同步电机电磁部分计算
三相同步电机电磁计算公式

三相同步电机电磁计算公式当电流通过励磁线圈时,通过右手定则可以得到旋转磁场的磁通方向。
根据安培定理,磁通产生的磁场会导致转子上的导体感应出感应电动势,从而形成转子电流。
根据洛伦兹力定律,磁场和电流的相互作用会导致电磁力,从而实现电机的转动。
在推导电磁计算公式之前,我们需要先引入一些基本参数和符号:Ns:同步转速,单位为转/分钟f:电源频率,单位为赫兹p:极对数,即固定磁极数目的一半N:电机转速,单位为转/分钟s:滑差,定义为(Ns-N)/NsE:转子感应电动势,单位为伏特V:电机端电压,单位为伏特R:每相绕组电阻,单位为欧姆X:每相绕组电抗,单位为欧姆Z:每相绕组阻抗,单位为欧姆根据电压和电流的关系,可以得到以下公式:V=I*Z根据欧姆定律,可以得到以下公式:将上述两个公式联立,并代入感应电动势的表达式,可以得到:I*Z=I*R+E进一步展开化简,可以得到:I*(Z-R)=E如果我们假设转子电流小于感应电动势的电阻电压降,也就是I*X<<E,那么上述公式可以近似化简为:I*Z≈E根据电磁感应定律,可以得到以下公式:E=K*N*B*A其中,K是一个常数,B是磁场的密度,A是转子的面积。
假设电机的电磁转矩为Te,那么可以得到以下公式:Te=Kt*I*I其中,Kt是电磁转矩的比例常数。
Ns=(2*f)/ps=(Ns-N)/NsV=I*ZI*(Z-R)=EE=K*N*B*A通过以上公式,我们可以对三相同步电机的电磁性能进行精确的计算和分析。
这些公式提供了评估电机性能、设计电机参数和优化电机结构的工具。
对于不同的应用需求,可以根据具体情况进行合理选择和定制。
三相同步电机电磁计算公式教程
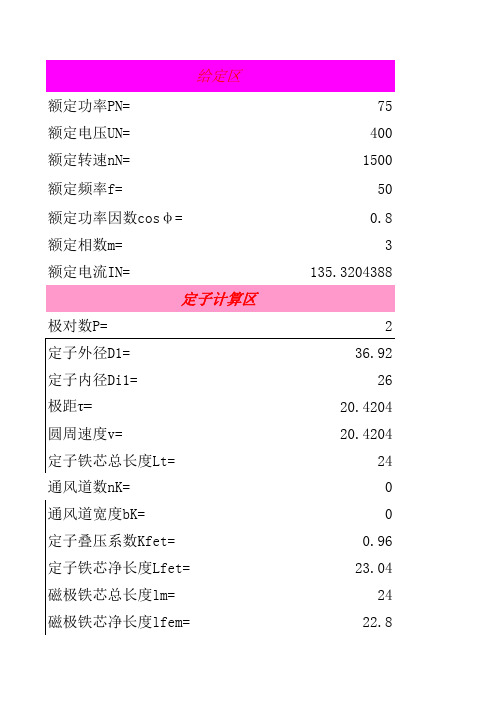
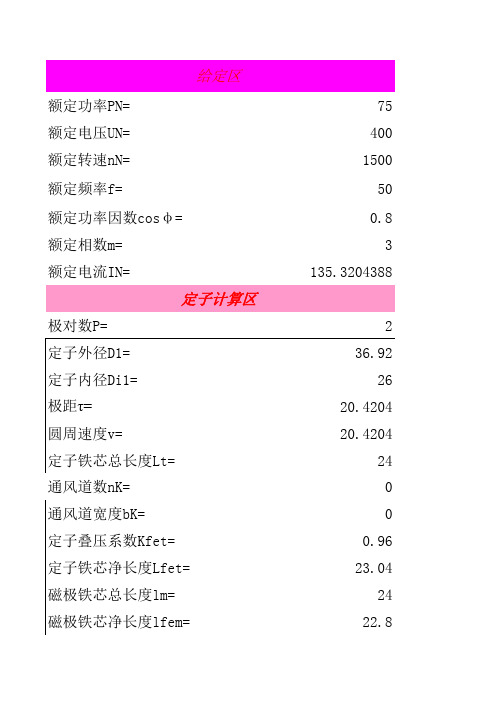
给定区额定功率PN=75额定电压UN=400额定转速nN=1500额定频率f=50额定功率因数cosφ=0.8额定相数m=3额定电流IN=135.3204388定子计算区极对数P=2通风道数nK=0通风道宽度bK=0定子叠压系数Kfet=0.96定子铁芯净长度Lfet=23.04磁极铁芯总长度lm=24磁极铁芯净长度lfem=22.8线负荷A=437.3640556发热参数Aj=3679.473134磁路计算(39)定子齿距ts= 1.7017 ts1= 1.734425 ts2= 1.930775 ts1/3= 1.778058333 (40)定子齿宽度bt1=0.834425 bt2=0.910775定子齿计算宽度bts=0.859875定子槽深hs= 2.26定子齿计算高度hts‘= 1.82定子轭高度hjs= 3.2定子轭计算高度hjs’= 3.37定子轭磁路长度ljs=13.175085极弧系数αp’=0.7(47)极靴宽度bp=13.42824128磁极偏心距H=0.33121825极靴圆弧半径Rp=12.56878175极靴边缘高度hp'=0.25 (51)极靴中心高度hp= 2.19358252初取漏磁系数σ‘= 1.048970637磁极宽度bm=7.668255488转子轭内径Dir=9转子轭外径Djr=14磁极中心高度hm= 3.70641748磁极侧高度hm‘= 3.768404852转子轭高度hjr= 2.5 (59)转子轭计算高度hjr‘=4转子轭磁路长度ljr= 3.927转子轭轴向长度lr=24.3磁极与轭间的残隙δ2=0.0088实际极弧系数=αp=0.693730948气隙比δm/δ= 1.5最小气隙比极距δ/τ=0.004897064 (66)基波磁场幅度系数α1= 1.1151三次谐波磁场幅度系数α3=0.00646758磁场分部系数fd=0.711265508磁场波形系数fb= 1.108747511直轴电枢反应磁场幅度系数Ad1=0.8532交轴电枢反应磁场幅度系数Aq1=0.33884电枢磁动势直轴折算系数Kad=0.765133172电枢磁动势交轴折算系数Kaq=0.303865124 (74)定子卡氏系数Kδ1= 1.113452078阻尼笼卡氏系数Kδ2= 1.030852295卡氏系数Kδ= 1.147804629(77)空载每极总磁通φ=0.025001113斜槽系数Ksk=0.997146644气隙磁密最大值Bδ=0.711292106定子视在磁密Bts‘= 1.478524606定子轭磁密Bjs= 1.609967011 (82)气隙磁压降Fδ=653.1394979定子齿磁压降Fts=10.738定子轭磁压降Fjs=82.2125304气隙,定子齿,轭磁压降之和Fδtj=746.0900283(86)计算漏磁几何尺寸Υ1=0.409973094Υ2=0.554905146 am= 3.100659528 ap= 3.206420626 hpm= 1.54572168(87)磁极压板厚d‘=0.6磁极压板宽b’=8.2磁极计算长度lm‘=25.2极靴漏磁导Λp= 6.89576E-07极身漏磁导Λm=8.91309E-07磁极漏磁导Λ= 1.58088E-06 (93)每极漏磁通φσ=0.001179482漏磁系数σ= 1.047177195磁极磁通φm=0.026180596磁极极身截面积Sm=184.6762251(97)极身磁密Bm= 1.417648411转子轭磁密Bjr= 1.346738462残隙处磁密Bσ2= 1.422563654极身磁压降Fm=58.56139619转子轭磁压降Fjr=67.5444残隙磁压降Fσ2=100.1484812空载每极磁压降Ffo=972.3443057稳态参数计算(104)定子线圈尺寸αc=0.685397076τy=20.5257745 lF=13.25667083 lE=8.391213665 lB30 (105)线圈半匝平均长度lca=56.51334166定子绕组相电阻(75。
三相同步电机电磁计算公式
150 31.91495584
