基于神经网络的高速无人艇模糊PID控制
基于模糊RBF神经网络的PID控制方法及应用
基于模糊RBF神经网络的PID控制方法及应用潘玉成;林鹤之;陈小利;吕仙银【摘要】针对常规PID控制参数固定难于满足时变不确定非线性系统的控制要求,利用模糊控制的良好收敛性和对模糊量的运算优势,以及神经网络自学习、自适应的特性,将常规PID控制与模糊控制、神经网络结合起来,提出一种基于模糊RBF神经网络的PID控制方法,实现了对PID参数的实时在线整定.将算法运用到柴油发电机调速系统的PID参数寻优中,MAT-LAB仿真试验结果表明,模糊RBF神经网络的PID控制具有更好的动静态特性和抗干扰性能,提高了对非线性时变被控对象的控制效果.【期刊名称】《机械制造与自动化》【年(卷),期】2019(048)003【总页数】5页(P215-219)【关键词】模糊RBF神经网络;PID控制;参数整定;MATLAB仿真【作者】潘玉成;林鹤之;陈小利;吕仙银【作者单位】宁德职业技术学院机电工程系,福建福安355000;福建省闽东卫生学校,福建福安355017;宁德职业技术学院信息技术与工程系,福建福安355000;宁德职业技术学院机电工程系,福建福安355000【正文语种】中文【中图分类】TP1830 引言PID控制(比例、积分和微分控制)是工业过程控制中应用较为广泛的控制策略之一,具有算法简单、容易实现及可靠性高等特点,适用于可建立精确数学模型的确定性系统,而实际工业生产中的控制系统大都存在严重的时变性、滞后性、非线性和现场干扰等,难于建立精确的数学模型,采用常规PID控制已无法满足系统的控制要求。
针对常规PID控制由于参数不能在线自整定,对非线性时变对象无法取得好的控制效果,目前已有学者将智能控制技术应用于常规PID控制[1-6]。
模糊控制无需建立被控对象精确的数学模型,以模糊集合理论为基础,凭借专家知识、人工经验制定规则,利用模糊逻辑推理方法,实现对被控对象的智能控制,具有良好的鲁棒性和适应性,但确定其模糊规则和隶属度函数依赖于经验,缺乏自学习能力。
基于模糊神经网络PID控制器的EEC数字化设计

受上述文献的启发$本文以低压压气机导流叶片
收稿日期!!"#& (#" (!# 作者简介!肖磊"#))*#$男$湖南人$硕士研究生$中尉$主要 研究方向为航空发动机控制% 检测与故障诊断& 杨纪明 "#)+%#$男$湖南人$博士$副教授$主要研究方向为航空发动
调节通道为具体对象$在神经网络,-.控制的基础上 结合模糊理论充分利用专家经验知识的优势$解决了 传统控制器参数在线调整存在的不足$使控制器获得 更好的控制效果$为模拟式控制器数字化改造升级提
''电子控制器是某型航空发动机控制的核心部件$ 工蚁群算法的,-.控制器参数自整定方法优化控制性
数字电子控制器具有传统模拟式电子控制器无法比拟 能$结果显示优化效果良好&文献(%)提出一种基于模
的优势(#)' 实现电子控制器的数字化$是下一代航空 糊自整定航空发动机,-.控制器参数优化方法$克服
发动机控制器发展的方向' 现役的大部分军机还在使 了传统,-.控制参数不易整定的缺点$获得最佳发动
主要研究对象$提出一种模糊神经网络,-.控制器$将模糊控制%神经网络%,-.控制相结合$利用模糊
控制专家经验优势和神经网络的自学习%自适应能力$优化,-.控制参数$实现控制性能提升' 仿真结
果显示$基于模糊神经网络的,-.控制器控制性能有较大提高$具有比常规神经网络,-.控制器更小的
超调量和更好的抗干扰性&适用于定常系统和非定常系统$具有更好的自适应性与鲁棒性&可应用于航
''发动机低压压气机导流叶片调节系统的主调节系 统电子+++液压机械调节系统$根据低压转子换算转
关于基于深度学习技术的模糊自适应PID控制方法

关于基于深度学习技术的模糊自适应PID控制方法近年来,深度学习技术在各个领域得到了广泛的应用,其在控制算法领域中也获得了不少关注。
