7-1并口的使用与步进电机控制09918
常用电机与控制—步进电机

常用电机与控制—步进电机步进电动机一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。
每输入一个冲信号,该电动机就转过一定的角度(有的步进电动机可以直接输出线位移,称为直线电动机)。
因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。
步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。
由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。
随着数字控制系统的发展,步进电动机的应用将逐渐扩大。
步进电动机的种类很多,按结构可分为反应式和激励式两种;按相数分则可分为单相、两相和多相三种。
图1 反应式步进电动机的结构示意图图1是反应式步进电动机结构示意图,它的定子具有均匀分布的六个磁极,磁极上绕有绕组。
两个相对的磁极组成一组,联法如图所示。
下面介绍反应式步进电动机单三拍、六拍及双三拍通电方式的基本原理。
一、单三拍通电方式的基本原理设A相首先通电(B、C两相不通电),产生A-A′轴线方向的磁通,并通过转子形成闭合回路。
这时A、A′极就成为电磁铁的N、S 极。
在磁场的作用下,转子总是力图转到磁阻最小的位置,也就是要转到转子的齿对齐A、A′极的位置(图2a);接着B相通电(A、C 两相不通电),转了便顺时针方向转过30°,它的齿和C、C′极对齐(图2c)。
不难理解,当脉冲信号一个一个发来时,如果按A→C→B→A→…的顺序通电,则电机转子便逆时针方向转动。
这种通电方式称为单三拍方式。
图2 单三拍通电方式时转子的位置二、六拍通电方式的基本原理设A相首先通电,转子齿与定子A、A′对齐(图3a)。
然后在A相继续通电的情况下接通B相。
这时定子B、B′极对转子齿2、4产生磁拉力,使转子顺时针方向转动,但是A、A′极继续拉住齿1、3,因此,转子转到两个磁拉力平衡为止。
这时转子的位置如图3b所示,即转子从图(a)位置顺时针转过了15°。
7-1并口的使用与步进电机控制09918

电机与驱动器的连接
Ø CP+ Ø CP步进脉冲+ 步进脉冲-
Ø DIR+
Ø DIRØA ØA ØB
方向脉冲+
方向脉冲红 绿 蓝 转子
ØB
Ø+ Ø-
黄
DC24V/2A
细分开关设置
1 2 0 0 0 1 1 0 3 1 1 1 4 1 1 1 num 2 4 8 angle 0.9º 0.45º 0.225º
并口的使用与步进电机控制
数据所有位同时进行传输称为并行通讯,通常是8位、16 位、32位 同时传送。 常见的并行I/O接口芯片如 Intel8255A可编程并行接口芯 片。8255A有3个8位输入、输出端口:A口、B口和C口。
早期PC机有一片8255A , 现在集成在多功能芯片中, 功能和地址基本兼容。
总线的概念
总线是连接多个数字系统或部件的公共信息通道,它由 若干公共信号线组成。 总线是传送信息代码的公共途径,由其构成系统与系统 之间,板与板之间,芯片与芯片之间标准的信息通道。 片内总线是微处理器芯片或其它接口器件集成电路内 的信息通道。 片间总线也称元件级总线或片总线,是由集成电路内部引 出的总线。通常是在一块印刷电路板内,实现电路板内各元 件相互连接的信号线。元件级总线通常包括地址线、数据线 和控制线。
switch 3,4 kept 1
共阳极接法
CP+ 和 DIR+ 接在一起作为共阳端OPTO,接外部系统+5V。 脉冲信号接 CP-端,方向信号接 DIR-端。 CP=5V 高电平 脉冲宽度2μS 负脉冲方式 CP=0V 低电平
步进电机与接口技术试验说明书

华北科技计算机系综合性实验实验报告课程名称微机原理及应用实验学期 2008 至 2009 学年第 2 学期学生所在系部机电工程系年级 06级专业班级机制2班学生姓名 KUNC 学号 200602024211 任课教师 KUNC 实验成绩计算机系制《微机原理及应用》课程综合性实验报告开课实验室:接口实验室2009年5月28日实验题目微机控制步进电机调速系统一、实验目的1、了解计算机控制步进电机原理。
