步进电机闭环运动控制系统研究
步进电机闭环控制系统方案

几种典型的步进电机闭环控制系统工业大学【摘要】系统阐述了步进电动机闭环控制系统的优点,给出了几种典型的闭环控制系统,并提出了步进电动机高精度定位系统的设计思想。
【叙词】步进电机闭环系统/高精度定位l概述步进电机是机电一体化产品中的关键元件之一,是一种性能良好的数字化执行元件。
它能够将电的脉冲信号转换成相应的角位移,是一种离散型自动化执行元件。
随着计算机控制系统的发展,步进电动机广泛应用于同步系统、直线及角位系统、点位系统、连续轨迹控制系统以及其它自动化系统中,是高科技发展的一个重要环节。
2步进电动机闭环系统与开环系统比较[1-步进电机的主要优点之一是适于开环控制。
在开环控制下,步进电动机受具有予定时间间隔的脉冲序列所控制,控制系统中无需反馈传感器和相应的电子线路。
这种线路具有简单、费用低的特点,使步进电动机的开环控制系统得以广泛的应用。
但是,步进电机的开环控制无法避免步进电动机本身所固有的缺点,即共振、振荡、失步和难以实现高速。
另一方面,开环控制的步进电动机系统的精度要高于分级是很困难的,其定位精度比较低。
因此,在精度和稳定性标准要求比较高的系统中,就必须果用闭环控制系统。
步进电动机的闭环控制是采用位置反馈和(或)速度反馈来确定与转子位置相适应的相位转换,可大大改进步进电动机的性能。
在闭环控制的步进电机系统中,或可在具有给定精确度下跟踪和反馈时,扩大工作速度围,或可在给定速度下提高跟踪和定位精度,或可得到极限速度指标和极限精度指标。
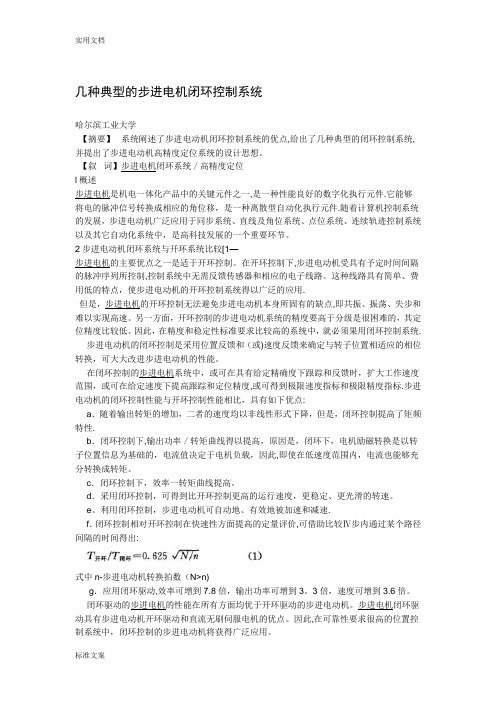
步进电动机的闭环控制性能与开环控制性能相比,具有如下优点:a.随着输出转矩的增加,二者的速度均以非线性形式下降,但是,闭环控制提高了矩频特性。
b.闭环控制下,输出功率/转矩曲线得以提高,原因是,闭环下,电机励磁转换是以转子位置信息为基础的,电流值决定于电机负载,因此,即使在低速度围,电流也能够充分转换成转矩。
c.闭环控制下,效率一转矩曲线提高。
d.采用闭环控制,可得到比开环控制更高的运行速度,更稳定、更光滑的转速。
开环步进电机与闭环步进电机系统比较

开环步进电机与闭环步进电机系统比较步进电机系统是运动控制行业的基石。
我们将研究开环系统与闭环系统之间的差异,并了解步进电机最新的发展,步进电机系统比以往更快,更安静,更节能。
从电压驱动和完全步进的早期阶段开始,步进电机系统已经走过了漫长的道路。
首先是PWM驱动和微步进,然后是数字信号处理器(DSP)和反共振算法。
现在,新的闭环步进技术确保步进电机在未来几年继续成为运动控制行业的基石。
这是AppliedMotionProducts的StepSERVO闭环集成步进电机的剖视图。
无论运动是线性运动还是旋转运动,决定哪种电机和驱动系统最合适的两个首要考虑因素是扭矩和效率。
