点光源跟踪器系统设计
光源自动跟踪系统设计系统建模

光源自动跟踪系统设计系统建模一、引言光源自动跟踪系统是一种能够自动调节光源方向的系统,可以在不同的环境下保持照明效果稳定,提高照明效率和舒适度。
本文将介绍该系统的设计和建模。
二、系统设计1. 系统组成光源自动跟踪系统由传感器、控制器和执行器三部分组成。
传感器负责检测环境亮度和人体位置,控制器根据传感器反馈的信息计算出最优的光源方向指令,执行器则根据指令调节光源方向。
2. 传感器选择为了实现对环境亮度和人体位置的检测,我们选择了光敏电阻和红外传感器作为传感器。
光敏电阻可以检测环境亮度,并将其转化为电信号输出;红外传感器可以检测人体位置,并将其转化为数字信号输出。
3. 控制算法控制算法是整个系统的核心部分,它决定了最终的光源方向。
我们采用PID控制算法来实现自动跟踪功能。
PID控制算法通过比较目标值与实际值之间的误差来调整输出量,从而实现对光源方向的控制。
4. 执行器选择为了实现对光源方向的调节,我们选择了舵机作为执行器。
舵机可以根据输入的PWM信号调整自身角度,从而实现对光源方向的调节。
三、系统建模1. 传感器模型光敏电阻和红外传感器都可以用简单的数学模型来描述。
光敏电阻的输出电压与环境亮度成反比,可以用以下公式表示:V = K / L其中V为输出电压,K为常数,L为环境亮度。
红外传感器可以将人体位置转化为数字信号输出。
我们假设人体位置在传感器正前方时输出最大值,离开传感器越远输出越小,并且在一定范围内保持线性关系。
因此,红外传感器的数学模型可以表示为:D = K * (1 - |x| / L)其中D为数字输出值,K、L为常数,x表示人体位置与传感器正前方的距离。
2. 控制算法模型PID控制算法是一种经典的控制算法,在工业自动化领域得到广泛应用。
其基本原理是通过比较目标值和实际值之间的误差来调整输出量,从而实现对被控对象的控制。
PID控制算法可以用以下公式表示:u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t) / dt其中u(t)为输出量,e(t)为误差,Kp、Ki、Kd分别为比例、积分、微分系数。
点光源跟踪系统(四路)

电子设计报告点光源跟踪系统(B题)组员:樊华姚文涵沈洁学校:南京师范大学中北学院专业:电子信息工程指导老师:朱晓舒目录摘要 (3)关键词 (3)一、引言 (4)二、系统方案选择与论证 (5)2.1各种方案设想及论证、优缺点 (5)2.1.1 光敏元件选择方案 (5)2.1.2 光源检测方案 (6)2.1.3 传感器布局方案 (7)2.1.4光电跟踪系统前置放大电路方案 (7)2.1.5 外界环境干扰及其消除方案 (8)三、理论分析与计算 (8)3.1 LED亮度可调电路的理论分析与计算 (8)3.2光电跟踪系统前置放大电路理论分析与计算 (9)四、电路与程序设计 (11)4.1系统的硬件设计 (11)4.1.1微处理和微控制系统单片机 (11)4.1.2电机类型选择 (11)4.1.3系统供电电源设计 (11)4.1.4点光源LED亮度可调电路 (12)4.1.5 光电跟踪系统前置放大电路(跨阻放大器) (12)4.1.6步进电机驱动电路 (12)4.1.7 机械部分的设计 (12)4.1.8系统总体硬件电路框图 (13)4.2系统的软件设计 (13)4.2.1 软件设计总体思想 (13)4.2.2 系统软件结构设计框图 (13)五、测试方案、结果及分析 (15)六、部分设计亮点及调试难点解决方案 (16)6.1 硬件电路设计创意 (16)6.2 用光的特性(直线性)设计检测方法,进行位置精确定位 (16)6.3 软件部分控制精髓 (17)七、总结 (17)八、结束语 (17)九、附录 (18)附录一:系统+12V、+5V供电电源电路图 (18)附录二:LED亮度可调电路 (18)附录三:光源跟踪系统前置放大电路(I-V转换电路) (19)附录四:TLV1544 AD转换电路 (19)附录五:步进电机驱动电路图 (19)附录六:整机系统相关电路图 (20)附录七:整机系统实物图 (20)十、参考文献 (21)摘要本设计以TI公司的超低功耗MCU MSP430 处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统,该光源跟踪系统能够跟踪点光源位置并由激光笔尽快指向点光源的光电方式定位,以考核光源跟踪系统跟踪点光源的灵敏度以及激光瞄准点光源的精确性来评判设计完成指标。
