点光源追踪系统
点光源跟踪系统论文
摘要:本文设计的是一个点光源追踪系统,主要由光照传感器的照度检测与处理,控制器分析与处理,执行机构运行和模块显示这几个部分构成。
整个系统是以LM3S811为控制核心,通过四个可见光照度传感器来检测光照,依据光照度的变化、大小来判断出点光源的位置与运动趋势,并将点光源运动分解为水平和竖直方向的二维运动,借以来控制水平电机与竖直电机的旋转角度。
当水平方向上的两传感器的测量数值相对接近,同时竖直方向上的两传感器的测量数值也相对接近时,位于竖直传感器中间的激光笔将精确的指向点光源。
除基本要求满足外,本系统设计了一些拓展环节:在点光源正对及电机运动幅度允许的条件下,激光笔可追踪任意方向移动的点光源,也可换速度档,达到迅速调节的目的。
关键字:点光源定位寻迹二维运动分析直流减速电机控制LM3S811一.系统方案设计1.主控芯片根据本题的要求,整个系统中必须要有一个主控芯片来处理数据和控制操作,主要考虑以下两种方案:方案一:MSP430系列单片机。
16位低功耗单片机,性能良好。
方案二:Cortex-M3系列。
32位处理器内核高性能处理器,具有强大的控制、处理能力,丰富的外围模块,稳定的系统,提供方便高效的开发环境。
本系统选取Cortex-M3系列的LM3S811作为控制器,LM3S811支持低功耗模式,性能稳定,内置嵌套向量中断控制器,在控制、处理数据速度上有优势,并含有丰富的外围模块,所以选择方案二。
2.传感器的选择本系统的传感器主要是检测光照度,可考虑的传感器如下列方案:方案一:光敏电阻。
从光照特性来看,随着光照强度的增加,光敏电阻的阻值开始迅速下降,可以反映光照的变化,但该特性大多数情况为非线性,部分光照区间内,特性变化不灵敏。
方案二:硅光电池。
硅光电池是一种直接把光能转换为电能的半导体器件,根据硅光电池光照强度曲线特性可知:硅光电池的开路电压或短路电流与光强呈很好的线性关系。
方案三:光敏二极管。
光敏二极管具有单向导电性,无光照时,有很小的暗电流,当受到光照时,光电流随射光强度的变化而变化。
点光源跟踪系统(四路)

电子设计报告点光源跟踪系统(B题)组员:樊华姚文涵沈洁学校:南京师范大学中北学院专业:电子信息工程指导老师:朱晓舒目录摘要 (3)关键词 (3)一、引言 (4)二、系统方案选择与论证 (5)2.1各种方案设想及论证、优缺点 (5)2.1.1 光敏元件选择方案 (5)2.1.2 光源检测方案 (6)2.1.3 传感器布局方案 (7)2.1.4光电跟踪系统前置放大电路方案 (7)2.1.5 外界环境干扰及其消除方案 (8)三、理论分析与计算 (8)3.1 LED亮度可调电路的理论分析与计算 (8)3.2光电跟踪系统前置放大电路理论分析与计算 (9)四、电路与程序设计 (11)4.1系统的硬件设计 (11)4.1.1微处理和微控制系统单片机 (11)4.1.2电机类型选择 (11)4.1.3系统供电电源设计 (11)4.1.4点光源LED亮度可调电路 (12)4.1.5 光电跟踪系统前置放大电路(跨阻放大器) (12)4.1.6步进电机驱动电路 (12)4.1.7 机械部分的设计 (12)4.1.8系统总体硬件电路框图 (13)4.2系统的软件设计 (13)4.2.1 软件设计总体思想 (13)4.2.2 系统软件结构设计框图 (13)五、测试方案、结果及分析 (15)六、部分设计亮点及调试难点解决方案 (16)6.1 硬件电路设计创意 (16)6.2 用光的特性(直线性)设计检测方法,进行位置精确定位 (16)6.3 