《交流电动机》PPT课件
合集下载
《交流电动机》课件

通过调节电压和频率实现平稳启动。
交流电动机的转速控制方法
1 电阻调速
2 变频调速
3 矢量控制
通过改变转子电阻来改变转 速。
通过调节电源频率来改变转 速。
实时监测电机运行状态并调 节力矩和转速。
额定功率及以下交流电动机的维护保养
定期清洁
清除灰尘和其他杂质,并确保散 热良好。
润滑
定期检查和更换润滑油。
转子运动
2
转子由于磁场的变化而受到电磁力的作用,
产生转动力矩。
3
转子滑差
转子滑差决定了转速与旋转磁场之间的相对 运动。
交流电动机的构造和组成部分
定子
由定子线圈和铁心组成,产生旋转磁场。
转子
由铁芯和绕组组成,受到旋转磁场的作用。
Байду номын сангаас
端盖
将定子和转子安装在一起,并提供机械支撑。
轴承
支撑转子并降低摩擦。
交流电动机的工作性能参数
密封检查
检查密封件并更换损坏的密封件。
额定功率 额定电压 效率 功率因数
电动机设计和制造的标称功率。 电动机设计和制造的标称电压。 电动机的输出功率和输入功率之间的比率。 电动机的实际功率和视在功率之间的比率。
交流电动机的启动方式和运行控制
1
星三角启动
2
先将电动机连接成星形,然后切换为三角形。
3
直接启动
电动机在额定电压下直接启动。
变频启动
《交流电动机》PPT课件
交流电动机是现代工业中最常见的电动机类型之一。本课件将深入介绍交流 电动机的基本原理、分类及应用、工作原理、构造和组成部分等内容,旨在 为大家提供全面且深入的了解。
交流电动机的基本原理
交流电动机的转速控制方法
1 电阻调速
2 变频调速
3 矢量控制
通过改变转子电阻来改变转 速。
通过调节电源频率来改变转 速。
实时监测电机运行状态并调 节力矩和转速。
额定功率及以下交流电动机的维护保养
定期清洁
清除灰尘和其他杂质,并确保散 热良好。
润滑
定期检查和更换润滑油。
转子运动
2
转子由于磁场的变化而受到电磁力的作用,
产生转动力矩。
3
转子滑差
转子滑差决定了转速与旋转磁场之间的相对 运动。
交流电动机的构造和组成部分
定子
由定子线圈和铁心组成,产生旋转磁场。
转子
由铁芯和绕组组成,受到旋转磁场的作用。
Байду номын сангаас
端盖
将定子和转子安装在一起,并提供机械支撑。
轴承
支撑转子并降低摩擦。
交流电动机的工作性能参数
密封检查
检查密封件并更换损坏的密封件。
额定功率 额定电压 效率 功率因数
电动机设计和制造的标称功率。 电动机设计和制造的标称电压。 电动机的输出功率和输入功率之间的比率。 电动机的实际功率和视在功率之间的比率。
交流电动机的启动方式和运行控制
1
星三角启动
2
先将电动机连接成星形,然后切换为三角形。
3
直接启动
电动机在额定电压下直接启动。
变频启动
《交流电动机》PPT课件
交流电动机是现代工业中最常见的电动机类型之一。本课件将深入介绍交流 电动机的基本原理、分类及应用、工作原理、构造和组成部分等内容,旨在 为大家提供全面且深入的了解。
交流电动机的基本原理
交流电动机工作原理及特性