2、掌握步进电机正转反转设置方法。
3、掌握步进电机调速工作原理及程序控制原理。
二、设备与环境硬件:TPC-2003A。
软件:Windows 98 操作系统、汇编语言编译器MASM。
三、实验内容1、按图(44)连接线路,利用8255 输出脉冲序列,开关K0~K6 控制步进电机转速,K7控制步进电机转向。
8255 CS 接288H~28FH。
PA0~PA3 接BA~BD;PC0~PC7 接K0~K7。
图(44)2、编程:当K0~K6 中某一开关为“1”(向上拨)时步进电机启动。
K7 向上打电机正转,向下打电机反转。
3、步进电机工作原理步进电机驱动原理是通过对每相线圈中的电流的顺序切换来使电机作步进式旋转。
驱动电路由脉冲信号来控制,所以调节脉冲信号的频率便可改变步进电机的转速。
如图(45)所示:本实验使用的步进电机用直流+5V 电压,每相电流为0.16A,电机线圈由四相组成,即:φ1(BA),φ2(BB),φ3(BC),φ4(BD)。
图(45)相φ1Φ2Φ3Φ4顺序0 1 1 0 01 0 1 1 02 0 0 1 13 1 0 0 1驱动方式为二相激磁方式,各线圈通电顺序如上表。
表中首先向φ1 线圈-φ2 线圈输入驱动电流,接着φ2-φ3,φ3-φ4,φ4-φ1,又返回到φ1-φ2,按这种顺序切换,电机轴按顺时针方向旋转;按相反顺序切换,电机轴按逆时针方向旋转。
实验中通过不同的开关控制不同长度的延时来得到不同频率的步进电机输入脉冲,从而得到多种步进速度。
步进电机正反转和调速控制中功能指令的应用
三菱FX2N系列PLC功能指令的应用
步进电机正反转和调速控制中功能指令的应用 五、部分功能指令
1、数据变换指令 BCD/BIN BCD变换指令的编号为FNC18。它是将源元件中的二进制数转换成BCD码 送到目标元件中,如图。如果指令进行16位操作时,执行结果超出0~9999 范围将会出错;当指令进行32位操作时,执行结果超过0~99999999范围也 将出错。
1、控制要求 以三相六拍步进电动机为例,要求PLC产生脉冲序列,作为步进 电动机驱动电源功放电路的输入。脉冲正序列为A-AB-B-BC-C-CA,脉 冲反序列CA-C-BC-B-AB-A。
2021/8/7
三菱FX2N系列PLC功能指令的应用
步进电机正反转和调速控制中功能指令的应用
2、PLC的I/O分配表:
(1)单三拍工作方式:三相步进电动如果按A-B-C-A方式循环通电工作, 就称这种工作方式为单三拍工作方式。
(2)双三拍工作方式:每次对两相同时三拍”,转子转动一个齿距角。
(3)三相六拍工作方式:即以一相和两相相间隔轮流通电的方式运行, 如A-AB-B-BC-C-CA。 2021/8/7
输入 总开关 手动/自动 单步按钮 反转按钮
输出
X0
A相功放电路
X1
B相功放电路
X2
C相功放电路
X3
3、接线图:
Y0 Y1 Y2
减速按钮
X4
加速按钮
X5
2021/8/7
三菱FX2N系列PLC功能指令的应用
步进电机正反转和调速控制中功能指令的应用 3、梯形图及程序分析 参阅配套课本
2021/8/7
电气控制与PLC技术
电气控制与PLC技术
28hd微型步进电机使用方法

28hd微型步进电机使用方法一、概述在现代电子设备和机械设备中,步进电机广泛应用于各类控制系统中。
28hd微型步进电机是一种小型、高效、精确度较高的步进电机,本文将详细介绍28hd微型步进电机的使用方法,包括其结构、工作原理、电路连接以及使用注意事项等方面。
二、结构与工作原理28hd微型步进电机采用了分步电机技术,其主要由电机本体、转子、定子和驱动电路组成。
它的工作原理基于每次电流改变一小步,从而使得转子转动一定角度的原理。
通过电流变化引起转子磁场变化,从而控制转子的位置。
三、电路连接为了正确驱动28hd微型步进电机,我们需要正确地连接电路。
具体连接方式如下所示:1.将步进电机的四个线圈(通常标记为A+、A-、B+、B-)分别与驱动电路的相应输出端口相连。
2.在连接电路之前,确保驱动电路符合28h d微型步进电机的电气参数要求,以避免过流或过热等问题。