软件部分控制精髓 (17)七、总结 (17)八、结束语 (17)九、附录 (18)附录一:系统+12V、+5V供电电源电路图 (18)附录二:LED亮度可调电路 (18)附录三:光源跟踪系统前置放大电路(I-V转换电路) (19)附录四:TLV1544 AD转换电路 (19)附录五:步进电机驱动电路图 (19)附录六:整机系统相关电路图 (20)附录七:整机系统实物图 (20)十、参考文献 (21)摘要本设计以TI公司的超低功耗MCU MSP430 处理器为核心设计并制作一个能够检测并指示点光源位置的光源跟踪系统,该光源跟踪系统能够跟踪点光源位置并由激光笔尽快指向点光源的光电方式定位,以考核光源跟踪系统跟踪点光源的灵敏度以及激光瞄准点光源的精确性来评判设计完成指标。
点光源追踪系统设计
点光 源追 踪 系统 设 计 米
李 超 王再 明 甘 铭 韦稳稳 刘 刚
( 石理 工 学 院 电气 与 电子 信 息工程 学 院 , 北 黄 石 450 ) 黄 湖 30 3
摘 要 : 旨在设计一个模拟强点光源追踪装置 , 以提高光源 的利用率 。装置 由模 拟强光源和光 源追 踪2 部分构成。模拟强光源装置采用 T 公司的 L 37组成可调恒流源装置控制 1W 高亮度 L D光 I M 1 E 源, 并且使用电阻分流和 MS4 0 4 P3 f 7内部 A C采样数显 。追踪装置采用 A m l 1 D T e 公司的 A m gl T ea6高 性能 A R单 片机作为主控芯片 , V 将采集到的信号进行综合判别和处理 , 然后控制舵机实现对光 源的 跟踪 , 并可实现手动校准 。 关 键词 : 点光源 ; 跟踪系统 ; 光敏 电阻 ;T ea6 A m g1
注, 如何 提高太 阳能资源 的利用效 率 已经成 为 当今 世 界 能 源 行 业 重 要 的 话 题 。本 系 统 旨 在 设 计 一 个 模 拟 强 点 光 源 追 踪 装 置 , 提 高 光 源 以
的利用率 。装 置 由模 拟 强 光 源 和光 源追 踪 2 部分 构 成 。模 拟 强 光 源装 置 采 用 , I ' 司 的 I公 L 1 M3 7组 成 可 调 恒 流 源 装 置 控 制 1W 高 亮 度
L C a WA / ho NG i n Za mig
G N A
WEI We we L U n n n I Ga g
(co eraa er iIo ao Egei , un hIt toT hog, u g i ue450) S ooE ciln E tn fmtn nn rg Ha s su no H a s b 03 h lflt d l o cn r i ien c c g ini ef e ly n hH i3 t c
点光源跟踪系统
所以有:
电压: U = 3.3V +12× I
故电压范围为:5.1V~7.5V
R1 + R2 + R3 7.5
R1 + R2 + R3 5.1
=
=
由图可得: R3
1.24 ① ; R2 + R3 1.24 ②
R2 + R3 = 7.5 由式①②得: R3 5.1
取 R2 为 20 kΩ,则有 R3 = 2.152R2 = 42.5kΩ , R1 = 194.56kΩ 所以取 R1 阻值为 200kΩ ,R3 阻值为 47kΩ。
方案二:采用 TPS61087 做 LED 驱动模块。TPS61087 是具有强制 PWM 模 式的 650kHz/1.2MHz 升压 DC-DC 转换器,输入电压范围为 2.5~6V,输出电压可 高达 18.5V。采用 TPS61087 的驱动电路的输出电流可达 500mA 以上,足够用来
