点光源跟随器报告
点光源跟踪报告
3.2编程思想
本设计思想:采用三个光敏三极管采集光强,左右两个用于判断光源的位置是在左还是右,中间的用于精确定位点光源.
方案二:采用大功率三极管TIP31C做大功率LED灯的驱动。大功率三极管TIP31C能通过最大电流为3A,完全能够合乎题目的要求。设计时,利用三极管基极电流与发射极电流的倍数关系,设计出一个电流连续可调的恒流源。实验后发现效果比较明显,易于控制。
由于三极管主要就是通过电流的关系而工作的,其电流特性比较稳定,且易于控制,所以本系统选择了方案二。
图2-1光源检测模块1
由运放的特性知:V2=V3,Ir2=0,由反馈特性知:V2=V1=V4* ;
取R3=1K,R4=9.1K;可得Av=10;再加一级电压跟随器可增加电路带负载能力。
2.2高亮度LED灯驱动电路
本方案要求LED灯的电流能够连续可调,所以采用大功率三极管TIP31C来驱动它,利用三极管集电极电流与基极电流的倍数关系来驱动1Wled灯并实现其连续可调的功能。测试时发现其电流受基极的电位计控制,所以能够实现其连续可调,且效果较好。其详细电路图如下图2-3
七.参考文献
[1]康华光.模拟电子技术基础(第五版).高等教育出版社.2006
[2]高吉祥.全国大学生电子设计竞赛培训系列教程.电子工业出版社.2007
[3]郭天祥.51单片机C语言教程.电子工业出版社.2008
6.7%
20度
是
0.5度
2.5%
30度
是
运动光线跟踪实验报告(3篇)
第1篇一、实验目的1. 了解运动光线跟踪的基本原理和方法。
2. 掌握运动光线跟踪在计算机图形学中的应用。
3. 通过实验,提高对光线跟踪算法的理解和实际操作能力。
二、实验原理运动光线跟踪是一种用于模拟光线在动态场景中传播的算法。
在计算机图形学中,运动光线跟踪广泛应用于动画制作、实时渲染等领域。
其基本原理是:根据物体表面的运动情况,实时更新光线路径,从而实现动态场景的光线跟踪。
三、实验环境1. 操作系统:Windows 102. 开发环境:Visual Studio 20193. 图形库:OpenGL四、实验步骤1. 创建场景:首先,创建一个包含多个物体的动态场景,物体表面具有不同的材质和运动轨迹。
2. 初始化参数:设置光线跟踪的参数,如光线精度、采样数等。
3. 运动光线跟踪算法实现:(1)确定初始光线:根据摄像机位置和朝向,确定初始光线路径。
(2)遍历物体:按照物体表面的运动轨迹,实时更新光线路径。
(3)计算光线与物体的交点:根据光线与物体表面的交点,计算光线在物体表面的反射、折射、散射等效果。
(4)跟踪光线:根据光线在物体表面的传播情况,继续跟踪光线路径,直至达到终止条件。
4. 渲染场景:将运动光线跟踪的结果进行渲染,展示动态场景的光线效果。
五、实验结果与分析1. 实验结果:通过运动光线跟踪算法,成功实现了动态场景的光线跟踪,展示了场景中物体表面的光线效果。
2. 分析:(1)实验结果表明,运动光线跟踪算法能够较好地模拟动态场景中的光线传播过程。
(2)通过调整光线跟踪参数,可以优化渲染效果,提高渲染速度。
(3)在实际应用中,运动光线跟踪算法可以应用于动画制作、实时渲染等领域,为计算机图形学的发展提供有力支持。
六、实验总结1. 通过本次实验,深入了解了运动光线跟踪的基本原理和方法。
2. 掌握了运动光线跟踪在计算机图形学中的应用,提高了实际操作能力。
3. 在实验过程中,遇到了一些问题,如光线跟踪速度较慢等。
汇智通点光源灯具产品检验报告
结论
1
标记
GB7000.201-2008
(GB7000.1)
5(3)-2008
灯具上的标记:
―
―
符合要求
来源标记
√
合格
产品型号
√
合格
输入电压
√
合格
额定功率
√
合格
2
结构
GB7000.201-2008
(GB7000.1)
6(4)-2008
整机外表面无易伤人之披锋.