n=0 即转差率S=1时转子切割磁力线最剧烈 f 2=f 1, 即转差率S=1时转子切割磁力线最剧烈 n=n0 即S=0时转子不切割磁力线f 2=0, S=0时转子不切割磁力线 =0, 时转子不切割磁力线f 额定工况下S=1.5~6%, =50Hz时 额定工况下S=1.5~6%,f1=50Hz时,f2=0.75~3Hz
交流 电动机
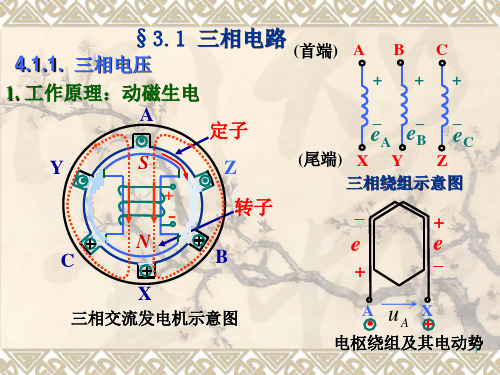
三相异步电动机的结构和工作原理 §4.1 三相异步电动机的结构和工作原理 一. 结构 1.定子 三相绕组 A ----X ----X B ----Y ----Y C---- Z
鼠笼式:如铸铝形成转子绕组 鼠笼式: 2.转子 绕线式 鼠笼转子
二. 工作原理 1.旋转磁场的产生(1对磁极) 旋转磁场的产生( 对磁极) 定子三相绕组通入 三相交流电
2.旋转磁场的旋转方向 . 任意调换两根电源进 线就使磁场反转。 线就使磁场反转。
Im Im
0 o
i i A
iB iC
ωt
A A
iA
A Z X Y C B
B A A
S
Z
Y Z C
Y
iB
iC
S
N
B X
C
N
X
ωt = 0
ω t = 60°
3.磁极对数P与磁场转速n0 3.磁极对数 与磁场转速n 磁极对数P 若定子每相绕组由两个线圈串联 ,绕组的始端之间互 差60°,将形成两对磁极(P=2,即4极)旋转磁场。 60° 将形成两对磁极(P=2, 两对磁极 旋转磁场。
R2与X2对电机影响均大
4. 转子电流 I2
R2 + (SX20 )2 2 E 20 s = 1(n = 0) → I2max = 2 2 R 2+ X 20 s = 0(n = n0 ) → I2 = 0 n ↓→S ↑→I2 ↑ ϕ 5. 转子电路的功率因数 cosϕ2 R2 R2 cosϕ2 = = 2 2 2 2 R2 + X2 R2 + (SX20 )
第4章 交流电动机的磁动势、绕组和感应电动势

60 f p
三相笼形异步电机和三相绕线式异步电动机
4.1 交流电机绕组产生的磁动势
定子绕组: 安放在定子铁心
槽里的交流电
枢绕组。
线圈
交流绕组的一些基本量
(1)电角度与机械角度 • 电机圆周在几何上分成 360°,这个角度称为机
械角度 • 若电机磁场在空间按正弦规律分布 • 当有导体经过 N、S 一对磁极时 • 导体中所感应(正弦)电动势的变化为一个周期,
1t
)
121NNy 2
y
2I cos1t 2I cos1t
2
2
3
2
2
4.1 交流电机绕组产生的磁动势
4.1.1 单相集中整距绕组的磁动势
4. 磁动势的幅值随时间变化
• 时间不同,磁动势的幅值大小也不同,磁动势的 幅值在随时间交变。(P74 图4-2)
• 或者可以把这种交变称为脉振。 • 这种不能移动只能脉振的磁动势,叫脉振磁动势。
磁动势以傅氏级数展开后的表示式为:
f ( ,1t) f1 f3 f5...
41
2
2
I1N1 p
c os1t
cos
1 3
4
1 2
2
I1N1 p
c os1t
cos3
1 4 1
5 2
2
I1N1 p
c os1t
cos5
...
