行星传动比及啮合频率计算
行星齿轮传动比计算公式
行星齿轮传动比计算公式【最新版】目录1.行星齿轮传动比计算公式的概述2.行星齿轮传动比的计算方法3.行星齿轮传动比的特点4.应用行星齿轮传动比的注意事项正文行星齿轮传动比计算公式是一种在机械传动领域中常用的计算方式,它可以帮助我们准确地计算出行星齿轮传动系统中的传动比。
行星齿轮传动比计算公式的概述如下:行星齿轮传动比是指主动轮(太阳轮)的角速度与从动轮(行星轮)的角速度之比。
在行星齿轮传动系统中,太阳轮通过行星轮向外界输出动力,因此,行星齿轮传动比的计算至关重要。
它可以帮助我们了解传动系统的工作状态,以及调整传动系统中的参数,以达到最佳的工作效果。
行星齿轮传动比的计算方法如下:假设太阳轮的齿数为 Z1,行星轮的齿数为 Z2,太阳轮的角速度为ω1,行星轮的角速度为ω2。
那么,行星齿轮传动比计算公式可以表示为:传动比 = ω1 / ω2 = Z1 / Z2在实际应用中,行星齿轮传动比通常是瞬时传动比,即太阳轮和行星轮的瞬时角速度比。
但是,在某些特殊情况下,例如当太阳轮和行星轮的转速相同时,瞬时传动比就会变为恒定的平均传动比。
行星齿轮传动比具有以下特点:1.行星齿轮传动比是瞬时传动比,即随太阳轮和行星轮的角速度变化而变化。
2.行星齿轮传动比的计算方法简单,只需要知道太阳轮和行星轮的齿数和角速度即可。
3.行星齿轮传动比可以帮助我们了解传动系统的工作状态,以及调整传动系统中的参数,以达到最佳的工作效果。
应用行星齿轮传动比时,需要注意以下事项:1.确保行星齿轮传动比的计算准确无误,以免影响传动系统的工作效果。
2.根据行星齿轮传动比的计算结果,及时调整传动系统中的参数,以达到最佳的工作效果。
3.注意行星齿轮传动比的变化规律,以便在传动系统出现异常时,及时进行处理。
行星齿轮啮合频率的计算

外齿太阳轮:44*12=528Hz;
内齿太阳轮:77*0=0Hz;
行星轮:44/33*12*33=528Hz。
ቤተ መጻሕፍቲ ባይዱ
同学你好,这个我了解一些。
对于你的第一个问题:行星齿轮的啮合频率计算公式形式上与定轴齿轮有区别,对于通常的固定内齿圈的行星轮系,其啮合频率计算公式为fm=zr*(nr+n0)/60,其中zr为任一参考齿轮齿数,nr为参考齿轮转速,n0为行星架转速,其中转速以rpm计。虽然其形式上与传统定轴齿轮的不同,但推导过程所遵循的运动规律是完全一致的。
第二种是内齿圈输入,行星架固定,太阳轴输出
第三种是前一级的内齿圈旋转,并连接本级的行星架旋转,前一级的太阳轴连接本级的内齿圈,本级太阳轴输出。
第一种算啮合频率的思想就是假设行星架不动,内齿圈输入,这样就可以想象成内齿圈输入,太阳轴输出,输入的转速就等于行星架的转速,太阳轴输入转速相当于“太阳轴实际转速-行星架的转速”,因为两者运动同向;啮合频率就是内齿圈齿数×行星架转频=太阳轴的绝对转频(太阳轴实际转速-行星架的转频)×太阳轴齿数。
啮合齿轮的啮合频率是相同的也就是说太阳轮、行星轮和外太阳轮的啮合频率肯定是一样的。根据动力输入齿的啮合频率可以推出其余齿轮啮合频率。若果非得要算的话可以这样:外太阳轮齿数为Zw,太阳轮齿数为Zt,行星轮转速为Nx(r/s),行星轮啮合频率为Fx=Nx(Zw+Zt)。
下面是我对此问题的理解,不知对否,请各位大虾指点。
啮合对的啮合频率应该相同,但问题是行星减速器中,行星轮和内齿圈和太阳轴齿轮同时啮合,此时是两个啮合对,但是有行星轮参与,啮合频率的计算似乎复杂一些。
行星齿轮啮合频率计算

第一种算啮合频率的思想就是假设行星架不动,内齿圈输入,这样就可以想象成内齿圈输入,太阳轴输出,输入的转速就等于行星架的转速,太阳轴输入转速相当于“太阳轴实际转速-行星架的转速”,因为两者运动同向;啮合频率就是内齿圈齿数×行星架转频=太阳轴பைடு நூலகம்绝对转频(太阳轴实际转速-行星架的转频)×太阳轴齿数。
个人的理解是这样的,其实就是一个相对转速×齿数的问题;,关键是相对转速的理解和计算;
目前遇到的增速行星齿轮系有两种,
第一种是内齿圈固定,行星架输入,太阳轴输出
第二种是内齿圈输入,行星架固定,太阳轴输出
