点光源跟踪系统
基于ARM的光源跟踪系统的设计

信 号 ,采 用 交错 技 术 可 以显 著提 高 升压 转 换效 率 , 利 用其输 出 电流峰 值可 达 l A和 可调 的 P WM 输 出
来驱动 L D灯 ,实现亮度可调节的光源发射。 E
踪技术受 到越 来越 多的关注 ,该技 术可应用于太阳 自动跟 踪等领 域 ,使 太阳能的利用率和吸收率更高 。 12检 测 部 分 . 传统的光源跟踪技术多 以单 片机 为控制核 心 ,其 检 测 部 分是 整 个 系统 的关键 ,决 定 了系统 跟 踪 的精 确度 ,电路 图如图 2所示 ,由 5 光敏三极 个 管组成 ,其灵 敏度和稳 定性好 ,分别置 于可沿 固定 轴 翻转运 动的平 台上 ,形 成 10 2 。圆弧形 切面 ,激
极管采集 、经放大和比较后 的光 源信号 ,控 制步进电机带动跟踪平 台运动 ,结合软件进行 相关 算法的运算控
制最 终实现对点光源 的 自动跟踪 。通过对 亮度 可调的光源发 生装置模拟太阳光照进行 的跟踪实验 ,结果表 明 该系统较传统 的单片机控制在跟踪速度和精度方面有很大提升 。
关键词: 光源跟踪 ;L S 1 ;步进 电机 M3 8 1 中图分类号 :T 2 3 文献标识码 :A P7
s s m S St e ARM co o to e M 3 8 a h o to o e r c s st e l h in lwh c o lc e y t e yt e U e h mir c n r U rL S 1 st e c n r lc r ;p o es h g ts a i h c l td b h 1 e i g e
点光源追踪系统设计
点光 源追 踪 系统 设 计 米
李 超 王再 明 甘 铭 韦稳稳 刘 刚
( 石理 工 学 院 电气 与 电子 信 息工程 学 院 , 北 黄 石 450 ) 黄 湖 30 3
摘 要 : 旨在设计一个模拟强点光源追踪装置 , 以提高光源 的利用率 。装置 由模 拟强光源和光 源追 踪2 部分构成。模拟强光源装置采用 T 公司的 L 37组成可调恒流源装置控制 1W 高亮度 L D光 I M 1 E 源, 并且使用电阻分流和 MS4 0 4 P3 f 7内部 A C采样数显 。追踪装置采用 A m l 1 D T e 公司的 A m gl T ea6高 性能 A R单 片机作为主控芯片 , V 将采集到的信号进行综合判别和处理 , 然后控制舵机实现对光 源的 跟踪 , 并可实现手动校准 。 关 键词 : 点光源 ; 跟踪系统 ; 光敏 电阻 ;T ea6 A m g1
注, 如何 提高太 阳能资源 的利用效 率 已经成 为 当今 世 界 能 源 行 业 重 要 的 话 题 。本 系 统 旨 在 设 计 一 个 模 拟 强 点 光 源 追 踪 装 置 , 提 高 光 源 以
的利用率 。装 置 由模 拟 强 光 源 和光 源追 踪 2 部分 构 成 。模 拟 强 光 源装 置 采 用 , I ' 司 的 I公 L 1 M3 7组 成 可 调 恒 流 源 装 置 控 制 1W 高 亮 度
L C a WA / ho NG i n Za mig
G N A
WEI We we L U n n n I Ga g
(co eraa er iIo ao Egei , un hIt toT hog, u g i ue450) S ooE ciln E tn fmtn nn rg Ha s su no H a s b 03 h lflt d l o cn r i ien c c g ini ef e ly n hH i3 t c
光电追踪系统的设计原理和实践

光电追踪系统的设计原理和实践光电追踪系统的设计原理和实践光电追踪系统是一种基于光电传感器和追踪算法的系统,可以实时监测和跟踪目标物体的运动轨迹。
它在许多领域有着广泛的应用,如自动驾驶、机器人导航和安防监控等。
本文将介绍光电追踪系统的设计原理和实践。
光电追踪系统的设计原理主要包括硬件和软件两个方面。
在硬件方面,系统使用光电传感器来接收光信号,并将其转换为电信号。