公式中只列出了基波、3次和5次谐波,还有7次、9 次等高次谐波。
图4.4 矩形波磁动势的基波及谐波分量
fy
X
A2
X
O
1
2 iN y
a
A
X
2
4.1 交流电机绕组产生的磁动势
哈尔滨工业大学交流电动机课程PPT课件
返回
iA
iC C iB
A
ZX Y B
Y
参考方向:绕组
始端到末端的方
向
C
iA Im
A
NZ
B
S
X
iB iC
t
合成磁场方向:
向下
t 0 18 返回
同理分析,可得
Im
其它电流角度下
的磁场方向
n 0 60
A
Y
Z
N
CS
B
X
t60
iA iB iC
t
n0
A
Y
Z
C
B
X
t 120 19 返回
可见,当定子绕组中通入三相电流后,它 们共同产生的合成磁场是随着电流的交变而在 空间不断地旋转着,这就是旋转磁场。
A
C'
N •B
X A'
•
Z' X'
X' S
iC
C' Y' Y Z B'
C
B' B
•
N
•
SX
C
iB
Z
A'
Y
即:P=2
23
返回
4. 旋转磁场的转速
旋转磁场的转速决定于磁场的极数,在一对极的
情况下,当电流交变一次时,磁场恰好在空间旋转了
一周。
I m iA iB iC
t
Hale Waihona Puke N0=60f(转/分)A Y NZ
C
第8章 交流电动机
1返回
目录
8.1 三相异步电动机的构造 8.2 工作原理 8.3 三相异步电动机的电路分析 8.4 转矩与机械特性 8.5 三相异步电动机的使用 8.6 铭牌数据 8.7 单相异步电动机
交流电动机

n0 n s 100% 1000 975 100% 2.5% 1000 n0
总目录 章目录 返回 上析
三相异步电动机的电磁关系与变压器类似。 定子绕组—一次绕组 转子绕组—二次绕组 旋转磁通—主磁通 转子电路自行闭合,且转子转动 i1 i2 变压器: 变化 e - + U1 E1= 4.44 f N1 + e1 e2 E2= 4.44 f N2 - + u1 - + E 、E 频率相同,都等
总目录 章目录 返回
电工技术
上一页 下一页
电工技术
第7章 交流电动机
本章要求:
1. 了解三相交流异步电动机的基本构造和转动 原理。 2. 理解三相交流异步电动机的机械特性,掌握 起动和反转的基本方法, 了解调速和制动的 方法。 3. 理解三相交流异步电动机铭牌数据的意义。
总目录 章目录 返回
上一页 下一页
电工技术
电机:实现电能和机械能相互转换的电气设备。 有发电机和电动机两种运行形式。 电动机的分类: 交流电动机 电动机 直流电动机
同步电动机
异步电动机 三相电动机
鼠笼式
单相电动机
绕线式
他励、并励电动机
串励、复励电动机
总目录 章目录 返回
上一页 下一页
电工技术
7.1 三相异步电动机的构造
1.定子
铁心:由内周有槽 的硅钢片叠成。 三相绕组
总目录 章目录 返回 上一页 下一页
7. 2. 3 转差率
电工技术
描述转子转速与旋转磁场转速相差的程度。 旋转磁场的同步转速和电动机转子转速之差与 旋转磁场的同步转速之比称为转差率。
n0 n s n 100% 0 运行中: 起动瞬间:s = 1
机电传动控制(第6章)交流电动机的工作原理及特性

某些生产机械需要高启动转矩低启动电流的要求。 线绕式异步电动机由于能在转子电路中串电阻,因此具有较大
的启动转矩和较小的启动电流,即具有较好的启动特性。 1.逐级切除启动电阻法
6.4 三相异步电动机的调速特性
T
K
R22
SR2U 2 (SX20 )2
n (1 S) 60 f P
5.37
只要改变U 、R、f、P就可 攺变速度
定子和转子电路中不串联任何电阻或电抗时的机械特性称为固有
(自然)机械特性。
根据
T
K
R22
SR2U 2 (SX20 )2 NhomakorabeaS n0 n n0
1T 0,n n0 ,S 0
理想空载工作点:
2T TN ,n nN , S SN
额定工作点:
(1) (2)
(4)
TN
9.55
PN nN
3T Tst ,n 0, S 1
此时电机端电压为电源电压减去定子外串电阻和电抗上的压降。
(3)改变定子电源频率时的人为特性
n0
60 f p
n0 f Sm 1/ f
Sm
R2 X 20
n0 nm n0
Tm a x
K
U2 2 X 20
Tst 1/ f Tmax不变
Tst
K
R2U 2
R22
X
2 20
Tm a x
TN
注意: 调速时保持U / f 常数
过闸刀开关或接触器直接接入电源,在额 定电压下进行启动。
• 特点:电动机定子绕组的工作电压和 启动电压相等。
• 对象:小容量电动机。