这适用于最终的应用是:自动装配系统,材料处理机器,3D打印机,笛卡尔定位器,蠕动泵,还是无数其他应用,其中步进电机是优选技术方案。
步进系统的最新发展是应用低成本,高分辨率的反馈设备和先进的DSP使步进运动形成一个闭环的环路。
这种控制可以提高闭环步进性能,使其优于开环系统。
正如我们所看到的,一个这样的闭环系统在集成电机设计上得以实现,包括反馈设备,驱动器和控制器板,电源,通信和I/O电子设备,以及电机侧面和背面的系统连接器。
开环与闭环步进系统比较首先让我们探讨高性能闭环步进系统在扭矩和效率方面与传统开环步进系统的比较。
闭环步进系统优于开环系统,如实验室测试结果所示,比较两个系统的加速度(扭矩),效率(功耗),位置误差(精度),发热量和噪音水平。
只考虑扭矩和加速度之间的关系。
扭矩-速度曲线显示闭环步进系统的峰值和连续扭矩范围明显优于开环步进系统的可用扭矩范围。
通常情况下,现实世界中的扭矩会转化为加速度-因此具有更大扭矩的电机可以更快地加速给定负载。
为了在实验室中测试扭矩性能的这种差异,同样大小的开环和闭环步进电机系统获得相同的惯性负载。
编程命令两个系统执行相同的移动配置文件,除了加速率和最高速度在每个系统中缓慢增加,直到它们产生定位错误。
这里我们有一个开环与闭环系统之间的移动剖面比较。
步进电机的开环控制和闭环控制
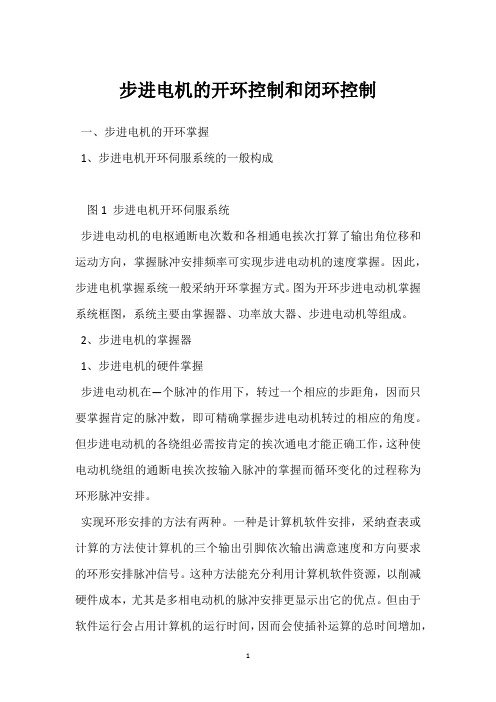
步进电机的开环控制和闭环控制一、步进电机的开环掌握1、步进电机开环伺服系统的一般构成图1 步进电机开环伺服系统步进电动机的电枢通断电次数和各相通电挨次打算了输出角位移和运动方向,掌握脉冲安排频率可实现步进电动机的速度掌握。
因此,步进电机掌握系统一般采纳开环掌握方式。
图为开环步进电动机掌握系统框图,系统主要由掌握器、功率放大器、步进电动机等组成。
2、步进电机的掌握器1、步进电机的硬件掌握步进电动机在—个脉冲的作用下,转过一个相应的步距角,因而只要掌握肯定的脉冲数,即可精确掌握步进电动机转过的相应的角度。
但步进电动机的各绕组必需按肯定的挨次通电才能正确工作,这种使电动机绕组的通断电挨次按输入脉冲的掌握而循环变化的过程称为环形脉冲安排。
实现环形安排的方法有两种。
一种是计算机软件安排,采纳查表或计算的方法使计算机的三个输出引脚依次输出满意速度和方向要求的环形安排脉冲信号。
这种方法能充分利用计算机软件资源,以削减硬件成本,尤其是多相电动机的脉冲安排更显示出它的优点。
但由于软件运行会占用计算机的运行时间,因而会使插补运算的总时间增加,从而影响步进电动机的运行速度。
另一种是硬件环形安排,采纳数字电路搭建或专用的环形安排器件将连续的脉冲信号经电路处理后输出环形脉冲。
采纳数字电路搭建的环形安排器通常由分立元件(如触发器、规律门等)构成,特点是体积大、成本高、牢靠性差。
2、步进电机的微机掌握:目前,伺服系统的数字掌握大都是采纳硬件与软件相结合的掌握方式,其中软件掌握方式一般是利用微机实现的。
