Calculating the interior permanent-magnet motor
Seymour Duncan Mag Mic声学吉他音孔拾音器说明书
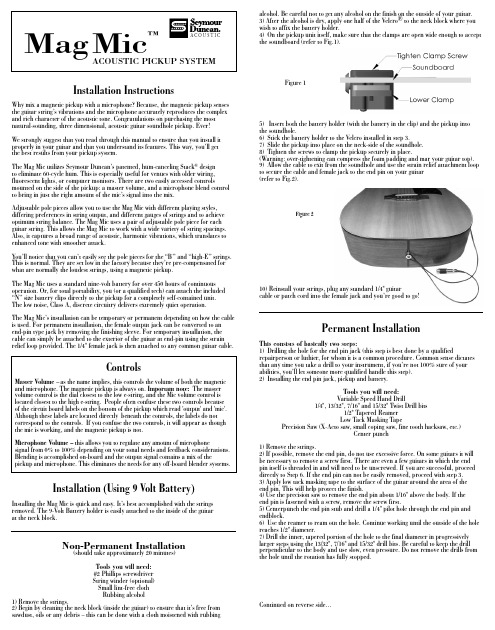
Installation InstructionsWhy mix a magnetic pickup with a microphone? Because, the magnetic pickup senses the guitar string’s vibrations and the microphone accurately reproduces the complex and rich character of the acoustic tone. Congratulations on purchasing the most natural-sounding, three dimensional, acoustic guitar soundhole pickup. Ever!We strongly suggest that you read through this manual to ensure that you install it properly in your guitar and that you understand its features. This way, you’ll get the best results from your pickup system.The Mag Mic utilizes Seymour Duncan’s patented, hum-canceling Stack ® design to eliminate 60-cycle hum. This is especially useful for venues with older wiring, fluorescent lights, or computer monitors. There are two easily accessed controlsmounted on the side of the pickup: a master volume, and a microphone blend control to bring in just the right amount of the mic’s signal into the mix.Adjustable pole pieces allow you to use the Mag Mic with different playing styles, differing preferences in string output, and different gauges of strings and to achieve optimum string balance. The Mag Mic uses a pair of adjustable pole piece for each guitar string. This allows the Mag Mic to work with a wide variety of string spacings. Also, it captures a broad range of acoustic, harmonic vibrations, which translates to enhanced tone with smoother attack.You’ll notice that you can’t easily see the pole pieces for the “B” and “high-E” strings. This is normal. They are set low in the factory because they’re pre-compensated for what are normally the loudest strings, using a magnetic pickup.The Mag Mic uses a standard nine-volt battery for over 450 hours of continuous operation. Or, for total portability, you (or a qualified tech) can attach the included “N” size battery clips directly to the pickup for a completely self-contained unit. The low noise, Class A, discrete circuitry delivers extremely quiet operation.The Mag Mic’s installation can be temporary or permanent depending on how the cable is used. For permanent installation, the female output jack can be converted to an end-pin type jack by removing the finishing sleeve. For temporary installation, the cable can simply be attached to the exterior of the guitar at end-pin using the strain relief loop provided. The 1/4" female jack is then attached to any common guitar cable.Installation (Using 9 Volt Battery)Installing the Mag Mic is quick and easy. It’s best accomplished with the strings removed. The 9-Volt Battery holder is easily attached to the inside of the guitar at the neck block.Non-Permanent Installation(should take approximately 20 minutes)Tools you will need: #2 Phillips screwdriver String winder (optional)Small lint-free cloth Rubbing alcohol1) Remove the strings.2) Begin by cleaning the neck block (inside the guitar) to ensure that it’s free from sawdust, oils or any debris – this can be done with a cloth moistened with rubbingalcohol. Be careful not to get any alcohol on the finish on the outside of your guitar.3) After the alcohol is dry, apply one half of the Velcro® to the neck block where you wish to affix the battery holder.4) On the pickup unit itself, make sure that the clamps are open wide enough to accept the soundboard (refer to Fig.1).Figure 15) Insert both the battery holder (with the battery in the clip) and the pickup into the soundhole.6) Stick the battery holder to the Velcro installed in step 3.7) Slide the pickup into place on the neck-side of the soundhole.8) Tighten the screws to clamp the pickup securely in place.(Warning: over-tightening can compress the foam padding and mar your guitar top).9) Allow the cable to exit from the soundhole and use the strain relief attachment loop to secure the cable and female jack to the end pin on your guitar (refer to Fig.2).Figure 210) Reinstall your strings, plug any standard 1/4" guitarcable or patch cord into the female jack and you’re good to go!Permanent InstallationThis consists of basically two steps:1) Drilling the hole for the end pin jack (this step is best done by a qualifiedrepairperson or luthier, for whom it is a common procedure. Common sense dictates that any time you take a drill to your instrument, if you’re not 100% sure of your abilities, you’ll let someone more qualified handle this step).2) Installing the end pin jack, pickup and battery.Tools you will need: Variable Speed Hand Drill1/4", 13/32", 7/16" and 15/32" Twist Drill bits1/2" Tapered Reamer Low Tack Masking TapePrecision Saw (X-Acto saw, small coping saw, fine tooth hacksaw, etc.)Center punch1) Remove the strings.2) If possible, remove the end pin, do not use excessive force. On some guitars it will be necessary to remove a screw first. There are even a few guitars in which the end pin itself is threaded in and will need to be unscrewed. If you are successful, proceed directly to Step 6. If the end pin can not be easily removed, proceed with step 3.3) Apply low tack masking tape to the surface of the guitar around the area of the end pin. This will help protect the finish.4) Use the precision saw to remove the end pin about 1/16" above the body. If the end pin is fastened with a screw, remove the screw first.5) Centerpunch the end pin stub and drill a 1/4" pilot hole through the end pin and endblock.6) Use the reamer to ream out the hole. Continue working until the outside of the hole reaches 1/2" diameter.7) Drill the inner, tapered portion of the hole to the final diameter in progressively larger steps using the 13/32", 7/16" and 15/32" drill bits. Be careful to keep the drill perpendicular to the body and use slow, even pressure. Do not remove the drills from the hole until the rotation has fully stopped.Continued on reverse side...ControlsMaster Volume – as the name implies, this controls the volume of both the magnetic and microphone. The magnetic pickup is always on. Important note: The master volume control is the dial closest to the low e-string, and the Mic volume control is located closest to the high e-string. People often confuse these two controls because of the circuit board labels on the bottom of the pickup which read 'output' and 'mic'. Although these labels are located directly beneath the controls, the labels do not correspond to the controls. If you confuse the two controls, it will appear as though the mic is working, and the magnetic pickup is not.Microphone Volume – this allows you to regulate any amount of microphonesignal from 0% to 100% depending on your tonal needs and feedback considerations. Blending is accomplished on-board and the output signal contains a mix of thepickup and microphone. This eliminates the needs for any off-board blender systems.1) Lay the pickup upside down on a flat surface. Locate the two pairs of solder padsthat the battery clips will be mounted to.2) Press the mounting tabs on the bottom of the battery clips into the appropriate holesin the PCB that serves as the bottom cover. Be sure that the dimpled tabs that contactthe battery are both oriented toward the outside edges of the pickup (refer to Fig.4).Figure 43) Tin the solder iron tip and lay it on the inside bottom of one of the clips.Heat the clip at one end until you are able to smoothly flow solder in between the clipand the solder pad. Move the soldering iron to the other end of the clip and solderagain. Repeat the process for the second clip.4) Check your solder job, all joints should look smooth and shiny (not lumpy andgray). These solder joints are all that is mechanically holding the battery clips in place.5) It is optional to cut the 9-volt battery holder off – your choice.6) Installation of the pickup into the guitar is the same as either of the two previouslydescribed methods, depending on whether you desire a permanent or non-permanentinstallation of the end-pin jack.When to Change to BatteryWith hard plucking of notes, you will notice distortion on the attack of the note.When this occurs, your battery is starting to get low. At this point, you’ll get at least 20hours of use before it dies completely (four with the “N” battery). However, you shouldchange the battery at this point in order to preserve the great tone of the pickup.keep in mind that the “N” battery clips are secured to the PCB by the solder jointonly. Not to overly stress this point, but please take care when changing thebattery.Seymour Duncan Acoustic5427 Hollister AvenueSanta Barbara, CA 93111-2345Phone: 805-964-9610 Fax: 805-964-9749Hand built in Santa Barbara, California. Velcro is a registered trademark of Velcro Industries B.SpecificationsMagnetic pickupDC Resistance – 3.8k OhmsResonant Frequency – 16kHzGauss Strength – 780 max (adjustable)Microphone capsulePattern – Omni-directionalSensitivity - -35dBFrequency range – 20 to 20kHzS/N ratio - >62dBCurrent consumption – 0.5mAOnboard electronics2 Channels, summed at the outputSupply Voltage – 9VdcCurrent consumption – 1.1mA (preamp + mic capsule)Battery Life – 450+ hoursMaximum signal swing – 1.5V @ onset of clip w/9V power supplyThd – 0.02% @ onset of clippingNoise:·Pickup channel – -102dBV with 5k ohm source impedance·Mic channel – -96dBV with mic capsule attachedInstalling the end pin jack, pickup and batteryTools you will need:1/2" Open End Wrench3/32" Allen Wrench#2 Phillips screwdriverString winder (optional)Small