四、使用方法使用28hd微型步进电机的方法如下:1.首先,确定步进电机的转动方向。
根据所需的转动方向连接电路,一般正转和反转可以通过调换两个线圈的连接顺序来实现。
2.然后,根据具体需要,选择合适的驱动电压和电流。
这个取决于实际应用中步进电机所需的功率和速度。
3.接下来,编写控制程序或使用控制器来控制步进电机的运动。
根据实际需求,可以通过改变电流频率和顺序来控制步进电机的精度和速度。
4.最后,根据实际情况进行优化调试,以确保步进电机的运动效果符合预期。
五、使用注意事项在使用28h d微型步进电机时,需要注意以下事项:1.驱动电压和电流不要超过步进电机的额定参数,以避免过载损坏电机。
2.在连接电路时,确保正常接地和正确连接,防止短路或电路故障。
3.在操作步进电机时,避免频繁启动和停止,以减少机械应力和电机损坏的风险。
4.定期检查电机的运行状态,及时清洁电机表面的灰尘和杂物,以维护电机的正常工作。
5.如果需要更高的精度和速度,可以考虑使用专业驱动器或控制器,并根据厂家提供的说明进行正确操作。
步进电机控制器说明手册
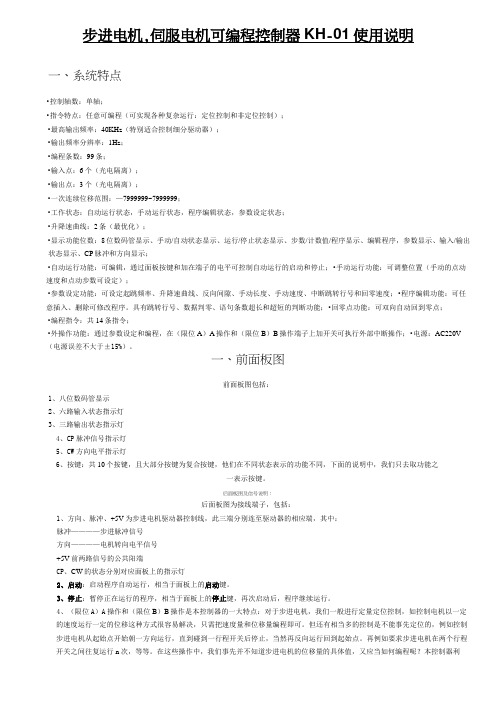
步进电机,伺服电机可编程控制器KH-01使用说明一、系统特点•控制轴数:单轴;•指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制);•最高输出频率:40KHz(特别适合控制细分驱动器);•输出频率分辨率:1Hz;•编程条数:99条;•输入点:6个(光电隔离);•输出点:3个(光电隔离);•一次连续位移范围:—7999999~7999999;•工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态;•升降速曲线:2条(最优化);•显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示;•自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止;•手动运行功能:可调整位置(手动的点动速度和点动步数可设定);•参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度;•程序编辑功能:可任意插入、删除可修改程序。
具有跳转行号、数据判零、语句条数超长和超短的判断功能;•回零点功能:可双向自动回到零点;•编程指令:共14条指令;•外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作;•电源:AC220V (电源误差不大于±15%)。
一、前面板图前面板图包括:1、八位数码管显示2、六路输入状态指示灯3、三路输出状态指示灯4、CP脉冲信号指示灯5、CW方向电平指示灯6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。
后面板图及信号说明:后面板图为接线端子,包括:1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中:脉冲————步进脉冲信号方向————电机转向电平信号+5V前两路信号的公共阳端CP、CW的状态分别对应面板上的指示灯2、启动:启动程序自动运行,相当于面板上的启动键。
PLC控制步进电机的方法 步进电机工作原理
PLC控制步进电机的方法步进电机工作原理一、引言微电子技术和计算机技术发展,可编程序控制器有了突飞猛进发展,其功能已远远超出了逻辑控制、顺序控制范围,它与计算机有效结合,可进行模拟量控制,具有远程通信功能等。
有人将其称为现代工业控制三大支柱(即PLC,机器人,CAD/CAM)之一。
目前可编程序控制器(Programmable Controller)简称PLC已广泛应用于冶金、矿业、机械、轻工等领域,为工业自动化提供了有力工具。
二、PLC基本结构PLC采用了典型计算机结构,主要包括CPU、RAM、ROM和输入/输出接口电路等。
