 , 并可实现手动校准 。 关 键词 : 点光源 ; 跟踪系统 ; 光敏 电阻 ;T ea6 A m g1
注, 如何 提高太 阳能资源 的利用效 率 已经成 为 当今 世 界 能 源 行 业 重 要 的 话 题 。本 系 统 旨 在 设 计 一 个 模 拟 强 点 光 源 追 踪 装 置 , 提 高 光 源 以
的利用率 。装 置 由模 拟 强 光 源 和光 源追 踪 2 部分 构 成 。模 拟 强 光 源装 置 采 用 , I ' 司 的 I公 L 1 M3 7组 成 可 调 恒 流 源 装 置 控 制 1W 高 亮 度
L C a WA / ho NG i n Za mig
G N A
WEI We we L U n n n I Ga g
(co eraa er iIo ao Egei , un hIt toT hog, u g i ue450) S ooE ciln E tn fmtn nn rg Ha s su no H a s b 03 h lflt d l o cn r i ien c c g ini ef e ly n hH i3 t c
光伏发电光源跟踪控制系统设计
光伏发电光源跟踪控制系统设计摘要:本系统设计方案是基于单片机完成的, 该设计使用光敏三极管来检视太阳光源的位置,并将信号传输给单片机,经过单片机的操作和处理来将光源位置传输同步给步进电机,步进电机将驱动太阳能电池板与太阳光源垂直,使其跟随光源运动。
同时将光敏传感器检测的信号显示在液晶屏幕上。
关键词:光源;单片机;传感器1、引言由于现代社会新能源的发展较为缓慢,新能源呼声成为当前科学家研究的出发点,如太阳能和风能。
而其中太阳能源最能引起科学家的研究和利用,太阳能光源的可再生能源就成为许多科学家注意力和研究的焦点。
光作为地球上一种可再生的新型能源,相比其他能源,其主要特点是环保清洁,但是由于太阳照射在地球上有着分布不均,随着时间的变化光照强度会产生变化等特点,就会导致大部分的设备对光的利用率大大降低,我们所能利用的仅仅是其中的一小部分。
因此,光源跟踪可以自动且不需要让人为干预的跟踪太阳的位置,加强了对光的利用。
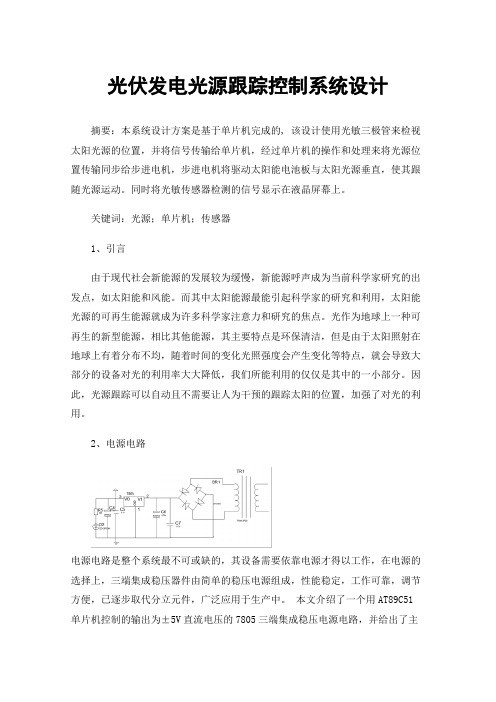
2、电源电路电源电路是整个系统最不可或缺的,其设备需要依靠电源才得以工作,在电源的选择上,三端集成稳压器件由简单的稳压电源组成,性能稳定,工作可靠,调节方便,已逐步取代分立元件,广泛应用于生产中。
本文介绍了一个用AT89C51单片机控制的输出为±5V直流电压的7805三端集成稳压电源电路,并给出了主要器件的型号及参数。
该稳压电源适用于各种电子设备的供电。
由于它是一个小系统,我们使TRAN-2P2S电源供电+5V稳压电压。
3、液晶显示电路液晶显示电路采用LCD1602,是目前使用最多的液晶显示器之一。
它是由字符型液晶显示屏。
显示单元和控制电路组成的一个有机整体。
由于该装置采用了独特的技术,所以具有体积小,重量轻,功耗低,寿命长,可靠性高等特点。
本文对该电路作一些介绍。
控制驱动主电路HD44780及其扩展驱动电路HD44100,它的内部元件有很少的电阻分部,而在主板上却构成电容元件、电阻等元件。
点光源跟踪系统设计