lint-free clothRubbing alcohol1) Remove the strap button, small dress hex nut, and small dress washer from thefemale jack; and then remove the black plastic sleeve.2) From the inside (cable side) of the guitar, keep the large hex nut, large dress washerand star washer on the interior side of the jack and slide it through the end pin hole.The jack should protrude from the outside surface between 5/16" and 11/32". If it isnot within this range, it must be removed and the position of the large hex nut adjustedaccordingly.3) Install the small dress washer and the smaller hex nut. Hold the jack in place withthe allen wrench and use the 1/2" open end wrench to tighten the nut.4) Screw on the strap button and hand tighten.5) Clean the neck block to ensure that it’s free from sawdust, oils or any debris –this can be done with a cloth moistened with rubbing alcohol (be careful not to get anyalcohol on the finish of your guitar).6) After the alcohol is dry, apply one half of the Velcro® to the neck block where youwish to affix the battery holder.7) Insert both the battery holder (with the battery in the clip) and the pickup into thesoundhole.8) Stick the battery holder to the Velcro installed in step 2.9) On the pickup unit itself, make sure that the clamps are open wide enough to acceptthe soundboard.10) Slide the pickup into place on the neck-side of the soundhole.11) Tighten the screws to clap securely (warning: over-tightening can compress the foampadding and mar your guitar top).12) Reinstall strings and plug in a standard 1/4" guitar cable to the end pin jack andyou’re done.13) Make great music!Installation (Using “N” Battery)By installing the “N” battery clips, the Mag Mic becomes a single, integrated unit forthe ultimate in portability. However, this entails some compromises. Battery life isseverely limited: you’ll get 50 hours with an “N” battery as opposed to 450 with astandard 9 volt. Also, when inserting an “N” battery, you must ensure that it’spolarized correctly. The positive end of the battery must be oriented toward the “plus”symbol next to the microphone on the underside of the pickup (refer to Fig.4).Installing the “N” battery clips is a tricky process and requires high-level solderingabilities and a good quality iron with the correct tip. It is essential that the work bedone properly. Even when done perfectly, the clip will still not stand much abuse.It is advisable that care be used when installing and changing batteries. If you’re notentirely confident that you posses these abilities, please have this procedure done bya qualified electronics technician. Here are the steps:Installation of ClipsTools you will need:50 watt, pencil type soldering iron with medium, spade type tipRosin core solder PN# 501050-105 Rev BA C O U S T I C。
UPS Universal Shipping for Magento 2.x 配置指南说明书

Configuration ofUPS Universal Shippingfor Magento 2.xContents●UPS Account●Addresses●Package Boxes●Shipping Methods●Configuration●Checkout●Customer AccountUPS Account1.If you don’t have UPS Account Credentials get them byhttps://2.Follow to Admin Main Menu -> Extmag -> Settings -> ShipperAccounts.3.Click on the “Add New Shipper Account” button.4.Input your credentials of UPS to fields and click on the “Save”button.Addresses1.Follow to Admin Main Menu -> Extmag -> Settings -> Addresses.2.Click on the “Add New Address” button.3.Input your Address to fields and click on the “Save” button.Package BoxesOptionally, you can create packaging boxes.1.Follow to Admin Main Menu -> Extmag -> Settings -> PackageBoxes.2.Click on the “Add New Box” button.3.Input your Box parameters to fields and click the “Save” button.Shipping MethodsCreate one or more shipping methods as needed. These methods will show in the checkout.1.Follow to Admin Main Menu -> Extmag -> Shipping Methods ->Shipping Methods.2.Click on the “Add New Shipping Method” button.3.Input shipping method data to fields and click the “Save” button.Configuration1.Follow to Admin Main Menu -> Extmag -> Settings -> UPSConfiguration.2.First, click the “General” tab on the left and fill in the necessaryfields.3.Moving from tab to tab, fill in the necessary fields.Description options of the extension configuration General Tab●General○Account■Select your carrier account by default or create an account followingthe link “Add Shipper Account” and then select it here○Shipper Address■Select your shipper address by default or create an address following the link “Add Address” and then select it here■This is the main address of your UPS account connecting with theShipper Number.○Ship From Address■Select your shipper address by default or create an address following the link “Add Address” and then select it here■It is your warehouse or store address○Destination Type■this item has two options●Auto: the carrier will automatically detect the type of recipientaddress.●Residential: the option is a flag to indicate if the receiver is aresidential location○Shipping Description■The Description of Goods for the shipment. Applies to internationaland domestic shipments. Provide a detailed description of items beingshipped for documents and non-documents■Examples: "annual reports" and "9 mm steel screws"■Required if all of the listed conditions are true: ShipFrom and ShipTocountries or territories are not the same; The packaging type is notUPS Letter; The ShipFrom and or ShipTo countries or territories arenot in the European Union or the ShipFrom and ShipTo countries orterritories are both in the European Union and the shipments servicetype is not UPS Standard.Packaging Tab●Packaging○Type■We recommend choosing by default “Customer Supplied Package” or choosing from the list at your discretion.○Additional Handling■The Additional Handling charge is an extra fee for shipmentsthat require special handling while being transported by UPS.■The Additional Handling charge depends on the packaging anddimensions. The following general guidelines apply. Though,UPS also reserves the right to assess the Additional HandlingCharge for any package that, in UPS's sole discretion, requiresspecial handling.●Weight○Attribute of Product Weight■If your products have a weight, indicate the product attribute for theweight. By default, this is the attribute with the code "weight"○Average Product Weight■If some of your products do not indicate the weight, please indicatethe average weight of the product. This is required for packagingproducts in boxes.○Pack Weight■If packing in boxes will not be used, indicate the empty package'sweight.●Dimensions○Attribute of Product Width (Length, Height)■Specify from which product attribute to get width (length, height) data ○Average Product Width (Length, Height)■Please indicate the average width (length, height) for products without dimensions. This will help you pack food into boxes.○Applicable Boxes■Specify which boxes to use for this carrier, store, or destination.■You can create missing boxes by the link "Add Package Box" underthe selection field.○Exclude Product Categories■Products from the categories selected here do not count towards boxpackaging; each product has been packaged separately.○Attribute of Product Pre-packed■The attribute must be Yes\No type. If Yes, the product will be aseparate package.●Volumetric Weight○Enabled■Enable/Disable using volumetric weight.○Attribute of Product Volumetric Weight○Type■If you are specifying volumetric weight in kilograms or pounds in theproduct, then select the "Weight" option. If you specify volumetric weightas a product of dimensions, then specify "Length x Width x Height".○Dividing factor for the metric system (kg, cm)■If you are specifying volumetric weight in kilograms or pounds in aproduct, then enter 1. If you are reporting volumetric weight as a productof dimensions, then indicate what your courier advises. Usually, it is 5000.○Dividing factor for the imperial system (lb, inch)■If you are specifying volumetric weight in kilograms or pounds in aproduct, then enter 1. If you are reporting volumetric weight as a productof dimensions, then indicate what your courier advises. As a rule, this is139.○Max Package Volume Weight for the metric system (kg, cm)○Max Package Volume Weight for the imperial system (lb, inch)Returns Tab●Returns○Creating Return Label With Shipping Label■ A return label is created together with a direct label simultaneously.You can print it and put it in the parcel.○Service■UPS Print Return Label (PRL)●Print a return label to include in an outbound shipment, orprovide a label to your customer at a later date■UPS Electronic Return Label (ERL)●Have UPS e-mail a return label to your customer●Customer○Allow Print■Allow the buyer to print the return label from their account○Allow Create■Allow the buyer to create a return label from their account. References Tab●References○Reference No. 1 Type■ A shipment reference is an identifier you define by completing the"reference" fields during the shipping process. This reference could bea purchase order (PO) number, a customer number, a company name,a Bill of Lading number, or a phrase that identifies that shipment --such as "10 crates" or "gift for Mom." Shipment references can be anycombination of letters and numbers up to 35 characters.○Reference No. 1■The data of the reference○Bar code for Reference No. 1 on shipping labels■The Code 128 bar code is used for reference bar codes.