基于MSP430的点光源跟踪系统的设计
中图分类号:TP311 文献标识码:A 文章编号:1009-2552(2010)11-0160-03基于M SP430的点光源跟踪系统的设计朱丽霞(常州轻工职业技术学院,常州213164)摘 要:系统是以T I公司的超低功耗M C U M SP430为核心,利用光敏二极管排列成矩阵对摄像头采集点光源在液晶屏所成的像进行采样,经过单片机运算后适时的调整和控制步进电机来实现工作台X/Y方向移动,以达到精确定位的目的。
经过实际的参数的测试和分析,验证了系统的可行性和有效性。
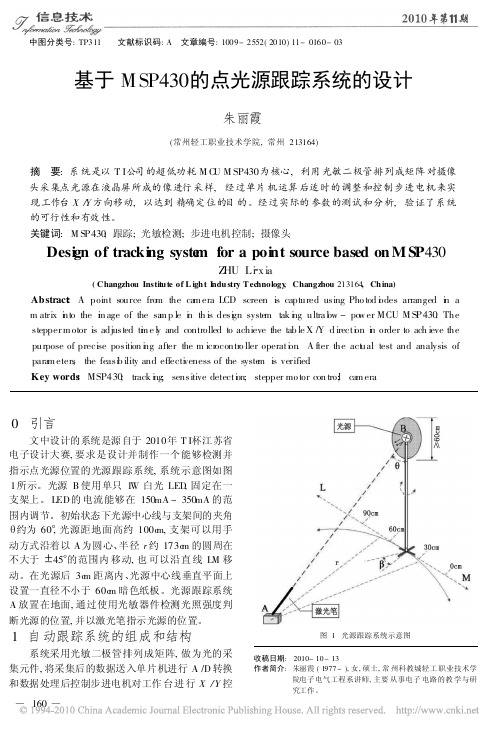
关键词:M SP430;跟踪;光敏检测;步进电机控制;摄像头Desi gn of tracki ng syste m for a poi nt source based on M SP430Z HU Li x ia(Changzhou Institu te of L igh t I ndu stry T echnology,Changzhou213164,Ch ina) Abstract:A point source fro m the ca m era LCD screen is captured using Pho tod i o des arranged i n a m atrix i n to the i m age of the sa m p le i n th is desi g n syste m tak i n g ultra l o w-po w er MCU M SP430.The stepper m otor is adjusted ti m e l y and controlled to achieve the tab le X/Y d irecti o n i n order to ach ieve the purpose of precise position i n g after the m icr ocontr o ller operati o n.A fter the act u al test and analysis of para m eters,the feasi b ility and effecti v eness of the syste m is verified.Key words:MSP430;track i n g;sensitive detecti o n;stepper mo tor con tro;l ca m era0 引言文中设计的系统是源自于2010年T I杯江苏省电子设计大赛,要求是设计并制作一个能够检测并指示点光源位置的光源跟踪系统,系统示意图如图1所示。
电光源跟踪系统软件设计

基于单片机msp430的点光源跟踪系统软件设计设计总说明随着太阳能技术的不断成熟,太阳能在人们的生活中扮演越来越重要的角色。
点光源跟踪技术正源于对太阳跟踪的需要。
本设计采用TI公司的MSP430F149单片机作为控制核心。
利用4路光敏三极管(3DU33)来检测点光源的位置并将检测到的信号经过放大传给控制器MSP430F149单片机,经过单片机的运算和处理来确定点光源的运动趋势,并将运算的控制信号传给两台步进电机,使其跟随点光源运动。
当水平方向上的2路光敏三极管测量数值相对接近,同时竖直方向上的2路光敏三极管测量数值也相对接近时,位于竖直传感器中间的激光笔将精确的指向点光源。
同时将光敏三极管检测的信号显示在LCD液晶屏幕上。
该系统主要包含3个模块分别是AD转换模块,LCD显示模块,步进电机控制模块。
其中步进电机的控制是核心,正是通过对步进电机的控制实现对点光源的跟踪,最后会通过proteus进行仿真。