把PLC看作一个系统,该系统由输入变量-PLC-输出变量组成,外部各种开关信号、模拟信号、传感器检测信号均作为PLC输入变量,它们经PLC外部端子输入到内部寄存器中,经PLC内部逻辑运算或其它各种运算、处理后送到输出端子,它们是PLC输出变量,由这些输出变量对外围设备进行各种控制。
三、控制方法及研究1、FP1特殊功能简介(1) 脉冲输出FP1输出端Y7可输出脉冲,脉冲频率可软件编程进行调节,其输出频率范围为360Hz~5kHz。
(2) 高速计数器(HSC)FP1内部有高速计数器,可同时输入两路脉冲,最高计数频率为10kHz,计数范围-~+。
(3) 输入延时滤波FP1输入端采用输入延时滤波,可防止因开关机械抖动带来不可靠性,其延时时间可需要进行调节,调节范围为1ms~128ms。
(4) 中断功能FP1中断有两种类型,一种是外部硬中断,一种是内部定时中断。
2、步进电机速度控制FP1有一条SPD0指令,该指令配合HSC和Y7脉冲输出功能可实现速度及位置控制。
速度控制梯形图见图1,控制方式参数见图2,脉冲输出频率设定曲线见图3。
图1 速度控制梯形图图2 控制方式参数东莞市斯泰普机电科技有限公司图3 脉冲输出频率设定曲线3、控制系统程序运行图4 控制系统原理图图4是控制系统原理接线图,图4中Y7输出脉冲作为步进电机时钟脉冲,经驱动器产生节拍脉冲,控制步进电机运转。
PLC如何控制步进电机

PLC如何控制步进机电之答禄夫天创作用三菱PLC的FX1S-14MT以切纸机为例,年夜致论述一下PLC控制步进机电的方法.*PL+,PL-:步进驱动器的脉冲信号端子,*DR+,DR-:步进驱动器的方向信号端子.为了简单明了地讲明PLC控制步进机电的方法,所以本例一切从简,只画了PLC的脉冲输出端Y0,方向控制端Y2与步进机电驱动器的脉冲信号端子,方向信号端子的接线方式.PLC输出真个内部结构如上图,其为NPN输出方式.所以其负载(驱动器的光电三极管)应该接在输出三极管的集电极.驱动器信号端子的内部结构图如上,其供电电压应该是5V,根据其电流参数计算,24V供电应该串连了一个2K左右的电阻.*个人认为24V串连电阻供电方式比5V供电抗干扰性要好,所以宁愿麻烦多串两个电阻.电气接线为:X0接启动按钮,X1接停止按钮.X2接切刀位置开关(切刀在下方切纸结束时接通).Y4控制切刀电磁阀.机械结构年夜致为:步进机电经过同步带带动压轮(周长40mm),也就是说步进机电转动一圈送纸40mm.切刀由电磁阀带动(实际应用切刀也用步进机电驱动更理想).根据机械结构与精度要求(误差小于0.1mm),本例将驱动器的设为4细分,也就是驱动器接收到800个脉冲步进机电转一圈,PLC输出一雎龀逅椭?.05mm.法式如下:本法式只为说明控制方法,没有认真考虑工作过程要求,法式严密性定然不够,不具备设计参考价值!第0步:设定基底速度120转/分(一转800个脉冲,1600HZ 就是每秒2转),加速时间100ms,最高速度600转/分(一转800个脉冲,8000HZ就是每秒10转).HZ(赫兹)是频率单元,每秒PLC输出的脉冲个数.第20步,22步:启动,停止把持.T0的延时有防干扰作用,停止按钮(X1)闭合时间不到100毫秒无效.20步的启动按钮应该再串连一个触点,防止再运行过程中按启动按钮,M0置位.(懒得改法式了)第26步:按停止按钮不是立刻停止,而是用M1来到达完成一个过程后再停止(送纸后,切刀完成再停止)第29步:本例送纸40mm,送纸机电速度600转/分,送纸结束M8147断开置位M2,开始切纸过程.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验接线
采用共阴极接法,正脉冲有效。 利用打印机数字口(地址0x378)控制步进电机驱动器,
D0
D1
控制方向,接 DIR+端
控制步进,接CP+ 端
DIR- 和 CP- 接地 细分开关置成 2细分状态,步距角 0.9º
#include <dos.h> #include <stdio.h>
程序举例
D7 D6 D5 D4
总线的概念