■Reference No. 1 can be selected to print as a bar code on theshipping label. The option applies to all packages in the shipment. Payments Tab●Payments○Currency■Specify the currency of your account on the carrier's website○Shipment Payer■Specify who will pay for the shipping. The payer can be the sender or athird party.○Duty And Tax Payer■Indicate who will pay the duties and taxes.○Declared Value Type■When calculating the total cost of a parcel, only the price of products orthe price of products, discounts, and fees can be taken into account.○Insurance■Specify the amount of insurance in the request○Negotiated rates■Apply specially negotiated prices.■To do this, you need to have a contract with the carrier○COD■Rely on UPS to collect payment for your shipment at the time ofdelivery■UPS will attempt to collect the amount shown on the C.O.D. tagor package label and then send the payment to you. Thepackage will be returned if UPS cannot collect the payment afterthree attempts.■The payment method must be appropriate.Notification Tab●Notification○Services■ A UPS notification service can send you and your customer e-mailsabout important events in the progress of your shipment.■For forward and return international shipments as well as for domestic shipments (for US and PR). It will be using three selected servicesonly.○Language■notification language●Emails○Email for Errors■Specify the email to which notifications of delivery errors will be sent Printing Tab●Printing○Type■Specify the type of label to print. It can be PDF or thermal type.○Mass Print■With bulk printing, you can only print unprinted labels or all.○Thermal Settings■Height■Specify the height of the thermal label you needPickups Tab●Pickup○Earliest Pickup Time■Indicate the opening time of your store or warehouse. The time whenyou are ready to deliver the parcels to the courier.○Latest Pickup Time■Specify the closing time for your store or warehouse.○Payment Method■The carrier does not charge a pickup fee in some countries andterritories. For other countries, you need to specify the paymentmethod "Pay by shipper account"○Special Instructions■These are special instructions for the driver.○Shipping Labels Available■This element should be set to “Yes” to indicate that the user haspre-printed shipping labels for all the packages, otherwise, this will betreated as false.■Default “Yes”●Schedule○Schedule settings for which pickups will be created. You can also create pickups manually if the schedule is disabled.Tracking Tab●Tracking Schedule○If enabled, requests for delivery information will be sent according to the schedule for each created shipment. If an error is received or the delivery wassuccessfully delivered, then a request will no longer be made for this trackingnumber.Access Point Tab●Access PointA UPS Access Point™ location is a participating retail outlet, such as a grocery storeor petrol station that serves as a convenient and efficient UPS parcel delivery andretrieval location. You can also drop off labeled and prepaid UPS Returns® parcels at any UPS Access Point location.○Type■Hold for Pickup at UPS Access Point●At no additional charge, UPS can hold your package up to fivedays●For use by approved shippers to identify a UPS Access Pointlocation as an alternate delivery option during shipmentpreparation●UPS will deliver your package to the UPS Customer Centeryou choose and then call the recipient when the package isready. Packages are usually available by 8:30 a.m. on thescheduled day of delivery.■UPS Access Point Delivery●Ship parcels directly to a UPS Access Point location forcollection by the receiver.○Account■Specify the sender's account on the carrier's websiteFreight Tab●General○Service■The code for the UPS Service associated with the shipment.○Handling Unit■The code associated with handling unit type.○Packaging Type■The code for the UPS packaging type associated with the shipment.○Class○NMFC Commodity Code■National Motor Freight Classification Commodity code. The first 6digits represent the Prime Code and the remaining 2 digits representthe Sub Prime Code.●References○Reference No. 1 Type○Bar code for Reference No. 1 on shipping labels○Reference No. 2 TypeInternational Invoice Tab●International Invoice○Paperless■UPS Paperless™ Invoice is an industry first that promotessustainability and eliminates the need for paper commercial invoicesby integrating order and shipment processing, and transmittingcommercial invoice data to enable clearance by customs officesacross the globe. You can easily manage your paperless shipping lanepreferences on a per-shipment basis, or by shipping lane, to gain evenmore flexibility.■UPS Paperless Invoice works seamlessly with all current UPSshipping systems. There is no need for additional software. Anycompany, regardless of size or industry segment, can use UPSPaperless Invoice free of charge.○Terms of Shipment■Indicates the rights to the seller from the buyer.■Valid values:CFR: Cost and FreightCIF: Cost Insurance and FreightCIP: Carriage and Insurance PaidCPT: Carriage Paid ToDAF: Delivered at FrontierDDP: Delivery Duty PaidDDU: Delivery Duty UnpaidDEQ: Delivered Ex QuayDES: Delivered Ex ShipEXW: Ex WorksFAS: Free Alongside ShipFCA: Free CarrierFOB: Free On Board○Reason for Export■ A reason to export the current international shipment■Valid values: SALE, GIFT, SAMPLE, RETURN, REPAIR,INTERCOMPANYDATA, Any other reason○Invoice Number■Commercial Invoice number assigned by the exporter■Can use macro paste: #order_id#, #shipment_id#, #invoice_id#○Comments■Max length 150. Can use macro paste: #customer_name#,#order_id#, #shipment_id#, #invoice_id#, #store_id#, #store_code#,#store_name#○Declaration Statement■This is the legal explanation, used by Customs, for the delivering ofthis shipment. It must be identical to the set of declarations actuallyused by Customs. Examples of declarations that might be entered inthis field are: I hereby certify that the goods covered by this shipmentqualify as originating goods for purposes of preferential tariff treatmentunder the NAFTA. I hereby certify that the information on this invoiceis true and correct and the contents and value of this shipment is asstated above. EEA statement: The exporter of the products coveredby this document declares that except where otherwise clearlyindicated these products are of EEA preferential origin■Max length 550○Sold To Address■The Sold To party’s country code must be the same as the Ship Toparty’s country code with the exception of Canada and satellitecountries●Product Attributes○Description■Product attribute containing the short name of the product ○Country of Manufacture■Product attribute containing the country of origin○Unit of Measurement■Select the term that best describes the way your product is measured.For example, barrels, bales, tons, etc.○Harmonized (Commodity) Code■Product attribute containing Harmonized (Commodity) Code■Determining the correct rate of duty when shipping internationally is a frequent challenge for small to medium-sized businesses. You want tomake sure your shipment faces minimal disruption when it comes tocustoms clearance. At the same time, you don't want to pay more thanrequired for shipping your product across borders■The Harmonized System (HS) code is integral to this process.Organized into 97 chapters, HS codes comprise a global index usedto describe every good being imported or exported. And while the HSindex may seem complicated at first, becoming familiar with itsworkings will help you avoid the likelihood of disruptions or delays inyour product journey○ScheduleB Code■Product attribute containing the ScheduleB Code of the product■A Schedule B number is a 10-digit number used in the United States to classify physical goods for export to another country. The ScheduleB is based on the international Harmonized System (HS) of 6-digitcommodity classification codes. There is a Schedule B number forevery physical product, from paperclips to airplanes●Taxpayer Identification○VAT/Tax/EORI ID■The Tax ID number (EIN/VAT)○Consignee VAT/Tax/EORI ID■The customer in another country is responsible for paying VAT andduties but for certain products and values, the merchant can collectVAT in the checkout (as normal) and the merchant then takes over theresponsibility for reporting this VAT to this country authorities. So themerchant is, from one aspect, considered as both the exporter andimporter here.Automatic Tab●Automatic Label Creation○Enabled■Turn on or off automatic creation of shipping labels■Make sure your Magento cron job is running○Create Invoice■Create invoice after creating label(s)○Create Shipment■Create shipment after creating label(s)○Allowed Order Statuses■Specify the order statuses for which you want to create shipping labels ○Allowed Shipping Methods■Specify the shipping methods for which you want to create shippinglabels○Service■Specify the shipping methods by which the delivery will be carried out ○Service for International Destination■Specify the shipping methods that will be used for internationaldeliveryMass Actions Tab●Mass Label Creation○Create Invoice■Create invoice after creating label(s)○Create Shipment■Create shipment after creating label(s)○Allowed Order Statuses■Specify the order statuses for which you want to create shipping labels ○Allowed Shipping Methods■Specify the shipping methods for which you want to create shippinglabels○Service■Specify the shipping methods by which the delivery will be carried out ○Service for International Destination■Specify the shipping methods that will be used for internationaldeliveryManual Actions Tab●Manual Label Creation○Create Invoice■Create invoice after creating label(s)○Create Shipment■Create shipment after creating label(s)Other Options Tab●Options○Saturday Pickup■UPS is the only carrier that will pick up all services on Saturday, soshipments can reach their destinations one day sooner. With ascheduled Saturday pickup, you can also opt-in to receive Saturdaydeliveries at no additional cost.