2.电阻或电抗器降压启动
特点:
启动转矩随定子电压的平方下降,故它只适用于空载或轻载启动的场合; 不经济,在启动过程中,电阻器上消耗能量大,不适用于经常启动的电动机, 若采用电抗器代替电阻器,则所需设备费较贵,且体积大。
的启动转矩和较小的启动电流,即具有较好的启动特性。 1.逐级切除启动电阻法
6.4 三相异步电动机的调速特性
T
K
R22
SR2U 2 (SX20 )2
n (1 S) 60 f P
5.37
只要改变U 、R、f、P就可 攺变速度
定子和转子电路中不串联任何电阻或电抗时的机械特性称为固有
(自然)机械特性。
根据
T
K
R22
SR2U 2 (SX20 )2 NhomakorabeaS n0 n n0
1T 0,n n0 ,S 0
理想空载工作点:
2T TN ,n nN , S SN
额定工作点:
(1) (2)
(4)
TN
9.55
PN nN
3T Tst ,n 0, S 1
此时电机端电压为电源电压减去定子外串电阻和电抗上的压降。
(3)改变定子电源频率时的人为特性
n0
60 f p
n0 f Sm 1/ f
Sm
R2 X 20
n0 nm n0
Tm a x
K
U2 2 X 20
Tst 1/ f Tmax不变
Tst
K
R2U 2
R22
X
2 20
Tm a x
TN
注意: 调速时保持U / f 常数
过闸刀开关或接触器直接接入电源,在额 定电压下进行启动。
• 特点:电动机定子绕组的工作电压和 启动电压相等。
• 对象:小容量电动机。
2.电阻或电抗器降压启动
特点:
启动转矩随定子电压的平方下降,故它只适用于空载或轻载启动的场合; 不经济,在启动过程中,电阻器上消耗能量大,不适用于经常启动的电动机, 若采用电抗器代替电阻器,则所需设备费较贵,且体积大。
电工学第三章三相交流电ppt课件
结论:电源 Y形联结时, 线电压Ul 3UP, 且超 前相应的相电压 30 , 三相线电压也是对称的 。
6
3.1.2 三相电路中负载的联结方法
1. 三相负载
分类
三相负载:需三相电源同时供电
负载
三相电动机等
单相负载:只需一相电源供电
照明负载、家用电器
对称三相负载:ZA=ZB= ZC
三相负载
如三相电动机
此时负载中性点N´即为 A, 因此负载各相电压为 N
UA 0 , UA 0
B
UB UB A, UB 380 V UC UC A , UC 380 V C
+
U A
iA
iC
– –
N´
–
iB
+ U C U B +
此情况下,B相和C相的电灯组由于承受电压上所加 的电压都超过额定电压(220V) ,这是不允许的。
(2) 相UA电B=流UBC=UIIICABCABCA=UUUUZZZClCAABB=AABBCCUP
A
+–
U AB
– U CA
B U+ BC C–
+
IB IC
ICA
ZCA
IAB
ZBC ZAB
IBC
相电流: 线电流:
IIAA、B、IIB、BC、IC ICA
线电流不等于相电流
20
(3) 线电流
IA IAB ICA
16
(2) A相断路
A
1) 中性线未断
B、C相灯仍承受220V N
电压, 正常工作。
2) 中性线断开
B
变为单相电路,如图(b) C 所示, 由图可求得
I UBC 380 12 .7 A RB RC 10 20
6
3.1.2 三相电路中负载的联结方法
1. 三相负载
分类
三相负载:需三相电源同时供电
负载
三相电动机等
单相负载:只需一相电源供电
照明负载、家用电器
对称三相负载:ZA=ZB= ZC
三相负载
如三相电动机
此时负载中性点N´即为 A, 因此负载各相电压为 N
UA 0 , UA 0
B
UB UB A, UB 380 V UC UC A , UC 380 V C
+
U A
iA
iC
– –
N´
–
iB
+ U C U B +
此情况下,B相和C相的电灯组由于承受电压上所加 的电压都超过额定电压(220V) ,这是不允许的。
(2) 相UA电B=流UBC=UIIICABCABCA=UUUUZZZClCAABB=AABBCCUP
A
+–
U AB
– U CA
B U+ BC C–
+
IB IC
ICA
ZCA
IAB
ZBC ZAB
IBC
相电流: 线电流:
IIAA、B、IIB、BC、IC ICA
线电流不等于相电流
20
(3) 线电流
IA IAB ICA
16
(2) A相断路
A
1) 中性线未断
B、C相灯仍承受220V N
电压, 正常工作。
2) 中性线断开
B
变为单相电路,如图(b) C 所示, 由图可求得