-1-
驱动 150~350mA 范围的白光 LED。因此本设计采用方案二。
-6-
八 附录
原理图一:LM3S1138 的最小系统
R5 10k
3.3V
3.3V
2.5V
3.3V
U1
AMS1117
5V
1 Vin
J1
+ C1
2 1
47uF C3 0.33uF
+5V GND
3.3V
C9
C10
100nF 100nF
Vout 3
+ C2 47uF C4
J6 CON26 D4
LED R14
1.2 光敏传感器的选择与论证
方案一:采用光敏电阻检测光照强度。它 在 强 光 照 射 下 光 电 转 换 线 性 较 差, 频率响应很低。
点光源跟踪系统设计报告
点光源跟踪系统(B题)方案设计报告摘要:本方案使用TI公司生产的MSP430F247为主控芯片,以TPS61062为核心设计了白光LED驱动电路,应用OPA2335作放大器制作了光源检测电路。
本系统利用以激光笔为中心水平和垂直方向上对称分布的四个光敏三极管为探测端接收光源信号,再利用自适应环境算法、电机分段调速等多种算法实现激光束对白光光源的实时跟踪。
本系统成功完成了基础部分和发挥部分的要求,最终定位误差可控制在1.5cm以内。
关键字: 减速步进电机控制LED电流控制自适应算法一、系统方案的选择1.系统测光部件的选择方案一:以四个光敏电阻为探测端分别对称分布于激光笔水平和垂直方向上,中心处即激光束发光点。
利用光敏电阻在不同光强下电阻值的变化与一个定值电阻串联来输出不同分压值进行判断,当光敏电阻正对光源时电压最大,偏离时电压值线性下降。
方案二:使用四个光敏三极管为测光部件采用方案一的布局方式和工作方式制作探测端,但因三极管有β倍的电流放大作用且光源偏离三极管正对方向时电压值下降的波形斜率更大,所以微小位移的幅值变化更明显。
考虑到二者光敏特性曲线的斜率和幅值变化范围等方面因素,故最终选择方案二。
2.光源跟踪系统转动的控制方案选择方案一:光源跟踪系统由双舵机构成“云台”式结构,机械结构简单、稳定,且舵机在两个方向上都可以做到180°自由的转动,转动速度通过PWM波的占空比控制,但舵机本身控制转角的精度可能使连续小角度定位时产生抖动。
方案二:水平方向利用带减速箱的步进电机控制,垂直方向上利用舵机控制转动。
由于减速箱的使用相当于使步进电机的步长角度变得非常小,使在2米外的光源附近的激光束移动时很平滑,可以做到精确步长控制的连续定位,但缺点是减速箱和电机的完全啮合有一定难度,需要较高的机械加工精度。
综上所述,方案一控制方法最为简易,但控制稳定性可能不足;方案二控制精确度高。
由于本次题目应优先考虑稳定性和准确性,故最终选择方案二。
点光源跟踪系统的研究

点光源跟踪系统的研究[摘要] 本系统采用MSP430F2274作为控制核心,通过键盘修改参数,全面实现了题目中的基本要求和发挥部分要求。
建立二维坐标,使用两个舵机分别控制随动系统垂直方向和水平方向,使得激光笔能够更加快速准确的指向光源,尤其是当光源沿直线运动时。
当光源移动30cm时,随动系统能够快速自动找到光源。
[关键词] MSP430 随动系统实时跟踪伺服电机一、方案比较与论证本设计要求实现随动系统能够定点找到光源,随动追踪光源,光源沿弧线和直线运动时均能够找到光源等。
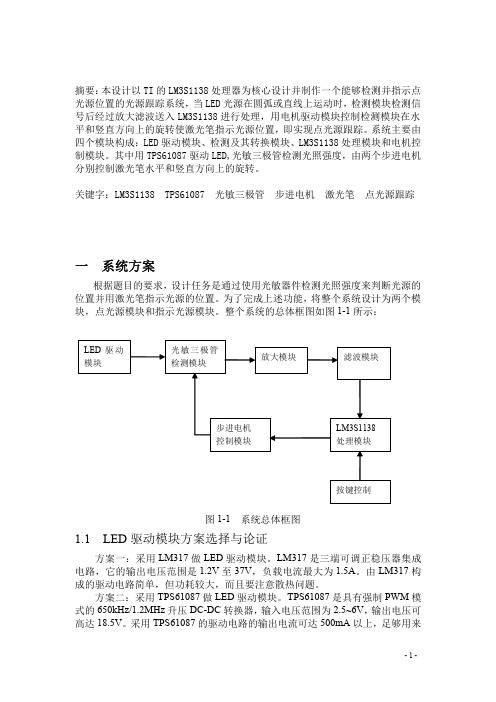
根据题目要求,本系统由单片机、LED光源、捕获光强、放大电路、舵机等五个模块构成,各模块经过多个方案的比较与论证,最终提出了使系统最优化的整个系统方案。