光电传感器通常采用光敏电阻、光电二极管或光电三极管等。
通过合理的电路设计和信号放大,可以提高光电传感器的灵敏度和抗干扰能力。
在软件方面,光电追踪系统需要进行目标的检测、识别和跟踪。
目标检测是指在图像或视频中找到目标物体的位置和大小。
常用的目标检测算法有Haar特征检测、HOG特征检测和深度学习等。
一旦目标被检测到,系统会使用跟踪算法来实时跟踪目标的位置和运动轨迹。
常见的跟踪算法有卡尔曼滤波、粒子滤波和相关滤波等。
这些算法可以根据目标的运动特征和环境条件,实现快速准确的目标跟踪。
在实践中,光电追踪系统的应用非常广泛。
例如,在自动驾驶中,光电追踪系统可以实时跟踪周围车辆和行人的位置和速度,从而实现自动驾驶车辆的安全行驶。
在机器人导航中,光电追踪系统可以帮助机器人识别和跟踪目标位置,实现自主导航和定位。
在安防监控中,光电追踪系统可以实时监测和跟踪可疑人员或物体的移动轨迹,提高安全性和保护效果。
然而,光电追踪系统也面临一些挑战和限制。
首先,光电传感器的灵敏度和分辨率会影响系统的跟踪精度和速度。
其次,环境因素如光照、背景干扰和目标遮挡等,也会对系统的性能产生影响。
此外,系统的实时性和算法的复杂度也是需要考虑的因素。
总结来说,光电追踪系统是一种基于光电传感器和追踪算法的系统,可以实现目标的实时监测和跟踪。
通过合理的设计原理和实践,光电追踪系统在许多领域有着广泛的应用。
然而,系统还面临一些挑战和限制,需要进一步研究和改进。
希望随着技术的发展和创新,光电追踪系统能够在更多的领域发挥其重要作用。
舞台灯光系统中追光灯自动跟踪功能的实现
舞台灯光系统中追光灯自动跟踪功能的实现 Document serial number【KKGB-LBS98YT-BS8CB-BSUT-BST108】舞台灯光系统中追光灯自动跟踪功能的实现摘要:追光灯作为一种重要的灯光配置,直接影响到舞台的艺术效果。
本文介绍的舞台灯光控制系统实现了舞台上利用追光灯来跟踪演员的移动。
该系统的实现很好地完成灯光随动功能,降低演出成本,节省人力、物力,完善舞台灯光技术中追光灯的功能和自动化控制的程度。
文章介绍了舞台中追光灯控制系统的设计方案的原理、总体结构及特点,并对该系统开发中的一些技术上的实现进行了详细阐述。
关键字:舞台灯光系统追光灯鼠标摄像头TheRealizationofAutomaticTrackingFunctionofTheSpotlightLampinStageLightingSystemAbstract:Thespotlightlamp,asanimportantlightingconfiguration,directlyaffectsthe artisticeffectsofstage.Thecontrollingsystemofstagelightingintroducedin thisarticleachievestotracktheactors’movement bytheuseofthespotlightlam p.Therealizationofthissystemcanfinishtrackingfunctionwell,andcanreduce theperformancecost,andcansavehumanresourcesandmaterialresources.Italso canimprovedthefunctionofthespotlightlampinstagelightingskillsandtheaut omaticdegree.Thisarticleintroducestheprinciple,theoverallstructureandc haracteristicsofthedesigningproposalofthestagelightingcontrollingsyste m.Italsogivesadetailedintroductionabouttherealizationofsomeskillsinthe systemdeveloping.Keyword:SystemofstagelightingThespotlightlampMouseCamera1概述追光灯的运用是舞台艺术中不可或缺的重要手段,达到突出重点、塑造人物形象、烘托环境气氛的目的。
