导航路径设置步骤
ROS路径规划基础教程

ROS路径规划基础教程ROS(Robot Operating System)是一个机器人开发平台,提供了一套丰富的库、工具和功能,以帮助开发者构建灵活的机器人应用程序。
路径规划是机器人导航过程中的核心问题之一,它涉及到如何通过已知的地图信息和传感器数据,找到机器人从当前位置到目标位置的最佳路径。
在ROS中,路径规划一般是通过导航栈(navigation stack)来实现的。
导航栈包含了多个节点,每个节点都负责不同的功能。
其中,路径规划节点是实现路径规划的核心节点。
路径规划的基础概念包括地图、起点、终点、障碍物等。
地图是机器人运行环境的描述,一般以二维或三维的栅格地图形式存在。
起点和终点是机器人的位置信息,可以通过定位节点(如AMCL)获取。
障碍物是机器人在路径规划过程中需要避开的物体,可以通过传感器节点(如激光雷达)获取。
路径规划的过程一般分为离线建图和在线规划两个阶段。
离线建图是指在实际操作前,先使用探测设备(如激光雷达)扫描环境,生成地图数据。
在线规划是指在导航过程中,根据机器人当前位置、目标位置和地图信息,实时计算出最佳路径。
在ROS中,常用的路径规划算法包括A*、Dijkstra、RRT等。
这些算法都可以通过调用ROS的路径规划库进行实现。
例如,ROS中的move_base节点提供了基于A*算法的全局路径规划功能,可以从起点到终点找到一条可行的路径。
另外,ROS还提供了一些局部路径规划算法,如DWA(Local Dynamic Window Approach)、TEB(Trajectory Rollout Approach)等,用于在机器人运行过程中避开障碍物。
在使用ROS进行路径规划时,一般需要完成以下几个步骤:1. 构建地图:使用探测设备(如激光雷达)扫描环境,生成地图数据。
可以使用gmapping或cartographer等SLAM算法进行地图构建。
2.设置起点和终点:通过定位节点获取机器人当前位置信息,并设置目标位置。
驴友必备教程—出行GPS轨迹全程记录(可直接显示在Google earth上)
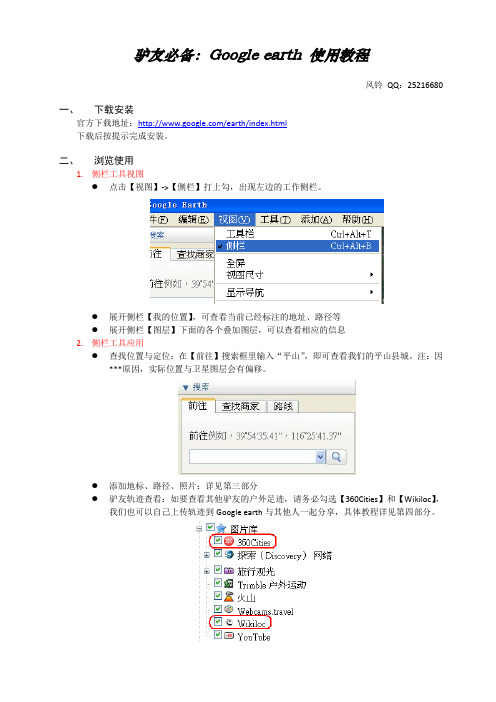
驴友必备:Google earth 使用教程风铃QQ:25216680一、下载安装官方下载地址:/earth/index.html下载后按提示完成安装。
二、浏览使用1.侧栏工具视图●点击【视图】->【侧栏】打上勾,出现左边的工作侧栏。
●展开侧栏【我的位置】,可查看当前已经标注的地址、路径等●展开侧栏【图层】下面的各个叠加图层,可以查看相应的信息2.侧栏工具应用●查找位置与定位:在【前往】搜索框里输入“平山”,即可查看我们的平山县城。
注:因***原因,实际位置与卫星图层会有偏移。
●添加地标、路径、照片:详见第三部分●驴友轨迹查看:如要查看其他驴友的户外足迹,请务必勾选【360Cities】和【Wikiloc】,我们也可以自己上传轨迹到Google earth与其他人一起分享,具体教程详见第四部分。
3.放大/缩小地图●双击鼠标,或向前滚动鼠标滚轮,即可放大地图●先后滚动鼠标滚轮,即可缩小地图4.旋转地图●画面出现整个地球时,直接点击球体边缘拖曳即可旋转地球●画面没有星空,只出现地图的一部分时,点住Ctrl键不动,同时旋转滚轮,即可旋转地图。
5.查看地势/3D视图、全景浏览●3D视图:按住Shift键不动,向前滚动鼠标滚轮,即可展现地图显示区域的3D视图,如果是山体,可以很明显的看出山体的地势落差;向后滚动鼠标滚轮,则逐渐还原为平面视图。
或者按住Shift键不动,同时点击鼠标左键向前或向后也可形成3D视图,用鼠标左键的好处是可以同时旋转地图,查看周边区域的地势情况。
“飞鹅岭公园3D视图”●前景浏览:按住Ctrl键不动,同时点击鼠标左键则可展示当前位置周边区域的鸟瞰图,6.还原地图方位●经过旋转、3D视图、全景视图等操作之后,地图形态各异,不便于地图其他区域的操作●还原地图至正北:点击地图右侧导航工具中带眼睛圆圈的“N”,可将地图还原至正北●还原地图至2D视图:按住Shift键/或Ctrl键,同时点击鼠标左键向正上方滑动,直到地图放平为止。