moos r elsr e s n c uaep s inn . M3 tpc l o s n—urn o recrutmpe ne dutbe tr i e n da c lt o io ig L ia c nt t re t uc i ii lme tsaj s l dv a p a t 1 y 7 a c s c a so et du t E g t i —5 mA. h oess m eyg o o ltdwi i ese i e a g a kn c p a js L D l hs n1 03 0 o i 5 T ewh l y t i v r o dc mpe t nt p cf drn et c ig e s e h h i r
1 引言
文 中设计 的系统 是源 自于 2 1 0 0年 T 杯湖北省 电子 I 设计 大赛 , 要 求是设计 并制作 一个 能够检 测并指 示点 光源位置 的光源 跟踪 系统 ,系统示意 图如 图 1 所示 。光 源 B使用单只 1 白光 L D,固定在一支架上 。L D的 W E E 电流能够在 1 0 3 0 mA 5 5 mA 的范 围内调节 。初始状 态 下光 源 中心线与 支架 间的夹角约为 6 。 光源距地 面 0,
a d p n i h o r e i rg t e sc a g s i a o d a a t b lt . n oi tlg ts u c n b i h n s h n e , th s g o d p a iiy KEY ORD S t p i g mo o ; S 4 0 h t c n u tv e it n e c n t n — u r n o r e W :se p n t r M P 3 ;p O O O d c i e r s s a c ; o s a tc r e ts u c
点光源跟踪系统设计方案
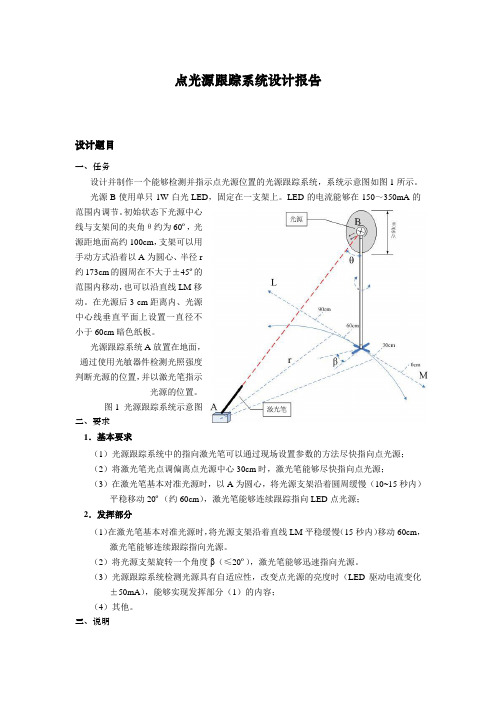
点光源跟踪系统设计报告设计题目一、任务设计并制作一个能够检测并指示点光源位置的光源跟踪系统,系统示意图如图1所示。
光源B使用单只1W白光LED,固定在一支架上。
LED的电流能够在150~350mA的范围内调节。
初始状态下光源中心线与支架间的夹角θ约为60º,光源距地面高约100cm,支架可以用手动方式沿着以A为圆心、半径r约173cm的圆周在不大于±45º的范围内移动,也可以沿直线LM移动。
在光源后3 cm距离内、光源中心线垂直平面上设置一直径不小于60cm暗色纸板。
光源跟踪系统A放置在地面,通过使用光敏器件检测光照强度判断光源的位置,并以激光笔指示光源的位置。
图1 光源跟踪系统示意图二、要求1.基本要求(1)光源跟踪系统中的指向激光笔可以通过现场设置参数的方法尽快指向点光源;(2)将激光笔光点调偏离点光源中心30cm时,激光笔能够尽快指向点光源;(3)在激光笔基本对准光源时,以A为圆心,将光源支架沿着圆周缓慢(10~15秒内)平稳移动20º(约60cm),激光笔能够连续跟踪指向LED点光源;2.发挥部分(1)在激光笔基本对准光源时,将光源支架沿着直线LM平稳缓慢(15秒内)移动60cm,激光笔能够连续跟踪指向光源。
(2)将光源支架旋转一个角度β(≤20º),激光笔能够迅速指向光源。
(3)光源跟踪系统检测光源具有自适应性,改变点光源的亮度时(LED驱动电流变化±50mA),能够实现发挥部分(1)的内容;(4)其他。