PID控制器是最基本、最常用的控制器,而模糊PID控制则可以在更广泛的动态环境下实现优良的控制性能。
而基于深度学习技术的模糊自适应PID控制方法在PID控制器的基础之上进行了改进,在实际应用中具有更高的可靠性和更好的性能。
一、基于深度学习的PID控制PID控制器利用误差与积分、微分值的比例关系不断地调整输出控制量,使被控制对象达到所期望的状态。
在传统的PID控制器中,比例、积分、微分系数是固定不变的,因此当受控对象的环境变化或负载变化时,控制器就无法适应参数变化。
为了弥补PID控制器在适应变化环境方面存在的问题,模糊PID控制器应运而生。
模糊PID控制器是将传统的PID控制器中三个系数改为模糊化系数,并利用模糊控制中的专家经验与经验法则来调节模糊化系数。
模糊PID控制器可以使用人工经验法则来调节模糊化系数,也可以通过进行基于模型的强化学习方法来进行跟踪控制。
然而,即使模糊PID控制器采用了模糊化系数来适应环境变化,其控制性能仍存在瓶颈,因为模糊化系数在不同工况下不能做到自适应。
此时,基于深度学习技术的模糊自适应PID控制方法可以处理这些不可预测和变化的干扰,从而实现更强大的鲁棒性。
二、基于深度学习的模糊自适应PID控制方法基于深度学习的模糊自适应PID控制是一种通过深度学习网络自适应地控制PID参数的方法。
与传统的PID控制器不同,该方法采用神经网络作为控制器,利用深度学习算法来提高控制器的自适应性和鲁棒性。
此外,该方法还利用模糊控制法来处理由系统环境和负载变化带来的复杂干扰。
一般情况下,基于深度学习的模糊自适应PID控制方法可以分为以下几个步骤:1. 收集系统数据和环境变化数据,基于这些数据训练深度学习网络,学习对于不同干扰模式的响应。
2. 利用模糊控制法调节PID的三个模糊化系数,让其适应不同工况下的控制需求。
基于模糊神经网络的智能优化PID控制器研究的开题报告

基于模糊神经网络的智能优化PID控制器研究的开题报告题目:基于模糊神经网络的智能优化PID控制器研究研究背景:PID控制器是一种经典的控制器,具有计算简单、易于实现、稳定性好等优点,广泛应用于工业控制系统中。
但是,传统的PID控制器存在参数难以确定、适应性不强等问题,难以满足某些特定的控制需求。
因此,如何提高PID控制器的性能一直是研究的热点。
研究内容:本研究旨在探究基于模糊神经网络的智能优化PID控制器。
具体研究内容如下:1. 分析PID控制器的特点及存在的问题。
2. 分析模糊神经网络的原理及优点。
3. 建立基于模糊神经网络的智能优化PID控制模型。
4. 根据实际需求设计模糊神经网络的输入输出变量,并训练网络。
5. 在仿真平台上验证该控制方法的性能,对比传统PID控制器的控制效果。
研究意义:本研究将探究基于模糊神经网络的智能优化PID控制方法,具有以下意义:1. 提高PID控制器的性能,使得控制更加准确、稳定。
2. 增强PID控制器的适应性,使得其能够应对更加复杂的控制需求。
3. 推广模糊神经网络在控制领域的应用,为智能控制技术的发展做出贡献。
研究方法:本研究采用理论分析与仿真实验相结合的方法,具体研究流程如下:1. 对PID控制器进行理论分析,分析其特点及存在的问题。
2. 学习模糊神经网络原理,设计模型并进行模拟实验。
3. 设计仿真实验,对比模糊神经网络优化PID控制器与传统PID控制器的控制效果。
研究计划:本研究预计分为以下几个阶段:1. 第一阶段:研究PID控制器原理,了解控制器的特点及存在的问题。
2. 第二阶段:学习模糊神经网络原理,设计模型并进行模拟实验。
3. 第三阶段:设计仿真实验,对比模糊神经网络优化PID控制器与传统PID控制器的控制效果。
4. 第四阶段:进行实验数据分析,撰写论文。
研究预期成果:1. 提出基于模糊神经网络的智能优化PID控制方法。
2. 仿真实验验证该控制方法的有效性。
基于模糊-RBF神经网络优化的PID控制