○Saturday Delivery■Saturday Delivery from UPS allows you to stretch your business week even further. Like your busy schedules, our services don't stop for theweekend. And with the expansion of our weekend services, SaturdayDelivery is now more convenient than ever. With Saturday delivery*from UPS, you can receive your orders up to two days faster thanbefore, and at no extra cost.○Carbon Neutral■UPS ships millions of packages each day. We know that ourcustomers are as concerned as we are about the impact shipping hason the environment. That's why we offer a carbon neutral shippingoption. Your business can reduce its carbon footprint whiledemonstrating your commitment to sustainability.○Delivery Confirmation for Shipment Level■Verify that your shipment was delivered with your choice of signatureor adult signature options○Delivery Confirmation for Package Level■Verify that your shipment was delivered with your choice of signatureor adult signature options■Only for destination US50 to US50,PR or Canada to Canada or Puerto Rico to US50,PR○Order Status After Created Shipping Label■Change order status after creating shipping label○Movement Reference Number (MRN)■Must contain alphanumeric characters only. Must be a length of 18characters. The 3rd and 4th Characters must be the Shipper countryISO Code.■The MRN number is the customs registration number that enables the customs authority to identify and process your export packages in theAtlas customs system. It is the main reference for customsdeclaration and the most important link with your export goods●Dangerous Goods○Product Categories with Dangerous Goods■Select product categories containing only dangerous goods. You cancreate a category for dangerous goods only and disable its display onthe site.CheckoutOn the checkout page, your customers can see and select the shipping methods you have created in the module.You can see the link for creating returns and the RMA items list in the customer account.。
飞控日志使用方法(英文)

Diagnosing problems using LogsThis page aims to show you how to diagnose the top 5 most common problemsaffecting Copter in particular but to some extent Plane and Rover as well.Contents [hide]∙ 1 Log Types (Dataflash vs tlogs)∙ 2 Mechanical Failures∙ 3 Vibrations∙ 4 Compass interference∙ 5 GPS glitches∙ 6 Power Problems (BrownOuts, etc)∙7 Unexpected ERRORS including FailsafesLog Types (Dataflash vs tlogs)There are two ways to record your flight data. With some exceptions, the two methods record very similar data but in different ways:∙Dataflash logs use the Pixhawk (or APM2.x) onboard dataflash memory, which you can download after the flight. On Plane and Rover dataflash logs are createdsoon after start-up. On Copter they are created after you first arm the copter.∙Telemetry logs(also known as “tlogs”) are recorded by the Mission Planner (or other ground station) when you connect ArduPilot to your computer viaa telemetry link.If you are not yet familiar with the basics of these log files, first review theintroductory pages to understand where these logs are stored and how you candownload and view the information held within them.Mechanical FailuresCommon mechanical failures include a motor or ESC failure (including ESC sync failures), the propeller slipping or coming off, etc. These appear in the log as asudden divergence in the desired roll and pitch vs the vehicles actual roll andpitch. This discrepancy is most clearly visible in the dataflash logs by graphing theATT message’s Roll-In vs Roll and Pitch-In vs Pitch and to a lesser extent in the NavYaw vs Yaw.In the example above the vehicle’s actual roll (“Roll”) closely follows the desired roll (“Roll-In”) for the first part of the log but then suddenly diverges.The flight controller wanted the roll to remain level (0 roll) but it was unable to likely meaning a mechanical failure. This is very different from a software failure in which the flight controller freaked out and for some strange reason suddenly wanted the copterup-side-down because in such cases the desired roll would be also be crazy and actual roll would follow.Extra notes:∙tlogs are generally more difficult to use in this case because although we have nav_roll and nav_pitch which hold the desired roll and pitch, they are only updated when in RTL, Loiter or Auto flight modes.∙in AC3.1 (and higher) Roll-In and Pitch-In only hold the desired roll and pitch while in stabilize mode. When in an autopilot mode you must look at the NTUN messages’s DRol and DPit columnsVibrationsHigh vibrations cause the Copter’s accelerometer based altitude a nd horizontal position estimates to drift far off from reality which leads to problems with alt hold (normally rocketing into the sky) or Loiter (drifting).Vibrations are best viewed by graphing thedataflash’s IMU message’s AccX, AccY and AccZ values. The AccX and AccY values (primarily used for horizontal position control) should be between -3 and +3 m/s/s and the AccZ should be between -15 and -5 m/s/s. The accelerometer values will change momentarily as the copter moves up and down which is why it is better to pull the data from a portion of the flight where the copter was mostly stationary but even with a copter that is moving you can still see the vibration levels by comparing the difference between the top and bottom of the “grass”.an occasional blade of grass going over the lines is ok but if it’s sustained then it’s likely a real vibration problem.The below graph shows acceptable vibration levels.Tlog’s RAW_IMU xacc, yacc and zacc can also be used but their update is much slower (generally less than 10hz) than the dataflash log (50hz) so it becomes moredifficult to see whether the changes in accelerometer values are due to the copter moving or are just vibrations.If using tlogs the scale is in milli-Gs so the acceptable range for xacc and yacc is -300 ~ +300, and for zacc is -500 ~ -1500. Note that in the image below the values appear out of that range which perhaps indicates a vibration problem although this user did not complain of AltHold or Loiter problems so it is more likely that these variations were because the copter was not in a stable hover and the update rate was low.Compass interferenceInterference from the power distribution board, motors, battery, esc and other electrical devices near the APM or PX4 can throw off the compass heading which can lead to circling (aka “toilet bowling”) or even the copter flying off in completely the wrong direction. Graphing the tlog’s mag_field (found under “CUSTOM”) and throttle (found under VFR_HUD) values are the easiest way to quickly see the amount of interference.In the graph’s below shows an acceptable amount of magnetic interference.You can see the mag_field fluctuates when the throttle is raised but only moves around by about 10% ~ 20%. Below 30% inteference is acceptable. Between 30% ~ 60% is in the grey zone where it might be ok (some users are ok, some are not) and really bad magnetic interference will show up as jumps of over 60% when the throttle is raised.Extra Notes:∙The length of the mag_field can be anywhere from 120 ~ 550 depending upon where in the world the vehicle is but it is normally around 330.∙The magnetic interference as a percentage of the total mag field is also displayed at the end of the compassmot set-up procedure.∙Dataflash log’s COMPASS message hold the compass’s raw x, y and z axis values (called MagX, MagY, MagZ) which are equivalent to the tlog’s RAW_IMU xmag, ymag and zmag fields. It’s possible to calculate the mag-field length by firstloading the dataflash log file into excel, filtering by the COMPASS message and then calculating the mag-field using the formula mag_field = sqrt(MagX^2,MagY^2, MagZ^2). Note that the COMPASS message is not enabled by defaultin the dataflash logs because it runs at 50hz and does affect CPU performance a bit.∙Another general thing to check re the compass is the offsets which should bet between -150 ~ 150. These are found in the tlog’s SENSOR_OFFSET group as mag_ofs_x, mag_ofs_y, mag_ofs_z and in the datafl ash’s COMPASS message as OfsX, OfsY, OfsZ. They can also be seen in the parametersas COMPASS_OFS_X, COMPASS_OFS_Y, COMPASS_OFS_Z.