I UBC 380 12 .7 A RB RC 10 20
三相异步、交流电动机的原理(ppt 76页)_9330

通常把定子三相绕组的六根出线头都引出, 来自据实际使用的需要,Y形接法
△形接法
可接成Y形或△形, 三相异步电动机的引出线
如图所示。
11
第2章 交流电动机
机 电
传
2-1 三相异步电动机的基本结构与工作原理
动 控
制
一. 三相异步电动机的基本结构
鼠笼型转子绕组
12
第2章 交流电动机
机 电
传
2-1 三相异步电动机的基本结构与工作原理
交流电动机的优缺点:
结构简单,制造、使用和维护方便,
运行可靠,成本低,效率高。
但是,功率因数低、起动和调速性能差。
5
第2章 交流电动机
机 电
传
概述
三相异步电动机的额定值
动 控
制
额定电 UN(压 kV 或 V)
额定运行状态时加在 定子绕组上的线电压.
额定功PN率 (kW)
额定条件下转轴上 输出的机械功率.
额定电I流 N(A)
额定 额定转 nN(r速 /min)
运行时电动机的转速 在额定运行状态下流
入定子绕组的线电流. 额定值的关系:
P N3U N IN coNs η N
额 额 额定 定 定效 频 功f率 率 率 NN 因co数 sN
6
第2章 交流电动机
机 电
传
2-1 三相异步电动机的基本结构与工作原理
的结构特点、工作原理、运行特性及启动方法。
2
第2章 交流电动机
机 电
传
动
重点
控 制
异步电动机的机械特性,它是基于异步电动机的工作原理 而推导出来的;特别是异步电动机的人为机械特性,因为 它是分析异步电动机启动、调速、制动工作状态的依据; 对异步电动机铭牌数据、额定值的含义要非常熟悉; 异步电动机直接启动和Y-△降压启动的条件和优缺点, 线绕式异步电动机转子串电阻的启动、调速和制动, 以及各种启动方法的应用场合; 异步电动机变频调速和变极对数调速的特性与优缺点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
形成的磁场则是 两对磁极。 即 p=2
3
U4
U2
V3
W1
W2 U3
V2
四极旋转磁场
上一节
下一节
上一页
7 下一页
第6章 电 动 机
ppt课件 返回
上一节
下一节
上一页
8 下一页
第6章 电 动 机
p = 1 时: 电流变化一周
→ 旋转磁场转一圈
电流每秒钟变化 50 周 → 旋转磁场转 50 圈
解:根据异步电动机转子转速与旋转磁场同步转 速的关系可知:n0=1000 r/min , 即 p=3 额定转差率为
S N =n 0n 0 n N 1% 0= 0 11 0 0 9 00 7 0 10 50= 0 2% .5
转子转速亦可由转差率求得
ppt课件
返回
上一节
n=(1s)n0
16
下一节
临界状态和起动状态的意义;
6. 了解定子电压和转子电阻改变时的人为机械特性;
7. 理解三相异步电动机的铭牌数据的意义;
9. 掌握三相异步电动机的起动方法;
10. 掌握三相异步电动机的调速方法;
11. 了解单相异步电动机的工作原理和起动方法;
12. 了解三相异步电动机一相或一线断路后的后果。
ppt课件
i1→U1, i2→W1, i3→V1
U1
V2
W2
W1
V1
U2
旋转磁场是沿着: U1
W1
V1
◆ 与三相绕组中的三相电流的相序:L1 → L2 → L3
一致,通入导前电流的绕组→通入滞后电流的绕组。
任意对调两根电源进线,磁场反转。
ppt课件
12
返回
上一节
下一节
上一页
下一页
第6章 电 动 机
(二)工作原理
上一页
下一页
第6章 电 动 机
▲ 转子电路频率的变化:
第6章 电 动 机
6.2 三相异步电动机的工作原理
电机是利用电与磁的相互转化和相互作用制成的。 旋转磁场是三相异步电动机工作的基础。
(一)旋转磁场
(1)旋转磁场的产生 旋转磁场由三相电流通过三相对称绕组产生。 对称: 三相对称负载 空间对称分布
ppt课件 返回
上一节
下一节
上一页
4 下一页
第6章 电 动 机
2
返回
上一页 下一页
第6章 电 动 机
6.1 电机概述
电机:实现能量转换或信号转换的电磁装置
(动力电机)(控制电机)
发电机 ——将机械能转换为电能;
电动机 ——将电能转换为机械能。
▲直流电动机
▲单相
▲交流电动机 ▲同步电动机 ▲三相
▲异步电动机 ▲单相
▲三相 ▲鼠笼型 ▲绕线型
ppt课件
3
返回
上一页 下一页
二极旋转磁场
ppt课件 返回
上一节
下一节
上一页
5 下一页
第6章 电 动 机
(2)旋转磁场的转速
旋转磁场转速 n0 — 同步转速 如何改变旋转磁场的转速?