系统总体框图如图B-1所示。
1、捕获光强系统模块捕获光强系统模块主要由光敏三极管、激光笔组成。
方案一:一维随动系统,采用一个光敏三极管和一个激光笔的方式。
如图B-2所示。
G为光敏三极管J为激光笔光敏三极管G位于激光笔J的上方,两者在垂直方向处于同一直线上,以光敏三极管为中心可水平转动。
初始调整位置时,光敏三极管的轴线与激光笔的轴线要相交于光源B。
光敏三极管接收来自光源B的光照,如图B-3。
首先找到让光敏三极管扫描一次,得到最大电压值Um,从而找到最大的光强位置,即光源。
当光源发生移动时,光敏三极管接收到的光强减小,此时控制随动系统跟踪光源的运动方向进行移动。
此方案电路简单,容易调整三极管和激光笔的初始位置。
但是光源沿直线运动时,光敏三极管和激光头的轴线不可能交与一点,导致跟踪光源时出现偏差。
由于随动系统只能水平转动不能垂直转动,导致当光源沿直线LM移动时,激光笔不能准确的指向光源,存在固有误差图B-3三极管接受光源示意图方案二:二维随动系统。
采用四个光敏三极管成十字形排列,一个激光笔位于十字中心。
如图B-4所示。
图B-4方案二其中采用一个伺服电机控制L和R两个光敏三极管三极管用于沿水平方向捕获光强,另一个伺服电机控制S和X用于沿垂直方向捕获光强,最终寻找的光源位置为水平扫描和垂直扫描的交点。
点光源追踪系统
设 计 任 务
文 献 标 识 码 :A
文 章 编 号 :1 0- 9 3 (0 2 8 0 6 — 2 0 6 7 7 2 1 )0 — 0 4 0
一
、
系 统 检 测 部 分 可 采 用 摄像 头 ,摄 像 头 高 速 扫 描 ,通 过 分
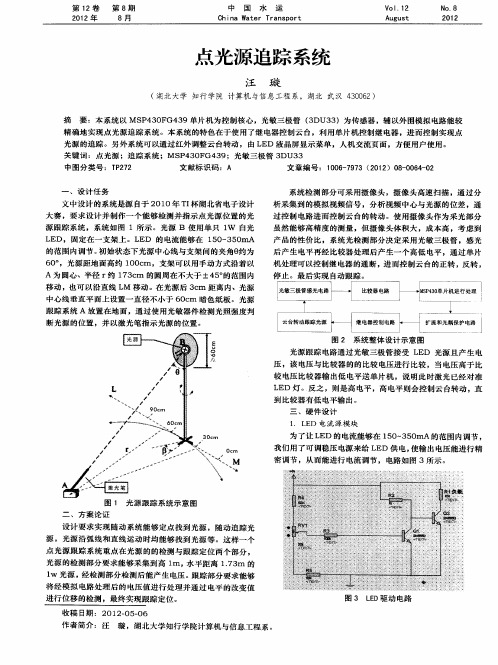
文 中设 计 的系 统 是 源 自于 2 0年 T 杯 湖 北省 电子 设 计 01 I 大 赛 ,要 求 设 计 并 制 作 一 个 能 够 检 测 并 指 示 点 光源 位 置 的 光
进行位移的检测 ,最终实现跟踪 定位 。
收 稿 日期 :2 2 0 — 6 01 — 50
图 3 L D驱 动 电路 E
作者简介:汪
璇 ,湖北大 学知行 学院计算机与信息工程系 。
第 8期
汪
璇 :点 光 源 追 踪 系 统
6 5
在 硬件 调 试 中调 节 变 阻器 R ,可 看 到 负载 R1上 的 电 V1 流 逐 步 变化 ,变 化 范 围可 达 到 1 0 3 0 , 同 时 也可 观 察 2 - 7 ma 到 L D 灯 的 亮度 逐 渐 增 强 。从 而 实 现 L E ED 灯 电流 变 化 下 的 扫 描 与 跟踪 定 位 。
0e a r
我们 用 了可 调 稳 压 电源 来 给 L D 供 电 , 输 出 电压 能 进 行 精 E 使 密 调节 ,从 而 能 进 行 电流 调 节 , 电路 如 光 源 跟 踪 系 统 示 意 图
二 、方 案 论 证
设 计 要 求 实现 随 动 系 统 能 够 定 点 找 到 光 源 ,随 动 追 踪 光
源 跟 踪 系 统 , 系统 如 图 1所示 。 光源 B 使 用 单 只 l 自光 W
基于光敏技术的点光源跟踪系统的设计

3—3 V; 电源 : . 0 双 ±15一±1 V。 5
体 光敏 器件 具有 灵 敏度 高 、 谱 响应 范 围宽 、 光 重量
轻、 机械 强度 高 、 冲击 、 耐 抗过 载 能力强 、 散 功率 耗 大 以及 寿命 长等 特点 。同时 考虑 到本 设计 需要
1 2 设 计方 案选 择 .
