神经网络自适应PID控制
神经网络PID控制
NNI
十
十
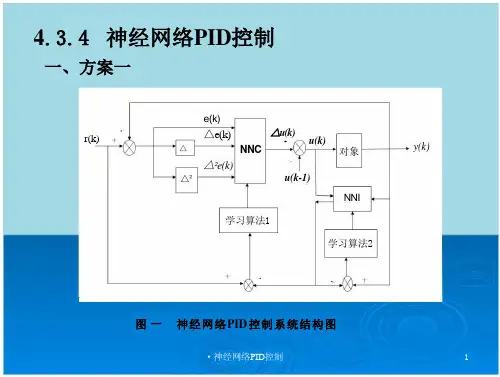
x₁(k)=e(k)x₂(k)=△e(k)=e(k)-e(k-1)x₃(k)=△²e(k)=e(k)-2e (k-1)+e(k-2)e(k)=r(k)-y(k)NNC 的输出为:△u(k)=k₁x₁(k)+k₂x₂(k)+k₃x₃(k)式中,}i=1,2,3 为权系数,△u(k) 为输入信号的加权和。由此可见,NNC 具有增量D 控制的结构
i=1,2,…,Q-1
BP网络的输入层节点的输为
网络的隐含层输入、输为
·神经网络PID控制 20
o(k)=1
(13)
(14)
式中o 为输出层权系数 阈值,
网络的输出层的输入输出为
·神经网络PID控制 21
图二 神经网络PID控制系统结构图
·神经网络PID控制 17
二、方案二
被控对象
u
个
经典PID控制算式为u(k)=u(k-1)+Kp[e(k)-e(k-1)]+K,e(k)+K,[e(k)-2e(k-1) + e(k-2)1
7.由(20)式,计算修正输出层敝系数。(k);8.由(21)式,计算修正隐含层敝系数。)(k);9.置k=k+1, 返回到“3”,直到性能指标J 满足要求。
·神经网络PID控制 26
系数a(k)是慢时变的,a(k)=1.2(1-0.8e -01k),神经网络结构为4—5—3,输入层的个神经元分别为模型翰入r(k)、 输 出(k)、误 差(k)和常量。学习速率=0.25,动量系数=0.05,加权系数初始值取随[=0.50.5]上的随机数。当输入信号为幅值是的正弦信号(t)sin(2πt)时,取采样时间为.001s,仿真结果如图所示。·神经网络PID控制 27
基于神经网络的自适应控制技术研究
基于神经网络的自适应控制技术研究神经网络作为一种模拟人脑神经元网络的计算模型,在多个领域得到了广泛的应用。
其中,自适应控制技术是神经网络研究的重要方向之一。
使用神经网络进行自适应控制,可以有效地解决各种非线性、时变和模型不确定的动态系统控制问题。
一、神经网络的基本原理神经网络模仿人类大脑组织,由若干个神经元构成。
每个神经元接受若干个输入信号,并将它们加权求和后传递到激活函数中进行处理,最终得到输出信号。
多个神经元可以组成网络,进行更加复杂的信息处理和控制。
神经网络的学习过程是通过对输入和输出数据的训练实现的。
通常采用的训练方法是反向传播算法。
该算法基于一种误差反向传播的思想,通过计算每个神经元的误差,根据误差大小对神经元的权重进行更新和调整,不断减小网络的误差,达到有效的学习效果。
二、自适应控制技术自适应控制技术是一种针对动态系统进行控制的技术。
动态系统具有非线性、时变性、模型不确定等特性,传统的线性控制方法往往难以达到理想的效果。
自适应控制技术基于神经网络模型,可以进行模型自适应、参数自适应和信号处理等多种操作,以适应各种复杂的动态系统。
常见的自适应控制方法有基于模型参考自适应控制、基于模型自适应控制、基于直接自适应控制等。
其中,基于模型参考自适应控制是一种应用广泛的方法。
该方法将实际输出与期望参考模型的输出进行比较,通过误差反馈,计算调整控制器参数的信号,最终实现对动态系统的控制。
三、神经网络自适应控制技术的研究进展神经网络自适应控制技术在航空、机械、电力、化工等行业中得到了广泛的应用。