▲ 极对数(p)的概念:
以 Y 型接法为例,当每相 绕组只有一个线圈时,按右图 放入定子槽内,合成的旋转磁 场只有一对磁极,则极对数为 1。 即 p = 1
n0
=
60 f1
p
( r / min)
f 1= 50 Hz 时,不同极对数时的同步转速如下:
同步转速
p
1
2
3
4
5
6
n0/(r/min) 3000 1500 1000 750 600 500
ppt课件 返回
上一节
下一节
上一页
10 下一页
第6章 电 动 机
(3)旋转磁场的转向
旋转方向:取决于三相电流的相序。
s = n0 n n0
n = 0, s = 1
0﹤s ≤ 1
额定运行时:
s = 0.01 ~ 0.09
ppt课件 返回
上一节
下一节
上一页
15 下一页
第6章 电 动 机
转差率 :
s = n0 n n0
例:一台三相异步电动机,其额定转速
nN =975 r/min,电源频率 f1=50 Hz。试求电动机的 极对数和额定负载下的转差率。
Im
i1 i2 i3
O
t
i1→U1, i2→V1, i3→W1 旋转磁场是沿着:
L1 i1
U1
W2 U2
V2
L2 i3 W1
L3 i2
U1
V1
V2
W2
U1
V1
W1
W1
V1
ppt课件 返回
上一节
下一节
U2
上一页
11 下一页
第6章 电 动 机
L1 i1
U1
L2 i2 W1 L3 i3
W2 U2 V2
V1
电流每分钟变化 (50×60) 周→ 旋转磁场转 3000 圈
p = 2 时:
电流变化一周
→
电流每秒钟变化 50 周 →
电流每分钟变化 (25×60) 周→
旋转磁场转半圈 旋转磁场转 25 圈 旋转磁场转 1500 圈
ppt课件 返回
上一节
下一节
上一页
9 下一页
第6章 电 动 机
p 为任意值时:
三相异步电动机的同步转速
第6章 电 动 机
第6章 电 动 机
6.1 电机概述 6.2 三相异步电动机的工作原理 6.3 三相异步电动机的基本结构 6.4 三相异步电动机的铭牌数据 6.5 三相异步电动机的机械特性 6.6 三相异步电动机的起动 6.7 三相异步电动机的调速 6.8 单相异步电动机
ppt课件
返回主页
教学基本要求
▲ 用左手定则判断转 子绕组受到的电磁力 的方向
电磁力→电磁转矩 T
T 与 n0 同方向。
N
S
工作原理示意图
ppt课件 返回
上一节
下一节
上一页
14 下一页
第6章 电 动 机
▲电动机转速 n 和旋转磁场同步转速 n0的关系:
电机转子转动方向与磁场旋转的方向一致,
但 n < n0
转差率 :
起动时:
称异步电动机或感应电动机
i1
U1
i3 W1 i2
W2 U2 V2
V1
U1
V2
W2
W1
V1
U2
ppt课件 返回
上一节
下一节
上一页
6 下一页
第6章 电 动 机
以 Y 型接法为例,将 每相绕组都改用两个线圈 串联组成。
i1
U1
U3 U2
U4 V4
i3
W2
W4 W3
W1
V3 V2
V1
i2
三相绕组
ppt课件 返回
按下图放入定子 槽内。
对称三相绕组 通入对称三相电流
三相交流电能
旋转磁场 (磁场能量)
转子绕组在磁场中 受到电磁力的作用