1 2 1 恒 流 源 的选 择 . .
对 于恒 流 源 电路 , 设 计 选 用 L 5 本 M3 8芯 片构
成恒 流 源 。L 3 8内部 包 括 有 两 个 独 立 的 、 M5 高增
个 不透 光 的 圆 筒 中 , 筒 上 部 安 装 透 镜 , 圆 以便 聚
控 制舵 机 带 动 激 光 笔 指 向光 源 。 关 键词 MS 4 0 4 7 L 5 T V 1 73 3 rg 1 7 光 敏 电 阻 P 3 F 2 0 M3 8 L 1 1 —. e l 1
中 图分 类 号
T 2 P3
文 献 标 识 码 B
文章 编 号 10 — 3 (0 1 0 —2 1 3 0 03 2 2 1 )309 - 9 0
在 太 阳能 电池 、 阳能 热 水 器等 很 多 领 域 中 太
实现元 器 件在 结 构 上 的连 续 排 列 , 因此 本 设 计 采
用光 敏 电阻 。
2 系统 实 现
都 要对 光 源进 行 跟 踪 , 样 做 能 够 使 太 阳能 设 备 这 的工作 效率 、 量 吸 收率 更 高 。笔 者 利 用 激 光 笔 能
流, 使用 更灵 活 … 。 1 2 2 光敏 器件 的选 择 .. 光敏 器件 包 括 光 敏 二极 管 、 敏 三 极 管 及 光 光 敏 电阻等 。其 中光 敏 电阻是 利 用光 的入 射 引起 半 导 体 电阻 的变 化来 进行 工作 的。光 敏 电阻属 半 导
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2010项目练习
设
计
作
品
作品名称:点光源跟综系统
设计组员:王国凯徐文超蔡露王奇志专业:应用电子技术
指导老师:唐炎明
摘要:本文设计的是一个点光源追踪系统,主要由光照传感器的照度检测与处理,控制器分析与处理,执行机构运行这几个部分构成。
整个系统是以A T89S52为控制核心,通过四个光照传感器来检测光照,依据光照度的变化、大小来判断出点光源的位置与运动趋势,并将点光源运动分解为水平和竖直方向的二维运动,借以来控制水平电机与竖直电机的旋转角度。
当水平方向上的两传感器的测量数值相对接近,同时竖直方向上的两传感器的测量数值也相对接近时,位于竖直传感器中间的激光笔将精确的指向点光源。
除基本要求满足外,本系统设计了一些拓展环节:在点光源正对及电机运动幅度允许的条件下,激光笔可追踪任意方向移动的点光源,也可换速度档,达到迅速调节的目的。
关键字:点光源定位寻迹二维运动分析步进电机控制A T89S52
一.系统方案设计
1.主控芯片
根据本题的要求,整个系统中必须要有一个主控芯片来处理数据和控制操作,主要考虑以下两种方案:
方案一:AT89C51系列单片机。
8位低功耗单片机,性能良好。
方案二:AT89S52系列。
8位处理器内核高性能处理器,具有强大的控制、处理能力,稳定的系统,提供方便高效的开发环境。
本系统选取AT89S52单片机作为控制器,AT89S52支持低功耗模式,性能稳定,在控制、处理数据速度上有优势,,所以选择方案二。
2.传感器的选择
本系统的传感器主要是检测光照度,可考虑的传感器如下列方案:
方案一:光敏电阻。