ROS路径规划基础教程

ROS路径规划基础教程ROS(Robotic Operating System)是一个用于构建机器人系统的开源框架。
路径规划是机器人导航中非常重要的一部分,它在机器人移动时帮助机器人选择最优路径以避开障碍物。
本篇文章将介绍ROS中的路径规划基础知识,包括使用ROS Navigation Stack进行路径规划的整个过程。
首先,我们需要了解ROS Navigation Stack的基本概念和组成部分。
ROS Navigation Stack是ROS中最常用的路径规划和导航的软件包之一,它由多个节点组成,包括地图服务器、定位模块、路径规划器和控制器等。
在使用ROS Navigation Stack进行路径规划之前,我们需要准备一个地图。
地图可以通过ROS中的gmapping等SLAM算法生成,也可以是预先制作好的静态地图。
地图是机器人导航过程中的参考依据,通过地图,机器人可以感知环境并规划路径。
接下来,我们需要配置机器人的定位系统。
机器人的定位系统可以是激光雷达、惯性导航系统或者视觉系统等。
定位系统可以提供机器人在地图中的位置信息,从而在路径规划过程中确定机器人的起点和终点。
一旦地图和定位系统准备好了,我们可以开始进行路径规划了。
首先,我们需要使用ROS提供的参数服务器来设置一些路径规划相关的参数,例如机器人的尺寸、速度限制等。
然后,我们需要启动路径规划器节点,该节点会订阅地图和定位信息,并根据这些信息生成路径。
生成路径之后,我们还需要进行路径的优化和平滑处理。
ROS Navigation Stack提供了一些路径优化算法,例如DFP(Dynamic Window Approach+Force Porjection)算法、A*算法等。
这些算法可以将生成的路径进行进一步优化,以提高路径的可行性和平滑度。
路径规划完成后,我们还需要将生成的路径发送给机器人的控制器节点,控制器节点会根据路径信息调整机器人的姿态以及速度,使机器人按照规划好的路径进行移动。
e路航升级1

地图升级方法说明下载网站用户名:elhgps密码:hc123456这是公共账号,请不要改动密码!1.进去后在公共更新里面下载文件根据需要下载相应的地图!以城际通为例,进城际通目录可以看到高清和普屏两个目录选择合适的地图下载!如果需要下载普屏地图,双击进入,看到如下目录:右键下载选择合适的工具下载即可!!2.下载完后要把压缩文件解压到电脑上,解压,凯立德地图的文件夹名称是NaviOne,城际通地图的文件夹名称是Navi,道道通的地图文件夹名称是RTNavi。
(如果有几个压缩包的,可以尝试只解压第一个,如果不行再全部解压)。
然后把解压的地图文件夹复制到导航仪盘符里,复制前可把原来的地图文件夹删掉,注:只能删地图文件夹,其它不可删。
第一次地图升级建议把导航仪的所有文件都备份一份到自己的电脑上,(在把导航仪和电脑用数据线连接前要先设置一下导航仪的USB设置)USB设置步方式(MS ACTIVESYNC)。
设置后都要保存,导航将会重启。
U盘方式(MASS STORAGE):选择这种方式用数据线直接连接电脑后导航会出现如下界面,此时链接已经完成,可以在导航和电脑进行数据传输。
同步方式(MS ACTIVESYNC):此种链接方式需要在电脑上装一个同步软件,ActiveSyncsetupchs,可以去下载。
安装后在电脑上会有图标,链接后进入移动设备可以看到在ResidentFlash里面可以进行数据传输。
进入导航wince系统有IE在个菜单就可以进行联网操作(注:某些版本没有)。
3.复制完后,要设置一下导航仪的导航路径。
导航路径导航路径选择,每次导航前必须设置路径,指向相应的程序,点击导航图标时才可以运行地图程序或者引导程序。
点击导航路径设置图标后进入如下界面:勾选此项,每次开机的时候都会自动运行相应的地图程序或者引导程序。
路径显示框,设置好的路径在此显示。
浏览按钮,点击此图标可以选择相应的地图程序或者引导程序。