√
合格
符合要求
玻璃无爆裂、变形、水纹.
№:2013-A0249
检验报告
产品名称:
点光源灯(蓝光)TRTG-2329
产品类别:
[户外灯具]
受检单位:
产品保障中心
委托部门:
市场营运商务部
广东锐拓照明质量检验测试中心
产品检验报告
文件编号:RT-QC-ZX003版本号:A/01
产品名称
点光源灯(蓝色)
产品型号
TRTG-2329
数量
103
项目名称
(测试电压DC100V)
非安全特低电压供电灯具:绝缘电阻≥2MΩ.(测试电压DC500V)
√
合格
符合要求
7
电气
强度
GB7000.201-2008
(GB7000.1)
14(10.2.2)
安全特低电压供电灯具:
试验电压500V/60s.
非安全特低电压供电灯具:
试验电压2U+1000V/60s.
√
合格
符合要求
海南汇智通
检验日期
2013-08-12
样品来源
生产线
电光源跟踪系统报告
点光源跟踪系统设计报告南京农业大学徐伟,郝文欣,朱长明摘要:为了满足点光源跟踪系统的设计要求,我们对各单元电路方案进行了比较论证,最终确定系统以MSP430单片机作为系统的控制核心,采用高灵敏度的光敏二极管作为光源轨迹采集器件。
对于关键的地面跟踪系统的旋转部分,经过充分比较、论证,最终选用了高输出扭矩的直流减速电机。
系统显示采用一块1602的液晶,编程容易,美观大方。
实践证明,系统完全达到了设计要求,不但完成了所有基本和发挥部分的要求,并增加了对准语音播报一个创新功能。
Abstract: In order to satisfy the point source tracking system's design requirements, carried on various units electric circuit plan comparison to prove and to determine that the system took system's control core by the MSP430 monolithic integrated c ircuit, used the high sensitivity the photodiode to do for the photo source path gathering component; Regarding the key ground tracking system's rotating part, undergoes the full comparison, the proof, has selected the high output torque direct-current deceleration electrical machinery finally; The system demonstrated that uses 1602 liquid crystals, the programming is together easy, elegant appearance. The final experiment indicated that the system has achieved the design requirements completely, not only has completed all basic and the display part request, and increased the alignment pronunciation to disseminate news an innovation function.关键词:光电传感器,MSP430单片机,直流减速机1.系统方案1.1实现方法本题要求设计并制作一个能够检测并指示点光源位置的光源跟踪系统,我们利用直流减速电机来实现地面跟踪系统的旋转定位;利用光电传感器来实现对光源位置的检测追踪;利用MSP430实现对整个系统控制,实现整个系统的协调运作;还有显示模块作为人机界面,实现显示功能。
灯光追逐器超完整实验报告