基于LM3S811单片机的LED点光源跟踪系统的设计

Ke o d y w r s: L 3 1sn l—hp m ir c mp tr ED p i ts u c ;a t mai rc n y tm ;lsr p n M S8 igec i c o o u e ;L on o re u o t ta kig s se 1 c ae e
t s t he ys em c m akc he as r an t l e pe m ove n a l n i l di e tons r ci qui ckl a y nd c ntnuous y t r lz t o i l o ea i e he
t a k n o t e p i O r e w h n h o nt S U C o e l w l n s o hl a o g a c r l n r c i g f h o nt S U C e t e p i O r e m v s s o Y a d mo t y l n ic e a d s r i ht ln i a c r a n n l n it n e. t a g i e 1 e t i a g e a d d s a c 3 _
设 计 并实 现 了 ‘ 点光 源 自动 跟踪 系 统 . 个
崔 鸣 ,尚 丽
( 州 市职 业 大 学 电子信 息工 程 系 ,江 苏 苏州 2 5 0 ) 苏 1 14
摘
要 : 以T公 司的超低功耗 M U M S 1 单 片机 为核 心控 制 器, I C L 6 8 1 设计 并制作 了一 个L D E 点光 源 自
点光源追踪系统
设 计 任 务
文 献 标 识 码 :A
文 章 编 号 :1 0- 9 3 (0 2 8 0 6 — 2 0 6 7 7 2 1 )0 — 0 4 0
一
、
系 统 检 测 部 分 可 采 用 摄像 头 ,摄 像 头 高 速 扫 描 ,通 过 分
文 中设 计 的系 统 是 源 自于 2 0年 T 杯 湖 北省 电子 设 计 01 I 大 赛 ,要 求 设 计 并 制 作 一 个 能 够 检 测 并 指 示 点 光源 位 置 的 光
进行位移的检测 ,最终实现跟踪 定位 。
收 稿 日期 :2 2 0 — 6 01 — 50
图 3 L D驱 动 电路 E
作者简介:汪
璇 ,湖北大 学知行 学院计算机与信息工程系 。
第 8期
汪
璇 :点 光 源 追 踪 系 统
6 5
在 硬件 调 试 中调 节 变 阻器 R ,可 看 到 负载 R1上 的 电 V1 流 逐 步 变化 ,变 化 范 围可 达 到 1 0 3 0 , 同 时 也可 观 察 2 - 7 ma 到 L D 灯 的 亮度 逐 渐 增 强 。从 而 实 现 L E ED 灯 电流 变 化 下 的 扫 描 与 跟踪 定 位 。
0e a r
我们 用 了可 调 稳 压 电源 来 给 L D 供 电 , 输 出 电压 能 进 行 精 E 使 密 调节 ,从 而 能 进 行 电流 调 节 , 电路 如 光 源 跟 踪 系 统 示 意 图
二 、方 案 论 证
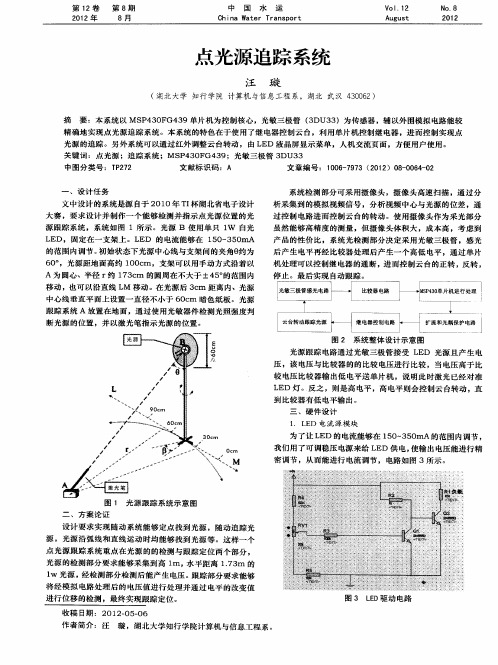
设 计 要 求 实现 随 动 系 统 能 够 定 点 找 到 光 源 ,随 动 追 踪 光
源 跟 踪 系 统 , 系统 如 图 1所示 。 光源 B 使 用 单 只 l 自光 W
基于光敏技术的点光源跟踪系统的设计
3—3 V; 电源 : . 0 双 ±15一±1 V。 5
体 光敏 器件 具有 灵 敏度 高 、 谱 响应 范 围宽 、 光 重量
轻、 机械 强度 高 、 冲击 、 耐 抗过 载 能力强 、 散 功率 耗 大 以及 寿命 长等 特点 。同时 考虑 到本 设计 需要
1 2 设 计方 案选 择 .