第三种是前一级的内齿圈旋转,并连接本级的行星架旋转,前一级的太阳轴连接本级的内齿圈,本级太阳轴输出。
第二种算啮合频率,其实行星架本身就是不动的,所以啮合频率就是:内齿圈齿数×行星架转频=太阳轴实际转频×太阳轴齿数,没有什么相对不相对的说法
第三种算啮合频率,也要假定行星架不动,假定行星架不动,内齿圈作为输入,则内齿圈的相对转速就是“内齿圈转速+行星架转速”,因为两个反方向传,假设一个不动,则动的那个转速就是两个相加的关系;太阳轴输出转速就是“太阳轴转速—行星架转速”;则啮合频率=(内齿圈转频+行星架转频)×内齿圈齿数=(太阳轴转频—行星架转频)×太阳轴齿数
自动变速器行星齿轮系统传动比计算
!"
汽车维修 #$$%&’
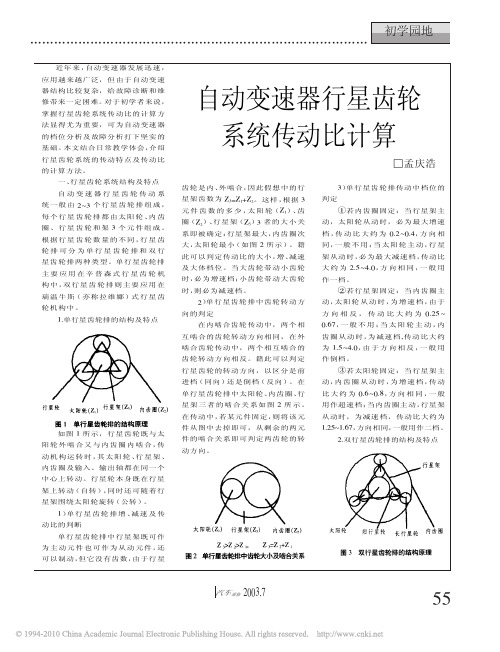
一 、行 星 齿 轮 系 统 结 构 及 特 点 自动变速器行星齿轮传动系 统一般由 !’# 个 行 星 齿 轮 排 组 成 , 每 个 行 星 齿 轮 排 都 由 太 阳 轮 、内 齿 圈、行星齿轮和架 # 个元件组成。 根 据 行 星 齿 轮 数 量 的 不 同 ,行 星 齿 轮排可分为单行星齿轮排和双行 星 齿 轮 排 两 种 类 型 。单 行 星 齿 轮 排 主要应用在辛普森式行星齿轮机 构 中 ,双 行 星 齿 轮 排 则 主 要 应 用 在 瑞 温 牛 斯( 亦 称 拉 维 娜 )式 行 星 齿 轮机构中。 ($单行星齿轮排的结构及特点
公式 +:传 动 比 /) 主 动 齿 轮 转速 0 从动齿轮转速)从动齿轮 齿数 0 主动齿轮齿数
#& 在 单 行 星 齿 轮 排 中 ,若 无 固 定 件 ,则 利 用 公 式 # 计 算 传 动 比。
公式 #:/)1+231#)4+2351% %& 在 双 行 星 齿 轮 排 中 ,若 有 一 个 元 件 固 定 ,同 样 用 公 式 + 计 算传动比。 ,& 在 双 行 星 齿 轮 排 中 ,若 无固定件,则用公式 % 计算传动 比。 公式 %:/)1+*31#)4+*351% 上述公式中,1+、1#、1% 分 别 为 太 阳 轮 、 内 齿 圈 、 行 星 架 转 速 ;3)(# 0 (+,(+、(# 分别为太阳轮 、 内 齿 圈 的 齿数。 四、瑞温牛斯式行星齿轮机构 传动比计算 以 67+’! 型 自 动 变 速 器 ( 图 !)为 例 ,介 绍 行 星 齿 轮 机 构 传 动 比 的计算方法。 其结构参数如下: 大 太 阳 轮 齿 数 8)%,;小 太 阳 轮 齿数 9)#";内齿圈齿数 :)’,。 则: 前 行 星 架 齿 数 ;)82:)%,2’,) +$<; 后 行 星 架 齿 数 =):*9)’,*#") ,<。 前 单 行 星 排 结 构 参 数 3+): 0 8) ’, 0 %,)#&+’"; 后双行星排结构参数 3#): 0 9) ’, 0 #")#&<,"。 +&;+ 档::#、> 起作用 后 行 星 排 为 双 行 星 轮 机 构 ,> 起作用,使后行星架逆时针方向单 向 制 动 , 动 力 经 :# 由 小 太 阳 轮 输 入,由内齿圈输出。应用公式 + 计算 传动比: ;+ 档传动比 /+): 0 9)#&<," #&;# 档::#、?; 0 9 起作用
行星齿轮传动比计算公式

行星齿轮传动比计算公式摘要:一、行星齿轮传动简介1.行星齿轮传动定义2.行星齿轮传动结构二、行星齿轮传动比计算公式1.行星齿轮传动比定义2.计算公式a.齿数比b.转速比c.传动比三、行星齿轮传动比计算实例1.实例一2.实例二四、行星齿轮传动比的实际应用1.工业机械2.汽车传动系统正文:行星齿轮传动是一种常见的机械传动方式,由太阳轮、行星轮、环形齿轮和行星架组成。
它具有体积小、重量轻、传动比稳定等优点,广泛应用于各种工业机械和汽车传动系统等领域。
在行星齿轮传动中,传动比是一个重要的参数,用于描述太阳轮、行星轮和环形齿轮之间的转速关系。
传动比的计算公式如下:a.齿数比:iz1/iz2,表示主动轮齿数与从动轮齿数之比。
b.转速比:n1/n2,表示主动轮转速与从动轮转速之比。