∙The image above it shows a short spike at the beginning of the graph but this can be ignored because it’s before the throttle is raised so it’s probably just as the user plugged in some other electrical device.GPS glitchesWhen in autopilot modes (Loiter, RTL, AUTO) position errors from the GPS can cause Copter to think that it’s suddenly in the wrong position and lead to aggressive flying to correct the perceived error. These “glitches” show up in both the tlogs and dataflash logs as an decrease in the number of satellites visible and an increase inthe hdop.If using tlogs graph the the you can do this by graphing the GPS_RAW_IT group’s “eph” and “satellites_visible” values.An hdop value of 1.5 (displayed as 150) or lower is very good. Over 2.0 (i.e. 200) indicates a bad position value. The number of satellites falling below 9 is also bad. A significant change in these two values often accompanies a GPS position change.In the Dataflash logs’s GPS message you will find the “HDop” and “NSats” columns. Note the hdop values are in the correct units in the dataflash (i.e. not 100x too big like in the tlogs).AC 3.1 includes GPS Glitch detection which attempts to ignore glitches by sanity checking the positions.Power Problems (BrownOuts, etc)The introduction of the 3dr power module has made it much easier for people to provide a reliable power supply to their APM/PX4. This has led to a massive reduction in the number of brown-outs reported but they do still occur. They can normally be reconised by the logs suddenly ending while the copter is still in the air (i.e. barometer or inerital navigation altitude is still well above zero).Try graphing the:∙Dataflash log’s CTUN message’s Baro Alt∙Dataflash log’s GPS message’s RelAlt (the combined accelerometer + barometer altitude estimate)∙Tlog’s VFR_HUD alt (the combined accelerometer + barometer altitude estimate)∙Tlog’s GLOBAL_POSITION relative_altChanges in the board voltage can also be a sign of a power problem. Variations of 0.10 to 0.15 volts are normal. Beyond that could be a sign that other devices sharing the power source with the APM are causing ripples in the power supply that could lead to a brown-out or other weird behaviour. The board voltage can be graphed using:∙Dataflash CURRENT message’s VCC∙Tlog HWSTATUS’s VccIn the image directly below shows the board voltage sinking by 0.15V when the throttle is raised. This is generally not a good thing but because it’s only 0.15V it’s probably ok. The 2nd graph below (a dataflash graph from a different user’s log) shows a more random variation in voltage but also up to 0.15V which is typical.Unexpected ERRORS including FailsafesWhen unexpected behaviour from the flight controller occurs (especially when the user complains that the copter no longer responded to their input) it is often caused by one of the failsafes being triggered. There are 5 failsafes that can be activated: Throttle Failsafe, GPS Failsafe, GCS Failsafe (ground station failsafe), Battery Failsafe and the Fence.The easiest way to find these is to look in the dataflash logs and filter the 1st column by “ERR”.The Subsys (aka Sub-system) gives the area that generated the error and the ECode (aka Error Code) tells you what the error was specifically. The very limited number of subsystems and error codes can be found at the bottom of the Copter defines.h file. Sub Systems / Error Codes1: Main (never used)2: RadioECode 1: “Late Frame” which means the APM’s onboard ppm encoder did not provide an update for at least 2 secondsECode 0: error resolved which means the ppm encoder started providing data again3: CompassECode 1: the compass failed to initialise (likely a hardware issue)ECode 2: failure while trying to read a single value from the compass (probably a hardware issue)ECode 0: above errors resolved4: Optical flowEcode 1: failed to initialise (likely a hardware issue)5: Throttle failsafeECode 1: throttle dropped below FS_THR_VALUE meaning likely loss of contact between RX/TXECode 0: above error resolve meaning RX/TX contact likely restored6: Battery failsafeECode 1: battery voltage dropped below LOW_VOLT or total battery capacity used exceeded BATT_CAPACITY7: GPS failsafeECode 1: GPS lock lost for at least 5 secondsECode 0: GPS lock restored8: GCS (Ground station) failsafeECode 1: updates from ground station joystick lost for at least 5 secondsECode 0: updates from ground station restored9: FenceECode 1: altitude fence breachedECode 2: circular fence breachedECode 3: both altitude and circular fences breachedECode 0: vehicle is back within the fences10: Flight ModeECode 0 ~ 10: the vehicle was unable to enter the desired flight mode(0=Stabilize, 1=Acro, 2=AltHold, 3=Auto, 4=Guided, 5=Loiter, 6=RTL, 7=Circle, 8=Position, 9=Land, 10=OF_Loiter)11: GPSECode 2: GPS GlitchECode 0: GPS Glitch cleared12: Crash CheckECode 1: Crash detected13: FlipECode 2: Flip abandoned (because of 2 second timeout)14: AutoTuneECode 2: Bad Gains (failed to determine proper gains)15: ParachuteECode 2: Too low to deploy parachute16: EKF/InertialNav Check ECode 2: Bad Variance ECode 0: Bad Variance cleared 17: EKF/InertialNav Failsafe ECode 2: EKF Failsafe triggered 18: Baro glitchECode 2: Baro glitchECode 0: Baro glitch cleared。
透过专利看微处理器的技术发展一——早期微处理器的发展历程

Semiconductor有7件专利、Fairchild
Camera
次达成专利互许可协议,因为1rI在微处理器领域持 有的专利,Intel向11付微处理器专利许可费。
and Instrument
Corporation有4件专利、Olympia有4
件专利引用了这件专利,可见该专利在微处理器领 域的中心位置,同时也说明了当时微处理器技术多 家公司鼎立的局面。这件被频繁引证的专利远远超
1.将控制部件、8位算术逻辑运算单元、8位并 行总线和16位的地址寄存器集成在一块芯片上; 2.为CPU提供了16位可编程地址存储器,包
进制计时器171、
1999年,11公司 申请的DSP处 理器问等专利奠 定了基础,甚至 也为今天DSP、
芯片设计、芯片 组设计、Soc设 计、主板设计、嵌
入式系统设计、
展,但是这些处理器无一不
是由多个独立单元构成,因 此它们都不是严格意义上的 微处理器。 醒,
2.1第一件微处理
器专利
1971年8月31日,TI为
他们研制的微处理器申请了
具有重要意义的专利,其专 利申请号为176668田。这颗微 处理器的结构如图2所示, 该系统集成了运算单元、控 制器、寄存器、总线四大部 件。将半导体芯片划分为四 个区域,运算单元、存储器、
要求从整体上反映发明的技术方案,同时记载了解 决技术问题的必要技术特征的特性。研究该专利的 独立权利要求,“1.In
includes
a a
备、控制设备集成在同一块芯片上,真正意义上实现
了微处理器的设计。
现从专利引证角度分析这篇专利。专利引证分
析是以引证为基础的专利研究,专利文献中既有专
利申请人在其专利申请中引用“现有技术”,又有审
OIML Ceftificate 证书 电磁流量计 MAG5100W DN50-300 及其附加器说
Classl
SIZE
*50 (2',J 65 (21/2")
80 (3',) 100 (4')
"R" Q3/Q1
250
250
250
250
Q1 [m3/hl
0.25
0.40
0.63
1.00
Q2 tm3/hI
0.40
0.64
1.00
1.60
Q3 Im3/hI
63
100
160
2s0
Q4 Im3/hl
78.75
1.00
1.60
2.50
4.0
Q3 [m3/hl 63
100
160
2s0
400
630
1000
Q4 [m3/h]
78.75
125
200
312.5
500
787.5
7250
250
400 4.O 6.4 1600 2000
300
200 10.0 16.0 1600 2000
The above mentioned table describe the maximum specificatíon of flow range, Other dynamic ranges are allowed if "R" is I0,25,63, 80, 100, 125, 160, 2OO, 250, 315.
The OIML Issuing Authority
Date of issue: 2072-t2-77
n
Ceftification manager
Lars Poder Examiner
apm闪存日志分析

闪存日志目录[显示]日志类型(闪存VS 数传日志)有两种方法可以记录你飞行时的数据。
尽管两种记录方法十分类似,但也有些区别:∙闪存日志(本页的主题)飞行完成后,可以从APM或PX4的板载闪存上下载。
飞机和地面车辆,只要一开机就会自动创建闪存日志。
四轴上则是解锁后才创建闪存日志。
∙数传日志(也称为―tlogs‖)用3DR或XBee数传模块连接APM到电脑上,会被Mission Planner(或其他地面站)记录下来。
你可以在这里找到详细信息。
设置你想要记录的数据LOG_BITMASK参数控制闪存内记录什么类型的数据。
如果你想指定某个消息类型附加到默认的方法上,在Mission Planner标准参数列表页面,可以在Log Bitmask的下拉列表设置。
使用终端控制会更加方便(命令行界面),如下所示:∙进入Mission Planner的终端界面∙单击―连接APM‖或―连接PX‖∙键入logs∙启用或禁用某个消息类型,在enable或disable后输入信息的类型即可。
如:enable IMU用于Arducopter的所有可能的闪存信息:ATT:roll,pitch和yaw(启用ATTITUDE_FAST记录频率是50Hz,启用ATTITUDE_MED记录频率是10HZ)。
ATUN:自动调参概览(从开头记录每一次―晃动‖测试)ATDE:自动调参详情(以100HZ记录飞行器的晃动情况)CAMERA(相机):快门按下后,记录当时的GPS时间、roll、pitch、yaw、纬度、精度、高度。
CMD(命令):从地面站接收命令,或者作为执行任务之一。
COMPASS(罗盘):罗盘原始数据和compassmot补偿值。
CURRENT(电流):以10HZ的频率,记录电流和主板电压信息。
CUTN:油门和高度信息,包括油门输入大小、超声波测得的高度(sonar alt)、气压测得的高度(baro alt),以10HZ频率记录。
yantubbs-The hardening soil model, Formulation and verification

The hardening soil model: Formulation and verificationT. SchanzLaboratory of Soil Mechanics, Bauhaus-University Weimar, GermanyP.A. VermeerInstitute of Geotechnical Engineering, University Stuttgart, GermanyP.G. BonnierP LAXIS B.V., NetherlandsKeywords: constitutive modeling, HS-model, calibration, verificationABSTRACT: A new constitutive model is introduced which is formulated in the framework of classical theory of plasticity. In the model the total strains are calculated using a stress-dependent stiffness, different for both virgin loading and un-/reloading. The plastic strains are calculated by introducing a multi-surface yield criterion. Hardening is assumed to be isotropic depending on both the plastic shear and volumetric strain. For the frictional hardening a non-associated and for the cap hardening an associated flow rule is assumed.First the model is written in its rate form. Therefor the essential equations for the stiffness mod-ules, the yield-, failure- and plastic potential surfaces are given.In the next part some remarks are given on the models incremental implementation in the P LAXIS computer code. The parameters used in the model are summarized, their physical interpre-tation and determination are explained in detail.The model is calibrated for a loose sand for which a lot of experimental data is available. With the so calibrated model undrained shear tests and pressuremeter tests are back-calculated.The paper ends with some remarks on the limitations of the model and an outlook on further de-velopments.1INTRODUCTIONDue to the considerable expense of soil testing, good quality input data for stress-strain relation-ships tend to be very limited. In many cases of daily geotechnical engineering one has good data on strength parameters but little or no data on stiffness parameters. In such a situation, it is no help to employ complex stress-strain models for calculating geotechnical boundary value problems. In-stead of using Hooke's single-stiffness model with linear elasticity in combination with an ideal plasticity according to Mohr-Coulomb a new constitutive formulation using a double-stiffness model for elasticity in combination with isotropic strain hardening is presented.Summarizing the existing double-stiffness models the most dominant type of model is the Cam-Clay model (Hashiguchi 1985, Hashiguchi 1993). To describe the non-linear stress-strain behav-iour of soils, beside the Cam-Clay model the pseudo-elastic (hypo-elastic) type of model has been developed. There an Hookean relationship is assumed between increments of stress and strain and non-linearity is achieved by means of varying Young's modulus. By far the best known model of this category ist the Duncan-Chang model, also known as the hyperbolic model (Duncan & Chang 1970). This model captures soil behaviour in a very tractable manner on the basis of only two stiff-ness parameters and is very much appreciated among consulting geotechnical engineers. The major inconsistency of this type of model which is the reason why it is not accepted by scientists is that, in contrast to the elasto-plastic type of model, a purely hypo-elastic model cannot consistently dis-tinguish between loading and unloading. In addition, the model is not suitable for collapse load computations in the fully plastic range.12These restrictions will be overcome by formulating a model in an elasto-plastic framework in this paper. Doing so the Hardening-Soil model, however, supersedes the Duncan-Chang model by far. Firstly by using the theory of plasticity rather than the theory of elasticity. Secondly by includ-ing soil dilatancy and thirdly by introducing a yield cap.In contrast to an elastic perfectly-plastic model, the yield surface of the Hardening Soil model is not fixed in principal stress space, but it can expand due to plastic straining. Distinction is made between two main types of hardening, namely shear hardening and compression hardening. Shear hardening is used to model irreversible strains due to primary deviatoric loading. Compression hardening is used to model irreversible plastic strains due to primary compression in oedometer loading and isotropic loading.For the sake of convenience, restriction is made in the following sections to triaxial loading conditions with 2σ′ = 3σ′ and 1σ′ being the effective major compressive stress.2 CONSTITUTIVE EQUATIONS FOR STANDARD DRAINED TRIAXIAL TESTA basic idea for the formulation of the Hardening-Soil model is the hyperbolic relationship be-tween the vertical strain ε1, and the deviatoric stress, q , in primary triaxial loading. When subjected to primary deviatoric loading, soil shows a decreasing stiffness and simultaneously irreversible plastic strains develop. In the special case of a drained triaxial test, the observed relationship be-tween the axial strain and the deviatoric stress can be well approximated by a hyperbola (Kondner& Zelasko 1963). Standard drained triaxial tests tend to yield curves that can be described by:The ultimate deviatoric stress, q f , and the quantity q a in Eq. 1 are defined as:The above relationship for q f is derived from the Mohr-Coulomb failure criterion, which involves the strength parameters c and ϕp . As soon as q = q f , the failure criterion is satisfied and perfectly plastic yielding occurs. The ratio between q f and q a is given by the failure ratio R f , which should obviously be smaller than 1. R f = 0.9 often is a suitable default setting. This hyperbolic relationship is plotted in Fig. 1.2.1 Stiffness for primary loadingThe stress strain behaviour for primary loading is highly nonlinear. The parameter E 50 is the con-fining stress dependent stiffness modulus for primary loading. E 50is used instead of the initial modulus E i for small strain which, as a tangent modulus, is more difficult to determine experimen-tally. It is given by the equation:ref E 50is a reference stiffness modulus corresponding to the reference stress ref p . The actual stiff-ness depends on the minor principal stress, 3σ′, which is the effective confining pressure in a tri-axial test. The amount of stress dependency is given by the power m . In order to simulate a loga-rithmic stress dependency, as observed for soft clays, the power should be taken equal to 1.0. As a3Figure 1. Hyperbolic stress-strain relation in primary loading for a standard drained triaxial test.secant modulus ref E 50 is determined from a triaxial stress-strain-curve for a mobilization of 50% ofthe maximum shear strength q f .2.2 Stiffness for un-/reloadingFor unloading and reloading stress paths, another stress-dependent stiffness modulus is used:where ref urE is the reference Young's modulus for unloading and reloading, corresponding to the reference pressure σ ref . Doing so the un-/reloading path is modeled as purely (non-linear) elastic.The elastic components of strain εe are calculated according to a Hookean type of elastic relation using Eqs. 4 + 5 and a constant value for the un-/reloading Poisson's ratio υur .For drained triaxial test stress paths with σ2 = σ3 = constant, the elastic Young's modulus E ur re-mains constant and the elastic strains are given by the equations:Here it should be realised that restriction is made to strains that develop during deviatoric loading,whilst the strains that develop during the very first stage of the test are not considered. For the first stage of isotropic compression (with consolidation), the Hardening-Soil model predicts fully elastic volume changes according to Hooke's law, but these strains are not included in Eq. 6.2.3 Yield surface, failure condition, hardening lawFor the triaxial case the two yield functions f 12 and f 13 are defined according to Eqs. 7 and 8. Here4Figure 2. Successive yield loci for various values of the hardening parameter γ p and failure surface.the measure of the plastic shear strain γ p according to Eq. 9 is used as the relevant parameter forthe frictional hardening:with the definitionIn reality, plastic volumetric strains p υε will never be precisely equal to zero, but for hard soils plastic volume changes tend to be small when compared with the axial strain, so that the approxi-mation in Eq. 9 will generally be accurate.For a given constant value of the hardening parameter, γ p , the yield condition f 12 = f 13 = 0 can be visualised in p'-q-plane by means of a yield locus. When plotting such yield loci, one has to use Eqs. 7 and 8 as well as Eqs. 3 and 4 for E 50 and E ur respectively. Because of the latter expressions,the shape of the yield loci depends on the exponent m . For m = 1.0 straight lines are obtained, but slightly curved yield loci correspond to lower values of the exponent. Fig. 2 shows the shape of successive yield loci for m = 0.5, being typical for hard soils. For increasing loading the failure sur-faces approach the linear failure condition according to Eq. 2.2.4 Flow rule, plastic potential functionsHaving presented a relationship for the plastic shear strain, γ p , attention is now focused on the plastic volumetric strain p υε. As for all plasticity models, the Hardening-Soil model involves a re-lationship between rates of plastic strain, i.e. a relationship between p υε and p γ . This flow rule hasthe linear form:5Clearly, further detail is needed by specifying the mobilized dilatancy angle m ψ. For the presentmodel, the expression:is adopted, where cv ϕ is the critical state friction angle, being a material constant independent ofdensity (Schanz & Vermeer 1996), and m ϕ is the mobilized friction angle:The above equations correspond to the well-known stress-dilatancy theory (Rowe 1962, Rowe 1971), as explained by (Schanz & Vermeer 1996). The essential property of the stress-dilatancy theory is that the material contracts for small stress ratios m ϕ < cv ϕ, whilst dilatancy occurs for high stress ratios m ϕ < cv ϕ. At failure, when the mobilized friction angle equals the failure angle,p ϕ, it is found from Eq. 11 that:Hence, the critical state angle can be computed from the failure angles p ϕand p ψ. The above defi-nition of the flow rule is equivalent to the definition of definition of the plastic potential functionsg 12 and g 13 according to:Using theKoiter-rule (Koiter 1960) for yielding depending on two yield surfaces (Multi-surface plasticity ) one finds:Calculating the different plastic strain rates by this equation, Eq. 10 directly follows.3 TIME INTEGRATIONThe model as described above has been implemented in the finite element code P LAXIS (Vermeer& Brinkgreve 1998). To do so, the model equations have to be written in incremental form. Due to this incremental formulation several assumptions and modifications have to be made, which will be explained in this section.During the global iteration process, the displacement increment follows from subsequent solu-tion of the global system of equations:where K is the global stiffness matrix in which we use the elastic Hooke's matrix D , f ext is a global load vector following from the external loads and f int is the global reaction vector following from the stresses. The stress at the end of an increment σ 1 can be calculated (for a given strain increment ∆ε) as:6whereσ0 , stress at the start of the increment,∆σ , resulting stress increment,4D , Hooke's elasticity matrix, based on the unloading-reloading stiffness,∆ε , strain increment (= B ∆u ),γ p , measure of the plastic shear strain, used as hardening parameter,∆Λ , increment of the non-negative multiplier,g , plastic potential function.The multiplier Λ has to be determined from the condition that the function f (σ1, γ p ) = 0 has to be zero for the new stress and deformation state.As during the increment of strain the stresses change, the stress dependant variables, like the elasticity matrix and the plastic potential function g , also change. The change in the stiffness during the increment is not very important as in many cases the deformations are dominated by plasticity.This is also the reason why a Hooke's matrix is used. We use the stiffness matrix 4D based on the stresses at the beginning of the step (Euler explicit ). In cases where the stress increment follows from elasticity alone, such as in unloading or reloading, we iterate on the