关键词:MSP430;跟踪;AD转换;步进电机;仿真Msp430 microcontroller-based point source tracking systemSoftware DesignDesign DescriptionWith solar energy development, solar energy technologies of the people's lives play more and more important role. some sources of tracing is on the track's needs. The text of the "monolithic integrated circuits to control msp430f149 as the core. Using 4 phototransistor (3DU33) to detect the location of a point source is detected and amplified signal to pass the controller MSP430F149 microcontroller, operation and processing through the MCU to determine trends in the movement of light source, and operation of the control signal transmission to two stepper motors, to follow the point source movement. When the horizontal direction, 2-way phototransistor relatively close to measured values, while 2-way vertical phototransistor on the measured values are relatively close, the sensor is located in the middle of the vertical laser pointer to point to the exact point of light. Phototransistor detected the same time are shown on the LCD liquid crystal screen.This system mainly include three modules is AD conversion module, LCD display module, stepping motor control module. Among them the step motor control is the core, it is through the control of stepping motor of point light realize the tracking. Will finally pass proteus, and simulation of proteus software.Key Words: MSP430; tracking;Ad switch ;stepper motor ; simulation目录1绪论 (1)2硬件组成 (2)2.1MSP430F149简介 (2)2.2步进电机简介 (3)2.2.1步进电机的构造 (4)2.2.2步进电机的运转原理 (4)2.2.3步进电动机的特征 (4)2.3主要电路 (5)2.3.1电流检测电路 (5)2.3.2电机驱动电路 (6)2.3.3 液晶显示电路 (6)2.3.4复位电路 (6)2.3.5 晶振电路 (7)3软件总体方案设计 (8)3.1 C语言基础 (8)3.2 软件开发平台 (9)3.2.1IAR简介 (9)3.2.2IAR应用 (9)3.3主程序模块 (12)3.4信号采集模块 (14)3.5LCD显示模块 (15)3.6步进电机控制模块 (23)4仿真 (26)4.1 Proteus简介 (26)4.2电路仿真 (28)4.3 系统调试结果 (28)5 总结 (31)致谢 (32)参考文献 (33)附录 (34)1绪论当今社会能源日益紧缺,新能源的开发利用成了十分重大的课题。