在航空领域,神经网络自适应控制技术可以应用于飞机自动驾驶、导航、起降控制等方面。
在机械领域,神经网络自适应控制技术可以应用于机械臂、机器人控制、数控机床等领域。
在电力、化工领域,神经网络自适应控制技术可以应用于发电机组调节、化工装置控制等领域。
目前,神经网络自适应控制技术的研究主要集中在以下几个方面:1.神经网络自适应PID控制技术PID控制是一种基于比例、积分、微分三个控制器参数的控制方法。
(完整word版)基于BP神经网络的自整定PID控制仿真
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。
2.通过实验掌握神经网络自整定PID的工作原理。
3.了解神经网络的结构对控制效果的影响。
4. 掌握用Matlab实现神经网络控制系统仿真的方法。
二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中,PID控制是工业控制中最常用的方法。
这是因为PID控制器结构简单,实现简单,控制效果良好,已得到广泛应用。
但是,PID具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外界环境的变化。
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用神经网络控制的方法。
利用神经网络的自学习这一特性,并结合传统的PID控制理论,构造神经网络PID控制器,实现控制器参数的自动调整。
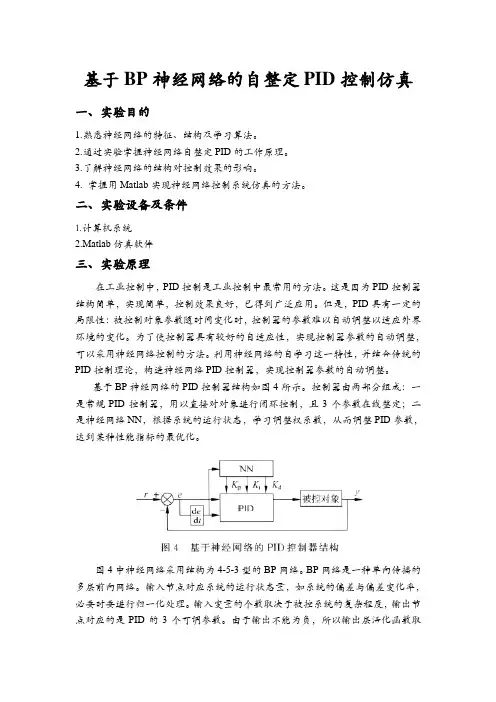
基于BP神经网络的PID控制器结构如图4所示。
控制器由两部分组成:一是常规PID控制器,用以直接对对象进行闭环控制,且3个参数在线整定;二是神经网络NN,根据系统的运行状态,学习调整权系数,从而调整PID参数,达到某种性能指标的最优化。
图4中神经网络采用结构为4-5-3型的BP网络。
BP网络是一种单向传播的多层前向网络。
输入节点对应系统的运行状态量,如系统的偏差与偏差变化率,必要时要进行归一化处理。
输入变量的个数取决于被控系统的复杂程度,输出节点对应的是PID的3个可调参数。
由于输出不能为负,所以输出层活化函数取2()(1)()(1)1(1)a k y k y k u k y k -=+-+-非负的Sigmoid 函数,隐含层取正负对称的Sigmoid 函数。
本系统选取的BP 网络结构如图5所示。
网络的学习过程由正向和反向传播两部分组成。
如果输出层不能得到期望输出,那么转入反向传播过程,通过修改各层神经元的权值,使得误差信号最小。
输出层节点分别对应3个可调参数K p 、K i 、K d 。
单神经元自适应PID
单神经元自适应PID一、单神经元神经网络与PID 结合的基础根据前面的推文“神经网络基础”中所介绍的,神经元是多输入单输出的,训练的目的确定权值,从而当给予输入时,能给出理想的输出。
对于PID 控制来讲,以增量式PID 为例,公式如下()()()[]()()()()[]212**1*-+--++--=∆k E k E k E kd k E ki k E k E kp k U输入是()k E 、()1-k E 和()2-k E ,输出是增量()k U ∆,对于PID 来讲,最重要的任务是确定系数。
两者相比较,只要将大量的()k E 、()1-k E 和()2-k E 作为输入,()k U ∆作为输出,确定权值的过程就是确定PID 系数的过程。
