(完整版)自动控制原理胡寿松第二版课后答案第五章_参考答案
自动控制原理课后习题答案
• 20世纪40年代,Evans提出并完善了根轨迹法。
• 20世纪50年代末,最优控制系统设计。
• 20世纪50年代末,基于时域分析的现代控制理 论。
• 60年代~80年代:最优控制、随机系统的最优控 制、复杂系统的自适应控制和学习控制得到了研 究。
5. 干扰量(Disturbance):引起被控量偏离预定运 行规律的量。除给定值之外,凡能引起被控量变 化的因素,都是干扰。干扰又称扰动
6.反馈(Feedback):将系统输出量引回输入端,并 与参考输入进行比较的过程。
7.前向通路 (Forward Channel):从给定量到被控 量的通道。
缺点: 闭环控制系统的参数如果匹配得不好,会造成被控量的 较大摆动,甚至系统无法正常工作。
例: 飞机自动驾驶控制
被控对象: 飞机
被控量: 飞机的俯仰角 θ
控制任务:系统在任何扰动作用下,保持飞机俯仰角不变。
仰俯角控制系统方块图
IV 复合控制
开环控制和闭环控制相结合的一种控制。实质上,它是在 闭环控制回路的基础上,附加了一个输入信号或扰动作用 的顺馈通路,来提高系统的控制精度。
an
d
n n
c(t
)
dt n
+
an-1
d n-1n-1c(t ) dt n-1
+"+
a1
dc(t) dt
+
a0c(t )
=
bm
d m m r (t ) dt m
+ bm-1
d m-1m-1r (t ) dt m-1
+" + b1
胡寿松自动控制原理课后习题答案
1 请解释下列名字术语:自动控制系统、受控对象、扰动、给定值、参考输入、反馈。
解:自动控制系统:能够实现自动控制任务得系统,由控制装置与被控对象组成; 受控对象:要求实现自动控制得机器、设备或生产过程扰动:扰动就是一种对系统得输出产生不利影响得信号、如果扰动产生在系统内部称为内扰;扰动产生在系统外部,则称为外扰。
外扰就是系统得输入量。
给定值:受控对象得物理量在控制系统中应保持得期望值参考输入即为给定值、反馈:将系统得输出量馈送到参考输入端,并与参考输入进行比较得过程。
2请说明自动控制系统得基本组成部分。
解:作为一个完整得控制系统,应该由如下几个部分组成:①被控对象: 所谓被控对象就就是整个控制系统得控制对象;②执行部件: 根据所接收到得相关信号,使得被控对象产生相应得动作;常用得执行元件有阀、电动机、液压马达等。
③给定元件: 给定元件得职能就就是给出与期望得被控量相对应得系统输入量(即参考量);④比较元件: 把测量元件检测到得被控量得实际值与给定元件给出得参考值进行比较,求出它们之间得偏差、常用得比较元件有差动放大器、机械差动装置与电桥等。
⑤测量反馈元件:该元部件得职能就就是测量被控制得物理量,如果这个物理量就是非电量,一般需要将其转换成为电量。
常用得测量元部件有测速发电机、热电偶、各种传感器等;⑥放大元件: 将比较元件给出得偏差进行放大,用来推动执行元件去控制被控对象。
如电压偏差信号,可用电子管、晶体管、集成电路、晶闸管等组成得电压放大器与功率放大级加以放大。
⑦校正元件: 亦称补偿元件,它就是结构或参数便于调整得元件,用串联或反馈得方式连接在系统中,用以改善系统得性能、常用得校正元件有电阻、电容组成得无源或有源网络,它们与原系统串联或与原系统构成一个内反馈系统。
3请说出什么就是反馈控制系统,开环控制系统与闭环控制系统各有什么优缺点?解:反馈控制系统即闭环控制系统,在一个控制系统,将系统得输出量通过某测量机构对其进行实时测量,并将该测量值与输入量进行比较,形成一个反馈通道,从而形成一个封闭得控制系统;开环系统优点:结构简单,缺点:控制得精度较差;闭环控制系统优点:控制精度高,缺点:结构复杂、设计分析麻烦,制造成本高、4 请说明自动控制系统得基本性能要求。