空载励磁电流Ifo= (130)励磁绕组线规a*b= 励磁绕组导线截面积qf= (132)第n层线圈平均匝长度lfn= Qm
Wm
rm 第n层线圈n= lcf=
(134)Rf(75。)=
0.6479688 0.004138
3.19748665 0.36780445 0.04597556 0.40488548
(172)直流分量时间常数Ta= 控制励磁持续短路电流倍数fko= 额定励磁持续短路电流倍数fkN= 冲击短路电流倍数fy= (176)整步功率Pr=
9有效材料
定子绕组铜重Gcu1= 励磁绕组铜重Gcu2= 定子硅钢片Gfe=
6.482295371 5.325
9.11855881 91.5988 9.16 28 0.5 2 71.98
1.016634338 3.5
43.44247714 6.946167169
5 1061.609472 42.46437888 0.736361089 0.809997198 3.039066562 0.155765707
磁极铁芯净长度lfem=
75 400 1500 50 0.8
3 135.3204388
2 36.92
26 20.4204 20.4204
24 0 0 0.96 23.04 24 22.8
铁芯计算长度li
24.2
最小气隙δ=
0.1
最大气隙δm=
0.15
定子绕组
(20)每极每相槽数q=
4
定子槽数Z1=
0.03280029 0.33303111 1.63964654 7.47053142 147.946378
三相同步电机电磁计算公式(精)

定子轭高度hjs=3.2定子轭计算高度hjs’=3.37定子轭磁路长度ljs=13.175085极弧系数αp’=0.7 (47极靴宽度bp=13.42824128磁极偏心距H=0.33121825极靴圆弧半径Rp=12.56878175极靴边缘高度hp'=0.25 (51极靴中心高度hp=2.19358252初取漏磁系数ζ‘=1.048970637磁极宽度bm=7.668255488转子轭内径Dir=9转子轭外径Djr=14磁极中心高度hm=3.70641748磁极侧高度hm‘=3.768404852转子轭高度hjr=2.5 (59转子轭计算高度hjr‘=4转子轭磁路长度ljr=3.927转子轭轴向长度lr=24.3磁极与轭间的残隙δ2=0.0088实际极弧系数=αp=0.693730948
永磁同步电动机电磁计算程序
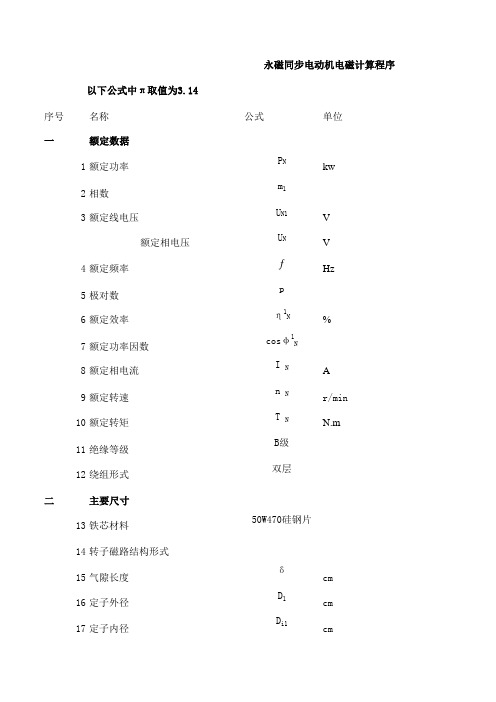
序号名称公式单位一额定数据1额定功率P Nkw2相数m13额定线电压U N1V 额定相电压U NV4额定频率ƒHz5极对数p6额定效率η1N%7额定功率因数cosφ1N8额定相电流I NA9额定转速n Nr/min10额定转矩T NN.m11绝缘等级B级12绕组形式双层二主要尺寸13铁芯材料50W470硅钢片14转子磁路结构形式15气隙长度δcm16定子外径D1cm17定子内径D i1cm永磁同步电动机电磁计算程序以下公式中π取值为3.1418转子外径D2cm19转子内径D i2cm20定、转子铁心长度l1=l2cm21铁心计算长度la=l1cm铁心有效长度l effcm铁心叠压系数K fe净铁心长l Fecm22定子槽数Q1 23定子每级槽数Q p1 24极距τp 25定子槽形梨形槽b s0cmh s0cmb s1cmh s1cmh s2cmrcm26每槽导体数N s1 27并联支路数a1 28每相绕组串联导体数NΦ129绕组线规N11S11mm230槽满率根据N11S11=1.54mm2,线径取d1/d1i=1.4mm/1.46mm,并绕根数N1(1)槽面积s scm2槽楔厚度hcm(2)槽绝缘占面积s icm2h1scm绝缘厚度C icm(3)槽有效面积s ecm2(4)槽满率sf% N1三永磁体计算31永磁材料类型铷铁棚32永磁体结构矩形33极弧系数a p34主要计算弧长b1pcm35主要极弧系数a1p 36永磁体Br温度系数a Br永磁体剩余磁通密度B r20T温度t℃t=80℃时剩余磁通密度B rT37永磁体矫顽力H c20KA/m永磁体H c温度系数a Hct=80℃时矫顽力Hc KA/m 38永磁体相对回复磁导率u ru0H/m39最高工作温度下退磁曲线的拐点b k40永磁体宽度b mcm41永磁体磁化方向厚度h Mcm42永磁体轴向长度l Mcm43提供每级磁通的截面积S M cm2四磁路计算44定子齿距t1cm45定子斜槽宽b skcm46斜槽系数K sk147节距y48绕组系数K dp1(1)分布系数K d1α°q1(2)短距系数K p1β49气隙磁密波形系数K f50气隙磁通波形系数KΦ51气隙系数Kδ52空载漏磁系数σ053永磁体空载工作点假设值b1m054空载主磁通Φδ0W b55气隙磁密Bδ056气隙磁压降δ12cm直轴磁路FδA交轴磁路Fδq 57定子齿磁路计算长度h1t1 58定子齿宽b t159定子齿磁密B t10T60定子齿磁压降F t1A查第2章附录图2E-3得H t10A/cm61定子轭计算高度h1j1cm62定子轭磁路计算长度l1j1cm63定子轭磁密B j10T64定子轭磁压降F j1cm查第2章附录图2C-4得C1查第2章附录图2E-3得H j10A/cm65磁路齿饱和系数K t66每对极总磁压降ΣF adAΣF aqA67气隙主磁导ΛδH68磁导基值ΛbH69主磁导标幺值λδ70外磁路总磁导λ1H71漏磁导标幺值λσ72永磁体空载工作点b m073气隙磁密基波幅值Bδ1T74空载反电动势E0V五参数计算75线圈平均半匝长l zl BcmdcmτycmsinαcosαC s76双层线圈端部轴向投影长f dcm77定子直流电阻R1ΩρΩ.mm2/mS1mm2d1mm78漏抗系数C x79定子槽比漏磁导λS1查第2章附录2A-3得K u1K L1λu1λL 1与假设值误差小于1%,不用重复计算80定子槽漏抗X s181定子谐波漏抗X d1Ω查第2章附录2A-4得ΣS82定子端部漏抗X e1Ω83定子斜槽漏抗X