1 2 1 恒 流 源 的选 择 . .
对 于恒 流 源 电路 , 设 计 选 用 L 5 本 M3 8芯 片构
成恒 流 源 。L 3 8内部 包 括 有 两 个 独 立 的 、 M5 高增
个 不透 光 的 圆 筒 中 , 筒 上 部 安 装 透 镜 , 圆 以便 聚
控 制舵 机 带 动 激 光 笔 指 向光 源 。 关 键词 MS 4 0 4 7 L 5 T V 1 73 3 rg 1 7 光 敏 电 阻 P 3 F 2 0 M3 8 L 1 1 —. e l 1
中 图分 类 号
T 2 P3
文 献 标 识 码 B
文章 编 号 10 — 3 (0 1 0 —2 1 3 0 03 2 2 1 )309 - 9 0
在 太 阳能 电池 、 阳能 热 水 器等 很 多 领 域 中 太
实现元 器 件在 结 构 上 的连 续 排 列 , 因此 本 设 计 采
用光 敏 电阻 。
2 系统 实 现
都 要对 光 源进 行 跟 踪 , 样 做 能 够 使 太 阳能 设 备 这 的工作 效率 、 量 吸 收率 更 高 。笔 者 利 用 激 光 笔 能
流, 使用 更灵 活 … 。 1 2 2 光敏 器件 的选 择 .. 光敏 器件 包 括 光 敏 二极 管 、 敏 三 极 管 及 光 光 敏 电阻等 。其 中光 敏 电阻是 利 用光 的入 射 引起 半 导 体 电阻 的变 化来 进行 工作 的。光 敏 电阻属 半 导
点光源跟踪系统设计
moos r elsr e s n c uaep s inn . M3 tpc l o s n—urn o recrutmpe ne dutbe tr i e n da c lt o io ig L ia c nt t re t uc i ii lme tsaj s l dv a p a t 1 y 7 a c s c a so et du t E g t i —5 mA. h oess m eyg o o ltdwi i ese i e a g a kn c p a js L D l hs n1 03 0 o i 5 T ewh l y t i v r o dc mpe t nt p cf drn et c ig e s e h h i r
1 引言
文 中设计 的系统 是源 自于 2 1 0 0年 T 杯湖北省 电子 I 设计 大赛 , 要 求是设计 并制作 一个 能够检 测并指 示点 光源位置 的光源 跟踪 系统 ,系统示意 图如 图 1 所示 。光 源 B使用单只 1 白光 L D,固定在一支架上 。L D的 W E E 电流能够在 1 0 3 0 mA 5 5 mA 的范 围内调节 。初始状 态 下光 源 中心线与 支架 间的夹角约为 6 。 光源距地 面 0,
a d p n i h o r e i rg t e sc a g s i a o d a a t b lt . n oi tlg ts u c n b i h n s h n e , th s g o d p a iiy KEY ORD S t p i g mo o ; S 4 0 h t c n u tv e it n e c n t n — u r n o r e W :se p n t r M P 3 ;p O O O d c i e r s s a c ; o s a tc r e ts u c
智能光源追踪器的设计
智能光源追踪器的设计
李满 武汉交通职业学院实践教学中心电学基础教研室 湖北武汉 4 3 0 0 6 5 Байду номын сангаас