总线是连接多个数字系统或部件的公共信息通道,它由 若干公共信号线组成。 总线是传送信息代码的公共途径,由其构成系统与系统 之间,板与板之间,芯片与芯片之间标准的信息通道。 片内总线是微处理器芯片或其它接口器件集成电路内 的信息通道。 片间总线也称元件级总线或片总线,是由集成电路内部引 出的总线。通常是在一块印刷电路板内,实现电路板内各元 件相互连接的信号线。元件级总线通常包括地址线、数据线 和控制线。
ISA总线的数据线共16条,地址线共24条,接到总线上的中 断申请线共11条,DMA通道扩展为8个 ,时钟频率8MHz。
ISA总线数据采集卡
62+36=98线 数据线16条
62线 数据线8条
PCI局部总线
PCI总线支持33MHz,66MHz的时钟频率和32位、64位 数据宽度,即工作频率高,数据通道宽,传递数据快。 可与ISA、EISA、MCA等计算机总线配合工作。 有5V和3.3V两种信号环境。
定。该函数的说明中说milliseconds的单位是毫秒,
但对目前使用的PC系列微机来说,实际的延时时间要
比说明中规定的短,而且与CPU的主频有关。所以在
使用这个函数时,要测试一下在所使用计算机软、硬
件条件下,函数 delay( )的参数milliseconds实际 的延时单位。
实验要求
利用打印机数字口(地址0x378)控制步进电机驱动器, D0 控制方向 D1 控制步进 细分开关置成 2细分状态,步距角 0.9º 1.步进电机向某一方向转4周,然后再向另一方向转2周。 注意观察是否回到原来的起始位置(旋转结束后旋钮 的指向是否停在原来位置)。 2.提高步进电机转速,旋转5周。注意观察是否出现失步 现象估计步进电机的带载启动频率。 *3.编写“升速-恒速-减速”控制程序。起始频率应低于 步进电机的带载启动频,恒速运行时的频率应高于步 进电机的带载启动频。整个运行过程应是整圈数,注 意观察是否有振荡和丢步现象。
信号线功能
信号 D7~D0 25芯插座 9~2 36芯插座 9~2 数据线 功 能
STRORB
ACKNLG BUSY
1
10 11
1
10 11
数据选通脉冲
打印机应答信号,收到数据 打印机忙,不能接收新数据
PE
SLCT OUTPEEDXT
12
13 14
12
13 14
缺纸
表示打印机能工作 打印一行后,自动走纸
A口
端口地址: 60H
B口
61H
C口
62H
打印机口
通常PC机有两个并口:并口1,并口2。打印机通常接口1。每 个并口都包括数据口、状态口和控制口。 数据口 并口1 并口2 378H 278H 状态口 379H 279H 控制口 37AH 27AH
并口1在PC机后面板上是D型25针插座,在打印机上是D型36 线插座。
步进电机的特点: 1.电机旋转角度与输入脉冲成比例,角度误差小,不产生积累误差。 2.利用输入脉冲频率高低可做转速调整。
3.可采用开环控制,成本低。
4.电机的启动、停止、加速、减速、正反转反应快,容易控制 (动态反应快)。 5.可带负载低速运行,不必接减速器。 6.结构简单,可靠性高,使用寿命长。 7.低速时,可能产生震动和噪声。
目前有多个版本,发展前景良好。
PCI总线数据采集卡
带ISA和PCI槽的主板
ISA 插 槽
联想工控机无源底板上的ISA和PCI总线插槽
USB总线数据采集模块
HY-6160数字量输入/输出板
HY-6160是一种用于ISA总线的数字量输入/输出接口 板。HY-6160接口板为用户提供了32个数字量输入通道, 32个数字量输出通道,数字量输出通道上电清零。
标准工业结构总线ISA
ISA总线是在62引脚的PC/XT总线基础上扩展了36个引脚形成 的,共98个引脚分布在双面印刷板上。 ISA总线分成两部分, 左面一部分可接触62个引脚(A1~A31,B1~B31),与62引脚 的PC/XT总线基本兼容;右面一部分可接触36个引脚(C1~C18, D1~D18),是ISA总线扩展的部分。
电源电压 配套电机 :一组DC 24V :17HS001, 17HS101, 17HS111,23HS2001
电机与驱动器的连接
Ø CP+ Ø CP步进脉冲+ 步进脉冲-
Ø DIR+
Ø DIRØA ØA ØB
方向脉冲+
方向脉冲红 绿 蓝 转子
ØB
Ø+ Ø-
黄
DC24V/2A
细分开关设置