从光照特性来看,随着光照强度的增加,光敏电阻的阻值开始迅速下降,可以反映光照的变化,但该特性大多数情况为非线性,部分光照区间内,特性变化不灵敏。
方案二:光敏三极管。
光敏三极管具有单向导电性,无光照时,有很小的暗电流,当受到光照时,光电流随射光强度的变化而变化。
在测试光敏电阻,发现光源的距离限制了两者的应用范围。
当距离比较大时,两者的灵敏度大大降低。
经实践测定,光敏三级管传感器满足要求,因此传感器选择方案二。
3.电机的选择
电机的主要作用是调整激光笔的位置,指向点光源,可选取的类型如下方案:方案一:步进电机。
在非超载的情况下,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。
每给一次脉冲信号,电机能够转过一个步距角。
方案二:直流电机。
电机的转速受负载影响,惯性大。
根据设计的要求,步进电机转速平稳,容易控制,因而选用第一种方案。
4.点电源的供电方案
根据题目要求:为产生150mA~350mA的LED驱动电流,采用比例电流源。
经测试可行。
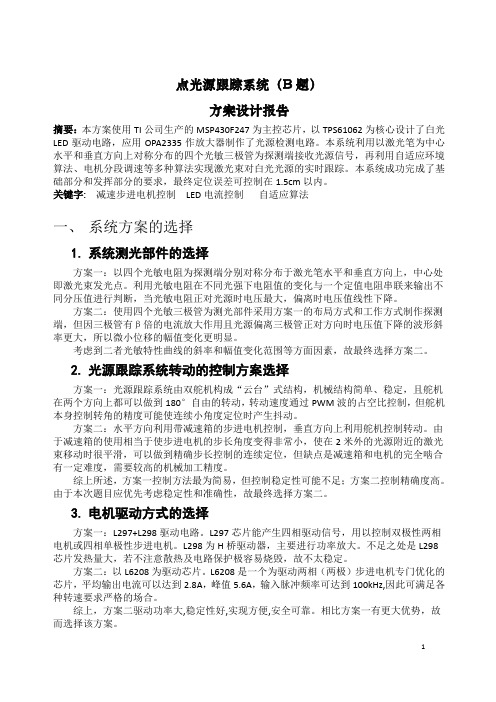
5.总方案的确定
综上,本系统最终以A T89S52作为控制器,用光敏三极管做检测元件,通过控制步进电动机来使激光笔指向点光源。
图1 系统方框图
二.理论分析及计算 1.点光源特性分析
根据题目中的要求,可以将点光源的运动分为沿圆周移动和沿其他任意方向移动两种形式。
空间中的任何一点可以用惟一的参量来表示,根据运动轨迹的不同,选择不同的坐标参量,具体如下: a.沿圆周移动点光源
此类运动趋势的点光源设定为第一类点光源。
对于第一类光源,我们采用求取单一变量:水平面的变化量。
b.沿其他任意方向移动的点光源
此类运动趋势的点光源设定为第二类点光源。
对于第二类光源,我们采用先求取水平变化量,再求取垂直变化量。
根据以上分析,可以将追踪点光源的位置问题转化为求解水平变化量和垂直变化量的相关问题。
降低了任务的复杂性,目标明确。
2.传感器布局分析与计算
根据第一、二类点光源的特性及光照亮度来追踪光源的原理,依据简易、精确控制与节约资源的原则,本设计采用四路照度检测通道。
其中,两路检测元件水平排布用于水平面定位,布局相对对称,另两路左右检测元件与激光笔平行,用于竖直定位。
点光源的移动可分解为水平移动和竖直移动。
水平布局的中心传感器应用于精确定光源的水平位置。
水平方向两边的传感器主要用来检测光源的水平位置或水平移动方向,以便及时通知控制器调整指示笔的水平指向。
3.光照强度度分析
根据光敏三极管的物理结构特征:内置敏感元接收器,采用单位面积所接受的光通量来表示。
对相邻面元的光照分析与计算下:
A T89S52
光源检测电路
步进电机控制
步进电机驱动
水平方向的电机 垂直方向的电机
比例电流
源
光源
当βα≈。
就水平方向而言21r r =时,两个传感器的光照亮度21E E =,此时点光源位于两传感器中间位置;因为竖直方向与水平方向的分布相同,当
43E E =时,点光源位于竖直传感器中
间。
设置激光笔的位置在竖直传感器的中间,当水平与竖直方向同时满足条件时,激光笔将准确定位在光源中心处。
图2 光照度分析图 三.系统单元电路设计