胡寿松自动控制原理课后习题问题详解
1 请解释下列名字术语:自动控制系统、受控对象、扰动、给定值、参考输入、反馈。
解:自动控制系统:能够实现自动控制任务的系统,由控制装置与被控对象组成;受控对象:要求实现自动控制的机器、设备或生产过程扰动:扰动是一种对系统的输出产生不利影响的信号。
如果扰动产生在系统内部称为内扰;扰动产生在系统外部,则称为外扰。
外扰是系统的输入量。
给定值:受控对象的物理量在控制系统中应保持的期望值参考输入即为给定值。
反馈:将系统的输出量馈送到参考输入端,并与参考输入进行比较的过程。
2 请说明自动控制系统的基本组成部分。
解:作为一个完整的控制系统,应该由如下几个部分组成:①被控对象:所谓被控对象就是整个控制系统的控制对象;②执行部件:根据所接收到的相关信号,使得被控对象产生相应的动作;常用的执行元件有阀、电动机、液压马达等。
③给定元件:给定元件的职能就是给出与期望的被控量相对应的系统输入量(即参考量);④比较元件:把测量元件检测到的被控量的实际值与给定元件给出的参考值进行比较,求出它们之间的偏差。
常用的比较元件有差动放大器、机械差动装置和电桥等。
⑤测量反馈元件:该元部件的职能就是测量被控制的物理量,如果这个物理量是非电量,一般需要将其转换成为电量。
常用的测量元部件有测速发电机、热电偶、各种传感器等;⑥放大元件:将比较元件给出的偏差进行放大,用来推动执行元件去控制被控对象。
如电压偏差信号,可用电子管、晶体管、集成电路、晶闸管等组成的电压放大器和功率放大级加以放大。
⑦校正元件:亦称补偿元件,它是结构或参数便于调整的元件,用串联或反馈的方式连接在系统中,用以改善系统的性能。
常用的校正元件有电阻、电容组成的无源或有源网络,它们与原系统串联或与原系统构成一个内反馈系统。
3 请说出什么是反馈控制系统,开环控制系统和闭环控制系统各有什么优缺点?解:反馈控制系统即闭环控制系统,在一个控制系统,将系统的输出量通过某测量机构对其进行实时测量,并将该测量值与输入量进行比较,形成一个反馈通道,从而形成一个封闭的控制系统;开环系统优点:结构简单,缺点:控制的精度较差;闭环控制系统优点:控制精度高,缺点:结构复杂、设计分析麻烦,制造成本高。
《自动控制原理》胡寿松习题答案附带例题课件
采用 MATLAB 软件上机进行实验,就是利用现代计算机硬件和计算机软件技术,以数字仿真技术为核 心,实现对自动控制系统基本理论和分析方法的验证以及控制系统设计。
通过上机实验,使学生在 MATLAB 软件的基本使用、编程调试、仿真实验数据的获取、整理、分析以 及实验报告的撰写等基本技能得到训练。
二、教学基本要求
本课程采用时域法、根轨迹法和频率特性法对自动控制系统的性能进行分析和设计,学完本课程应达
到以下基本要求。
1.掌握负反馈控制原理 掌握负反馈控制原理,能够分析负反馈控制系统的调节过程并画出相应的控制系统方框图。了解控制
系统的基本构成和分类。
2.熟悉建立控制系统数学模型的方法 熟悉用拉氏变换法求解线性系统微分方程的基本方法。掌握控制系统传递函数、动态结构图建立和简
2.绘制1800 根轨迹的基本法则 3.绘制 00 根轨迹的基本法则