智能车载导航与路径规划系统设计与实现

智能车载导航与路径规划系统设计与实现智能车载导航与路径规划系统是一种基于人工智能技术的创新应用,它能够帮助驾驶员快速准确的找到目的地,并通过智能路径规划功能提供最优的行驶路线。
本文将探讨智能车载导航与路径规划系统的设计和实现。
一、需求分析智能车载导航与路径规划系统的设计首先需要进行需求分析,以确定系统的功能和性能需求。
主要的需求包括:1. 实时定位和地图显示:系统应能够实时获取车辆的位置信息,并在电子地图上显示出来。
2. 导航功能:根据用户输入的目的地信息,系统应该能够给出最佳路线,并提供语音导航提示。
3. 增强现实导航:系统可以通过摄像头获取道路环境信息,并通过AR技术将导航信息实时叠加在驾驶员的视野中。
4. 动态路径规划:系统能够根据实时的交通状况调整行驶路线,并提供可选择的备选路线。
5. 长途导航和路径规划:系统应支持长途导航和路径规划,能够根据用户的需求,规划出多个途径点的行驶路线。
6. 可操作性和易用性:系统应具备友好的人机交互界面,方便驾驶员进行操作。
二、系统架构设计基于以上需求分析,我们可将智能车载导航与路径规划系统分为四个模块,分别为定位和地图显示模块、导航模块、增强现实导航模块和路径规划模块。
1. 定位和地图显示模块:该模块负责获取车辆的实时位置信息,并将位置信息显示在电子地图上。
它包括GPS模块、地图接口模块和位置信息显示模块。
2. 导航模块:该模块是系统的核心,根据用户输入的目的地信息和定位模块提供的位置信息,计算出最佳的行驶路线,并提供语音导航提示。
它包括目的地输入模块、路线计算模块、语音导航模块和导航信息显示模块。
3. 增强现实导航模块:该模块通过摄像头获取道路环境信息,并通过AR技术将导航信息叠加在驾驶员的视野中,提供增强现实的导航功能。
它包括摄像头模块、图像处理模块和增强现实导航显示模块。
4. 路径规划模块:该模块负责根据实时的交通状况和用户的需求,进行动态路径规划,并提供备选的行驶路线。
iOS 导航SDK开发指南路径规划

iOS 导航SDK 开发指南路径规划根据出发地、目的地以及路径策略设置,为用户量身设计出行方案。
同时可结合实时交通,帮助用户绕开拥堵路段,提供更贴心、更人性化的驾车出行体验。
注意:路径规划功能需要联网使用,由此产生的流量费用由运营商收取。
AMapNaviManager 是导航管理类,提供计算规划路径、开启导航等相关方法。
<AMapNaviManagerDelegate>是导航管理协议类,提供导航过程中的回调接口(如:路径规划成功/失败的回调、拥堵重新算路回调等)。
因此,在进行路径规划之前,有以下几个步骤:1.继承<AMapNaviManagerDelegate>协议,并声明AMapNaviManager 对象。
示例代码如下:?12 3@interface RoutePlanViewController ()<AMapNaviManagerDelegate>@property (nonatomic, strong) AMapNaviManager *naviManager; 2.初始化导航管理对象。
示例代码如下:?12345678- (void)initNaviManager { if (_naviManager == nil) { _naviManager = [[AMapNaviManager alloc] init]; [_naviManager setDelegate:self]; } } 3.路径规划,即根据参数进行导航路径的计算。
高德地图iOS 导航SDK 提供两种方式的路径规划——驾车和步行。
对于驾车路径规划AMapNaviManager 中提供两种计算驾车路径的方法,分别为:∙不带起点(以当前位置为起点) calculateDriveRouteWithEndPoints:wayPoints:drivingStrategy: ∙ 带起点calculateDriveRouteWithStartPoints:endPoints:wayPoints:drivingStrategy:驾车路径计算时,可设置3个途经点。