这是由于基于微机实现的数字伺服掌握器与模拟伺服掌握器相比,具有下列优点:(1)能明显地降低掌握器硬件成本。
速度更快、功能更新的新一代微处理机不断涌现,硬件费用会变得很廉价。
体积小、重量轻、耗能少是它们的共同优点。
(2)可显著改善掌握的牢靠性。
集成电路和大规模集成电路的平均无故障时(MTBF)大大长于分立元件电子电路。
(3)数字电路温度漂移小,也不存在参数的影响,稳定性好。
步进电机闭环控制系统

步进电机闭环控制系统几种典型的步进电机闭环控制系统哈尔滨工业大学【摘要】系统阐述了步进电动机闭环控制系统的优点,给出了几种典型的闭环控制系统,并提出了步进电动机高精度定位系统的设计思想。
【叙词】步进电机闭环系统/高精度定位l概述步进电机是机电一体化产品中的关键元件之一,是一种性能良好的数字化执行元件。
它能够将电的脉冲信号转换成相应的角位移,是一种离散型自动化执行元件。
随着计算机控制系统的发展,步进电动机广泛应用于同步系统、直线及角位系统、点位系统、连续轨迹控制系统以及其它自动化系统中,是高科技发展的一个重要环节。
2步进电动机闭环系统与开环系统比较[1-步进电机的主要优点之一是适于开环控制。
在开环控制下,步进电动机受具有予定时间间隔的脉冲序列所控制,控制系统中无需反馈传感器和相应的电子线路。
这种线路具有简单、费用低的特点,使步进电动机的开环控制系统得以广泛的应用。
c.闭环控制下,效率一转矩曲线提高。
d.采用闭环控制,可得到比开环控制更高的运行速度,更稳定、更光滑的转速。
e.利用闭环控制,步进电动机可自动地、有效地被加速和减速。
f.闭环控制相对开环控制在快速性方面提高的定量评价,可借助比较Ⅳ步内通过某个路径间隔的时间得出:式中n-步进电动机转换拍数(N>n)g.应用闭环驱动,效率可增到7.8倍,输出功率可增到3.3倍,速度可增到3.6倍。
闭环驱动的步进电机的性能在所有方面均优于开环驱动的步进电动机。
步进电机闭环驱动具有步进电动机开环驱动和直流无刷伺服电机的优点。
因此,在可靠性要求很高的位置控制系统中,闭环控制的步进电动机将获得广泛应用。
3编码器形式的步进电动机阕环控制系统步进电机的闭环控制最早是采用编码器的形式,图1是其原理示意图。
初始状态,系统受一相或几相激磁而静止。
开始工作后,先把目标位置送入减法计数器;然后,“起动”脉冲信号加到控制单元上,控制单元在“起动”脉冲的作用下,立即把步进命令送入相序发生器,使激磁变化一次,后续的脉冲则由编码器装置产生。
步进电机闭环控制系统

步进电机闭环控制系统步进电机基本上以开环电路驱动,用于位置控制。
换句话说,步进电机以外的电机尤其是高精度的步进电机之外并没有做开环控制定位的,而用开环电路驱动的电机只有步进电机。
例如无刷电机,首先为切换相,需要测出转子位置,需要含位置传感器的位置闭环电路。