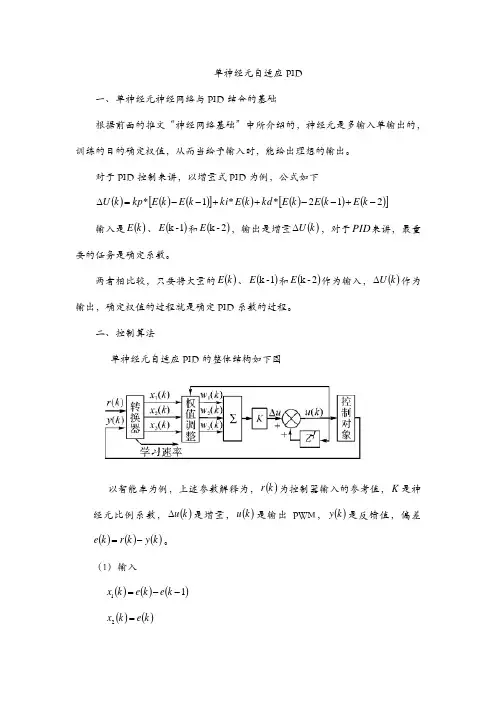
二、控制算法单神经元自适应PID 的整体结构如下图以智能车为例,上述参数解释为,()k r 为控制器输入的参考值,K 是神经元比例系数,()k u ∆是增量,()k u 是输出PWM ,()k y 是反馈值,偏差()()()k y k r k e -=。
(1)输入()()()11--=k e k e k x ()()k e k x =2()()()()2123-+--=k e k e k e k x(2)权值根据前面讲的,学习规则有两类有导师学习和无导师学习,其中无导师的Hebb 学习规则,又叫无监督Hebb 学习规则,其公式为()()()()()()k y k y k w k w k w k w i j ij ij ij ij η=∆∆+=+1η是设定的学习速率,()k y j 、()k y i 分别是k 时刻i 神经元与j 神经元的输出。
结合Delta 规则,得到有监督的Hebb 学习规则,其公式为()()()()()()()()[]k y k d k y k y k w k w k w k w j j i j ij ij ij ij -=∆∆+=+η1其中,()k d j 是期望输出,()()k y k d j j -在这里即为()()k e k x =2,。
单神经元自适应PID控制算法
单神经元自适应PID 控制算法一、单神经元PID 算法思想神经元网络是智能控制的一个重要分支,神经元网络是以大脑生理研究成果为基础,模拟大脑的某些机理与机制,由人工建立的以有向图为拓扑结构的网络,它通过对连续或断续的输入做状态响应而进行信息处理;神经元网络是本质性的并行结构,并且可以用硬件实现,它在处理对实时性要求很高的自动控制问题显示出很大的优越性;神经元网络是本质性的非线性系统,多层神经元网络具有逼近任意函数的能力,它给非线性系统的描述带来了统一的模型;神经元网络具有很强的信息综合能力,它能同时处理大量不同类型的输入信息,能很好地解决输入信息之间的冗余问题,能恰当地协调互相矛盾的输入信息,可以处理那些难以用模型或规则描述的系统信息。
神经元网络在复杂系统的控制方面具有明显的优势,神经元网络控制和辨识的研究已经成为智能控制研究的主流。
单神经元自适应PID 控制算法在总体上优于传统的PID 控制算法,它有利于控制系统控制品质的提高,受环境的影响较小,具有较强的控制鲁棒性,是一种很有发展前景的控制器。
二、单神经元自适应PID 算法模型单神经元作为构成神经网络的基本单位,具有自学习和自适应能力,且结构简单而易于计算。
传统的PID 则具有结构简单、调整方便和参数整定与工程指标联系紧密等特点。
将二者结合,可以在一定程度上解决传统PID 调节器不易在线实时整定参数,难以对一些复杂过程和参数时变、非线性、强耦合系统进行有效控制的不足。
2.1单神经元模型对人脑神经元进行抽象简化后得到一种称为McCulloch-Pitts 模型的人工神经元,如图2-1所示。
对于第i 个神经元,12N x x x 、、……、是神经元接收到的信息,12i i iN ωωω、、……、为连接强度,称之为权。
利用某种运算把输入信号的作用结合起来,给它们的总效果,称之为“净输入”,用i net 来表示。
根据不同的运算方式,净输入的表达方式有多种类型,其中最简单的一种是线性加权求和,即式 (2-1)。