路径规划算法

路径规划算法路径规划算法是指在给定的地图上,找到从起点到终点的最优路径的一种方法。
现实生活中,路径规划算法被广泛应用于导航系统、物流管理、机器人导航等领域。
最常用的路径规划算法是A*算法。
A*算法是一种启发式搜索算法,通过估计起点到终点的最短距离来选择下一个搜索节点。
具体步骤如下:1. 初始化起点,将其作为待搜索的节点。
2. 选择以启发式函数估计距离最小的节点作为当前搜索节点。
3. 如果当前节点是终点,则搜索结束,找到了最优路径。
4. 否则,计算当前节点的邻居节点,计算它们到起点的距离,并估计到终点的距离,更新节点状态。
5. 对于每个邻居节点,计算它们的启发式函数估计值,选择其中最小的节点作为下一个搜索节点,返回步骤2。
A*算法的优点是可以找到最优路径,并且可以通过调整启发式函数来适应不同的问题。
然而,它的缺点是需要遍历大量的节点,时间复杂度较高。
另一个常用的路径规划算法是Dijkstra算法。
Dijkstra算法是一种单源最短路径算法,通过维护起点到每个节点的距离来选择下一个搜索节点。
具体步骤如下:1. 初始化起点,将其距离设置为0,并将其加入待搜索节点集合。
2. 选择待搜索节点集合中距离最小的节点作为当前节点。
3. 如果当前节点是终点,则搜索结束,找到了最优路径。
4. 否则,计算当前节点的邻居节点,计算它们到起点的距离,更新节点状态。
5. 对于每个邻居节点,如果它不在待搜索节点集合中,则将其加入待搜索节点集合,返回步骤2。
Dijkstra算法的优点是简单易实现,并且能够找到最短路径。
缺点是时间复杂度较高,需要遍历大量节点。
除了A*算法和Dijkstra算法,还有其他一些常用的路径规划算法,如Bellman-Ford算法、Floyd-Warshall算法等。
不同的算法适用于不同的问题场景,选择合适的路径规划算法可以提高路径规划的效率和准确性。
使用测绘技术进行飞行器路径规划和航空器导航的步骤
使用测绘技术进行飞行器路径规划和航空器导航的步骤引言:飞行器在空中巡航需要精确的路径规划和导航技术,以确保航班的安全和效率。
测绘技术在航空领域中起着关键作用,它以精确的地理数据为基础,为飞行器的路径规划和导航提供强大支持。
本文将介绍使用测绘技术进行飞行器路径规划和航空器导航的步骤,包括数字地图制作、路径规划、航空器导航等。
一、数字地图制作数字地图是测绘技术的核心,在飞行器路径规划和航空器导航中扮演重要角色。
数字地图制作的步骤包括飞行器数据收集、遥感技术、地形测量和数据整合等。
首先,飞行器数据收集是通过卫星或无人机等设备获取高分辨率的地面影像和地形数据。
其次,遥感技术将卫星图像进行处理,提取出地物信息,如道路、建筑物、山脉等。
然后,地形测量使用地面测量设备获取地面高程数据,以构建数字地形模型。
最后,将收集到的数据进行整合,生成完整的数字地图。
二、路径规划路径规划是使用测绘技术进行飞行器导航的关键步骤。
路径规划的目标是找到一条最优路径,使飞行器能够以最快、最安全的方式从起点到终点。
路径规划算法通常基于数字地图上的地理信息,包括道路、地形高程和交通状况等。
在规划过程中,考虑到飞行器的特殊性,需要避开高楼大厦、山峰和其他障碍物,同时尽量减少航空器的油耗和飞行时间。
路径规划还可以结合实时数据,如天气状况和航班密度,以调整航路和避免拥堵。
三、航空器导航航空器导航是飞行器路径规划的实施过程。
航空器导航使用测绘技术提供的数字地图和路径规划算法,将飞行器引导到预定的航线上。
在导航过程中,飞行员需要使用导航仪表系统和地面导航设备,监控飞行器的位置和航向。
导航仪表系统将数字地图的数据与飞行器的位置信息结合起来,提供准确的导航指示,确保飞行器沿着规划的路径安全飞行。
此外,航空器导航还需要实时更新航线信息,以应对变化的天气和交通状况。
结论:使用测绘技术进行飞行器路径规划和航空器导航可以确保飞行的安全和效率。
通过数字地图制作、路径规划和航空器导航等步骤,飞行器可以准确地找到最优路径,并在巡航过程中得到有效的导航支持。