基于单片机msp430的点光源跟踪系统设计
基于msp430的点光源跟踪系统设计周小军 何志龙 武小栋摘要 本设计采用MSP430F149 单片机作为整个系统的控制核心,利用4个光敏三极管来接收点光源发出的光并将检测到的信号放大后传给控制器MSP430F149单片机,经过单片机的运算和处理来确定点光源的位置,并将运算的控制信号传给两台步进电机,使其跟随点光源运动。
当水平方向上的2路光敏三极管测量数值相对接近,同时竖直方向上的2路光敏三极管测量数值也相对接近时,位于传感器中间的激光笔将精确的指向点光源。
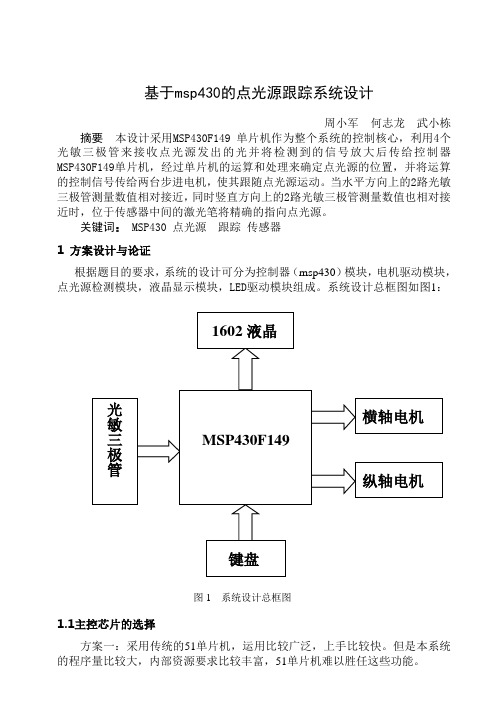
关键词: MSP430 点光源 跟踪 传感器1 方案设计与论证根据题目的要求,系统的设计可分为控制器(msp430)模块,电机驱动模块,点光源检测模块,液晶显示模块,LED 驱动模块组成。
系统设计总框图如图1:1.1主控芯片的选择 方案一:采用传统的51单片机,运用比较广泛,上手比较快。
但是本系统的程序量比较大,内部资源要求比较丰富,51单片机难以胜任这些功能。
光敏三极管键盘MSP430F149 1602液晶纵轴电机 横轴电机 图1 系统设计总框图方案二:采用MSP430F149低功耗单片机,其I/O口资源丰富,有12位AD转换、16位定时器、精密的比较器等,信息处理功能强大,能够很好的实现系统的要求。
故选择此方案。
1.2电动机的选择本系统电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:方案一:步进电机。
在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
每给一次脉冲信号,电机能够转过一个步距角。
方案二:直流减速电机。
此电机在正常通电状态下,转速平稳,角度的变化也近乎连续,控制简单方便。
根据设计的要求可知,直流减速电机的速度不容易控制,而步进电机的控制和实现相对简单一些。
因而选用方案一。
1.3电动机驱动方案的选择本系统中选的是步进电机,步进电机驱动有一下三种方案可选择:方案一:采用功率三极管作为功率放大器的控制步进电机。
基于光敏技术的点光源跟踪系统的设计

3—3 V; 电源 : . 0 双 ±15一±1 V。 5
体 光敏 器件 具有 灵 敏度 高 、 谱 响应 范 围宽 、 光 重量
轻、 机械 强度 高 、 冲击 、 耐 抗过 载 能力强 、 散 功率 耗 大 以及 寿命 长等 特点 。同时 考虑 到本 设计 需要
1 2 设 计方 案选 择 .
1 2 1 恒 流 源 的选 择 . .
对 于恒 流 源 电路 , 设 计 选 用 L 5 本 M3 8芯 片构
成恒 流 源 。L 3 8内部 包 括 有 两 个 独 立 的 、 M5 高增
个 不透 光 的 圆 筒 中 , 筒 上 部 安 装 透 镜 , 圆 以便 聚
控 制舵 机 带 动 激 光 笔 指 向光 源 。 关 键词 MS 4 0 4 7 L 5 T V 1 73 3 rg 1 7 光 敏 电 阻 P 3 F 2 0 M3 8 L 1 1 —. e l 1
中 图分 类 号
T 2 P3
文 献 标 识 码 B
文章 编 号 10 — 3 (0 1 0 —2 1 3 0 03 2 2 1 )309 - 9 0
在 太 阳能 电池 、 阳能 热 水 器等 很 多 领 域 中 太
实现元 器 件在 结 构 上 的连 续 排 列 , 因此 本 设 计 采
用光 敏 电阻 。
2 系统 实 现
都 要对 光 源进 行 跟 踪 , 样 做 能 够 使 太 阳能 设 备 这 的工作 效率 、 量 吸 收率 更 高 。笔 者 利 用 激 光 笔 能
流, 使用 更灵 活 … 。 1 2 2 光敏 器件 的选 择 .. 光敏 器件 包 括 光 敏 二极 管 、 敏 三 极 管 及 光 光 敏 电阻等 。其 中光 敏 电阻是 利 用光 的入 射 引起 半 导 体 电阻 的变 化来 进行 工作 的。光 敏 电阻属 半 导
点光源跟踪系统设计