上海电机学院证券实验室实验报告三实验课程名称工业流程设计开课系部国际贸易班级学号姓名指导教师2012 年月日工艺流程实验指导书实验一:工艺程序分析一、实验目的1.学会正确使用工艺程序分析的符号。
2.掌握工艺程序分析的方法。
3. 掌握工艺程序图的绘制方法。
二、实验内容及步骤本实验通过了解灯光追逐器的工作原理,熟悉其结构组成。
通过观看录像或图片以及阅读灯光追逐器的装配资料,全面掌握灯光追逐器的装配工艺过程。
最后画出它的现行工艺程序分析图。
实验步骤如下:1.选择灯光追逐器为研究对象,通过组装熟悉它的组成,掌握各部件的名称。
2.观看装配过程的录像或图片,并结合装配资料进行实际的装配。
3.从第一道工序到最后一道工序,将安装过程的每一道工序的工艺内容都要记录清楚。
4.按照工艺程序图的画图规则,在已准备好的工艺程序表格上绘制其工艺程序图。
5.详细分析“加工”、“检查”所花的时间、顺序等情况,发现影响效率的原因和存在的问题。
6.提出改善方案、措施,并对其进行反复修正,得出最终的改进方案。
三、实验报告要求1.画出所设计的灯光追逐器组装工艺程序图。
2.提出改进方案,绘制出改进后的工艺程序图。
3.对改进前后的工艺程序图进行比较并写出分析报告(报告要包括:从那些方面进行改进,例如加工时间、操作者体力、经济效益等;改进前后的效果分别时怎样的)。
工艺程序表34秒49秒23秒37秒10秒2、改进后的工艺程序图83、分析报告改进的步骤:1.在改进前的版本中,由我小组一位成员来打开箱盖,检查内部有无损坏,零件有无缺损3秒,准备四个橡皮脚,螺丝螺母等零件180秒, 戳穿橡皮脚12秒,将四个螺钉插入橡皮脚内20秒,在箱底安装四个橡皮脚24秒,用螺丝帽将线路板,橡皮胶固定6m。
但是后来我们发现这样太耗时间,总共耗去10分钟。
于是在改进后的版本中,例如有一人检查内部损坏。
另一人去拿零件。
两个人同时手拿橡皮脚,每人戳穿两个,每人固定两个,通力合作以后,节约了很多时间。
光线追踪实验报告
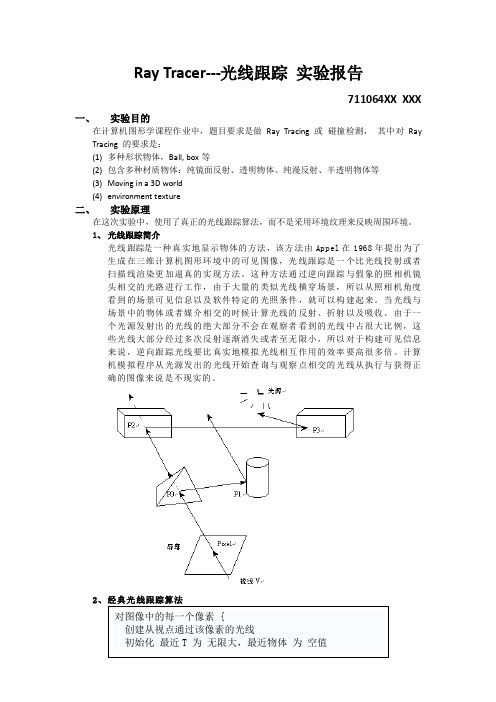
Ray Tracer---光线跟踪实验报告711064XX XXX一、实验目的在计算机图形学课程作业中,题目要求是做Ray Tracing 或碰撞检测,其中对Ray Tracing 的要求是:(1)多种形状物体,Ball, box等(2)包含多种材质物体:纯镜面反射、透明物体、纯漫反射、半透明物体等(3)Moving in a 3D world(4)environment texture二、实验原理在这次实验中,使用了真正的光线跟踪算法,而不是采用环境纹理来反映周围环境。
1、光线跟踪简介光线跟踪是一种真实地显示物体的方法,该方法由Appel在1968年提出为了生成在三维计算机图形环境中的可见图像,光线跟踪是一个比光线投射或者扫描线渲染更加逼真的实现方法。
这种方法通过逆向跟踪与假象的照相机镜头相交的光路进行工作,由于大量的类似光线横穿场景,所以从照相机角度看到的场景可见信息以及软件特定的光照条件,就可以构建起来。
当光线与场景中的物体或者媒介相交的时候计算光线的反射、折射以及吸收。
由于一个光源发射出的光线的绝大部分不会在观察者看到的光线中占很大比例,这些光线大部分经过多次反射逐渐消失或者至无限小,所以对于构建可见信息来说,逆向跟踪光线要比真实地模拟光线相互作用的效率要高很多倍。
计算机模拟程序从光源发出的光线开始查询与观察点相交的光线从执行与获得正确的图像来说是不现实的。
2、经典光线跟踪算法由以上经典的光线追踪算法可以发现,在此算法中,环境中的物体等模型,并不是一次性的画好的,而是对整个场景一个像素一个像素的画上去的,光线跟踪算法中的每一根光线要与场景中的每一个物体所含的每一个面求交。
三、光线跟踪算法实现1、计算观察光线首先需要确定光线的数学表达式。