sk1Ω84定子漏抗X1Ω85直轴电枢磁动势折算系数K ad 86交轴电枢磁动势折算系数K aqK q87直轴电枢反应电流X adΩE dVI1dAF adA f1adb madΦδadW b88直轴同步电抗X dΩ89交轴磁化曲线(X aq-Iq)计算六工作性能计算90转矩角θ°91假定交轴电流I1q A92交轴电枢反应电抗X aqΩ见P428页表10-1 Xaq-Iq曲线93交轴同步电抗X qΩ94输入功率P1kwSINθSIN2θCOSθ95直轴电流I d A96交轴电流I q A97功率因数cosφ°ψ°φ°98定子电流I1A99负载气隙磁通ΦδW bEδV 100负载气隙磁密BδT 101负载定子齿磁密B t1T 102负载转子磁密B j2T 103铜耗P cu1W 104鉄耗(1)定子轭重量G j1kg(2)定子齿重量G t1kg(3)单位铁耗查第2章附录2E-4得p t1w/kgp j1w/kg(4)定子齿损耗P t1W(5)定子轭损耗P j1W(6)总损耗P Fe Wk1k2105杂耗P sP sN kw106机械损耗P fw w107总损耗ΣP kw108输出功率P2kw109效率η%110工作特性见P430表10-2111失步转矩倍数K MT max112永磁体额定负载工作点b mNf1adN113电负荷A1A/cmλ1n114电密J1A/mm2115热负荷A1J1(A/cm)(A/mm2)116永磁体最大去磁工作点b mhf1adhI adh Alaobusi算例4.00003.0000360.0000207.846096926.50003.00000.89601.00007.15960155253072.07547170.052314.814.74.8191919.10.9518.053667.7453333330.350.080.680.091.060.443213841.539699259 .4mm/1.46mm,并绕根数N1=11.0449520.20.1572481.150.030.887704 76.8400277610.82 6.4511733330.832911-0.121.22801.13216923-0.12856.544 1.0523700751.26E-063.61.219136.81.290888889 1.678155556 0.9808257135 0.932879761 0.965960169302 0.965753860.8333333331.2300402670.9406348791.2448267171.30.87 0.010365012 0.8411970220.02 1101.610936 833.7137955 1.2966666670.6405444441.793880386233.490 2.576666667 5.344105556 1.114305729 12.980832390.71.735 1.211871535 1347.991769 1080.094628 7.68922E-06 1.50683E-065.1029296776.63380858 1.5308789030.869003789 %,不用重复计算1.034706209201.529426831.682915872327.2568888890.5490852490.8357663494.3414579342.3838305111.7158936780.02171.53861.48.21E-010.9608659780.870.9050.403328710.6744.69E-016.28E-010.02051.65E-015.31E-011.63E+00 0.812981515 0.3251926060.4 6.558622511 193.4528014 1.231451467 158.2920937 0.011846361 0.858709257 0.0099496178.19E+0026.656.312.19根据I1q查表10-1得1.38E+014.44E+000.4483284510.8014937140.8938688943.25E+006.34E+000.9999593942.72E+01-5.17E-017.1248912060.010084516196.07567680.8184327131.7453347461.084150606261.317264623.264103534.2097075396.22.17 26.10018674 50.48310465 166.21667622.52 19.806546740.0227.9841 0.4753245883.97E+008.93E+010.18536125713.360.8611346311.04E-02 176.61978556.643 4.630762516 817.884282 0.4683161174.61E-014.79E+01。
同步电机的电磁转矩方程

同步电机的电磁转矩方程
同步电机的电磁转矩方程可以根据不同的模型和坐标系进行表示。
在三相静止坐标系下,同步电机的电磁转矩方程为:
(T_{e} = \frac{1}{2}p_n\psi_f(i_{a}\cos\theta + i_{b}\cos(\theta - \frac{2\pi}{3}) + i_{c}\cos(\theta + \frac{2\pi}{3})))
其中,(T_{e}) 是电机的电磁转矩,(p_n) 是电机的极对数,(\psi_f) 是电机的励磁磁链,(i_{a})、(i_{b}) 和(i_{c}) 分别是三相定子电流的实部和虚部,(\theta) 是电机的电角度。
在旋转坐标系下,同步电机的电磁转矩方程可以表示为:(T_{e} = K_m(\omega)(i_{d}\cos\theta + i_{q}\sin\theta))
其中,(K_m(\omega)) 是与电机转速(\omega)有关的常数,(i_{d}) 和 (i_{q}) 分别是定子电流在直轴和交轴分量,(\theta) 是电机的机械角度。