【 摘 要】本文设计是 以这蛊公 ̄C o r t e x — M 5 超低功耗单片机为控制核 移动而 移动。 心, 通过 五个光敏 电阻模块来检 测光照 , 当以光敏三极管组成的感光探 头 4 系统整 机调 试 接 受光照产生电 信号经过放 大器放 大送到模数转换 模块, 得到的数字信号 所有的电路都已经设计完成后进行整机的调试。 为了便于观察, 该 送到主控 芯片, 在主控芯片经过一 系 列的处理产生控 制步 进 电机转动的相 系统 在探头 的中间位置 固定 了 一个 激光 器, 当探头正 对某一物 体时, 可 关信号, 将这 些信号送到步进 电机驱动模块 , 进 而驱动两电机 的左右转, 以 以在该物体上 显示一个小的光 点。 因此 , 我们可以 比较 明显的观察探头 至于可以找 到点光 源的位 置。 但由于技术受限, 最终的灵敏度和 精确 度不 是否可 以找 到点光源 。 对系统的整机调试分 软件和硬件调试 , 软件调试 是很 高, 处于半 自动的状态。 主要看程序 的运行情况 。 硬件调试 主要看系统追踪 点光源 的情况 。 【 关键词 】 太 阳能; 利 用率; 自 动追踪; C o r t e x - M 3 ; 技 术受限 4 . 1 软件调试 根据本系统软件 设计 的流 程 , 在这里调试 软件主要设置 了V O —v 8 前言 九个表 示光 感应 光信号 的变量 。 其 中, V 0 一v 4 五个 变量表 示探头 上的 随 着社会和科 技的发展, 资源的需求量不断加 大, 光是地 球上最丰 感应光信号并 且 v 4 表 示探头 中间的感应 光信号, 其余的就是表 示为了防 富 的可再 生利 用的绿 色环保能 源 , 在 利用集 热 器收集它的热 能或 通过 止 外界 干扰所感应的光信号。 具体调 试过程如下 : 太 阳能电池板将其转换 成电能的工程 中, 都希 望发挥最大 效率。 本文采 a 程 序编写完成 , b u i l d 源程序 产生可执行文件 ; 用 的是TI 公司L M3 S 8 1 l 超低 功耗 单片机 为控制核心 , 利 用一些 外围部 b 系统 上 电后 系统 就 开 始初 始化 , 包括时钟 、 模 数 转 换 接 口、 件来 实现 对光源 的 自 动 追踪 。 通过光 源跟 踪系统 帮助受 光平 面跟 随光 P W M、 光感应信号接 口、 调 速控制接 口等的初始 化, 观察相 关寄存器的 源运 动以获 得充足 的光达 到最大 利用率 。 跟踪 系统主要 是一个单片 机 变化 ; 控制 的机械 运动 机构 , 该 系统具 有半 自 动, 跟随 精度高 , 灵敏 度高等 优 c N统 初 始 化 后 , 会 及 时 的 采 集 光 信 号, 在 主 控 芯片 的 控 制 下 点 T L C 2 5 4 3 芯片开始模数 转换 , 观 察相 关变量的变化情况 , 1 . 系统硬件的总体设计和各功能模块的选型。 d 各 路探头采 集的光信号经过 模数转换 后, 在控制芯片 内不断循 环 总体设 计是 感光模 块将 采集 到的光信 号转换 成变化 的 电信号 , 所 进行 比较各路 信号 的大小 来分 别控制 两电机 的转 动。 当探头 中间的光 有的 电信号发 送 到模数转 换 电路 , 将模 拟信号转 换成 8 位数 字信号 , 进 敏三极管受到的光 强最大并且大干外界光强时探头就停止。 否则对 于水 而将数 字信号传 送到 主控 芯片 L M3 S 8 1 1 , 在 主控 芯片里 通过 比较各路 平面的 电机 而言, 会根据 比较V 0  ̄ I V 1 的大小 来决定水平面撒谎 能够 电 信号的大 小 来决 定驱动 步进 电机的 转动 , 从而 达到探 头追 踪光源 的 目 机的正 反转 , 对于竖 直方 向上 的电机而 言, 会根 据V 2 和V 3 的大 小来决 的。 其 中, 电机 驱动模块可 以细分 驱动信号 , 进而可 以使电机转 动的平 定竖直方 向电机 的正反 转, 观察相关变 量和寄存器的变化 。 稳。 同时, 本系统 还可以通 过按键 调速 电路 来控制 电机的转 动速度 , 调 4 . 2 硬件测试 速 信号 传输 到主 控 芯片以后 , 通过 改变P W M波 的 占空 比来 改变其 功 对 系统的硬件 测试包括以下几个步骤 : 率, 从而 改变电机 的转速 。 