一条光线实际上只是一个起点和一个传播方向,假设起点为O(x1,y1,z1),屏幕上一点为D(x2,y2,z2),则光线的方向dir(x3,y3,z3)为:dir=O–D;即在程序中,光线的起点定义为:方向为:由此可以确定一条光线然后就需要求出与该光线相交的物体中的最近的交点2、光线与球体相交球体由方程(x-a)2+(y-b)2+(z-c)2=r2确定,求光线是否与方程相交,只需计算方程组(x-x1)2+(y-y1)2+(z-z1)2=R2e+ d t = 0有无实数解即可。
点光源跟踪设计报告
“点光源跟踪系统”的设计与实现摘要:本点光源跟踪系统由MSP430F5438单片机、bh1750fvi-e光强传感器,LED 灯和云台等组成闭环控制系统,主要模块有LED驱动电路模块、云台控制模块和光能检测模块。
在芯片TPS61062控制的驱动电路作用下产生电流可调的点光源,通过光能检测模块比较各方位光照强度,控制不同继电器的导通从而控制云台向某个方向转动,实现追光功能。
而且,需要校准时也可以用红外进行手动调节。
关键词:MSP430单片机,光能检测,云台控制“The point source Tracking System” 的设计与实现Abstract:The point source tracking system by the MSP430F5438 MCU, bh1750fvi-e light intensity sensors, LED lights and head composed of closed-loop control system, the main module has LED driver circuit module, PTZ control module and the light detection module. TPS61062 chip under the control of drive circuit produces current adjustable light source, light detection module by the parties to place light intensity compared to control conduction of different relays to control head rotation in a certain direction, to achieve functional recovery of light. Moreover, the need for calibration can also be adjusted manually using infrared.Key Words:MSP430 microcontroller, light detection, PTZ control一、方案比较与论证1、LED驱动模块的方案比较与论证方案一:用电源直接在LED的两端加一个电压使LED发光,但这样需要一个可调电压源,通过调节电压来改变LED的电流,从而实现亮度的调节,由于电压的调节很难实现精确的步进,使得这种调节方式线性度很差,给我们监测电流造成了一定的难度,而且这种方案容易损坏LED灯,故未采用此方案。
光源自动跟踪系统报告
2012年广西大学生电子设计竞赛光源自动跟踪系统(F题)摘要系统采用8位单片机STC89C52作为智能小车系统检测和控制的核心,通过2光敏传感器来对1W的LED白光来感光最强的点进行跟踪,当LED灯随着给小车的行走,通过步进电机支架上的2光敏传感器控制步进电机转动,来对不同感光最强的点进行跟踪从而实现检测并指示点光源位置的模拟光伏发电太阳光自动跟踪系统功能。
硬件系统采用最为精简的电路模块搭建,软件系统使用模块化编程。
硬件由电源电路、单片机最小系统模块、电机驱动电路、循迹引导电路等组成。
,最终实现了能够检测并指示点光源位置的模拟光伏发电太阳光自动跟踪系统功能,测试表明各项指标基本符合设计任务要求。
关键词:STC12C5A60S2单片机、L298N电动机、循迹。
显示屏。