1 2 0 0 0 1 1 0 3 1 1 1 4 1 1 1 num 2 4 8 angle 0.9º 0.45º 0.225º
switch 3,4 kept 1
共阳极接法
CP+ 和 DIR+ 接在一起作为共阳端OPTO,接外部系统+5V。 脉冲信号接 CP-端,方向信号接 DIR-端。 CP=5V 高电平 脉冲宽度2μS 负脉冲方式 CP=0V 低电平
共阴极接法
CP- 和 DIR- 接在一起作为共阴端,接外部系统GND。 脉冲信号接 CP+端,方向信号接 DIR+端。 脉冲宽 度2μS 正脉冲方式 CP=5V 高电平 CP=0V 低电平
重量 : 0.2Kg
环境温度
绝缘电阻 温升 绝缘强度 配套驱动器
:-25~+55º C
:500V DC :75℃ Max :B :SH-2H042Ma 100MΩ Min
SH-2H042Ma步进电机驱动器
类别 相数 细分倍数 :混合式 :2/4 :2、4、8 (b型 2,5,10,20,40)
输出相电流 :1.7A
数字量输入通道数:
32
数字量输入组数:
数字量输出通道数: 数字量输出组数: 输入/输出电平: 输入电平:
4(8 bit / 组)
32 4(8 bit / 组) TTL电平兼容 VIH = 2.0 V (最小值)
VIL = 0.8 V
输出电平:
(最大值)
VOL = 0.4 V (最大值) VOH= 2.4 V (最小值) 最大值 IOH = - 400 A IOL = 8mA 最大值
ERROR
INIT SLCTIN
15
16 17
22
31 36
无纸、脱机、出错指示
初始化打印机 允许打印机工作
GND
18~25
19~30,33
地
控制口、状态口和数据口
控制口 即控制寄存器(8位),功能包括初始化打印机接 口及设置中断方式等。 状态口 即状态寄存器(8位),提供打印机工作状态,供 CPU读。 数据口 是一个8位单向输出端口,若不接打印机,可作为8 位输出端口,控制数码显示管、发光二极管、步进电机驱动 器等。
D1位交替输出高、低电平, 形成步进脉冲。 D0位是0时是某个转向, D0位是1时是另一个转向。
关于延时函数delay( )的一些说明
void delay (unsigend milliseconds )
该函数由头文件dos.h 说明。该函数可起到延时一段
时间的作用,延时时间的长短由参数milliseconds确
2 A7 128 80
3 A6 64 40
4 A5 32 20
5 A4 16 10
6 A有有效位之和 (ON为1)
ON
出厂设置
1 2 3 4 5 6
基地址=0x200+0x80=0x280
基地址+0 基地址+1 基地址+2 基地址+3 基地址+4 基地址+5 基地址+6 基地址+7
输出高电平电流: 输出低电平电流:
尺寸:10.7cm ×12.8cm×2.3cm
工作温度范围:0°~ +60°C 存储温度范围:-25°~ +85°C 湿度范围:> 90% (不结露) 电源功率消耗:+5V , 320mA 典型值
基地址 设置开关
HY-6160的I/O端口地址
ON
1 地址: A8 十进制: 256 十六进制:100
void plus( int m)
{outportb(0x378,0x00); delay(m); outportb(0x378,0x02); delay(m);}
控 制 步 进
控 制 方 向
D3 D2 D1 D0
0 0
0 0
0 0
0 0
0 0
0 0
0 1
0 0
main( )
{long n; for(n=0;n<160000;n++){ plus(20);} }
思考题与习题
1.若用打印机数字口D7位控制方向,D0位控制步进,写出 控制程序。
2.用定时中断的方法定时产生脉冲,写出出程序。 3.编写“升速——恒速——减速——停止”运动程序,恒速运 行时电机的转速要超过电机的启动频率。 4. 怎样测试函数 delay( )的参数milliseconds实际的延时时间?
写D/O0组输出寄存器的 写D/O1组输出寄存器的 写D/O2组输出寄存器的 写D/O3组输出寄存器的 读D/I0组输入缓冲器的 读D/I1组输入缓冲器的 读D/I2组输入缓冲器的 读D/I3组输入缓冲器的