moos r elsr e s n c uaep s inn . M3 tpc l o s n—urn o recrutmpe ne dutbe tr i e n da c lt o io ig L ia c nt t re t uc i ii lme tsaj s l dv a p a t 1 y 7 a c s c a so et du t E g t i —5 mA. h oess m eyg o o ltdwi i ese i e a g a kn c p a js L D l hs n1 03 0 o i 5 T ewh l y t i v r o dc mpe t nt p cf drn et c ig e s e h h i r
1 引言
文 中设计 的系统 是源 自于 2 1 0 0年 T 杯湖北省 电子 I 设计 大赛 , 要 求是设计 并制作 一个 能够检 测并指 示点 光源位置 的光源 跟踪 系统 ,系统示意 图如 图 1 所示 。光 源 B使用单只 1 白光 L D,固定在一支架上 。L D的 W E E 电流能够在 1 0 3 0 mA 5 5 mA 的范 围内调节 。初始状 态 下光 源 中心线与 支架 间的夹角约为 6 。 光源距地 面 0,
a d p n i h o r e i rg t e sc a g s i a o d a a t b lt . n oi tlg ts u c n b i h n s h n e , th s g o d p a iiy KEY ORD S t p i g mo o ; S 4 0 h t c n u tv e it n e c n t n — u r n o r e W :se p n t r M P 3 ;p O O O d c i e r s s a c ; o s a tc r e ts u c
点光源跟踪设计报告
“点光源跟踪系统”的设计与实现摘要:本点光源跟踪系统由MSP430F5438单片机、bh1750fvi-e光强传感器,LED 灯和云台等组成闭环控制系统,主要模块有LED驱动电路模块、云台控制模块和光能检测模块。
在芯片TPS61062控制的驱动电路作用下产生电流可调的点光源,通过光能检测模块比较各方位光照强度,控制不同继电器的导通从而控制云台向某个方向转动,实现追光功能。
而且,需要校准时也可以用红外进行手动调节。
关键词:MSP430单片机,光能检测,云台控制“The point source Tracking System” 的设计与实现Abstract:The point source tracking system by the MSP430F5438 MCU, bh1750fvi-e light intensity sensors, LED lights and head composed of closed-loop control system, the main module has LED driver circuit module, PTZ control module and the light detection module. TPS61062 chip under the control of drive circuit produces current adjustable light source, light detection module by the parties to place light intensity compared to control conduction of different relays to control head rotation in a certain direction, to achieve functional recovery of light. Moreover, the need for calibration can also be adjusted manually using infrared.Key Words:MSP430 microcontroller, light detection, PTZ control一、方案比较与论证1、LED驱动模块的方案比较与论证方案一:用电源直接在LED的两端加一个电压使LED发光,但这样需要一个可调电压源,通过调节电压来改变LED的电流,从而实现亮度的调节,由于电压的调节很难实现精确的步进,使得这种调节方式线性度很差,给我们监测电流造成了一定的难度,而且这种方案容易损坏LED灯,故未采用此方案。