神经PID控制
u 3 ( k ) = k d [e ( k ) e ( k 1)] = k d e ( k ) u 3 (k ) (k
与误差 e(k)的微分成比例,因,采样控制,
与误差的一阶差分成比例:
e(k ) = e(k ) e(k 1)
在 e(k ) ≠ 0 时起作用,可提高系统的稳定性,只有比例加微分一起控制才能奏效, 增加控制系统的阻尼比,在保证系统有一定的相对稳定性的情况下,容许采用较大的增 益,减小稳态误差. 微分作用不足之处是放大了噪声信号. 当对象与扰动是确定性时,有多种设计 PID 控制器的方法,得到的三个系数是常数.
1
神经PID控制 控制结构见下图,有两个神经网络: 神经 控制 NNI——系统在线辨识器;NNC——自适应PID控制器. 工作原理是 由NNI对被控对象在线辨识的基础上,通过对NNC的权系进行实时 调整,使系统具有自适应性,达到有效控制.
PID 控制器
r e
u
NNC
对象
y
学习算法
NNI
y
学习算法 -
r e
u
NNC
对象
y
学习算法
NNI
y
学习算法 -
e2
-
e1
图 4-4-1 神经 PID 控制框图
3
隐层第 i 节点的输出:
o i ( k ) = f [ x i ( k )]
xi (k ) =
∑
j=0
N
1
w ij I j ( k ), j = 1, 2 , , N ,
I 0 (k ) = 1
1 ex f ( x) = 1 + ex
u ( k ) = ci ( k ) ,代入上式,有 v i ( k )
基于神经网络的PID控制算法研究
基于神经网络的PID控制算法研究近年来,随着机器学习和人工智能技术的不断发展,神经网络在控制领域的应用也逐渐得到了广泛关注。
其中,基于神经网络的PID控制算法作为一种新型的控制方法,已经被证明具有极高的控制精度和适应性。
由于传统的PID控制算法存在着超调、稳态误差等问题,因此在实际工程中往往需要进行各种手动调参。
而基于神经网络的PID控制算法则可以通过学习数据来自适应地优化控制参数,从而在不同工况下都能够实现优秀的控制效果。
同时,神经网络还可以实现非线性控制和逆模型控制等高级控制策略,更加符合实际应用的需求。
基于神经网络的PID控制算法的基本思路是,将神经网络与PID控制器结合起来,构建一个新的混合型学习控制器。
具体而言,首先需要建立一个基于神经网络的模型来描述被控对象的动态特性,然后利用该模型对PID控制器进行参数的自适应优化,最终实现目标系统的控制。
一般来讲,神经网络PID控制算法的实现过程包括以下几个步骤:首先,需要选择合适的神经网络模型和控制器结构。
然后,利用样本数据对神经网络进行训练,得到一个有效的模型。
接着,将训练好的神经网络模型与PID控制器进行耦合,形成一个混合型控制器。
最后,通过仿真或者实际测试来验证控制器的性能。
在具体实现神经网络PID控制算法时,需要注意以下几个关键问题:一是神经网络的选择和搭建,不同的应用需要选择不同的网络结构和训练算法;二是神经网络模型的准确性,神经网络需要能够准确地描述被控对象的动态特性;三是控制器的参数优化,需要避免过度学习和过拟合等问题。
目前,神经网络PID控制算法已经成功应用于许多领域,例如机械控制、电力系统控制、化工过程控制等。
实际应用结果显示,基于神经网络的PID控制算法相比传统PID控制算法,在控制精度、抗干扰能力、稳定性等方面都具有显著的优势,是一种极具应用前景的控制策略。