需要注意的是,在实际应用中,同步电机的电磁转矩方程需要根据具体的电机参数和运行情况进行计算和分析。
同时,还需要考虑电机控制策略和调速系统对电磁转矩的影响。
异步起动永磁同步电动机的电磁计算程序和算例
转子极距: τ2 πD2 , bp (τ2 b02) τ2 2p
67. 计算极弧系数: αi αp 0.889
, αp bp τ2
68. 气隙磁密波形系数: Kf
4 π
sin
αiπ 2
1.254
69, 气隙磁通波形系数: KΦ
计算剩磁密度: Br
[1 (t
20)αBr]1
IL 100
Br20
1.123
T
31.
计算矫顽力:
Hc [1 (t 20)αBr]1
IL 100
Hc20
854.896
kA/m
32. 真空磁导率: μ0 4π10 7 H/m
若 Lvv = 3或9,则 ht2 hr12 br1 2 br2 6 若 Lvv = 4或5,则齿部按三段磁路计算:槽上部段磁路计算长度: ht2t hr1 ;槽中部段磁路计算长度:
ht2m hr2 ;槽下部段磁路的计算长度: ht2b hr3
13. 额定相电流: IN
永磁同步机电磁计算
永磁同步机电磁计算1额定容量P N kVA2相数m 3额定线电压U Nl V 额定相电压U N接法Y接法—1,Δ接法—2Y 接法 U N =V Δ= U NlV 4额定相电流I N =A 5效率ηN%6功率因数cos υ7额定转速n N r/min 8额定频率fHz9冷却方式10转子结构方式11固有电压调整率ΔU N%12永磁材料牌号13预计工作温度t ℃14剩余磁通密度B r20T工作温度时的剩磁密度B r =T 式中αBr —B r 的温度系数%K -1IL—B r 的不可逆损失率%15计算矫顽力H c20kA/m工作温度时的计算矫顽力H c =kA/m16相对回复磁导率μr永磁同步发电机电磁计算程序一、额定数据二、永磁材料选择式中μH/m17在最高工作温度时退磁曲线拐点位置b K18永磁体磁化方向长度h Mcm 19永磁体宽度b M cm 20永磁体轴向长度L M cm21永磁体段数W22极对数p=23永磁体每极截面积A m径向结构—1 切向结构—2径向结构 A m =L M b M cm 2切向结构 A m =2L M b Mcm 224永磁体每对极磁化方向长度径向结构 h MP =2h M cm 切向结构 h MP =h Mcm 25永磁体体积V m =pA m h MP cm 326永磁体质量m m =ρV m ×10-3kg稀土钴永磁ρ=8.1~8.3 g/cm 3铁氧体永磁ρ=4.8~5.2 g/cm 3钕铁硼永磁ρ=7.3~7.5 g/cm 3稀土钴永磁—1 铁氧体永磁—2 钕铁硼永磁—327气隙长度δ均匀气隙δ=δ1+Δcm式中δ1—空气隙长度cm Δ—无纬玻璃丝带厚度或非磁性材料套环厚度cm不均匀气隙δmax =1.5δcm28转子外径D 2cm 29轴孔直径D i2cm 30转子铁芯长度L 2=L M +(W-1)ΔL cm 式中ΔL—隔磁板厚度cm31衬套厚度瓦片形径向结构:三、永磁体尺寸四、转子结构尺寸h h =cm有极靴径向结构:cm式中 h p —极靴高度h h =cm式中Δ'—垫片最大厚度h h =cm式中 h W —槽楔厚度及槽口高度Δ1—外侧垫条厚度Δ2—里侧垫条厚度瓦片形径向结构—1 有极靴径向结构—232极距τcm33极弧系数αp34极间宽度b 2=(1-αp )τcm 35定子外径D 1cm 36定子内径D i1=D 2+2δ1cm 37定子铁芯长度L 1cm38每极每相槽数q 39定子槽数Q =2mpq 40绕组节距y 41短距因数K p =sin式中β=y/mq42分布因数整数槽绕组 K d =五、定子绕组和定子冲片分数槽绕组 K d =式中 d—将q化为假分数后分数的分子43斜槽因数K sk =rad t sk —斜槽宽距离cm44绕组因数K dp =K d K p K sk 45预估永磁体空载工作点b 'm046预估空载漏磁系数σ'047预估空载磁通Φ〃δWb 48预估空载电动势E '0=V49绕组每相串联匝数N'=式中K Φ—磁场波形系数,根据空载磁场计算50每槽导体数N S=双层绕组—2 单层绕组—1双层绕组N s 取偶整数单层绕组N s 取整数式中 a—并联支路数51实际每相串联匝数52估算绕组线规A cu =mm 2式中 J'—定子电流密度A/mm 253实际电流密度J=A/mm 2式中 N—并绕根数54电负荷A=55定子冲片设计见图8-17b b s1cm b s2cm b s0cm h s1cm h j cm h s2cmt =cmb t =cm56槽满率S fA s =cm 2槽绝缘占面积:A i =cm 2式中 C i —槽绝缘厚度cm A ef =A -A cm2S f =57计算空载磁通Φ'δ0=Wb58计算极弧系数αi六、磁路计算QD i 1π()Qh D s i 112+π8222212s s s s b h b b π++??+++122222s s s s i b b b h C πefs t A d N N 2ΦKfNK E dp 44.4'0均匀气隙αi =59铁芯有效长度定转子轴向长度相等时:L ef =L 1+2δcm 定转子轴向长度不相等时:(L 1-L 2)/2δ=8时L ef =L 1+3δcm (L 1-L)/2δ=14时L =L +4δcm 60气隙磁密B δ=T61气隙系数K δ=62气隙磁位差F δ=A 63定子齿磁密B t =T式中 K Fe —铁芯叠压系数,一般取0.92~0.95 64定子齿磁位差F t = 2H t h tA 查附录2磁化曲线得H tA/cmh t —定子齿磁路计算长度圆底槽 h t =h s1+hs2+b s2/6cm 平底槽 h t =h s1+h s2cm 圆底槽—1 平底槽—265定子轭磁密B j =T 66定子轭磁位差F j = 2C j H j l jA 查附录2磁化曲线得H jA/cmC j —考虑到轭部磁通密度不均匀而引入的轭部磁路长度校正系数,查附录3曲线得l j —定子轭磁路计算长度l j =cm 67极靴平均磁密B p =T 式中 L p —极靴轴向长度cm 68极靴磁位差F p = 2H p l pA式中 l p —极靴磁路平均计算长度切向套环结构l p = b M +Δ'+Δcm 切向槽楔结构 l p = b M + h w +Δ1cm 有极靴径向结构 l p =h pcm切向套环结构—1 切向槽楔结构—269磁极衬套平均磁密B h T 式中 h h —磁性衬套的计算厚度cm 70磁性衬套磁位差F h = 2H h l hA 式中 l h —磁性衬套平均计算长度cm 71总磁位差ΣF=F δ+F t +F j +F p +F h A切向结构 F =072主磁导Λδ=H主磁导标么值λδ=73漏磁导Λσ由电磁场计算求得H74漏磁导标么值λσ=75外磁路总磁导Λn =Λδ+ΛσH标么值λ=λ+λσ76永磁体空载工作点b m0 =h m0=77空载漏磁系数σ0=78空载气隙磁通Φ=(b -h )B r A m ×10-4Wb %判断上式的值是否小于1%,否则修改b m0'、σ0',79空载气隙磁密B δ0=T 80空载定子齿磁密B t0=T81空载定子轭磁密B j0=T 82绕组平均半匝长L av = L 1+L Ecm 式中 L—线圈端部平均长cm 83每相绕组电阻R 1=ΩA、E、B级缘:ρcu75= 0.217×10-3Ω·mm 2/cm F、H级缘:ρcu115= 0.245×10-3Ω·mm 2/cmA、E、B级缘—1 F、H级缘—284槽比漏磁导λs =半开口梯形槽:λs =h1h2h3h4h5h6b b0b1b2d1d2梨形槽—1 半开口梯形槽—2式中k 1=3β+1.67 k 2=3β+1cu t av A aN N L ρ2()++++++*************.03231.041bhkdbhkbhbdh ()++++++++06 01514213122123241b h b b h b h k bb h k b h b b h85端部比漏磁导λE =86差漏磁导λd =87齿顶比漏磁导λt =λtmax =δ'=b 2<λtmin =b 2≥ λtmin =均匀气隙:λtmax =λtmin =不均匀气隙—1 均匀气隙-288总漏磁导系数Σλ=λ+λ+λ+λ89每相绕组漏抗X 1=Ω标么值:X 1*=()τβ64.034.01-E l L q00455s s pb b δδα+()τλτλ2m in 2m ax b b t t +-'40δs b t -()m in m ax m in 31δδδ-+3t()()2004b b t h h b t s p p s -+-δ3 tln1s b t πδ40s b t -212101001005.15-?∑?λpqL N f NNUI X 190每极电枢磁动势F a =A91交轴电枢反应电抗X aq =式中 B aq1—交轴电枢反应基波磁密幅值 I q —电枢电流交轴分量X aq 也可以按下列近似公式估算:X aq =Ω无极靴:X aq =Ω有极靴—1 无极靴—2式中 K aq —交轴电枢磁动势的折算系数均匀气隙时,K按下式估算:K aq =不均匀气隙时,K aq 应用电磁场计算求得92交轴同步电抗X q = X+X ΩX q *=93内功率因数角Ψn =(°)94每极直轴电枢磁动势F ad =A式中 K ad —直轴电枢磁动势的折算系数均匀气隙时,K 按下式计算:K ad =f ad =95永磁体负载工作点b mN =h mN =96额定负载气隙磁通ΦδN-4Wb97负载漏磁系数σN =98负载气隙磁密B δN =T99负载定子齿磁密B tN =T 100负载定子轭磁密BjN =T101直轴电枢反应电抗X ad =式中 B ad1—直轴电枢反应基波磁密幅值 I d —电枢电流直轴分量X ad 也可按下式估算:X ad =Ω102直轴同步电抗X d = X +X ΩX d * =103空载励磁电动势E 0 = 4.44fNK dp Φδ0K ΦV 104额定负载时直轴内电动势E d = 4.44fNK dp ΦδN K ΦV105输出电压U=V 106电压调整率Δ%判断ΔU是否小于ΔU N ,如是则成立;否则,重新选择永磁体的尺寸和调整参数七、电压调整率和短路电流计算107短路电流倍数I k *=(°)108永磁体最大去磁工作点f k '= I k *f'b mh =h mh= f mh = 1-b mh判断b mh 是否大于b k ,如是则成立;否则,重新选择永磁体的尺寸和调整参数109定子齿质量m t = QL 1K Fe h t b t ρFe ×10-3kg式中ρFe—硅钢片密度,一般为7.8g/cm 3110定子轭质量m j = π(D 1-h j )h j L 1K Fe ρFe ×10kg 111齿部单位铁耗p tW 按齿磁密查损耗曲线112轭部单位铁耗p jW 按轭磁密查损耗曲线113定子铁耗p Fe = k t p t m t + k j p j m jW式中 k t 、k j 为铁耗校正系数对半闭口槽取k t k j114定子绕组铜耗p cu = K e mI N 2R 1W式中 K e —涡流系数,由于涡流使铜耗增加的系数115机械损耗参考Y系列感应电动机实测数据,p fw 取W 116杂散损耗p s = (0.5~2.5)P N ×10W 117总损耗Σp = p +p +p +p W 118效率η=%八、损耗和效率计算2.63380219.39310231219.3931023FALSE3.950291316900.990.141067361400空气冷却切向套环10XGS-200801.261.23732-0.03923906.3861.086355053 1.26E-064π×10-7 0.256.11212.001428571 73.2173.2FALSE0.50.5FALSE73.25228571 0.593343514 8.14.87.30.10.10.159.63.8122.65FALSEFALSE0.15FALSE1 