点光源跟踪系统设计方案
点光源跟踪系统设计报告设计题目一、任务设计并制作一个能够检测并指示点光源位置的光源跟踪系统,系统示意图如图1所示。
光源B使用单只1W白光LED,固定在一支架上。
LED的电流能够在150~350mA的范围内调节。
初始状态下光源中心线与支架间的夹角θ约为60º,光源距地面高约100cm,支架可以用手动方式沿着以A为圆心、半径r约173cm的圆周在不大于±45º的范围内移动,也可以沿直线LM移动。
在光源后3 cm距离内、光源中心线垂直平面上设置一直径不小于60cm暗色纸板。
光源跟踪系统A放置在地面,通过使用光敏器件检测光照强度判断光源的位置,并以激光笔指示光源的位置。
图1 光源跟踪系统示意图二、要求1.基本要求(1)光源跟踪系统中的指向激光笔可以通过现场设置参数的方法尽快指向点光源;(2)将激光笔光点调偏离点光源中心30cm时,激光笔能够尽快指向点光源;(3)在激光笔基本对准光源时,以A为圆心,将光源支架沿着圆周缓慢(10~15秒内)平稳移动20º(约60cm),激光笔能够连续跟踪指向LED点光源;2.发挥部分(1)在激光笔基本对准光源时,将光源支架沿着直线LM平稳缓慢(15秒内)移动60cm,激光笔能够连续跟踪指向光源。
(2)将光源支架旋转一个角度β(≤20º),激光笔能够迅速指向光源。
(3)光源跟踪系统检测光源具有自适应性,改变点光源的亮度时(LED驱动电流变化±50mA),能够实现发挥部分(1)的内容;(4)其他。
三、说明1.作为光源的LED的电流应该能够调整并可测量;2.测试现场为正常室内光照,跟踪系统A不正对直射阳光和强光源;3.系统测光部件应该包含在光源跟踪系统A中;4.光源跟踪系统在寻找跟踪点光源的过程中,不得人为干预光源跟踪系统的工作;5.除发挥部分(3)项目外,点光源的电流应为300±15 m A;6.在进行发挥部分(3)项测试时,不得改变光源跟踪系统的电路参数或工作模式;四、评分标准设计报告项目分数系统方案 2 理论分析与计算8 电路与程序设计9 测试方案与测试结果8 设计报告结构及规范性 3小计30基本要求完成第(1)项10 完成第(2)项20 完成第(3)项20小计50发挥部分完成第(1)项15 完成第(2)项15 完成第(3)项15 其他 5小计50总分130设计总方案一:系统概述本设计是一个点光源追踪系统,主要由传感器来对光照检测与处理,控制器分析与处理,执行机构运行和模块显示这几个部分构成。
点光源跟踪系统
点光源跟踪系统摘要:本系统以STM32单⽚机作为控制处理核⼼,设计并制作了⼀个能够检测并指⽰点光源位置的光源跟踪系统。
该系统的主电路主要由传感器模块、步进电机驱动模块、液晶显⽰模块和电源模块组成,将光敏三极管、光敏电阻、激光笔与步进电机固定,利⽤光敏三极管和光敏电阻检测光照强度判断光源位置,控制步进电机转动来调整传感器和激光笔的转动⾓度,从⽽跟随点光源的移动⽽转动,准确跟踪点光源。
本系统还具有⼈机交换界⾯,各参数及测试模式可由键盘输⼊并显⽰,智能性好,反应速度快,最终完成了题⽬的所有基本指标及全部发挥部分的要求。
关键词:STM32;光敏三极管;光敏电阻;光源跟踪⼀、系统⽅案1.1整体⽅案描述本系统由点光源和光源跟踪模块两⼤部分构成,以STM32单⽚机为控制核⼼实现了点光源识别、点光源跟踪、模式设定、液晶显⽰及激光笔精确指⽰等功能。
光源由功率LED组成,通过改变回路中滑动变阻器的阻值⼤⼩,来改变功率LED 电流的⼤⼩,使电流能在150mA~350mA的范围内调节。
光源跟踪模块由STM32单⽚机、步进电机、传感器电路、激光笔组成。
当点光源移动时,传感器电路的光敏三极管和光敏电阻检测到点光源强度发⽣改变,通过STM32单⽚机AD采样处理,控制步进电机的转动,使激光笔始终指向点光源中⼼,即达到点光源跟踪的⽬的。
本系统总体结构框图如图1所⽰。
图1 系统总体结构框图1.2⽅案⽐较与选择1.1.1光源检测⽅案选择⽅案⼀:由光敏元件检测中⼼线处的光源强度,实现光电转换,通过AD采样,检测电压的变化,设计算法实现光源⽴体坐标的检测。