假设一个非线性被控对象的数学模型为:
y㈤=业错专邕笋业
(1)采用RBF神经网络优化参数的PIT)控制仿 真
单独采用RBF神经网络优化的PID控制,仿真 的阶跃响应曲线如图3中点划线所示。
(2)采用模糊RBF神经网络优化的PID控制的 仿真
网络的结构取2—5—5—3的形式,输入信号为 指令信号和对象的实际输出,针对每个输入取5个 模糊集进行模糊化,即n=2,N=5,网络学习参数 取≈=0.2,a=0.02。网络的初始权值及隶属函数 参数初值通过实验得到。仿真结果如图3中实线所 示:
网络权值的学习算法如下:
她(女)=口·(删£(^)一一”(女))·逊aAu·砑a,Su·瓦af4
=々‘(删(^)一砌(^))‘挚(J),3(j)
万方数据
墨!塑
塾兰!叁主壅麴二曼塑塑丝旦整垡些堕塑望苎墅
:!!:
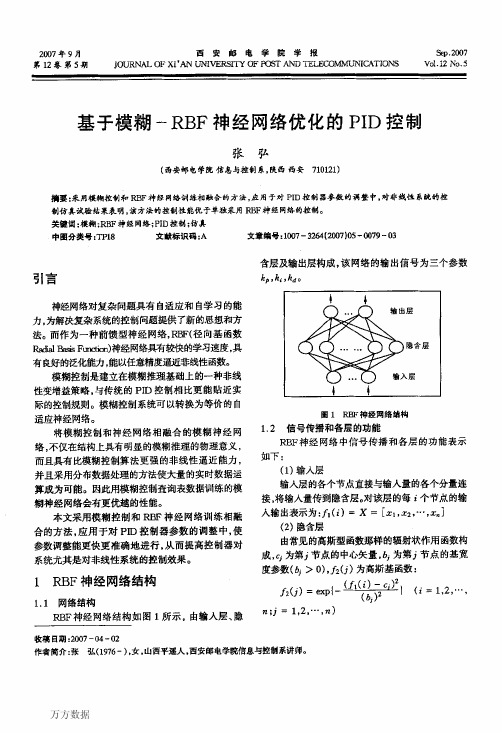
圈2模糊RBF神经网络结构
式中,m,为网络输出节点与上一层各节点的连接 权,J=1,2,…N,口为学习速率。如果考虑动量因 子,输出层的权值为:
用模糊控制查询表数据训练的模糊RBF神经 网络能加快RBF网络的学习速度,比单独采用RBF 神经网络对控制器参数的调整更优,尤其是对于非 线性系统的控制,具有更明显的优势。对非线性系 统的仿真结果表明,模糊RBF网络比单独采用RBF 网络有更好的控制效果。
参考文献
[1]闯新,周露等MATLAB神经网络仿真与应用[M].北 京:科学出版社,2003.
fs(J)=IIfdi,j)(N=ⅡNi)
J;1
J-1
(4)输出层
输出层输出,4为k。,岛,幻的整定结果,由三个
节点构成,即:
盥 f4(i)=m·f3=∑∞(i,』)·fs(j)
基于神经网络的模糊PID控制器设计与实现

基于神经网络的模糊PID控制器设计与实现随着科技的不断发展,控制技术在工业自动化中的应用越来越广泛。
PID控制器因其简单易懂、易实现的特点而被广泛使用,但是传统的PID控制器在某些场合下会出现失效的情况。
为了解决这一问题,研究者们开始着手开发基于神经网络的模糊PID控制器。
本文将介绍基于神经网络的模糊PID控制器的设计与实现。
一、控制器介绍基于神经网络的模糊PID控制器是一种新型的控制器,它将模糊控制的优点与神经网络的处理能力相结合,形成了一种高效的自适应控制器。
该控制器利用神经网络的学习算法实现自适应参数的调节,将模糊控制中的模糊规则与神经网络的处理能力相结合,形成一种新的控制方法。
该控制器的核心思想是利用神经网络对系统进行建模,通过学习算法自适应地调节系统参数,从而实现对系统的控制。
其中,模糊控制器用于对输出进行模糊处理,神经网络用于对输入和输出进行处理,从而实现对系统的控制。
二、控制器设计基于神经网络的模糊PID控制器的设计需要以下几个步骤:1.系统建模系统建模是设计基于神经网络的模糊PID控制器的第一步。
系统建模的目的是构建系统的数学模型,以便于后续的设计过程。
在建模过程中,需要考虑系统的类型、运动方程、非线性因素等因素。
2.控制器设计控制器的设计是基于神经网络的模糊PID控制器设计的核心。
控制器的设计包括神经网络的结构设计、神经网络权值的选择、模糊控制的设计等。
3.参数调节参数调节是控制器设计的重要环节。
由于系统的运动方程等因素的影响,不同系统的参数可能不同。
因此,在实际应用中需要根据实际情况对控制器进行参数调节。
三、控制器实现基于神经网络的模糊PID控制器的实现需要以下步骤:1.数据采集数据采集是基于神经网络的模糊PID控制器实现的第一步。
数据采集的目的是获取系统的输入输出,以便为神经网络提供数据。
2.神经网络训练神经网络训练是实现控制器的关键步骤。
在训练过程中,通过对神经网络进行学习,让它逐渐对系统的输入输出进行建模。
基于模糊神经网络PID的复合控制策略