7.5344406250.9 0.75344406315.59.8123 36.025714298 0.984807753 0.888888889 0.959795081 FALSE0 0.9884480030.5274598211.265 0.9342945320.831.125 0.006682188 241.3324125 193.93418550.9613 32.299293331 FALSE331 198.1414286 0.98757282941 152.53858590.460.650.280.1311.61.12 0.854600904 0.877448398 0.7875153620.109275440.025 0.6782399220.0065403010.92955423212.2FALSEFALSE0.7654418211.1643293791.42E+03 0.7978273660.95135.389649.81.359333333FALSE1 1.79284578793.0121986220.30.42 5.4546210780.853988324126.25FALSEFALSE1 #DIV/0!0 1646.8745023.97134E-061.99E+004.15E-072.07E-014.39E-062.19E+006.87E-013.13E-011.10E+00 0.005633855 16.08928188修改0.659356151 0.687253253。
永磁同步伺服电机电磁计算流程
电机计算与磁场分析1.1 计算程序及算例注:计算采用手算和MathCAD 计算结合使用的方法所以计算结果保留到小数点后三位。
一、 额定数据1.额定功率 5KW N P =2.相数 3m =3.额定电压 直流输出电压 40V d U =额定相电压 217.949V 2.34d N U U +== 三相桥整流考虑二极管压降4.功率因数 cos 0.8ϕ= sin 0.6ϕ=5.额定相电流 310116.071A cos N N N P I m U ϕ⨯==⋅⋅ 6.效率 0.9N η=7.额定转速 100000rpm N n = 8.预取极对数 2p =9.频率 3333Hz 60N pnf ==10.冷却方式 空气冷却 11.转子结构 径向套环12.电压调整率 20%N U ∆≤二、永磁材料选择13.材料牌号 NSC27G 烧结钐钴材料,主要考虑到高温工作环境 该材料高温下退磁小。
14.预计温度 T= 250C 15.剩余磁通密度 20 1.0T r B =0.03%B r rB α=----的温度系数 0r I L B =---的不可逆损失率工作温度下 201(20)(1)0.931T100100Br r r IL B t B α⎡⎤=+--=⎢⎥⎣⎦ 16.计算矫顽力 20760kA/m c H =工作温度下 201(20)(1)707.56KA/m 100100Br C r IL H t H α⎡⎤=+--=⎢⎥⎣⎦17.相对回复磁导率 3010 1.047rr C B H μμ-=⨯=式中 70410H /m μπ-=⨯ 三、永磁体尺寸18.永磁体磁化方向长度 0.35cm M h =19.永磁体宽度 1.56cm M b =20.永磁体轴向长度 5.35cm M L = 21.永磁体段数 1W =22.永磁体每极截面积 28.346cm M M M A L b == 23.永磁体每对极磁化方向长度 20.7cm MP M h h == 24.永磁体体积 311.684cm m M MP V PA h == 25.永磁体质量 31095.812g m m m V ρ-=⨯= 稀土钴材料密度 38.2g/cm ρ=四、转子结构尺寸26.气隙长度 10.19cm δδ=∆+= 均匀气隙空气隙长度10.03cm δ= 非磁性套环长度 0.16cm ∆=27.转子外径 2 3.0cm D = 28.轴孔直径 2 1.0cm i D =29.转子铁心长度 2 5.35cm M L L ==30.衬套厚度 222()0.49cm 2i M h D D h h --∆+==31.极距 2(2)2.105cm 2D pπτ-∆== 径向瓦片形32.极弧系数 0.74p α=33.极间宽度 2(1)0.547cm p b ατ=-= 五、定子绕组和定子冲片34.定子外径 1 4.8cm D =35.定子内径 1212 3.06cm i D D δ=+= 36. 定子铁心长度 1 5.35cm M L L ==长径比λ=1.7537.每极每相槽数 1q =38. 定子槽数 212Q mpq ==39.绕组节距 3y = 整距绕组,影响下面一些系数40. 短距系数 180sin 12p K β==41. 分布因数 1d K = 42.斜槽因数 1sk K =43.绕组因数 1dp d p sk K K K K ==波形系数 sin()20.91.024i iK φαπα⋅==44.预估永磁体空载工作点 '00.67m b = 工作点范围在0.55-0.75Br 内但高速电机应取小一些。
同步电机电磁功率
同步电机电磁功率同步电机是一种常见的电动机,其工作原理是利用电磁力将电能转换为机械能。
在同步电机中,电磁功率是一个重要的指标,它描述了电机在工作过程中消耗或输出的电磁能量。
本文将围绕同步电机电磁功率展开讨论。
我们需要了解电磁功率的概念。
电磁功率是指电机在工作过程中,通过电磁场产生的功率。
在同步电机中,电磁功率可以分为输入功率和输出功率两部分。
输入功率是指电机从电源中吸收的电能,输出功率是指电机输出的机械能。
输入功率与输出功率之间的差值,即为电机的损耗功率。
在同步电机中,电磁功率的计算可以通过测量电流和电压来实现。
根据功率的定义,电磁功率可以表示为电流乘以电压的乘积。
而对于同步电机来说,电压通常是恒定的,因此可以通过测量电流来间接计算电磁功率。
同步电机的电磁功率与电机的工作状态密切相关。