三、说明1.作为光源的LED的电流应该能够调整并可测量;2.测试现场为正常室内光照,跟踪系统A不正对直射阳光和强光源;3.系统测光部件应该包含在光源跟踪系统A中;4.光源跟踪系统在寻找跟踪点光源的过程中,不得人为干预光源跟踪系统的工作;5.除发挥部分(3)项目外,点光源的电流应为300±15 m A;6.在进行发挥部分(3)项测试时,不得改变光源跟踪系统的电路参数或工作模式;四、评分标准设计报告项目分数系统方案 2 理论分析与计算8 电路与程序设计9 测试方案与测试结果8 设计报告结构及规范性 3小计30基本要求完成第(1)项10 完成第(2)项20 完成第(3)项20小计50发挥部分完成第(1)项15 完成第(2)项15 完成第(3)项15 其他 5小计50总分130设计总方案一:系统概述本设计是一个点光源追踪系统,主要由传感器来对光照检测与处理,控制器分析与处理,执行机构运行和模块显示这几个部分构成。
点光源跟踪器系统设计
点光源跟踪系统组员:王立冬卢晓文许甲海摘要:本文设计的是一个点光源跟踪系统,主要由光敏三极管的照度检测与处理,控制器分析与处理,执行机构运行和液晶显示模块这几个部分构成。
整个系统是以LM3S1138为控制核心,通过八个个光敏三极管来检测光照,依据光照度的变化、大小来判断出点光源的位置与运动趋势,并将点光源运动分解为水平和竖直方向的二维运动,借以来控制水平电机与竖直电机的旋转角度,以达到跟踪光源的效果。
关键词:点光源定位,二维运动分析,LM3S1138一、系统方案设计与论证1.主控芯片根据本题的要求,整个系统中必须要有一个主控芯片来处理数据和控制操作,主要考虑以下两种方案:方案一:MSP430系列单片机。
16位低功耗单片机,性能良好。
方案二:Cortex-M3系列。
具有32位处理器内核的高性能处理器,具有强大的控制、处理能力,丰富的外围模块,稳定的系统,提供方便高效的开发环境。
本系统选取Cortex-M3系列的LM3S1138作为控制器,LM3S1138支持低功耗模式,性能稳定,内置嵌套向量中断控制器,在控制、处理数据速度上有优势,并含有丰富的外围模块,所以选择方案二。
2.传感器的选择本系统的传感器主要是检测光照度,可考虑的传感器如下列方案:方案一:光敏电阻。
从光照特性来看,随着光照强度的增加,光敏电阻的阻值开始迅速下降,可以反映光照的变化,但该特性大多数情况为非线性,部分光照区间内,特性变化不灵敏。
方案二:硅光电池。
硅光电池是一种直接把光能转换为电能的半导体器件,根据硅光电池光照强度曲线特性可知,硅光电池的开路电压或短路电流与光强成很好的线性关系。
方案三:光敏二极管。
光敏二极管具有单向导电性,无光照时,有很小的暗电流,当受到光照时,光电流随射光强度的变化而变化。
方案四:光敏三极管。
原理与光敏二极管相同,但是与光敏二极管相比,它具有很大的光电流放大作用,即很高的灵敏度,因此传感器选择方案四。
3.电机的选择电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:方案一:步进电机。
光源自动跟踪系统设计报告1
题目光源自动跟踪系统组别第三组姓名农世安、黄勇深、廖晓系(院)信息工程系班级 11应用电子(3+2)指导教师龙祖连、倪杰、张存吉二O一二年九月三日光源自动跟踪系统要摘本设计以TI公司提供的16位超低功耗、高性能嵌入式微控制器MSP430为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统。