此 时此刻 , 电机 的速度级 别会在显 示速度模 a 光源 放 置在任 意位 置 , 首先要 保证 探头 在初 始 时并没 有对 准光 块 显示。 源。 然后系统初始 化, 让系统 自 动寻 找点光源。 根 据硬件总体 设计 图来 对系统 的各主要功 能模块 进行 选 型。 本次 现 象: 探头 会在预 定的轨 道转动直到找 到点光 源为止 。 找到点光源 设 计要求探测 距离在1 0 0 c m 处, 且能准 确快速 探测到光源 , 相 比之下光 后会随 着点光 源的位置的移动而移 动; 敏 三极 管具 有较宽 的检测范 围, 且符合此 次系统的要求 , 所以选择 光敏 b 在探 头对 准点光源后 , 先 慢慢移动点光源 然后加快点光源 移动的 三极管 组成 的光 电转换 模块 来担 当探头 。 考虑 到本系统 使用的 模拟信 速 度 号输 入总共 有9 路输 入信 号, 本系统 选择T L C 2 5 4 3 芯片。 主控芯片选T I 现象: 在探头对准 点光源 之后, 若 点光 源慢慢移 动, 则探头可 以跟 公司提供 的LM3 S 8 1 1 。 随 点光源的移动速 度而移动 , 若点光源移动 的的速度过快 , 则探头 会滞 为了设计一个 稳定精确的系统 , 使用混 合式步进 电机及带有细分功 后 于点光 源的移动 。 但是, 探头移 动的大概 方向还是朝着点光源移 动的
点光源二维跟踪定位系统设计
关键词 :光源定位 软件滤波 电机控制 MS 4 0 P3
中 图 分 类 号 :T 1 Hl 文 献 标识 码 :A 文章 编 号 : 10 .9 3 2 1 ) 1-5 —3 0 73 7 ( 0 0 0 10 80
上‘ F电机通过木板相连,探测器捆绑 本方案在探测器的固定 上需使探测器
左侧和右侧电机捆绑在一起,探测 运 器捆绑在左侧电机上
.
碧 使探器 下动右 电的 动在 侧 机 .侧l 转 使探 得 测上移 左侧屯机的转动 器左右移动,上侧 电机的转动使得探测器 侧机 转 上 电 上 下 }的 动 得 测 机
一
编址 , 寻址 范围 最 大可 以达 到 6 K, 且可 以外扩 展 存储 器 ; 4 并
图 2 电机 驱 动 原 理 图
片内有精密硬 件乘法器 、 2个 l 6位定时器、 个 l 1 4路的 l 位 2
模 数 转 换 器 等 。在 本 设 汁 中 ,我 们 需 要对 光 敏 电阻 采 集 到 的 .2 2 信 号 进 行 A/ 换 ,进 而 对 电机 进 行 控制 。MS 4 0 19单 1 . 点 光源 寻 光 模 块 D转 P3F4
时 需 加 上 反 向 电 压 。 无 光 照 时 , 很 小 的 饱 和 反 向漏 电流 , 有
设计中采用步进 电机 。 步进 电机 区别于其他控 制电机 的
暗 电流 , 时光敏二 极管截 止 : 此 当受到 光照 时, 饱和 反 向
最 大 特 点 是 ,它 是 通 过 输 入 脉 冲 信 号 来进 行 控 制 的 , 电 机 漏 电 流 大 大 增 加 , 成 光 电 流 , 随 入 射 光 强 度 的 变 化 而 变 即 形 它
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点光源跟踪系统(B题)
摘要:本系统以STM32单片机作为控制处理核心,设计并制作了一个能够检测并指示点光源位置的光源跟踪系统。
该系统的主电路主要由传感器模块、步进电机驱动模块、液晶显示模块和电源模块组成,将光敏三极管、光敏电阻、激光笔与步进电机固定,利用光敏三极管和光敏电阻检测光照强度判断光源位置,控制步进电机转动来调整传感器和激光笔的转动角度,从而跟随点光源的移动而转动,准确跟踪点光源。
本系统还具有人机交换界面,各参数及测试模式可由键盘输入并显示,智能性好,反应速度快,最终完成了题目的所有基本指标及全部发挥部分的要求。