光源、跟踪、检测、激光笔、白光LED目录一、系统设计要求 (2)1.1 任务 (2)1..2设计相关要求 (2)1.2.1.. 基本要求 (3)1.2.1 发挥部分 (3)二、系统方案论证与选择 (3)2.1系统基本方案 (5)2.2系统各模块的最终方案 (5)三、系统的硬件设计与实现 (5)3.1系统硬件的基本组成部分 (5)3.2主要单元电路的设计 (6)3.2.1电源电路 (6)3.2.2 控制电路 (6)3.2.3循迹电路 (7)3.2.4电机驱动电路 (8)3.2.5 显示屏1602 (8)3.2.6 光敏传感器 (9)3.2.7 HB7128电机步进 (10)四、系统软件的设计………………………………………………………………五、系统测试…………………………………………………………………………六、总结…………………………………………………………………………………一、系统要求设计智能车辆是集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,是智能交通系统的一个重要组成部分,其设计主要集机械、电子、检测技术与智能控制于一体,是机器人研究领域的一项重要内容,在军事、民用、太空开发等领域有着广泛的应用前景,且其智能技术广泛运用于各种领域。
设计跟随器的实验报告
设计跟随器的实验报告1.引言1.1 概述概述:设计跟随器是一种能够追踪目标位置的装置,它可以通过识别目标的信号或者其他特征来实现自动跟随。
本实验旨在研究设计一种有效的跟随器,并对其原理和应用进行深入探讨。
通过实验过程中的数据收集和分析,我们将评估设计跟随器的性能,并探讨其在实际应用中的潜在价值。
1.2 文章结构文章结构部分主要描述了整篇实验报告的组成部分,包括引言、正文和结论,通过这三个部分来完整地展现设计跟随器实验的过程和结果分析。
引言部分用于介绍整个实验的概述、文章的结构和目的,正文部分包括了设计跟随器的背景、原理和实验过程,通过这些内容来详细展现了实验的整体情况,最后结论部分则对实验结果进行了分析,并展望了设计跟随器的应用前景,最后进行了总结。
整个文章结构清晰明了,逻辑性强,能够让读者对整个实验过程有一个全面的了解。
1.3 目的目的部分的内容应该是对本实验的目的进行简要说明。
在设计跟随器的实验报告中,目的可能包括但不限于:1. 验证设计的跟随器能够准确地跟踪指定目标物体的运动轨迹;2. 评估跟随器的性能和稳定性;3. 探讨跟随器在实际应用中的潜在价值和推广前景;4. 为进一步的研究和开发提供实验数据和实践经验。
在此部分还可以补充说明本实验的目的是为了解决什么问题或者需要解决的问题,以及本实验对于相关领域的意义和价值。
2.正文2.1 设计跟随器的背景设计跟随器是一种用于追踪和监测目标位置的设备。
它可以通过使用各种传感器和技术来实时获取目标的位置信息,可以用于诸如物流、运输、军事、安全监控等领域。
设计跟随器的背景可以追溯到对目标位置追踪和监测的需求,随着技术的发展和需求的增加,设计跟随器的研究和应用也得到了广泛的关注和发展。
设计跟随器的背景涉及到各种技术领域,包括GPS全球定位系统、惯性导航系统、卫星定位系统、雷达技术等。
这些技术的不断进步和发展为设计跟随器提供了更加精准和可靠的位置追踪和监测能力。
点光源追踪系统报告---不加学号
2010年陕西省第二届大学生德州仪器(TI)杯模拟及模数混合电路应用设计竞赛参赛队编号(参赛学校填写)学校编号组(队)编号选题编号B点光源跟踪系统设计报告摘要:该系统由主控电路、采样调理电路、光源支架、光源跟踪电路、电源模块电路、液晶显示电路等六部分组成。
我们采用TI公司推出的Cortex-M3系列LM3S811为主控芯片,以及光敏三极管(3DU5C)采集LED灯光强度的方案实现对点光源的跟踪。
我们创造性的采用LM3S811芯片特有的过采样功能,能够对多达连续64次的采样作出平均计算,有效消除采样结果的不均匀性,实现激光笔对点光源的精确追踪。
采用内部看门狗实现了在调节点光源LED电流后,在不改变电路参数和工作模式的情况下,激光笔依然能自动跟踪点光源。
通过LM317的输出电压可控来调节点光源的电流大小,满足题目要求。