基于模糊神经网络PID的复合控制策略基于模糊神经网络(Fuzzy Neural Network,FNN)的复合控制策略是一种融合了模糊控制和神经网络控制技术的控制方法。
它可以通过学习样本数据和自适应调整网络参数,提高控制系统的鲁棒性和泛化能力。
下面将详细介绍基于模糊神经网络PID的复合控制策略原理和应用。
基于模糊神经网络PID的复合控制策略是由模糊控制器、神经网络控制器和PID控制器组成的。
其中,模糊控制器主要负责处理模糊化和解模糊化过程,神经网络控制器用于学习和逼近未知系统的非线性特性,PID控制器用于处理系统的稳态误差。
在复合控制策略中,首先通过模糊化将系统状态转化为模糊集合,然后使用模糊规则对输入输出进行模糊匹配。
接着,利用神经网络控制器对模糊控制器的输出进行修正和优化,使系统可以更好地适应不确定性和非线性特性。
最后,利用PID控制器对系统的稳态误差进行补偿,达到控制目标。
模糊神经网络PID的复合控制策略具有以下几个优势:首先,模糊控制器可以通过建立模糊规则库来描述模糊规律,相比传统的控制方法更加灵活和直观。
它可以处理非线性、不确定性和复杂系统,适用于各种工程控制场景。
其次,神经网络控制器可以通过学习样本数据和调整网络参数来自适应系统的非线性特性。
它可以通过反向传播算法或遗传算法等方法来优化网络结构和权值,提高系统的控制性能和鲁棒性。
最后,PID控制器作为经典的控制器,主要用于处理系统的稳态误差和快速响应。
它可以通过调整比例、积分和微分参数来实现良好的控制效果。
基于模糊神经网络PID的复合控制策略在许多领域都得到了应用。
例如,在机器人控制、电力系统和过程控制等领域,通过融合模糊控制和神经网络控制技术,可以更好地处理系统的非线性、不确定性和复杂性问题,提高系统的控制性能和鲁棒性。
此外,由于PID控制器在工业控制中应用广泛,复合控制策略可以与传统的控制方法相结合,弥补传统控制方法的不足,提高整体控制系统的性能。
无人艇运动模糊控制技术研究(可编辑)

无人艇运动模糊控制技术研究(可编辑)分类号: 密级: U D C : 编号: 工学硕士学位论文无人艇运动模糊控制技术研究硕士研究生 :董早鹏指导教师 :万磊研究员学科、专业 :船舶与海洋结构物设计制造论文主审人 :丁勇教授哈尔滨工程大学2013 年 3 月分类号: 密级: U D C : 编号: 工学硕士学位论文无人艇运动模糊控制技术研究硕士研究生 :董早鹏指导教师 :万磊研究员学位级别 :工学硕士学科、专业 :船舶与海洋结构物设计制造所在单位 :船舶工程学院论文提交日期 :2013 年 1月 18 日论文答辩日期 :2013 年 3月 15 日学位授予单位 :哈尔滨工程大学Classified Index:U.D.C:A Dissertation for the Degree of M. EngResearch on Motion Control ofUSV Based onFuzzy TechnologyCandidate: Dong ZaopengSupervisor: Researcher Wan LeiAcademic Degree Applied for: Master of EngineeringSpecialty:Design and Construction of Naval Architectureand Ocean StructureDate of Submission: Jan.18, 2013Mar.15, 2013Date of Oral Examination:University: Harbin Engineering University哈尔滨工程大学学位论文原创性声明本人郑重声明:本论文的所有工作,是在导师的指导下,由作者本人独立完成的。
有关观点、方法、数据和文献的引用已在文中指出,并与参考文献相对应。
除文中已注明引用的内容外,本论文不包含任何其他个人或集体已经公开发表的作品成果。