循迹小车沿半径r =80cm的半圆黑色循迹线(线宽20mm)自C点运动到D点,在D点停留5S后关掉LED灯并自动返回C点,表示一天周期的结束。
放置在地面的光源跟踪系统,通过运用光敏器件的检测、传感器、AT89S52单片机的强大功能及相关外围电路设计产生控制信号传递给步进电机,使步进电机带动激光笔进行左、右等方向进行光源的实时检测及精确的跟踪。
本文着重讨论电机控制与光源检测定位方法。
关键字光源检测及跟踪光敏器件步进电机目录一、引言 (4)任务与要求 (4)二、方案的选择与论证 (5)1、微控制器模块的选择与论证 (6)2、光敏元器件的选择与论证 (7)3、电机的选择与论证 (8)4、电机驱动模块的选择与论证 (9)5、显示模块的选择与论证 (9)6、方案确认 (10)7、方案论证 (10)三、系统总体设置 (11)1、系统硬件流程图 (11)2、系统软件流程图 (12)四、系统单元设计 (14)1、单片机最小系统 (14)2、电源电路 (15)3、黑白线检测模块 (16)4、电机驱动模块 (16)五、系统总体测试 (17)六、总结 (17)一、引言.任务与要求:设计并制作一个能够检测并指示点光源位置的模拟光伏发电太阳光自动跟踪系统,系统示意图如图1所示。
光源B使用单只1W白光LED(不得使用任何聚光装置),固定在一可调速循迹小车上,循迹小车沿半径r =80cm 的半圆黑色循迹线(线宽20mm)自C点运动到D点,在D 点停留5S后关掉LED灯并自动返回C点,表示一天周期的结束。
循迹小车的速度以自C点运动到D点的时间为20~50S 可调节。
基于51单片机点光源自动跟踪系统设计
指导教师评定成绩:审定成绩:重庆邮电大学自动化学院综合设计报告设计题目:基于单片机的光源自适应控制系统设计单位(二级学院):自动化学院学生姓名:专业:自动化班级:学号:指导教师:蒋建春设计时间: 2012 年 10 月重庆邮电学院自动化学院制摘要本设计给出了一种基于单片机的点光源自动跟踪系统设计方案, 该设计使用TI公司的超低功耗的AT89C52单片机作为整个系统的控制核心,主要由电机驱动模块,点光源检测模块,电源转换模块等模块组成。
利用8路光敏电阻来检测点光源的位置并将检测到的信号经过放大后进行AD转换,将转换的结果传给控制器AT89C52单片机,经过过单片机的运算和处理来确定点光源的运动趋势,并将运算的控制信号控制两台步进电机,使其跟随点光源运动。
本设计可以扩展为以后的太阳能发电的自动跟踪系统。
该系统不仅能自动根据太阳光方向来调整太阳能电池板朝向, 结构简单、成本低, 而且在跟踪过程中能自动记忆和更正不同时间的坐标位置, 不必人工干预, 特别适合天气变化比较复杂和无人值守的情况, 有效地提高了太阳能的利用率, 有较好的推广应用价值。
关键词:AT89C52单片机,光源,自动跟踪,传感器目录摘要............................................... 错误!未定义书签。