此⽅案运⽤软硬结合的⽅法可以检测出光强的微⼩变化,硬件电路和算法都⽐较简单。
⽅案⼆:硅光电池检测中⼼线处的光源强度,实现光电转换,通过电压⽐较器检测电压的微⼩变化,处理过程基本由硬件完成,调试过程复杂。
综合上述⽐较,考虑到本系统抗⼲扰能⼒要求较⾼,采⽤光敏元件检测,硬件结构简单,环境适应性较强,故选择⽅案⼀。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点光源跟踪系
组员:陈红芳韩思宇代金龙马文鹏徐伟杰陈国陆
摘要:本文设计的是一个点光源跟踪系统,主要由光敏电阻检测,运放分析处理,执行机构运行,这几个部分构成。
整个系统是以LM358P 为控制核心,通过4个光敏电阻来检测光照,依据光照强度的变化、大小来判断出点光源的位置与运动趋势,并将点光源运动分解为水平和竖直方向的二维运动,借以来控制水平电机与竖直电机的旋转角度,以达到跟踪光源的效果。
关键词:点光源定位,二维运动分析,LM3S1138
一、系统方案设计与论证
1.主控芯片
根据本题的要求,整个系统中必须要有一个主控芯片来处理数据和控制操作,主要考虑以下两种方案:
方案一:MSP430系列单片机。
16位低功耗单片机,性能良好。
方案二:Cortex-M3系列。
具有32位处理器内核的高性能处理器,具有强大的控制、处理能力,丰富的外围模块,稳定的系统,提供方便高效的开发环境。
本系统选取Cortex-M3系列的LM3S1138作为控制器,LM3S1138支持低功耗模式,性能稳定,内置嵌套向量中断控制器,在控制、处理数据速度上有优势,并含有丰富的外围模块,所以选择方案二。
2.传感器的选择
本系统的传感器主要是检测光照度,可考虑的传感器如下列方案:
方案一:光敏电阻。
从光照特性来看,随着光照强度的增加,光敏电阻的阻值开始迅速下降,可以反映光照的变化,但该特性大多数情况为非线性,部分光照区间内,特性变化不灵敏。
方案二:硅光电池。
硅光电池是一种直接把光能转换为电能的半导体器件,根据硅光电池光照强度曲线特性可知,硅光电池的开路电压或短路电流与光强成很好的线性关系。
方案三:光敏二极管。
光敏二极管具有单向导电性,无光照时,有很小的暗电流,当受到光照时,光电流随射光强度的变化而变化。
方案四:光敏三极管。
原理与光敏二极管相同,但是与光敏二极管相比,它具有很大的光电流放大作用,即很高的灵敏度,因此传感器选择方案四。
3.电机的选择
电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:
方案一:步进电机。
在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
每给一次脉冲信号,电机能够转过一个步距角。
可以调节为1/8细分模式,走不准确,PWM调节方便方案二:舵机。
舵机的控制信号为周期是20ms的脉宽调制(PWM)信号,其中脉冲宽度从0.5ms-2.5ms,相对应舵盘的位置为0-180度,呈线性变化,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上,舵机运行稳定,控制方便,恰好用于精确定位。
综上所述,水平轴扫描由步进电机控制,竖直轴扫描由舵机控制,舵机选用微舵机,便于步进电机可以带动舵机运动。
4.点电源的供电方案
方案一:采用LED驱动芯片TPS61062。
方案二:采用功率驱动芯片TIP122多LED进行驱动,经过试验方案一电流达不到要求,方案二满足要求,故选用方案二。
5.总体方案确定
综上,本系统最终以LM3S1138作为控制器,用光敏三极管做检测元件,通过控制步进电机和微舵机来使激光笔指向点光源。
图1 系统整体框图
二、理论分析与计算
1.传感器布局分析与计算
根据第一、二类点光源的特性及光照亮度来追踪光源的原理,依据简易、精确控制与节约资源的原则,本设计采用两类八路照度检测通道。
垂直直观图如图2所示。
外圈为圆盘,内圈为套筒,外圈排布四路传感器用于粗调,内圈四路传感器用于精调,两类检测元件水平、垂直排布分别用于水平面、竖直面定位,布局相对对称。
此外,考虑到外界强光的影响,在传感器的前端加黑色圆筒处理。