检测电路:传感器检测光照后,输出的模拟量经比较放大处理后接入单片机。
图3 检测电路
点光源电流控制电路:选取比例电流源,输出电流经大功率三极管后,接入负载。
图4 点光源电流控制电路
电机驱动电路:采用电机驱动芯片ULN2003
和三极管驱动控制电机
图5 电机驱动电路
四.程序设计流程 程序描述:
初始化部分:控制器配置
程序主体部分包括:光照度检测,数据处理,状态分析、控制执行机构并循环。
控制系统上电后,如果不按按键K1,那么控制系统会进入到检测状态,在检测状态中,也可以通过按按键K4, K5,K6来实现向上、向下、向左、向 右四个方向的调节。
如果按按键K1,会启动系统自动寻找点光源。
此时,可以移动点光源的位置,或者移动激光笔的指示位置,经过一段
后,系统会自动调节使得激光笔的指示位置与点光源的位置接近,从而达到对点光源的自动跟踪效果。
图6 程序设计流程图
开始
系统初始化
等待开始按键按下
搜索光源
四路传感器采样
控制水平及垂直转向
五.测试方案与结果
1.测试方法与过程
测试前的准备:
先给点光源通电,调整点光源的电流值,达到规定范围内,然后在给其余设备供电后系统直接进入检测传感器是否能够正常工作状态。
然后按启动按键,就可以测试。
测试方法:
在测试前的准备工作结束后,先让其自动运行,在自动找到点光源,并且激光笔正确指示后,沿任意方向调整光源,观测结果。
2.测试仪器及材料
直流稳压电源万用表点光源支架
3.测试结果及拓展部分
点光源沿圆周运动,测量数据如下表:
表2:点光源沿圆周运动的测量数据
测量次数 1 2 3 4 5
测量偏差(cm) 1.3 2.5 1.9 2.4 1.0
测量次数 6 7 8 9 10
测量偏差(cm) 2.8 3.6 2.1 1.4 1.9
点光源沿直线LM运动,测量数据如下表:
表3:点光源沿直线LM运动的测量数据
测量次数 1 2 3 4 5
测量偏差(cm) 2.8 2.9 1.9 1.3 2.3
测量次数 6 7 8 9 10
测量偏差(cm) 1.8 2.0 2.5 3.0 2.3
点光源在激光笔支架前的一定空间范围内运动,测量数据如下表:
表4:点光源在一定空间范围内运动的测量数据
测量次数 1 2 3 4 5
测量偏差(cm) 0.7 1.3 2.1 1.7 0.5
测量次数 6 7 8 9 10
测量偏差(cm) 2.6 1.6 3.0 2.9 1.1
经过反复调试,在规定区域内,激光笔能够在5S内精确指示,误差在 5cm 之内。
此外,经测试,本系统的拓展部分:只要点光源能正对激光笔,任意方向的局部移动也可追踪;追踪的速度可调,分低速、高速追踪,效果良好。
六.设计总结
综合上述各部分的分析与测试结果,本设计基本完成了题目的基本要求,还较好的完成了大部分发挥内容。
通过本次的设计竞赛,我们懂得了理论联系实际的重要性,学到了很多东西,受益匪浅。
附录
1、参考文献
[1]童诗白华成英主编.模拟电子技术基础(第四版)北京:高等教育出版社,2006
[2]胡宴如主编.模拟电子技术(第三版)北京:高等教育出版社,2008
[3]李群芳张士军黄建编著.单片微型计算机与接口技术(第三版)北京:电
子工业出版社,2010。