4.广义根轨迹 5.非最小相位系统的根轨迹 6.用根轨迹法分析系统性能 (五)频率法 了解频率特性的基本概念,频率特性的几何表示方法,熟悉典型环节的对数频率特性曲线(Bode 图) 绘制和极坐标曲线(Nyquist 曲线),掌握系统开环对数频率特性曲线的绘制,了解系统开环极坐标曲线绘 制的一般方法,熟悉开环对数频率特性低频段、中频段、高频段的特征,学会运用奈奎斯特稳定判据判断 闭环系统的稳定性,掌握系统稳定裕度的基本概念和计算方法,了解系统性能和开环频率特性的关系。 1.频率特性的基本概念和几何表示 2.典型环节的频率特性 3.控制系统开环对数频率特性和极坐标曲线的绘制 4.最小相位系统传递函数的确定 5.奈奎斯特稳定判据和 Bode 图上的稳定判据 6.稳定裕度的基本概念和计算方法 7.频率特性与系统性能的基本关系 (六)控制系统性能的校正 了解校正装置和校正方法,熟悉串联超前校正、串联滞后校正的基本原理和方法。了解频率法反馈校 正的基本原理和方法(选讲)。 1.控制系统校正的基本概念和一般方法 2.频率法串联超前校正的基本原理和方法 3.频率法串联滞后校正的基本概念和方法
《自动控制原理》+胡寿松+习题答案(附带例题课件)
用电技术专业方向)
先修课程: 高等数学、大学物理、积分变换、电路、数字电子技术、模拟电子技术
一、课程性质、目的和任务
本课程为电气工程及其自动化专业的主要专业基础课程之一,目的是使学生掌握负反馈控制原理、控
制系统数学模型的建立和系统性能分析、设计的基本方法,培养学生分析和设计自动控制系统性能的基本
能力并能满足其它后续专业课程对自动控制理论知识的需要。
制系统的性能。了解开环零、极点对系统性能的影响。
5.熟悉频率分析法分析控制系统性能的方法 熟悉典型环节频率特性的求取以及频率特性曲线,掌握系统开环对数频率特性曲线、极坐标曲线绘制
的基本方法。了解根据开环对数频率特性曲线分析闭环系统性能的方法。熟悉用奈奎斯特稳定判据判断系
1
《自动控制原理》电子教案
统稳定性的方法。掌握稳定裕度的计算方法。 6.熟悉控制系统校正的方法 了解串联超前校正、串联滞后校正的校正装置设计的基本原理和方法。 7.熟悉非线性控制系统的分析方法 了解非线性控制系统的特点和常见非线性特性。熟悉非线性控制系统的描述函数法。
熟悉系统微分方程的建立,拉氏变换及其应用。掌握系统传递函数的定义及求取,系统动态结构图 的建立及其简化以及系统不同传递函数的定义及求取。
1.控制系统微分方程的建立 2.非线性数学模型的线性化 3.控制系统的传递函数 4.典型环节的传递函数 5.控制的动态结构图及变换 6.信号流图及梅逊公式 7.反馈控制系统的传递函数 (三)自动控制系统的时域分析法 熟悉控制系统的时域指标,一阶系统的单位阶跃响应、斜坡响应以及性能指标的求取。掌握典型二阶 系统的单位阶跃响应以及性能指标的求取。掌握劳斯稳定判据分析系统的稳定性方法。熟悉控制系统稳态 误差分析以及稳态误差、误差系数的求取。 1. 控制系统性能指标的定义 2.一阶系统性能分析 3.二阶系统性能分析 4. 欠阻尼二阶系统的时域分析和指标计算 5. 高阶系统的时域分析、闭环主导极点和高阶系统的降阶
自动控制原理简明教程第二版课后答案第五章习题答案
5-13 试用奈氏判据分宾判断题 5-5,5-6 系统的闭环稳定性。 解:5-5 (1)τ > T 时系统闭环稳定。 (2)T >τ 5-6 (1)ν =1 时系统闭环稳定。 (2)ν = 2,3,4 时系统闭环不稳定。 5-14 已知下列系统开环传递函数(参数 K,T,Ti > 0;i = 1,2,,6 ) : 时系统闭环不稳定。
8
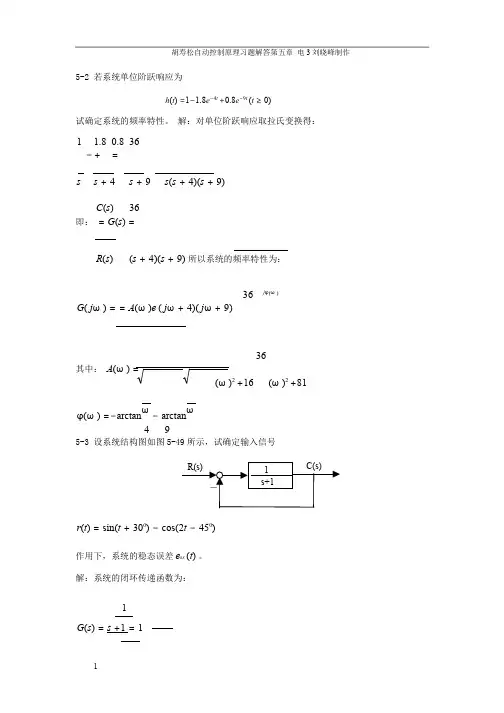
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