实践证明,这样的处理能够有效地避免外界干扰,达到更良好的控制。
2.光照度分析
对光源移动过程中某一瞬间进行如下分析:
假设传感器模块受点光源C 的光照,设点光源C 至传感器模块距离为r ,并且点光源发出的某一光束的光轴与水平排布传感器的法线N 之间的夹角为α ,则该传感器上的照度如下公式所示:
2cos E r I ds d αϕ==同理,B 点也可得出。
就水平方向而言,当且仅当21r r =时,即光源C 处在AB 的垂直平分线上时两个传感器的照度,此时便为最终的追踪状态因为竖直方向与水平方向的分布相同,当43E E =时,点光源位于竖直传感器中间。
设置激光笔的位置在竖直传感器的中间,当水平与竖直方向同时满足条件时,激光笔将准确定位在光源中心处。
图2 传感器分布图 图3 光照度分析图 三、硬件电路设计
1.传感器检测电路
传感器检测光照后,输出的模拟量经过放大、限幅处理后经由PORT1接入AD 采样通道。
图4 传感器检测电路
2.点光源电流控制电路
选取LED亮度控制器,输出电流经大功率三极管TIP122后,接入负载。
并且经由后续电路采样电压,从而计算得出流过LED的电流值。
PORT3是由主处理器1的DA提供的可变电压,由键盘来设定电压大小,然后经过射极跟随器和信号放大后驱动TIP122工作,从而达到键盘可控电流从150mA~350mA变化的目的。
PORT4用来接入主处理器1的AD进行电压采样,从而计算得出电流值用LCD显示
图5 点光源电流控制电路
3.电机驱动电路
采用电机驱动芯片TA8435驱动步进电机,舵机直接接入5V电压即可,下图的PORT5、PORT6、PORT7分别为使能、正反转和时钟控制输入端。
图6 电机驱动电路
四、程序设计流程
系统初始化部分:控制器的配置
程序主体流程部分包括:光照度检测,数据对比处理,状态分析、控制执行机构并循环。
模式1:静止扫描,控制系统上电后,按下程序启动按键,通过设置步进电机的转动角度和舵机的转动角度对LED灯的黑色屏幕区域逐层进行扫描,知道检测到光源并且激光笔对准光源时停止扫描。
模式2:动态追踪,控制系统上电后,按下程序启动按键,按下K1键,控制系统会进入到检测状态,在检测状态中,通过对比两类传感器中各类的1、3和2、4电压值来实现激光笔向上、向下、向左、向右四个方向的调节。
经过一段后,系统会自动调节使得激光笔的指示位置与点光源的位置接近,从而达到对点光源的自动跟踪效果。
图7 程序流程图
五、测试方案与结果
1.测试方法与过程
由理论分析可知,本系统对传感器的精度要求比较高。
主要就是微调传感器的角度。
测试前的准备:先给点光源通电,调整点光源的电流值,达到规定范围内,然后在给其余设备供电后系统直接进入检测传感器是否能够正常工作状态。
然后,手动使激光笔对准光源,查看四个传感器的光照的测量情况,主要是使水平方向的两个传感器的测量值相对接近,竖直方向的两个传感器的测量值也相对接
近,便于调节在此均调节为2.5V,微调节控制台,传感器的测量值有显著地变化,接着按启动按键,就可以测试。
测试方法:在测试前的准备工作结束后,先让其自动运行,在自动找到点光源,并且激光笔正确指示后,沿题目中所示方向(圆周和直线)方向调整光源,观测结果。
2.测试仪器及材料
毫米刻度尺,数字万用表,点光源支架
3.测试结果以及拓展
点光源位置不变,移动激光笔的指示位置,测量数据如下表:
表1:点光源位置不变的测量数据
点光源沿圆周运动,测量数据如下表:
表2:点光源沿圆周运动的测量数据
点光源沿直线运动,测量数据如下表:
表3:点光源沿直线运动的测量数据
点光源在激光笔支架前的一定空间范围内运动,测量数据如下表:
表4:点光源在一定空间范围内运动的测量数据
经过反复调试,在规定区域内,激光笔能够在5S内精确指示,误差在3cm 之内。
此外,经测试,本系统的拓展部分:只要点光源能正对激光笔,任意方向的局部移动也可追踪。
六、设计总结
综合上述各部分的分析与测试结果,本设计很好的完成了题目的基本要求,还较好的完成了绝大部分发挥内容。
并且自己设置了在一定空间范围内移动光源的扩展环节,也很好的实现了点光源跟踪。
通过本次的设计竞赛,我们懂得了理论联系实际的重要性,学到了很多东西,受益匪浅。