目录. (3)一设计题目 (4)1.1 基于单片机的光源自适应控制系统设计 (4)1.2 设计要求 (4)二设计报告正文 (5)2.1 设计方案总体方向的选择 (5)2.1.1 系统方案的拟定 (5)2.1.2 方案选择 (5)2.2 硬件电路的设计 (6)2.2.1 A/D转换模块 (6)2.2.2 步进电机模块 (9)2.2.3 电机驱动模块 (11)2.2.4 检测模块 (13)2.2.5 单片机模块 (14)2.3 系统软件设计 (18)三总体调试 (19)3.1 总体调试 (19)3.2 问题及解决方案 (19)3.2.1 通道比较阀值的设置 (19)3.2.2 电机的防抖 (19)四设计总结 (20)五参考文献 (21)六附录 (22)一、设计题目1.1基于单片机的光源自适应控制系统设计设计一控制系统,假设有一个太阳能电池板,为了使电池板最大限度的接受光照强度,通过控制器调节电池板的角度使电池板始终正对光线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光源自动跟踪系统设计系统建模
一、引言
光源自动跟踪系统是一种能够自动调节光源方向的系统,可以在不同
的环境下保持照明效果稳定,提高照明效率和舒适度。
本文将介绍该
系统的设计和建模。
二、系统设计
1. 系统组成
光源自动跟踪系统由传感器、控制器和执行器三部分组成。
传感器负
责检测环境亮度和人体位置,控制器根据传感器反馈的信息计算出最
优的光源方向指令,执行器则根据指令调节光源方向。
2. 传感器选择
为了实现对环境亮度和人体位置的检测,我们选择了光敏电阻和红外
传感器作为传感器。
光敏电阻可以检测环境亮度,并将其转化为电信
号输出;红外传感器可以检测人体位置,并将其转化为数字信号输出。
3. 控制算法
控制算法是整个系统的核心部分,它决定了最终的光源方向。
我们采
用PID控制算法来实现自动跟踪功能。
PID控制算法通过比较目标值
与实际值之间的误差来调整输出量,从而实现对光源方向的控制。
4. 执行器选择
为了实现对光源方向的调节,我们选择了舵机作为执行器。
舵机可以
根据输入的PWM信号调整自身角度,从而实现对光源方向的调节。
三、系统建模
1. 传感器模型
光敏电阻和红外传感器都可以用简单的数学模型来描述。
光敏电阻的
输出电压与环境亮度成反比,可以用以下公式表示:
V = K / L
其中V为输出电压,K为常数,L为环境亮度。
红外传感器可以将人体位置转化为数字信号输出。
我们假设人体位置
在传感器正前方时输出最大值,离开传感器越远输出越小,并且在一
定范围内保持线性关系。
因此,红外传感器的数学模型可以表示为:
D = K * (1 - |x| / L)
其中D为数字输出值,K、L为常数,x表示人体位置与传感器正前方的距离。
2. 控制算法模型
PID控制算法是一种经典的控制算法,在工业自动化领域得到广泛应用。
其基本原理是通过比较目标值和实际值之间的误差来调整输出量,从而实现对被控对象的控制。
PID控制算法可以用以下公式表示:
u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t) / dt
其中u(t)为输出量,e(t)为误差,Kp、Ki、Kd分别为比例、积分、微分系数。
3. 执行器模型
舵机是一种常见的执行器,其工作原理是通过输入PWM信号来调节自身角度。
舵机的数学模型可以表示为:
θ = Kp * PWM + θ0
其中θ为舵机角度,PWM为输入信号占空比,Kp、θ0为常数。
四、总结
光源自动跟踪系统是一种能够自动调节光源方向的系统,可以在不同的环境下保持照明效果稳定。
本文介绍了该系统的设计和建模过程,包括传感器选择、控制算法设计和执行器选择等方面。
通过对系统进行建模和仿真分析,可以有效地优化系统参数和性能,提高照明效率和舒适度。