关键词:STM32;光敏三极管;光敏电阻;光源跟踪
一、系统方案
1.1整体方案描述
本系统由点光源和光源跟踪模块两大部分构成,以STM32单片机为控制核心实现了点光源识别、点光源跟踪、模式设定、液晶显示及激光笔精确指示等功能。
光源由功率LED组成,通过改变回路中滑动变阻器的阻值大小,来改变功率LED 电流的大小,使电流能在150mA~350mA的范围内调节。
光源跟踪模块由STM32
单片机、步进电机、传感器电路、激光笔组成。
当点光源移动时,传感器电路的光敏三极管和光敏电阻检测到点光源强度发生改变,通过STM32单片机AD采样处理,控制步进电机的转动,使激光笔始终指向点光源中心,即达到点光源跟踪的目的。
本系统总体结构框图如图1所示。
图1 系统总体结构框图
1.2方案比较与选择
1.1.1光源检测方案选择
方案一:由光敏元件检测中心线处的光源强度,实现光电转换,通过AD采样,检测电压的变化,设计算法实现光源立体坐标的检测。
此方案运用软硬结合的方法可以检测出光强的微小变化,硬件电路和算法都比较简单。
方案二:硅光电池检测中心线处的光源强度,实现光电转换,通过电压比较器检测电压的微小变化,处理过程基本由硬件完成,调试过程复杂。
综合上述比较,考虑到本系统抗干扰能力要求较高,采用光敏元件检测,硬件结构简单,环境适应性较强,故选择方案一。
1.1.2传感器选择
方案一:采用光敏电阻检测点光源强度变化。
光敏电阻是利用光的入射引起半导体电阻的变化来进行工作的,具有灵敏度高,光谱响应范围宽,重量轻,抗过载能力强以及耗散功率大等特点。
方案二:采用光电二极管检测点光源强度变化。
光敏二极管的优点是线性好,响应速度快,对宽范围波长的光具有较高的灵敏度,噪声低,小型轻量以及耐振
动与冲击等;缺点是输出电流小。
方案三:采用光电三极管检测点光源强度变化。
光敏三极管和普通三极管相似,也有电流放大作用,只是它的集电极电流不只是受基极电路和电流控制,同时也受光辐射的控制。
不同材料制成的光敏三极管具有不同的光谱特性,与光敏二极管相比,具有很大的光电流放大作用,即很高的灵敏度。
综合上述比较,考虑到本设计采用五路传感器检测,中路传感器要求灵敏度高且小型轻量,故选择光敏电阻;旁路传感器要求输出电流大,灵敏度高,为了提高系统稳定性,故选择光敏三极管和光敏电阻。
因此,传感器最终采用方案一和方案三相结合的方式。
1.1.3控制电机的选择
方案一:采用直流减速电机控制激光笔。
直流减速电机节省空间、可靠耐用、调速范围大等优点。
但直流电机控制精度差,不能精确控制的所转的角度。
方案二:采用舵机驱动。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统,具有良好的速度控制特性,减速效率可达90%以上,但是舵机的误差最小为0.18度。
方案三:采用两相四线步进电机驱动。
两相四线步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件,有较好的位置精度和运动的重复性,优秀的启停和反转效应,速度正比于脉冲频率,因而有较高的转速范围。
同时,采用具有细分功能的驱动电路驱动,精度可高达25600步数/转,误差最小为0.00004度。
综合上述比较,考虑本设计要求激光笔精准指向点光源中心,且激光笔与点光源距离达2米,精度要求极高,故选择方案三。
二、理论分析与计算
2.1两相四线步进电机的精度分析与计算
根据题目要求,激光笔光点应能指向LED的中心,LED的直径大约为5mm,按题意激光笔指示器与LED的水平距离约173cm,支架高约100cm,故LED与光点距离约为200cm。
本设计方案采用具有细分功能的驱动电路驱动步进电机转动,细分精度为3200步/转,每步进旋转角度为0.1125°,相当于激光笔在暗黑纸板上运动约3.9mm,完全可满足本题目所要求的控制精度。