c.传动比:iz1/iz2 × n1/n2,表示主动轮齿数与从动轮齿数之比与主动轮转速与从动轮转速之比的乘积。
下面通过两个实例来说明行星齿轮传动比的计算方法:实例一:假设有一个行星齿轮传动系统,主动轮齿数为40,从动轮齿数为20,主动轮转速为1000r/min,从动轮转速为2000r/min。
求传动比。
解答:根据传动比公式,可得:齿数比:iz1/iz2 = 40/20 = 2转速比:n1/n2 = 1000/2000 = 0.5传动比:iz1/iz2 × n1/n2 = 2 × 0.5 = 1因此,该行星齿轮传动比的值为1。
实例二:假设有一个行星齿轮传动系统,主动轮齿数为30,从动轮齿数为15,主动轮转速为1500r/min,从动轮转速为3000r/min。
求传动比。
解答:根据传动比公式,可得:齿数比:iz1/iz2 = 30/15 = 2转速比:n1/n2 = 1500/3000 = 0.5传动比:iz1/iz2 × n1/n2 = 2 × 0.5 = 1因此,该行星齿轮传动比的值为1。
行星齿轮机构传动比计算

行星齿轮机构传动比计算图1 行星齿轮机构的结构简图行星齿轮传动具有质量小、体积小、传动比大以及传动平稳和传动效率高等优点,因而广泛应用于各种机械的传动系统中。
计算各种类型的行星齿轮传动机构的传动比主要有两种计算传动比的方法:一是“转化机构法”;二是“速度图解法”。
在此采用转化机构法针对图1形式的行星机构传动比进行计算。
转化机构法计算行星机构传动比的方法的基本思想是:根据相对原理,如果给整个行星齿轮传动加上一个与行星架H 的角速度H ω大小相等方向相反的公共角速度H ω-,行星齿轮传动中各个构件之间的相对运动关系仍然不变。
但是,原来以角速度H ω运动的行星架H 就变成静止不动的构件,即其相对角速度0HHH H ωωω=-=。
于是,该行星齿轮传动就转化为定轴齿轮传动。
这样便可以用定轴齿轮传动的传动比公式计算其传动比。
总传动比 1a bi ωω=,其中1a ω、b ω为主动件和被动件的角速度 根据该计算方法的基本思想,结合图1的具体结构,得到第一级传动比为:1111111a H b b H a zi z ωωωω-==-- (1)同理第二级和第三级传动比分别为:2222222a H b b H a zi z ωωωω-==-- (2)3333333a Hb b H a zi z ωωωω-==-- (3)根据图1中的实际结构,及三个内齿圈连接为一体,且第三级行星架H3固定,所以有123b b b b ωωωω===,30H ω= , 12H a ωω= ,23H a ωω= (4) 由(3)式可得3333233b b a b b H a a z zz z ωωωω=-⨯=-⨯= (5) 把(5)式代入(2)式可得32223232223b a b a H a b b b H a b ba z z zz z z ωωωωωωωω+⨯-==--+⨯所以得23323321233233()[(1)]b b b b b b a b b b b H a a a a a a z z z z z zz z z z z z ωωωωωω=-⨯+⨯-⨯=-⨯⨯++= (6) 把(6)式代入(1)式可得:2331112331233111233[(1)][(1)]b b b a b a H a a a b b b b b H a b b a a a z z z z z z zz z z z z z z ωωωωωωωω+⨯⨯++-==--+⨯⨯++ (7)式(7)可化简为:123323323323312332331233233[(1)][(1)]1[(1)]1[(1)]a b b b b b b b a a a a a a b b b b b b b a a a a a a a z z z z z zi z z z z z z zz z zz z zz z z z z z z ωω+⨯+++⨯++==-+⨯+++⨯++ (8)由(8)式可得123323312332331[(1)][(1)]b b b b b b b a a a a a a a z z z z