average stiffness during the increment.The plastic potential function g also depends on the stresses and the mobilized dilation angle m ψ. The dilation angle for these derivatives is taken at the beginning of the step. The implementa-tion uses an implicit scheme for the derivatives of the plastic potential function g . The derivatives are taken at a predictor stress σtr , following from elasticity and the plastic deformation in the previ-ous iteration:The calculation of the stress increment can be performed in principal stress space. Therefore ini-tially the principal stresses and principal directions have to be calculated from the Cartesian stresses, based on the elastic prediction. To indicate this we use the subscripts 1, 2 and 3 and have 321σσσ≥≥ where compression is assumed to be positive.Principal plastic strain increments are now calculated and finally the Cartesian stresses have to be back-calculated from the resulting principal constitutive stresses. The calculation of the consti-tutive stresses can be written as:From this the deviatoric stress q (σ1 – σ3) and the asymptotic deviatoric stress q a can be expressed in the elastic prediction stresses and the multiplier ∆Λ:7whereFor these stresses the functionshould be zero. As the increment of the plastic shear strain ∆γ p also depends linearly on the multi-plier ∆Λ, the above formulae result in a (complicated) quadratic equation for the multiplier ∆Λwhich can be solved easily. Using the resulting value of ∆Λ, one can calculate (incremental)stresses and the (increment of the) plastic shear strain.In the above formulation it is assumed that there is a single yield function. In case of triaxial compression or triaxial extension states of stress there are two yield functions and two plastic po-tential functions. Following (Koiter 1960) one can write:where the subscripts indicate the principal stresses used for the yield and potential functions. At most two of the multipliers are positive. In case of triaxial compression we have σ2 = σ3, Λ23 = 0and we use two consistency conditions instead of one as above. The increment of the plastic shear strain has to be expressed in the multipliers. This again results in a quadratic equation in one of the multipliers.When the stresses are calculated one still has to check if the stress state violates the yield crite-rion q ≤ q f . When this happens the stresses have to be returned to the Mohr-Coulomb yield surface.4 ON THE CAP YIELD SURFACEShear yield surfaces as indicated in Fig. 2 do not explain the plastic volume strain that is measured in isotropic compression. A second type of yield surface must therefore be introduced to close the elastic region in the direction of the p-axis. Without such a cap type yield surface it would not be possible to formulate a model with independent input of both E 50 and E oed . The triaxial modulus largely controls the shear yield surface and the oedometer modulus controls the cap yield surface.In fact, ref E 50largely controls the magnitude of the plastic strains that are associated with the shear yield surface. Similarly, ref oedE is used to control the magnitude of plastic strains that originate from the yield cap. In this section the yield cap will be described in full detail. To this end we consider the definition of the cap yield surface (a = c cot ϕ):8where M is an auxiliary model parameter that relates to NC K 0 as will be discussed later. Further more we have p = (σ1 + σ2+ σ3) andwithq is a special stress measure for deviatoric stresses. In the special case of triaxial compression it yields q = (σ1 – σ3) and for triaxial extension reduces to q = α (σ1 –σ3). For yielding on the cap surface we use an associated flow rule with the definition of the plastic potential g c :The magnitude of the yield cap is determined by the isotropic pre-consolidation stress p c . For the case of isotropic compression the evolution ofp c can be related to the plastic volumetric strain rate p v ε:Here H is the hardening modulus according to Eq. 32, which expresses the relation between theelastic swelling modulus K s and the elasto-plastic compression modulus K c for isotropic compres-sion:From this definition follows a stress dependency of H . For the case of isotropic compression we haveq = 0 and therefor c p p=. For this reason we find Eq. 33 directly from Eq. 31:The plastic multiplier c Λ referring to the cap is determined according to Eq. 35 using the addi-tional consistency condition:Using Eqs. 33 and 35 we find the hardening law relating p c to the volumetric cap strain c v ε:9Figure 3. Representation of total yield contour of the Hardening-Soil model in principal stress space for co-hesionless soil.The volumetric cap strain is the plastic volumetric strain in isotropic compression. In addition to the well known constants m and σref there is another model constant H . Both H and M are cap pa-rameters, but they are not used as direct input parameters. Instead, we have relationships of theform NC K 0=NC K 0(..., M, H ) and ref oed E = ref oed E (..., M, H ), such that NC K 0and ref oed E can be used as in-put parameters that determine the magnitude of M and H respectively. The shape of the yield cap is an ellipse in p – q ~-plane. This ellipse has length p c + a on the p -axis and M (p c+ a ) on the q ~-axis.Hence, p c determines its magnitude and M its aspect ratio. High values of M lead to steep caps un-derneath the Mohr-Coulomb line, whereas small M -values define caps that are much more pointed around the p -axis.For understanding the yield surfaces in full detail, one should consider Fig. 3 which depicts yield surfaces in principal stress space. Both the shear locus and the yield cap have the hexagonal shape of the classical Mohr-Coulomb failure criterion. In fact, the shear yield locus can expand up to the ultimate Mohr-Coulomb failure surface. The cap yield surface expands as a function of the pre-consolidation stress p c .5 PARAMETERS OF THE HARDENING-SOIL MODELSome parameters of the present hardening model coincide with those of the classical non-hardening Mohr-Coulomb model. These are the failure parameters ϕp ,, c and ψp . Additionally we use the ba-sic parameters for the soil stiffness:ref E 50, secant stiffness in standard drained triaxial test,ref oedE , tangent stiffness for primary oedometer loading and m , power for stress-level dependency of stiffness.This set of parameters is completed by the following advanced parameters:ref urE , unloading/ reloading stiffness,10v ur , Poisson's ratio for unloading-reloading,p ref , reference stress for stiffnesses,NC K 0, K 0-value for normal consolidation andR f , failure ratio q f / q a .Experimental data on m , E 50 and E oed for granular soils is given in (Schanz & Vermeer 1998).5.1 Basic parameters for stiffnessThe advantage of the Hardening-Soil model over the Mohr-Coulomb model is not only the use of a hyperbolic stress-strain curve instead of a bi-linear curve, but also the control of stress level de-pendency. For real soils the different modules of stiffness depends on the stress level. With theHardening-Soil model a stiffness modulus ref E 50is defined for a reference minor principal stress of σ3 = σref . As some readers are familiar with the input of shear modules rather than the above stiff-ness modules, shear modules will now be discussed. Within Hooke's theory of elasticity conversion between E and G goes by the equation E = 2 (1 + v ) G . As E ur is a real elastic stiffness, one may thus write E ur = 2 (1 + v ur ) G ur , where G ur is an elastic shear modulus. In contrast to E ur , the secant modulus E 50 is not used within a concept of elasticity. As a consequence, there is no simple conver-sion from E 50 to G 50. In contrast to elasticity based models, the elasto-plastic Hardening-Soil model does not involve a fixed relationship between the (drained) triaxial stiffness E 50 and the oedometer stiffness E oed . Instead, these stiffnesses must be given independently. To define the oedometer stiff-ness we usewhere E oed is a tangent stiffness modulus for primary loading. Hence, ref oed E is a tangent stiffness ata vertical stress of σ1 = σref .5.2 Advanced parametersRealistic values of v ur are about 0.2. In contrast to the Mohr-Coulomb model, NC K 0 is not simply a function of Poisson's ratio, but a proper input parameter. As a default setting one can use the highly realistic correlation NC K 0= 1 – sin ϕp . However, one has the possibility to select different values.All possible different input values for NC K 0 cannot be accommodated for. Depending on other pa-rameters, such as E 50, E oed , E ur and v ur , there happens to be a lower bound on NC K 0. The reason for this situation will be explained in the next section.5.3 Dilatancy cut-offAfter extensive shearing, dilating materials arrive in a state of critical density where dilatancy has come to an end. This phenomenon of soil behaviour is included in the Hardening-Soil model by means of a dilatancy cut-off . In order to specify this behaviour, the initial void ratio, e 0, and the maximum void ratio, e cv , of the material are entered. As soon as the volume change results in a state of maximum void, the mobilized dilatancy angle, ψm , is automatically set back to zero, as in-dicated in Eq. 38 and Fig. 4:11Figure 4. Resulting strain curve for a standard drained triaxial test including dilatancy cut-off.The void ratio is related to the volumetric strain, εv by the