总的来说,基于神经网络的PID控制算法是一种结合了神经网络与PID控制器的混合型学习控制策略,具有优秀的控制精度和适应性。
神经网络自适应PID控制
0 < η (k ) ≤ −2
∑∑ w
j =1i =1
s
3
e j (k )
ij ( k )
2 s 3 1 ∑ ∑ w (k ) q ( k ) j =1 i =1 ij
1 PIDNNC的设计及实现
s 3 e j (k ) q (k ) ≥ 0 ,则 2)如果 ∑∑ j =1i =1 wij ( k ) s 3
s
(
)
(
)
1 PIDNNC的设计及实现
关键步骤2: 关键步骤 :
∂e j (k )
3 ∂e j (k ) ∆e j ( k ) = ∑ ∑ ∆wil (k ) ∂wil (k ) l =1 i =1
s
∂u (k ) ∂e j (k )
基于神经网络的自适应PID控制
1 PIDNNC的设计及实现 2 PIDNNC的初始权值的选取 3 PIDNNC在倒立摆镇定控制中的应用
基于BP神经网络的PID控制器的设计
基于BP神经网络的PID控制器的设计简介:PID控制器是一种常用的控制方法,可以使控制系统快速、稳定地对目标进行调节。
然而,传统的PID控制器需要依赖经验的设置参数,很难适用于非线性复杂的系统。
为了改善这一问题,本文提出了一种基于BP神经网络的PID控制器的设计方法。
一、神经网络介绍BP神经网络是一种常用的人工神经网络,通过反向传播算法进行学习和适应。
它可以用来建模非线性关系、解决分类和回归问题等。
BP神经网络由输入层、隐藏层和输出层构成,通过调整权重和偏置项,使得网络的输出接近于期望输出。
二、PID控制器的基本原理PID控制器是由比例(P)、积分(I)和微分(D)三个部分组成的,它们分别对应了系统的比例性能、整定性能和微分性能。
PID控制器的输出是由目标值与实际值之间的误差来决定的。
比例作用是根据误差的大小进行调节,积分作用是根据误差的积分值进行调节,微分作用是根据误差的变化率进行调节。
三、BP神经网络的PID控制器设计1.建立神经网络模型:确定输入层节点数、隐藏层节点数和输出层节点数。
2.确定权重和偏置项的初始值:可以使用随机数进行初始化。
3.设置训练样本集:训练样本集包括输入和输出的数据,可以根据实际情况进行设置。
4.确定学习率和训练次数:学习率决定了网络的更新速度,训练次数决定了网络的学习程度。
5.神经网络训练:使用BP算法对神经网络进行训练,通过反向传播算法调整权重和偏置项。
6.测试神经网络性能:使用测试数据对神经网络进行测试,评估其性能是否满足要求。
7.参数调整:根据测试结果对PID控制器的参数进行调整,使得神经网络对系统的控制更加精确。
四、实验结果分析通过对比传统的PID控制器和基于BP神经网络的PID控制器,可以发现基于BP神经网络的PID控制器具有更好的系统控制性能。
因为BP神经网络能够自适应地调整参数,适应非线性复杂系统的控制要求。
总结:基于BP神经网络的PID控制器是一种有效的控制方法,可以提高系统控制的精度和稳定性。
基于神经网络的自适应PID控制策略研究
基于神经网络的自适应PID控制策略研究近年来,神经网络技术逐渐成为控制领域中的热点研究方向之一。
在控制领域中,PID控制器是最常用的一种控制器,但是,在复杂的非线性系统中,PID控制器可能会失效,因此需要一种更为智能化的自适应控制策略。