而且如果按一定速度驱动,需测出转子的速度,此为速度闭环电路;如果想定位控制,需要含有转子位置信号的编码器等传感器的闭环电路。
与开环驱动的步进电机相比较,含传感器的闭环电路成本较高。
因此,步进电机被称为速度控制或位置控制的低成本驱动系统。
步进电机的开环电路驱动在高速转动时,有失步、振动(噪声)以及高速运行困难等问题。
为了弥补这些缺点,步进电机安装角度传感器,形成闭环控制,用以检测并避免失步。
步进电机的闭环控制方式大致分为两种:1.使激磁磁通与电流的相位关系保持一致,使其产生能带动负载转矩的电磁转矩,这种控制电机电流的方式与无刷直流电机控制方式相同,称为无刷驱动方式或电流闭环控制方法。
2.电机电流保持一定,控制激磁磁通与电流相位角的方式,称为功率角闭环控制方法。
功率角为转子磁极与定子激磁相(或认为是同步电机的定子旋转磁场轴线也可以)相互吸引所成的相位角。
此功率角在低速时或轻载时较小,高速时或高负载时较大。
引用前文开环控制的原理部分中的下图所示,“杠A”相吸引转子磁极,其次“杠B”相激磁时的角度有π/2,转子磁极位于“杠A”相前缘(图中转子的S 极位于A相的左侧)时,使磁极“杠B”相开始激磁。
3.4.为什么?因为高速时,受线圈电感的影响,使A相电流的关断时间延长,B相电流上升时间也延长,因此,产生最大转矩加速的角度,其值随速度变快而变大。
基于PLC步进电机位置闭环控制研发与应用

n 几
z
n r 几 … … … r - _ ] ]
几
…… 一 ——r L
图 1 A相 、 相 、 B Z相 脉 冲 波 形 图
器 驱 动 步进 电机 带 动 小 车运 行 。 小车 运行 轨 迹 上 安装 有位 移 监 测
的 D -0 A 3 0光 栅尺 , 轨道 上 安装 有左 、 限 位 开关 和原 点 开关 , 在 右 从
图 2 系统模型 图
2 / 机 脉 冲 信 号 的频 率 , 以对 电机 精 确 调 速 : 制 步 进 脉 冲 的 个 数 , 2. Io 分 配 表 可 控 IO分配 表 如表 l 示 。 / 所 可 以对 电机 精确 定 位 。
12 步 进 电机 的选 型 .
表 1 IO分配 表 /
Q. oo Q. o限 位 原 点检 测
I. 22 I- 23
本 系统 中采用 两 相 混合 式 步 进 电机 驱 动器 Y A 4 4 K 2 0MC细 分
驱动 器 。
14 光 栅 尺 .
量 s i n 坌 hi Fx e ue y
基于 P C步进 电机 位置 闭环控制研 发 与应用 L
董学 文 陈 白宁
( 沈阳理 工大 学机械工程学 院, 辽宁 沈阳 10 5 ) 19 1 摘 要 : P C高速脉冲输 出功能控制步进 电机的基础上 , 析了步进 电机 的控制 特点 , 在 L 分 利用光栅 尺作为步进 电机 的位 置检测装 置及反馈 装
运行 , 从而 实现 此 类 系统 的 闭环 控制 。
1 系 统 模 型 介 绍
1 1 运 动 控 制 系 统 简 介 .