两相四线步进电机驱动模块通过三个拨码开关设定细分精度,细分设定功能如表1所示。
表1:步进电机细分设定
2.2 光强信号采集环节设计精度分析与计算
STM32单片机内置有12位的A/D器件,可以采用内部或外部的参考电压。
本系统采用STM32单片机内置A/D器件,选择内部3.3V的参考电压,所以输入的最大模拟信号幅度为3.3V,最小的分辨率约为0.8mV,完全可满足题目要求。
2.3 功率LED电流调节
LED的亮度取决于流过的电流,因此调节LED电流可以改变LED的光强。
本实验中采用大功率LED,该LED可以承受的最大电流为500mA,完全满足LED 电流的调节要求,并且有适当的电流余量。
在电源电压为5V时,点光源电路串接12欧的固定功率电阻和33欧的可调电阻,即可实现光源LED的电流能够在150mA~350mA的范围内调节。
光源LED最大电流I max和最小电流I min计算如下:
⁄≈416.7mA ⑴
I max=5V12Ω
⁄≈111.1mA ⑵
I min=5V(12Ω+33Ω)
三、电路与程序设计
3.1 电路设计
3.1.1 点光源模块
点光源模块选用额定功率为1W的功率LED,采用5V稳压供电,在点光源电路串接12欧的固定功率电阻和33欧的可调电阻,即可实现光源LED的电流能够在150mA~350mA的范围内调节,点光源模块如图2所示。
图2 点光源模块
3.1.2 传感器模块
本设计采用五路传感器检测,结合两路光电三极管和三路光敏电阻,将光照强度转化为电压值,经过截止频率为10Hz的低通滤波器滤除干扰信号,再由单片机AD采集及数据处理,准确判断点光源位置,快速跟踪点光源。
中路传感器采用光敏电阻,置于10cm长黑色细管一端,准确判断光强最大点位置(即点光源位置)。
旁路采用两路光敏三极管和两路光敏电阻相结合的方式辅助判断光强变化情况,从而精确控制步进电机运动,使激光笔精准指向点光源中心。
传感器模型及模块电路如图3、4所示。
图3 传感器模型
图4 传感器模块电路
3.1.3 步进电机驱动模块
本设计方案采用具有细分功能的两相四线步进电机驱动电路驱动步进电机转动,设计细分精度为3200步/转,每步进旋转角度为0.1125°,相当于激光笔在暗黑纸板上运动约3.9mm,完全可满足本题目所要求的控制精度。
步进电机驱动模块具体电路如图5所示。
图5 步进电机驱动模块
3.2 程序设计
系统主程序流程图如下图6所示。
图6 主程序流程图
四、测试方案与测试结果
4.1 测量工具,如表2所示
表2 测量工具
4.2 测试方法及结果
表3 激光笔调离点光源中心后重新指向点光源所需时间及偏离误差
表5 光源支架旋转角度β,激光笔重新移向光源所需时间及偏离误差
表6 光源支架沿着直线LM缓慢移动60cm时,激光笔指向光源所需时间及偏离误差
五、总结
本光源跟踪系统以STM32单片机作为控制处理核心,实现了点光源的位置检测和跟踪指示。
采用五路传感器检测电路检测光强信息,经单片机AD采集处理,准确判断点光源位置,控制步进电机转动的角度及方向,快速跟踪点光源,并通过激光笔来指示点光源位置。
当移动激光笔光点偏离点光源时,传感器能够快速调整方向使光点重新指向点光源;对于不同的LED亮度,移动光源支架,传感器能缓慢跟踪点光源转动;转动光源支架使纸板旋转一定角度,传感器也能检测到光照强度的变化并跟踪点光源转动,最终使激光笔光点基本对准点光源。
整个设计出色的完成了题目的所有基本指标及全部发挥部分的要求。
在此感谢大赛组委会给我们创造了一个锻炼我们、展示我们的机会,同时也感谢学校、老师对我们的支持和帮助!
参考文献
【1】宁武唐晓宇闫晓金《全国大学生电子设计竞赛基本技能指导》北京:电子工业出版社,2009.5
【2】张华林周小方《电子设计竞赛实训教程》北京:北京航空航天大学出版社,2007.7
【3】谢兴红林凡强吴雄英《MSP430单片机基础与实践》北京:北京航空航天大学出版社,2008.1。