z z z i z z z z z z z ⎧⎫=-⨯+⨯++-⨯++⎨⎬⎩⎭11233233112332331233112331[(1)][(1)][(1)](1)b b b b b b b b a a a a a a a a b b b b b a a a a a z z z z z z z z z z z z z z z z z z z z z z z z z z =--⨯⨯++-⨯++=--⨯++⨯+所以12331123311(1)[(1)](1)b b b b b a a a a a z z z z z i z z z z z -=-+-⨯++⨯+ 12331233(1)[1(1)]b b b b a a a a z z z zz z z z =-+⨯+⨯++ 123123(1)(1)(1)b b b a a a z z z z z z =-+⨯+⨯+ 所以得总传动比1231231(1)(1)(1)b b b a a a z z zi z z z =-+⨯+⨯+ 即为该种行星结构的传动比。
行星轮系传动比的计算
n4 4 (90)
1(25)
【解】
z 2 z 3 z4 n1 nH i n4 nH z1 z 2' z 3'
H 14
3(30)
30 30 90 6.48 25 25 20 1 1 n n H H 6.48 6 . 48 2 nH 2 n
H H
3.转化轮系传动比计算
2 H 1
z2 z3 z3 1 H i 3 H z 2 z1 z1
H 13 H 1 H 3
z 2 z4 z n 1 H i n H z1 z3 zn1
H 1n
3
4.真实轮系传动比计算 1)差动轮系(F=2)
H
2 (30)
3'(20)
nH 1 .1 866 .599 (r(/ rmin) / min)
n1
2' (25) H
n4 4 (9பைடு நூலகம்)
1(25)
【例】:已知 z1=z2=z3, 求 i1H 。
【解】 2
n1 nH n1 nH i nH n3 nH
H 13
n
=-1
H n 1 1
4' 4
Ⅰ
3
5
Ⅳ
结论1 结论2
各级从动轮齿数连乘积 总传动比= 各级主动轮齿数连乘积 总传动比=各级传动比连乘积。
(2)主、从动轮转向关系的确定 任何定轴轮系都可用箭头表示 2
1 1 2 右手法则 左手法则
2
1
蜗轮蜗杆判断方法:左旋蜗杆
右旋蜗杆
右手法则:右手握向与蜗杆转向一致,拇指方向 为蜗轮啮合点的线速度方向。
行星齿轮传动比的计算公式
行星齿轮传动比计算在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比eab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式1=+c ba a bc i i ――――――――――――――――――――――――1 acx a bx abci i i = ―――――――――――――――――――――――――2 a cb abc i i 1= ――――――――――――――――――――――――――3熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。
关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等例如:在此例中,要求出e ab i =,如果行星架固定不动的话,这道题目就简单多了,就是一定轴传动。
所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bci i i =将x 加进去, 所以可以得出:e bx e ax eab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第一个公式1=+c ba abc i i 了,所以)1()1(xbe x ae ebx e ax eab i i i i i --==所以现在eab i 就变成了两个定轴传动之间的关系式了。
定轴传动的传动比就好办了,直接写出来就可以了。