运 动 控 制系 统 是 一 门有 关如 何 对 物体 位 置和 速 度 进 行精 密 控 制 的技 术 , 型 的 运 动控 制 系 统 由 3部 分 组 成 : 制 部 分 、 动 部 典 控 驱 分 和执 行 部 分 。 步 进 电机 的运 行 要 有一 电子装 置 进行 驱 动 , 该装 置 就 是 步进 电机 驱动 器 , 是 把控 制 系 统 发 出的 脉冲 信 号 , 以放 大 以驱动 步 它 加 进 电机 。 进 电机 的转 速 与脉 冲信 号的 的频 率 成正 比, 步 控制 步进 电
步进电机闭环操控体系

步进电机闭环操控体系1、步进电机的闭环操控最早是选用编码器的办法。
初始状况,体系受一相或几相激磁而连续,开端作业后,先把方针方位送入减法计数器,然后,“起动”脉冲信号加到操控单元上,操控单元在“起动”脉冲的效果下,当即把步进指令送入相序发作器,使激磁改动一次,后续的脉冲则由编码器设备发作。
编码器每发作一个脉冲,就对法计数器减1,因而,减法计数器记载的是实习的转子方位。
当减法计数器的计数减至零时,宣告一个连续信号到操控单元,阻遏往后的步进指令,体系连续作业。
关于低分辩率的步进电机,通常运用一个开了槽的圆盘和光电传感器作为反响编码器的组合件,槽口的数目等于电机每转所走的步数;关于高分辩率的步进电机,则需选用高分辩率的增量编码器,如旋改动压器增量编码器,感应同步器增量编码器等。
因为反响编码器报价宝贵,并且为了把编码器安放到步进电机的轴上,央求体系具有更大的体积,这两大缺点绑缚了编码器办法的步进电机闭环操控体系的运用。
2、波形查看办法的步进电机闭环操控体系波形查看办法的步进电机闭环操控体系的原理是通过对步进电机相电流或绕组反电势(或绕组反电势所构成的使的电流)的查看,直接得到转子方位信息,反响到操控单元发作操控脉冲,操控步进电机运动。
波形查看器是由简略的电子线路构成,报价廉价,假定需求,可直接设备在操控器逻辑线路中,步进电机不需附加的机械联接。
3、运用电流查看的步进电机闭环操控体系用电流查看的步进电机闭环操控是依据某些反响式步进电机的相电流在必定速率计划内呈现正的或负的极值这一概念进行的。
对体系加初始起动脉冲,电机起动,当相电流呈现极值的刹那间,波峰查看线路瞬时发作一个脉冲或许守时信号,反响给操控单元,作为后续脉冲,结束了步进电机的闭环操控。
值得留神的是,电机导通相电流和截止相电流均或许呈现若干个波峰,应在哪一种状况下进行查看,可依据电机的实习作业断定,电流查看可通过在电流回路中刺进一个已知阻值的小电阻,丈量电流转过期的电压结束,波峰查看线路通常均选用仿照微分法,波峰用di/dt通过零值标明。
步进电机闭环控制系统
几种典型的步进电机闭环控制系统哈尔滨工业大学【摘要】系统阐述了步进电动机闭环控制系统的优点,给出了几种典型的闭环控制系统,并提出了步进电动机高精度定位系统的设计思想。
【叙词】步进电机闭环系统/高精度定位l概述步进电机是机电一体化产品中的关键元件之一,是一种性能良好的数字化执行元件.它能够将电的脉冲信号转换成相应的角位移,是一种离散型自动化执行元件.随着计算机控制系统的发展,步进电动机广泛应用于同步系统、直线及角位系统、点位系统、连续轨迹控制系统以及其它自动化系统中,是高科技发展的一个重要环节。
2步进电动机闭环系统与开环系统比较[1—步进电机的主要优点之一是适于开环控制。
在开环控制下,步进电动机受具有予定时间间隔的脉冲序列所控制,控制系统中无需反馈传感器和相应的电子线路。
这种线路具有简单、费用低的特点,使步进电动机的开环控制系统得以广泛的应用.但是,步进电机的开环控制无法避免步进电动机本身所固有的缺点,即共振、振荡、失步和难以实现高速。
另一方面,开环控制的步进电动机系统的精度要高于分级是很困难的,其定位精度比较低。
因此,在精度和稳定性标准要求比较高的系统中,就必须果用闭环控制系统.步进电动机的闭环控制是采用位置反馈和(或)速度反馈来确定与转子位置相适应的相位转换,可大大改进步进电动机的性能。
在闭环控制的步进电机系统中,或可在具有给定精确度下跟踪和反馈时,扩大工作速度范围,或可在给定速度下提高跟踪和定位精度,或可得到极限速度指标和极限精度指标.步进电动机的闭环控制性能与开环控制性能相比,具有如下优点:a.随着输出转矩的增加,二者的速度均以非线性形式下降,但是,闭环控制提高了矩频特性.b.闭环控制下,输出功率/转矩曲线得以提高,原因是,闭环下,电机励磁转换是以转子位置信息为基础的,电流值决定于电机负载,因此,即使在低速度范围内,电流也能够充分转换成转矩。
c.闭环控制下,效率一转矩曲线提高。
d.采用闭环控制,可得到比开环控制更高的运行速度,更稳定、更光滑的转速。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RESEARCH ON CLOSED-LOOP MOTION CONTROL SYSTEM FOR STEP MOTOR
Candidate: Supervisor: Academic Degree Applied for: Speciality: Affiliation: Date of Defence:
-I-
哈尔滨工业大学工学硕士学位论文
Abstract
Step motor has many advantages, such as it can start and stop quickly as well as its speed can be tuned in a wide range, so it is commonly used as an actuator in industrial control. As the step motor can locate at a limited accuracy, so it is appropriate for some applications which need low precision when worked at open-loop control state. But when it works at open-loop control state, the controller just takes charge of sending a series pulses according to predetermined program, while it can't detect whether the rotation angle of the motor or the distance of the load according to controller’s directive. So the controller may lost control to the load when the motor is out of step or the deviation becomes too large due to mechanical reasons. In order to make the controller strengthen the control to the load, the closed-loop motion system for the step motor is studied. The key to the closed-loop control for step motor motion system is how to control the speed of the step motor, because the average speed of movement in the whole operation routing determines the efficiency of the system, and another reason is that the position control is achieved by speed control. Firstly, in order to take full advantage of the available high-torque when the step motor running at low speed, the acceleration control of the step motor is discussed. Step motor can adopt three accelerated curves during accelerating, and these three curves’ characteristics are analyzed. Next, a mathematical model of the step motor motion system is