关键词:LM3S811 光敏三极管过采样自动跟踪一、系统方案论证1.主控芯片选择方案我们选择了TI公司推出的Cortex-M3系列LM3S811为主控芯片。
2.光敏器件选择方案题目要求检测环境是正常光照,在有一定正常室内光照干扰的情况下,需要采用对点光源敏感的器件。
方案一:采用传统方法使用光敏电阻检测光强。
方案二:采用光敏三极管(SDU5C)检测光源方案分析:方案一中的光敏电阻只能对有无光照进行检测,无法对光的强度进行检测,在正常室内光照的环境下,对点光源并不敏感。
而光敏三极管对光强非常敏感,除了可以实现光 -电转换外,还能放大光电流,我们也通过采样的数据分析证明光敏三极管可以在正常室内光照下有效的对点光源的强度变化进行检测,能满足题目要求,故选择方案二。
3.点光源供电方案方案一:利用Cortex-M3控制DA芯片TLC5615产生稳定0-3.3V稳定电压,但输出电压在空载与加负载的情况下有很大区别,不能在有负载情况下实现稳定的电流输出,达不到300mA。
方案二:利用LM317产生可控电压对LED点光源供电。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2010第二届“TI杯”陕西省大学生电子设计竞赛
题目B:
《点光源跟踪系统》
参赛学生:李伟龙、梁谋、张凯
指导教师:张倩
学校:西安交通大学城市学院
院系:电信系
摘要
本系统以TI公司的超低功耗 MSP430 处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统.该系统能准确跟踪点光源的位置并用激光笔指示其位置。
以考核系统跟踪轨迹的准确性,轨迹的跟踪以完成任务的准确度来评判设计完成指标。
硬件系统以MSP430F5438为核心,根据光敏二极管的光电特性检测光源位置,采用步进电机来完成跟踪指示的功能。
软件部分采用基准光照比对的思想编写出源代码来锁定光源位置,实现光源的检测与准确定位。
经过多次测量验证,结果表明所设计的点光源跟踪系统能够自动检测点光源位置并指示。
关键词:光源跟踪定位,光敏二极管, MSP430,步进电机控制
目录
摘要 (1)
1 系统方案选择与论证 (4)
1.1光源采集方案 (4)
1.2光源检测与处理方案 (4)
1. 3 方案选择 (3)
2 系统的工作原理 (5)
3 硬件系统设计 (5)
3.1 光源检测部分 (4)
3.2信号处理部分 (5)
3.3电机驱动控制部分 (5)
4 软件系统设计 (6)
5点光源的设计、电流的测量及显示部分 (7)
6 测试结果及误差分析 (8)
1 系统方案选择与论证
根据题目的基本要求,本系统主要完成对光源的跟踪与指示,通过采集并处理不同位置光照强弱的有关数据,进而控制电机转向,以实现对光源的跟踪,下面论证系统实现方案。
1.1光源采集方案
光源采集可以采用光敏电阻,光敏二极管,或者红外接收管,由于光敏电阻受检测距离和光照强度特别是普通白光的的影响较强烈,当光源距离大于三米时感应电压信号很弱,红外接收管只受红外光控制.光敏二极管检测距离较远,有二极管特性,其导通条件还和外界光线有关,在室内环境下,外界光线克服了其导通压降,提高了检测的精确度,本系统只对LED光源进行检测与跟踪。
基于上述分析,拟采用光敏二极管实现光源的采集与跟踪
1.2光源检测与处理方案
光敏二极管采集到的信号电压通过MSP430单片机的A/D模块,实现对信号的处理.通过继电器对电机进行控制。
1.3方案选择
基于以上方案的优缺点比较,本设计采用光敏二极管采集光源,通过电压跟随,将信号电压送入MSP430 对步进电机进行控制方案,实行光源的精确定位,系统电气原理图如下图1.3-1所示
图1.3-1 系统电气原理图
2 系统的工作原理
下图2.1给出系统框图,光敏二极管通过对光源不同位置光照强度的检测,转化为电信号送入单片机P 口,单片机对送来的信号进行处理,输出信号通过继电器对电机进行控制,通过不同方位光照强度的变化来调整电机的方位,使得光敏二极管总是采集临近光照最强方位的光。