L(ω ) (dB)
60 40 20
-20 -40 -20
0
0.1 1 2 10
-40 20 -60
100ω
ω 0 − 90
−180
5-11 绘制下列函数的对数幅频渐进特性曲线:
2
(1)G(s) =
(2s +1)(8s +1) 200 (2)G(s) = s 2(s +1)(10s +1)
1
所以:G(s) = 100(0.001s/ω
1
+1)
(s
/ω 1 +1)(s /100 +1)
11
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
(b)G(s) = s 102 (s(s/ω /ω
21
++11) )
(c)
G(s) = (s
2
2ξ ω nKs+2ω + s
n 2
ω
n
2
)(s /10 +1)
0.5 −87.2
1 −92.1
3 −164
5 − 216
7 − 234.5
10 − 246
自动控制原理简明教程第二版课后答案第五章习题答案
5-9 已知系统开环传递函数
10 G(s)H(s) = s(s +1)(s 2 /4 +1)
试绘制系统概略开环幅相曲线。 解:
5-10 已知系统开环传递函数
7
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
G(s)H(s) =
2
s
1( s
s + 921) + 3s + s 1
要求选择频率点,列表计算 A(ω ) ,L(ω )和 ϕ(ω ) ,并据此在对数坐标纸上绘制系统开环 对数频率特性曲线。
5-5 已知系统开环传递函数
G(s)H(s) = s K2 ((
τ
Ts
s+ 1 ) + 1 ) ;
K,τ ,T > 0
试分析并绘制 τ > T 和 T >τ 解:相频特性为
情况下的概略开环幅相曲线。
ϕ(ω ) =−1800 + τ ω − arctanTω
(1) τ > T 时,ϕ(ω ) >−1800 概略开环幅相曲线如下
(1) τ < T 时,ϕ(ω ) <−1800 概略开环幅相曲线如下
5-6 已知系统开环传递函数
1 G(s)H(s) = ν s (s +1)(s + 2)
4
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
试分别绘制 ν =1,2,3,4 时系统的概略开环幅相曲线。 解: (1)ν = 1 时系统的概略开环幅相曲线如下:
8
胡寿松自动控制原理习题解答第五章 电 3 刘晓峰制作
L(ω ) (dB)
60 40 20
-20 -40 -20
0
自动控制原理(胡寿松)课后习题答案详解
N
G3
G2
1+G1G2H1
-
- C
再进一步化简得:
1+G1G2H1
G1
G2
20
胡寿松自动控制原理习题解答第二章
N
-
G3
G2
C
1+G1G2H1
-
1+G1G2H1
G1
G2
再进一步化简得:
N G2G3-1-G1G2H1 1+G1G2H1
G2
C
G2+G1 (1+G1G2H1)
所以: C(s) =
G2 (G2G3 − 1 − G1G2 H1 )
10 6s + 10
R(s) 1 + G(s)H (s) 1 + 20 10
6s + 10 20s + 5
E(s) =
10
=
10
R(s) 1 + G(s)H (s) 1 + 20 10
6s + 10 20s + 5
=
(6s
200(20s + 5) + 10)(20s + 5) +
200
=
200(20s + 5) 120s 2 + 230s + 250