relationship:where an increment of εv is negative for dilatancy. The initial void ratio, e 0, is the in-situ void ratio of the soil body. The maximum void ratio, e cv , is the void ratio of the material in a state of critical void (critical state).6 CALIBRATION OF THE MODELIn a first step the Hardening-Soil model was calibrated for a sand by back-calculating both triaxial compression and oedometer tests. Parameters for the loosely packed Hostun-sand (e 0 = 0.89), a well known granular soil in geotechnical research, are given in Tab. 1. Figs. 5 and 6 show the satis-fying comparison between the experimental (three different tests) and the numerical result. For the oedometer tests the numerical results consider the unloading loop at the maximum vertical load only.7 VERIFICATION OF THE MODEL7.1 Undrained behaviour of loose Hostun-sandIn order to verify the model in a first step two different triaxial compression tests on loose Hostun-sand under undrained conditions (Djedid 1986) were simulated using the identical parameter from the former calibration. The results of this comparison are displayed in Figs. 7 and 8.In Fig. 7 we can see that for two different confining pressures of σc = 300 and 600 kPa the stress paths in p-q-space coincide very well. For deviatoric loads of q ≈ 300 kPa excess porewater pres-sures tend to be overestimated by the calculations.Additionally in Fig. 8 the stress-strain-behaviour is compared in more detail. This diagram con-tains two different sets of curves. The first set (•, ♠) relates to the axial strain ε1 at the horizontal12Figure 5. Comparison between the numerical (•) and experimental results for the oedometer tests.Figure 6. Comparison between the numerical (•) and experimental results for the drained triaxial tests (σ3 = 300 kPa) on loose Hostun-sand.and the effective stress ratio 31/σσ′′ on the vertical (left) axis. The second set (o , a ) refers to the normalised excess pore water pressure ∆u /σc on the right vertical axis. Experimental results forboth confining stresses are marked by symbols, numerical results by straight and dotted lines.Analysing the amount of effective shear strength it can be seen that the maximum calculated stress ratio falls inside the range of values from the experiments. The variation of effective friction from both tests is from 33.8 to 35.4 degrees compared to an input value of 34 degrees. Axial stiff-ness for a range of vertical strain of ε1 < 0.05 seems to be slightly over-predicted by the model. Dif-ferences become more pronounced for the comparison of excess pore water pressure generation.Here the calculated maximum amount of ∆u is higher then the measured values. The rate of de-crease in ∆u for larger vertical strain falls in the range of the experimental data.Table 1. Parameters of loose Hostun-sand.v urm ϕp ψp ref ref s E E 50/ref ref ur E E 50/ref E 500.200.6534° 0° 0.8 3.0 20 MPa13Figure 7. Undrained behaviour of loose Hostun-sand: p-q-plane.Figure 8. Undrained behaviour of loose Hostun-sand: stress-strain relations.7.2 Pressuremeter test GrenobleThe second example to verify the Hardening-Soil model is a back-calculation of a pressuremeter test on loose Hostun-sand. This test is part of an experimental study using the calibration chamber at the IMG in Grenoble (Branque 1997). This experimental testing facility is shown in Fig. 9.The cylindrical calibration chamber has a height of 150 cm and a diameter of 120 cm. In the test considered in the following a vertical surcharge of 500 kPa is applied at the top of the soil mass by a membrane. Because of the radial deformation constraint the state of stress can be interpreted in this phase as under oedometer conditions. Inside the chamber a pressuremeter sonde of a radius r 0 of 2.75 cm and a length of 16 cm is placed. For the test considered in the following example there was loose Hostun-sand (D r ≈ 0.5) of a density according to the material parameters as shown in Tab. 1 placed around the pressuremeter by pluviation. After the installation of the device and the filling of the chamber the pressure is increased and the resulting volume change is registered.14Figure 9. Pressuremeter Grenoble .This experimental setup was modeled within a FE-simulation as shown in Fig. 10. On the left hand side the axis-symmetric mesh and its boundary conditions is displayed. The dimensions are those of the complete calibration chamber. In the left bottom corner of the geometry the mesh is finer because there the pressuremeter is modeled.In the first calculation phase the vertical surcharge load A is applied. At the same time the hori-zontal load B is increased the way practically no deformations occur at the free deformation bound-ary in the left bottom corner. In the second phase the load group A is kept constant and the load group B is increased according to the loading history in the experiment. The (horizontal) deforma-tions are analysed over the total height of the free boundary. In order to (partly) get rid of the de-formation constrains at the top of this boundary, marked point A in the detail on the right hand side of Fig. 10 two interfaces were placed crossing each other in point A . Fig. 11 shows the comparison of the experimental and numerical results for the test with a vertical surcharge of 500 kPa.On the vertical axis the pressure (relating to load group B ) is given and on the horizontal axis the volumetric deformation of the pressuremeter. Because the calculation was run taking into ac-count large deformations (updated mesh analysis ) the pressure p in the pressuremeter has to be cal-culated from load multiplier ΣLoad B according to Eq. 40, taking into account the mean radial de-formation ∆r of the free boundary:The agreement between the experimental and the numerical data is very good, both for the initial part of phase 2 and for larger deformations of up to 30%.。
机械英语考试试题及答案
机械英语考试试题及答案一、选择题(每题2分,共20分)1. The term "mechanical engineering" refers to:A. The study of machinesB. The design and manufacture of mechanical systemsC. The operation of machineryD. The maintenance of mechanical equipment答案:B2. What is the function of a bearing in a mechanical system?A. To reduce frictionB. To increase efficiencyC. To provide powerD. To transmit motion答案:A3. The process of converting thermal energy into mechanical energy is known as:A. ElectrificationB. CombustionC. ThermodynamicsD. Hydrodynamics答案:C4. In mechanical design, the principle of "KISS" stands for:A. Keep It Simple, StupidB. Keep It Short and SimpleC. Keep It Simple and SafeD. Keep It Simple, Smart答案:A5. A gear train is used to:A. Change the direction of motionB. Increase the speed of rotationC. Decrease the speed of rotationD. All of the above答案:D6. What does CAD stand for in mechanical engineering?A. Computer-Aided DesignB. Computer-Aided DraftingC. Computer-Aided DevelopmentD. Computer-Aided Diagnostics答案:A7. The SI unit for force is:A. NewtonB. JouleC. PascalD. Watt答案:A8. What is the purpose of a flywheel in a mechanical system?A. To store energyB. To increase speedC. To reduce noiseD. To dissipate heat答案:A9. The term "hydraulics" is associated with the study of:A. Fluid dynamicsB. Solid mechanicsC. Structural analysisD. Thermal engineering答案:A10. The process of cutting a material to a specific shape is known as:A. MachiningB. CastingC. ForgingD. Extrusion答案:A二、填空题(每空1分,共10分)11. The formula for calculating the moment of a force is \( F \times d \), where \( F \) is the force and \( d \) is the_______.答案:distance from the pivot12. A _______ is a device that converts linear motion into rotational motion.答案:crank13. In a four-stroke internal combustion engine, the four strokes are intake, compression, _______, and exhaust.答案:power14. The _______ of a material is its ability to resist deformation under load.答案:stiffness15. The term "overhaul" in mechanical maintenance refers to a thorough inspection and _______ of a machine or its parts.答案:repair16. The _______ of a machine is the study of how forces act on and within a body.答案: statics17. A _______ is a type of machine that uses a screw to convert rotational motion into linear motion.答案:screw jack18. The _______ of a system is the point around which the system rotates.答案:pivot19. The _______ of a lever is the ratio of the effort arm to the load arm.答案:mechanical advantage20. The _______ is a type of bearing that allows for rotation with minimal friction.答案:ball bearing三、简答题(每题5分,共30分)21. Explain the difference between static and dynamic equilibrium in mechanical systems.答案:Static equilibrium refers to a state where the net force and net moment acting on a body are zero, resulting in no acceleration. Dynamic equilibrium occurs when the net force is zero, but the body is in motion with constant velocity.22. What is the purpose of a clutch in a vehicle?答案:A clutch is used to engage and disengage the power transmission from the engine to the transmission system, allowing the vehicle to start, stop, and change gears smoothly.23. Describe the function of a governor in an engine.答案:A governor is a device that automatically controls the speed of an engine by regulating the fuel supply or the valve settings, ensuring the engine operates within safespeed limits.24. What are the three primary types of joints in structural engineering?答案:The three primary types of joints are pinned joints, fixed joints, and sliding joints, each serving different purposes in connecting and supporting structural elements.25. Explain the。