图2.1系统框图 3 硬件系统设计
由于光源在空间散射,为使光敏元件有效地接收光线,采用透镜聚光的方法采集光源信号,当跟踪到光照最强的方位时用激光笔指示跟踪具体方位,光敏二极管反偏接入电路,通过光敏二极管的光电性质将光照强度的变化转化为电压信号,为降低信号源的负载,使采集信号不失真地输入单片机,使用TLV2463运算放大器跟随输入信号,跟随后的信号经过单片机逻辑时序控制步进电机准确旋转一定角度使得云台旋转方位准确可控,更方便软件复位,反馈控制电机角度偏差,形成闭环控制,通过实验可知,可以准确跟踪光源的具体位置,当跟踪到光源的具体位置后,激光笔指示灯亮。
为使电机驱动部分与控制部分相互独立,采用继电器隔离。
3.1光源检测部分
利用光敏二极管对白光的有敏感反应的特性,可以完成对光源的检测,检测信号的输出有以下a,b 两种方案可供考虑,如图3.1所示
方案a 方案b
图3.1
图a所示方案采用电压比较法,采集到的电压信号通过与基准电压比较,产生高低电平脉冲,通过电平的变化得到检测信号,由于基准电压可控性不稳定,且产生的负电平可能烧坏单片机,图b所示采用电压跟随,使信号无失真地输入到单片机进行处理,通过实测综合比较后,我们采用图二所示方案进行信号检测。
3.2信号处理部分
检测信号送入单片机I/O口,通过A/D转换,转化为数字脉冲信号.当光照强度偏离基准点时,程序通过对临近光照强度的采集,与基准光照强度比较,控制电机转向,准确跟踪光源的具体位置,初始时刻设置基准电压信号,或者预先扫描整个光照区域,确定光照强度最大的点所对应的信号电压为基准电压,当光源移动时,光敏二极管接收到的光照强度减小,此时单片机控制电机向周围空间寻找光源,当找到光照强度最大的位置时电机停止移动,同时激光笔被点亮,
3.3电机驱动控制部分
云台转动方向分别通过驱动电机向上,下,左,右,四个方向的继电器控制,水平方向上,当光照强度改变时,软件系统默认电机向左转动,若向左光照减弱,则转向右边,检测到光照强度最大的点,再向右寻找,若光照强度减小,则返回最大光照强度点。
电机控制部分原理图见附录
4 、软件系统设计
通过对430单片机的编程,利用其A/D模块完成由外部电路采集的脉冲计数,实现软件对电机转动方位的控制,主要是突出用软件编程达到控制硬件的目的,如图4.1所示.
图 4.1
5、点光源的设计、电流的测量及显示部分
此模块采用TI公司提供的INA270芯片,通过调节电位器,改变LED的亮度的同时,流过R1的电流值也发生着变化,放大14倍后由OUT端输出的模拟信号再送人430单片机的A/D模块转换成数字量,然后由数码管显示出来。
如下图示:
6、测试结果及误差分析
光源使用一只白光LED,固定在高度为一米的支架上,直流电源对其供电,利用电位器可使其电流在150mA到350mA范围内调节,采用透镜聚集点光源,为使激光笔准确指向跟踪点,激光笔放在下方,通过调试使激光笔能够准确指向跟踪点。
测试结果:
在室温25℃,普通实验室条件下,通过现场测试,利用电位器调节可使流过LED的电流在110mA到550mA范围内变化,满足题目要求。
当光源移动时,激光笔能够在10秒内指向点光源,将激光笔光点调偏离点光源中心30cm时,激光笔能够跟踪寻找最终指向点光源;在激光笔基本对准点光源时,以光源跟踪系统为圆心,将光源支架沿着圆周缓慢移动时,激光笔能够连续跟综寻找最终指向LED点光源,能够满足基本要求,在激光笔基本对准光源时,将光源支架沿着直线LM平稳缓慢移动时,激光笔能够连续跟踪指向点光源。
将光源支架旋转一个角度,经过测试,激光笔能够跟踪并比较准确地指向点光源
误差分析:
实际测试过程中,激光笔指示点光源方位存在偏差,主要原因在于光照采集系统不够精准。
透镜聚焦点不准,受其它外界光源的干扰等均可造成上述误差,从测试结果分析,有时造成的误差原因是受实验条件的约束,如在固定轨道上移动点光源时,由于人为的原因造成轨迹偏离,电机转速造成跟踪时间延长等,这些误差都有待进一步改进。
附录
电机控制部分原理图。