转子绕组中 产生 e 和 i
磁场切割 转子绕组
转子旋转起来
输出机械能量
机械负载 旋转起来
ppt课件
返回
上一节
下一节
13
上一页
下一页
第6章 电 动 机
(1)电磁转矩的产生
▲ 用右手定则判断转 子绕组中感应电流的 方向
分析与思考
1 练习题
第6章 电 动 机
教学基本要求
1. 了解三相异步电动机的结构,分清笼式和绕线式两种
转子的结构特点;
2. 理解旋转磁场和三相异步电动机的工作原理;
3. 掌握三相异步电动机改变转子转向的方法;
4. 理解三相异步电动机的转矩平衡关系和功率平衡关系;
5. 理解三相异步电动机的固有机械特性以及额定状态、
3
U4
U2
V3
W1
W2 U3
V2
四极旋转磁场
上一节
下一节
上一页
7 下一页
第6章 电 动 机
ppt课件 返回
上一节
下一节
上一页
8 下一页
第6章 电 动 机
p = 1 时: 电流变化一周
→ 旋转磁场转一圈
电流每秒钟变化 50 周 → 旋转磁场转 50 圈
解:根据异步电动机转子转速与旋转磁场同步转 速的关系可知:n0=1000 r/min , 即 p=3 额定转差率为
S N =n 0n 0 n N 1% 0= 0 11 0 0 9 00 7 0 10 50= 0 2% .5
转子转速亦可由转差率求得
ppt课件
返回
上一节
n=(1s)n0
16
下一节
临界状态和起动状态的意义;
6. 了解定子电压和转子电阻改变时的人为机械特性;
7. 理解三相异步电动机的铭牌数据的意义;
9. 掌握三相异步电动机的起动方法;
10. 掌握三相异步电动机的调速方法;
11. 了解单相异步电动机的工作原理和起动方法;
12. 了解三相异步电动机一相或一线断路后的后果。
ppt课件
i1→U1, i2→W1, i3→V1
U1
V2
W2
W1
V1
U2
旋转磁场是沿着: U1
W1
V1
◆ 与三相绕组中的三相电流的相序:L1 → L2 → L3
一致,通入导前电流的绕组→通入滞后电流的绕组。
任意对调两根电源进线,磁场反转。
ppt课件
12
返回
上一节
下一节
上一页
下一页
第6章 电 动 机
(二)工作原理
上一页
下一页
第6章 电 动 机
▲ 转子电路频率的变化:
第6章 电 动 机
6.2 三相异步电动机的工作原理
电机是利用电与磁的相互转化和相互作用制成的。 旋转磁场是三相异步电动机工作的基础。
(一)旋转磁场
(1)旋转磁场的产生 旋转磁场由三相电流通过三相对称绕组产生。 对称: 三相对称负载 空间对称分布
ppt课件 返回
上一节
下一节
上一页
4 下一页
第6章 电 动 机
2
返回
上一页 下一页
第6章 电 动 机
6.1 电机概述
电机:实现能量转换或信号转换的电磁装置
(动力电机)(控制电机)
发电机 ——将机械能转换为电能;
电动机 ——将电能转换为机械能。
▲直流电动机
▲单相
▲交流电动机 ▲同步电动机 ▲三相
▲异步电动机 ▲单相
▲三相 ▲鼠笼型 ▲绕线型
ppt课件
3
返回
上一页 下一页
二极旋转磁场
ppt课件 返回
上一节
下一节
上一页
5 下一页
第6章 电 动 机
(2)旋转磁场的转速
旋转磁场转速 n0 — 同步转速 如何改变旋转磁场的转速?