established, which can be used for analyzing the accelerate effect through Matlab simulation when the step motor adopt different accelerating curve. Then two closed-loop frames have been designed: one is setting step motor as control objective, another is setting load flat as control objective. In order to alleviate the burden of the controller for calculating in some applications, two control methods are given: part-closed-loop and full-closed-loop. According to the difference between the processing units, closed-loop control could be divided into computer-based closed-loop control and controller-based closed-loop control. These two kinds of closed-loop control are implemented, and the effects of them are analyzed through experiments. Keywords: step motor, closed-loop, speed control, motion controller
- II -
哈尔滨工业Hale Waihona Puke 学工学硕士学位论文目录
摘要 ............................................................................................................................. I Abstract ...................................................................................................................... II 第 1 章 绪论 ...............................................................................................................1 1.1 课题背景及研究的目的和意义 .......................................................................1 1.2 步进电机简介 ...................................................................................................2 1.2.1 步进电机的构造 ........................................................................................2 1.2.2 步进电机的运转原理 ................................................................................3 1.2.3 步进电机的细分技术 ................................................................................6 1.3 步进电机的控制方式 .......................................................................................7 1.3.1 步进电机的开环控制 ................................................................................7 1.3.2 步进电机的闭环控制 ................................................................................8 1.3.3 步进电机开环控制和闭环控制比较 ........................................................8 1.4 论文主要内容 .................................................................................................10 第 2 章 步进电机的加减速控制 .............................................................................. 11 2.1 T型曲线加速与速度规划 .............................................................................12 2.2 S型曲线加速与速度规划 .............................................................................15 2.3 正矢曲线加速与速度规划 .............................................................................20 2.4 不同加速方法比较 .........................................................................................23 2.5 本章小结 .........................................................................................................24 第 3 章 步进电机的建模与仿真 .............................................................................. 25 3.1 运动平台的数学模型 .....................................................................................25 3.2 以电压为输入信号的仿真分析 .....................................................................26 3.3 以位置—时间曲线为输入时的仿真分析 ......................................................29 3.4 本章小结 .........................................................................................................31 第 4 章 步进电机闭环运动系统的设计与分析 ...................................................... 32 4.1 步进电机闭环的运动系统的结构 ..................................................................32 4.1.1 对步进电机闭环的运动系统 ..................................................................32 4.1.2 对负载平台闭环的运动系统 ..................................................................33 4.2 步进电机闭环运动系统的控制 .....................................................................34