Z2
=
R2
+
1 C2s
=
1 C2s
(R2C2s + 1) =
1 C2
s
(T2
s
+ 1)
所以: U 0 (s) = Z 2 =
1 C2
s
(T2
s
+
1)
自动控制原理胡寿松主编课后习题答案详解
6
胡寿松自动控制原理习题解答第二章
在该点附近用泰勒级数展开近似为:
y
=
f
(
x0
)
+
df (x) dx
x0
(
x
−
x0
)
即 ed − Ed0 cosα 0 = K s (α − α 0 )
其中 K s
=
ded dα
α =α
= −Ed 0 sinα 0
2-9 若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应 c(t) = 1 − e−2t + e−t ,试求系统的传递函数和脉冲
K 2 x0 = f (x& − x&0 )
消去中间变量 x,可得系统微分方程
f (K1
+
K
2
)
dx0 dt
+
K1K2 x0
=
K1 f
dxi dt
对上式取拉氏变换,并计及初始条件为零,得系统传递函数为
ቤተ መጻሕፍቲ ባይዱ
X 0 (s) =
fK1s
X i (s) f (K1 + K2 )s + K1K2
③图 2—57(c):以 x0 的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:
K 2 (xi − x0 ) + f 2 (x&i − x&0 ) = f1 (x&0 − x&) (1)
K1x = f1 (x&0 − x&) (2)
所以 K 2 (xi − x0 ) + f 2 (x&i − x&0 ) = K1x (3)
对(3)式两边取微分得
《自动控制原理》 胡寿松 习题答案(附带例题课件)
自动控制原理
电子教案
《自动控制原理》电子教案
《自动控制原理》课程教学大纲
课程编号: 课程名称:自动控制原理 英文名称:Automatic Control Theory 课程类型::专业基础必修课 总 学 时:64 学 学 时:64 分:4 讲课学时:56 上机学时:8
适用对象:电气工程及其自动化专业(电力系统及自动化、电力系统继电保护、电网监控技术、供 用电技术专业方向) 先修课程: 高等数学、大学物理、积分变换、电路、数字电子技术、模拟电子技术
大纲制订人:杨志超 大纲审定人:李先允 制订日期:2005 年 6 月
7
《自动控制原理》电子教案
自动控制原理授课计划(64 学时)
2.利用 MATLAB 程序绘制控制系统阶跃响应曲线、计算性能指标,讨论开环放大倍数对闭环系统响 应速度、稳定性和稳态误差的影响 。 (验证性实验) 2 学时
3. 利用 MATLAB 程序绘制控制系统的 Nyquist 曲线、 Bode 图, 计算控制系统的幅值裕度和相位裕度。 (验证性实验) 4.利用 MATLAB 软件设计控制系统(设计性实验) 2 学时 2 学时
六、实验报告要求
每次上机实验必须提交实验报告。实验报告由实验原理、实验内容、仿真程序、实验数据记录及分析 处理等内容组成。
七、考核方式与成绩评定标准
实验成绩:预习 10%、上机操作 50%、报告 40%
八、教材及主要参考资料
教 材: 《自动控制理论实验指导书》 ,王芳、杨志超编写,2007 年 参考书:《自动控制原理》,国防工业出版社,王划一主编,2001 年 《基于 MATLAB 的系统分析与设计》-控制系统,楼顺天、于卫编著,西安电子科技大学出 版社,1999 年 《MATLAB 控制系统设计与仿真》,赵文峰编著,西安电子科技大学出版社,2002 年