即)1()1())1(1())1(1()1()1(01c e bd ae c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ⨯-+=⨯--⨯--=--== 再例如下面的传动机构:已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。
行星轮系传动比的计算
12.2 行星轮系传动比的计算12.2.1 行星轮系的分类若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。
如图所示的轮系中,齿轮2除绕自身轴线回转外,还随同构件H一起绕齿轮1的固定几何轴线回转,该轮系即为行星轮系。
齿轮2称为行星轮,H称为行星架或系杆,齿轮1、3称为太阳轮。
运动演示拆装通常将具有一个自由度的行星轮系称为简单行星轮系,如下图所示;将具有两个自由度的行星轮系称为差动轮系,如下图所示。
12.2.2 行星轮系的传动比计算不能直接用定轴轮系传动比的公式计算行星轮系地传动比。
可应用转化轮系法,即根据相对运动原理,假想对整个行星轮系加上一个与n H大小相等而方向相反的公共转速-n H,则行星架被固定,而原构件之间的相对运动关系保持不变。
这样,原来的行星轮系就变成了假想的定轴轮系。
这个经过一定条件转化得到的假想定轴轮系,称为原行星轮系的转化机构。
转化轮系运动演示利用定轴轮系传动比的计算方法,可列出转化轮系中任意两个齿轮的传动比。
1,3轮的传动比为:一般地,n G和n K为行星轮系中任意两个齿轮G和K的转速,在使用上式时应特别注意:(1)公式只适用于圆柱齿轮组成的行星轮系。
对于由圆锥齿轮组成的行星轮系,当两太阳轮和行星架的轴线互相平行时,仍可用转化轮系法来建立转速关系式,但正、负号应按画箭头的方法来确定。
并且,不能应用转化机构法列出包括行星轮在内的转速关系。
(2)将已知转速代入公式时,注意“+”、“-”号。
一方向代正,另一方向代负号。
求得的转速为正,说明与正方向一致,反而反之。
运动演示拆装例12-2 行星轮系如图所示。
已知Z1=15,Z2=25,Z3=20,Z4=60,n1=200r/min,n4=50r/min,且两太阳轮1、4转向相反。
试求行星架转速n H及行星轮转速n3。
第二节 行星轮系传动比的计算
第⼆节 ⾏星轮系传动⽐的计算第13章齿轮系传动 >>第⼆节 ⾏星轮系传动⽐的计算13.2.1 ⾏星轮系概述⾏星轮系是⼀种先进的齿轮传动机构。
由于⾏星传动机构中具有动轴线⾏星轮,采⽤合理的均载装置,由数个⾏星轮共同承担载荷,实⾏功率分流,并且合理地应⽤内啮合传动,以及输⼊轴与输出轴共轴线等,从⽽具有结构紧凑、体积⼩、质量⼩、承载能⼒⼤、传递功率范围及传动⽐范围⼤、运⾏噪声⼩、效率⾼及寿命长等优点。
所以⾏星传动在国防、冶⾦、起重运输、矿⼭、化⼯、轻纺、建筑⼯业等部门的机械设备中,得到了愈来愈⼴泛的应⽤。
我国现已制订了部分⾏星减速器的标准系列。
换向机构汽车后桥⽣产线13.2.2 ⾏星轮系的组成⾏星轮系有三种基本构件:⾏星轮、⾏星架和中⼼轮。
齿轮2活套在构件上,分别与外齿轮1和内齿轮3相啮合。
构件、齿轮1和3三者的轴线必须重合,否则整个轮系不能转动。
传动时,齿轮2⼀⽅⾯绕⾃⾝的⼏何轴线转动(⾃转),同时⼜随构件绕固定的⼏何轴线回转(公转),如同天空中的⾏星运动⼀样。
13.2.3 ⾏星轮系的分类根据⾏星轮系基本构件的组成情况,可分为三种类型。
1、2K-H型由两个中⼼轮(2K)和⼀个⾏星架(H)组成的⾏星齿轮传动机构,2K-H型传动⽅案很多。
由于2K-H型具有构件数量少,传动功率和传动⽐变化范围⼤,设计较容易等优点,因此应⽤最⼴泛。
NGW型NW型NN型WW型2、3K型有三个中⼼轮(3K),其⾏星架不传递转矩,只起⽀承⾏星轮的作⽤。
3、 K-H-V型由⼀个中⼼轮(K)、⼀个⾏星架(H)和⼀个输出机构组成,输出轴⽤V表⽰3K型K-H-V型⾏星轮系按啮合⽅式来命名有NGW型、NW型和NN型等等。
N表⽰内啮合,W表⽰外啮合,G表⽰公⽤的⾏星轮。
13.2.3 ⾏星轮系传动⽐的计算⾏星轮系与定轴轮系的根本差别在于⾏星轮系中具有转动的⾏星架,从⽽使得⾏星轮既有⾃转⼜有公转。