在空载或轻载时,电机的电磁功率相对较低,而在满载或过载时,电机的电磁功率相对较高。
这是因为在满载或过载时,电机需要输出更大的机械功率,因此需要吸收更多的电能。
电磁功率还与电机的效率有关。
电机的效率是指输出功率与输入功率之间的比值,用百分比表示。
电机的效率越高,电磁功率的损耗越小,电机的能量利用效率越高。
而同步电机的电磁功率也受到电机的负载特性影响。
在不同的负载条件下,电机的电磁功率表现出不同的特点。
在轻载时,电机的电磁功率较低,而随着负载的增加,电机的电磁功率逐渐增加,直到达到最大功率点。
超过最大功率点后,电机的电磁功率开始下降。
在实际应用中,我们可以通过调整电机的负载来控制电磁功率的输出。
通过增加或减小负载,可以改变电机的电磁功率输出,从而满足不同的工作需求。
同步电机的电磁功率是描述电机工作状态和性能的重要指标。
了解和掌握电磁功率的计算和调控方法,对于电机的高效运行和能量利用具有重要意义。
在实际应用中,我们可以根据工作需求来调整电机的负载,以实现电磁功率的控制和优化。
希望本文的内容能够对读者理解同步电机电磁功率有所帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
半匝长度292磁路计算采用Ansoft自带的磁路计算模块,RMxprt进行初期的电机电磁计算。
RMxprt计算结果如下:ADJUSTABLE-SPEED PERMANENT MAGNET SYNCHRONOUS MOTOR DESIGNGENERAL DATARated Output Power (kW): 11.7 Rated Voltage (V): 333Number of Poles: 10Frequency (Hz): 60Frictional Loss (W): 175.5Windage Loss (W): 40Rotor Position: InnerType of Circuit: Y3Type of Source: SineDomain: T imeOperating Temperature (C): 75STATOR DATANumber of Stator Slots: 24Outer Diameter of Stator (mm): 210 Inner Diameter of Stator (mm): 136 Type of Stator Slot: 3Dimension of Stator Sloths0 (mm): 1.5hs1 (mm): 1.352hs2 (mm): 21.65bs0 (mm): 3.5bs1 (mm): 9.3bs2 (mm): 14.9rs (mm): 1Top Tooth Width (mm): 9.26977 Bottom Tooth Width (mm): 9.35135 Skew Width (Number of Slots): 0.393 Length of Stator Core (mm): 218 Stacking Factor of Stator Core: 0.95 Type of Steel: 50W470Slot Insulation Thickness (mm): 0 Layer Insulation Thickness (mm): 0 End Length Adjustment (mm): 0 Number of Parallel Branches: 2 Number of Conductors per Slot: 58 Type of Coils: 21Average Coil Pitch: 2Number of Wires per Conductor: 4Wire Diameter (mm): 0.85Wire Wrap Thickness (mm): 0.06Net Slot Area (mm^2): 278.32Limited Slot Fill Factor (%): 75Stator Slot Fill Factor (%): 69.0282Coil Half-Turn Length (mm): 291.698ROTOR DATAMinimum Air Gap (mm): 1Inner Diameter (mm): 80Length of Rotor (mm): 218Stacking Factor of Iron Core: 1Type of Steel: ironPolar Arc Radius (mm): 63.5Mechanical Pole Embrace: 0.8543 Electrical Pole Embrace: 0.838481Max. Thickness of Magnet (mm): 3.5 Width of Magnet (mm): 35.0244Type of Magnet: N42SH60Type of Rotor: 1Magnetic Shaft: YesPERMANENT MAGNET DATAResidual Flux Density (Tesla): 1.248Coercive Force (kA/m): 952Maximum Energy Density (kJ/m^3): 297.024 Relative Recoil Permeability: 1.04323 Demagnetized Flux Density (Tesla): 0 Recoil Residual Flux Density (Tesla): 1.248 Recoil Coercive Force (kA/m): 952MATERIAL CONSUMPTIONArmature Wire Density (kg/m^3): 8900 Permanent Magnet Density (kg/m^3): 7500 Armature Core Steel Density (kg/m^3): 7750Rotor Core Steel Density (kg/m^3): 7870 Armature Copper Weight (kg): 