▲ 极对数(p)的概念:
以 Y 型接法为例,当每相 绕组只有一个线圈时,按右图 放入定子槽内,合成的旋转磁 场只有一对磁极,则极对数为 1。 即 p = 1
n0
=
60 f1
p
( r / min)
f 1= 50 Hz 时,不同极对数时的同步转速如下:
同步转速
p
1
2
3
4
5
6
n0/(r/min) 3000 1500 1000 750 600 500
ppt课件 返回
上一节
下一节
上一页
10 下一页
第6章 电 动 机
(3)旋转磁场的转向
旋转方向:取决于三相电流的相序。
s = n0 n n0
n = 0, s = 1
0﹤s ≤ 1
额定运行时:
s = 0.01 ~ 0.09
ppt课件 返回
上一节
下一节
上一页
15 下一页
第6章 电 动 机
转差率 :
s = n0 n n0
例:一台三相异步电动机,其额定转速
nN =975 r/min,电源频率 f1=50 Hz。试求电动机的 极对数和额定负载下的转差率。
Im
i1 i2 i3
O
t
i1→U1, i2→V1, i3→W1 旋转磁场是沿着:
L1 i1
U1
W2 U2
V2
L2 i3 W1
L3 i2
U1
V1
V2
W2
U1
V1
W1
W1
V1
ppt课件 返回
上一节
下一节
U2
上一页
11 下一页
第6章 电 动 机
L1 i1
U1
L2 i2 W1 L3 i3
W2 U2 V2
V1
电流每分钟变化 (50×60) 周→ 旋转磁场转 3000 圈
p = 2 时:
电流变化一周
→
电流每秒钟变化 50 周 →
电流每分钟变化 (25×60) 周→
旋转磁场转半圈 旋转磁场转 25 圈 旋转磁场转 1500 圈
ppt课件 返回
上一节
下一节
上一页
9 下一页
第6章 电 动 机
p 为任意值时:
三相异步电动机的同步转速
第6章 电 动 机
第6章 电 动 机
6.1 电机概述 6.2 三相异步电动机的工作原理 6.3 三相异步电动机的基本结构 6.4 三相异步电动机的铭牌数据 6.5 三相异步电动机的机械特性 6.6 三相异步电动机的起动 6.7 三相异步电动机的调速 6.8 单相异步电动机
ppt课件
返回主页
教学基本要求
▲ 用左手定则判断转 子绕组受到的电磁力 的方向
电磁力→电磁转矩 T
T 与 n0 同方向。
N
S
工作原理示意图
ppt课件 返回
上一节
下一节
上一页
14 下一页
第6章 电 动 机
▲电动机转速 n 和旋转磁场同步转速 n0的关系:
电机转子转动方向与磁场旋转的方向一致,
但 n < n0
转差率 :
起动时:
称异步电动机或感应电动机
i1
U1
i3 W1 i2
W2 U2 V2
V1
U1
V2
W2
W1
V1
U2
ppt课件 返回
上一节
下一节
上一页
6 下一页
第6章 电 动 机
以 Y 型接法为例,将 每相绕组都改用两个线圈 串联组成。
i1
U1
U3 U2
U4 V4
i3
W2
W4 W3
W1
V3 V2
V1
i2
三相绕组
ppt课件 返回
按下图放入定子 槽内。
对称三相绕组 通入对称三相电流
三相交流电能
旋转磁场 (磁场能量)
转子绕组在磁场中 受到电磁力的作用
转子绕组中 产生 e 和 i
磁场切割 转子绕组
转子旋转起来
输出机械能量
机械负载 旋转起来
ppt课件
返回
上一节
下一节
13
上一页
下一页
第6章 电 动 机
(1)电磁转矩的产生
▲ 用右手定则判断转 子绕组中感应电流的 方向
分析与思考
1 练习题
第6章 电 动 机
教学基本要求
1. 了解三相异步电动机的结构,分清笼式和绕线式两种
转子的结构特点;
2. 理解旋转磁场和三相异步电动机的工作原理;
3. 掌握三相异步电动机改变转子转向的方法;
4. 理解三相异步电动机的转矩平衡关系和功率平衡关系;
5. 理解三相异步电动机的固有机械特性以及额定状态、