因此,⾏星轮系各构件间的传动⽐不能直接引⽤定轴轮系传动⽐的公式来计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
行星传动传动比及啮合频率计算
特征频率主要包含转频和啮合频率,根据传动比计算的结果,可以相应的算出每个齿轮相对应的转速n ,则转频60i i f n =,齿轮啮合频率等于该齿轮的转频乘以它的齿数。
相互啮合的两个齿轮的啮合频率是相等的。
即zi i i f f z =⨯。
而齿轮的振动谱就是以该基频(zi f )波和高次谐波所组成的谱,因此在故障诊断中具有重大意义。
又因为相互啮合的两个齿轮的啮合频率是相等的,所以一组行星轮系当中只要计算中心论转速即可。
1
a 1
b 1
c 2
a 2
b 2
c Input Shaft
Output Shaft
2
d 1
d 3
d 4
d
齿轮模型
齿轮箱各级齿轮参数
参数
行星齿轮箱 平行轴齿轮箱 一级 二级 高速级 低速级
a 1
b 1
c 1 a 2 b 2 c 2
d 1 d 2 d 3 d 4 模数 1 1 1 1 1 1 1.5 1.5 1.5 1.5 齿数 20 40 100 28 36 100 29 100 90 36 个数
1
3
1
1
4
1
1
1
1
1
n –输入转速;
Za1–第一级太阳轮齿数;Zb1 –第一级行星轮齿数;Zc1–第一级内齿圈齿数; Za2 –第二级太阳轮齿数;Zb2 –第二级行星轮齿数;Zc2 –第二级内齿圈齿数;
(1) 一级行星轮系:
111111a H c c H a n n z n n z -=-- 其中,n n n a c ==11,0 ,则 )1//(11111+==a c a H b z z n n n =n 6
1
(2) 二级行星轮系:
222
222
a H c c H a n n z
n n z -=--其中,
1
22,0H a c n n n ==,则
)1//(22222+==a c a H b z z n n n =232
7
a n 行星轮系级: 传动比i =192/7 (3)平行轴:
中间低速级: 传动比i1= 小
大
n n =100/29
高速级: 传动比i2= 小
大
n n =2.5 平行轴传动比:i=8.6 总传动比:i=232
齿轮箱振动特征频率 1. 啮合频率:
1)转速同步频率 n f = n/60 式中,n 为轴转速(转/分)。
2)定轴齿轮啮合频率
n f = nz/60 式中,n 为轴转速(转/分), r z 为齿轮齿数。
3)行星轮系,啮合频率用下式计算: m f = a b a c b z f f z f ⨯-=⨯)( 式中,b n 为行星轮架转速(转/分),c z 为内
齿圈齿数,a f 为太阳轮转频,a z 为太阳轮齿数。
m f =(15.95-1.975)*13=181.675
m f =1.975*92=181.7
2. 故障特征频率: 1) 行星轮: 局部故障特征频率: 太阳轮: 行星论: 分布式故障特征频率: 太阳轮: 行星论: 2) 平行轴:
假定输入转速1500,由上述公式可得各级齿轮的故障特征频率如下:
第一级行星齿轮:
1) rpm n n a 15001==
rpm n n n a b a 2506/112=== Hz n f a a 2560/11== Hz n f b b 17.460/11==
Hz f z f b c m a 41717.4100111=⨯=⨯=
2) rpm n n b a 25012==
==
=21232
7
a d
b n n n 54.7rpm Hz n f a a 17.460/22==
91.060/22==b b n f
Hz f z f b c m a 91222=⨯=
3)12
1
32d d d d d n z z n n ⨯=
==15.86rpm 60/332d d d n f f ===0.26Hz 222d d m d z f f ⨯==26Hz Hz z f f d d m d 36.9444=⨯=。