8.20258 Permanent Magnet Weight (kg): 1.97833 Armature Core Steel Weight (kg): 21.0194 Rotor Core Steel Weight (kg): 13.1096Total Net Weight (kg): 44.3099Armature Core Steel Consumption (kg): 72.8184 Rotor Core Steel Consumption (kg): 13.1096 STEADY STATE PARAMETERSStator Winding Factor: 0.925031D-Axis Reactive Reactance Xad (ohm): 1.34819Q-Axis Reactive Reactance Xaq (ohm): 1.34819D-Axis Reactance X1+Xad (ohm): 2.60051Q-Axis Reactance X1+Xaq (ohm): 2.60051 Armature Leakage Reactance X1 (ohm): 1.25232 Zero-Sequence Reactance X0 (ohm): 0.849846 Armature Phase Resistance R1 (ohm): 0.323492 NO-LOAD MAGNETIC DATAStator-Teeth Flux Density (Tesla): 1.77706Stator-Yoke Flux Density (Tesla): 1.42319Rotor-Yoke Flux Density (Tesla): 0.657489Air-Gap Flux Density (Tesla): 0.854749Magnet Flux Density (Tesla): 0.882299Stator-Teeth By-Pass Factor: 0.00861322Stator-Yoke By-Pass Factor: 3.06585e-005 Rotor-Yoke By-Pass Factor: 0Stator-Teeth Ampere Turns (A.T): 203.897Stator-Yoke Ampere Turns (A.T): 7.05032Rotor-Yoke Ampere Turns (A.T): 1.53221Air-Gap Ampere Turns (A.T): 763.681Magnet Ampere Turns (A.T): -976.375Leakage-Flux Factor: 1Correction Factor for MagneticCircuit Length of Stator Yoke: 0.348841 Correction Factor for MagneticCircuit Length of Rotor Yoke: 0.720506 No-Load Line Current (A): 6.1376No-Load Input Power (W): 363.546Cogging Torque (N.m): 0.0286775FULL-LOAD DATAMaximum Line Induced Voltage (V): 430.965 Root-Mean-Square Line Current (A): 22.5527 Root-Mean-Square Phase Current (A): 22.5527 Armature Thermal Load (A^2/mm^3): 182.516 Specific Electric Loading (A/mm): 36.7383 Armature Current Density (A/mm^2): 4.96799 Frictional and Windage Loss (W): 215.5Iron-Core Loss (W): 110.95Armature Copper Loss (W): 493.608Total Loss (W): 820.058Output Power (W): 11705.3Input Power (W): 12525.3Efficiency (%): 93.4528Synchronous Speed (rpm): 720Rated Torque (N.m): 155.246Torque Angle (degree): 17.1432Maximum Output Power (W): 33410.2Torque Constant KT (Nm/A): 7.01043WINDING ARRANGEMENTThe 3-phase, 2-layer winding can be arranged in 24 slots as below: AZBXYAZBCYAZXCYABXCYZBXCAngle per slot (elec. degrees): 75Phase-A axis (elec. degrees): 97.5First slot center (elec. degrees): 0TRANSIENT FEA INPUT DATAFor Armature Winding:Number of Turns: 232Parallel Branches: 2Terminal Resistance (ohm): 0.323492End Leakage Inductance (H): 0.000114719 2D Equivalent Value:Equivalent Model Depth (mm): 218 Equivalent Stator Stacking Factor: 0.95 Equivalent Rotor Stacking Factor: 1 Equivalent Br (Tesla): 1.248Equivalent Hc (kA/m): 952Estimated Rotor Inertial Moment (kg m^2):0.053233。