本文将着重研究基于神经网络的自适应PID控制策略的原理和应用。
一、神经网络控制简介神经网络控制是一种使用神经网络技术实现控制的控制方法。
神经网络具有自学习和自适应能力,能够适应未知的非线性因素,因此能够有效地提高控制精度。
在神经网络控制中,通常使用BP神经网络进行训练,将网络的输入与输出之间的关系建模,进而得到控制器。
二、PID控制器PID控制器是最常用的一种控制器,它由比例项、积分项和微分项组成。
其中,比例项控制系统的静态误差,积分项控制系统的稳态误差,微分项控制系统的动态响应。
经过调整PID参数,可以实现对系统的稳态和动态性能的优化。
三、传统PID控制器的缺点通过传统PID控制器的参数调整,可以得到较好的控制效果。
但是,在非线性系统控制中,PID控制器的参数调整会变得更加困难,可能会导致系统不稳定或控制精度不高。
这是因为传统PID控制器中的参数是固定的,无法根据系统的变化进行自适应调整。
因此,需要一种更为灵活、智能的自适应控制方式。
四、基于神经网络的自适应PID控制策略与传统PID控制器不同,基于神经网络的自适应PID控制器能够在实时控制过程中不断调整控制器参数,以应对不同的情况。
它能够根据系统的输入和输出实时调整控制器的权值,从而实现对非线性系统的自适应控制。
基于神经网络的自适应PID控制策略的实现方法,一般是将系统的输入和输出作为训练数据,通过训练得到神经网络的权值。
在控制器实时控制过程中,根据系统输出实时调整神经网络的权值,从而实现自适应控制。
五、应用实例基于神经网络的自适应PID控制策略在实际应用中,可以针对不同的场景进行多样化应用。
下面以一个灯光控制系统为例来进行说明。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 s 3 e j (k ) 1 s 3 1 2 q (k )η 2 (k ) q(k )η (k ) + ∑ ∑ ∆V (k ) = ∑ ∑ wij (k ) 2 j =1 i =1 wij (k ) j =1 i =1
s
∂y j ( k ) ∂u ( k )
取符号函数(+1, -1)
输出层
wi = 1 (i = 1,2,3)
1 PIDNNC的设计及实现
定理2.1 定理2.1 闭环系统稳定的充分条件是,在采样周期k时隐 含层的所有学习速率都应取相同的值 η (k ),且满足下式:
s 3 e j (k ) q ( k ) < 0 ,则 1)如果 ∑∑ w (k ) j =1i =1 ij
j =1
s
s
隐 含 层
a 2 (k ) =
∑ w2 j (k )e j (k )
j =1
s s j =1 j =1
a3 (k ) = ∑ w3 j (k )e j (k ) − ∑ w3 j (k − 1)e j (k − 1)
输出层节点
u (k ) = ∑ wi (k )ai (k )
i =1
3
1 PIDNNC的设计及实现
K* feedbak plus
Demu
lqr_Scope_theta2
lqr_Scope_x_dot
lqr_Scope_theta1_dot
lqy_Scope_u
lqr_Scope_theta2_dot
2 PIDNNC的初始权值的选取
Q = 90 * diag (80,0.4,10,2.8,0.2,0.4)
1 PIDNNC的设计及实现
证明方法: 证明方法: 直接Lyapunov方法
1 s 2 V (k ) = ∑ e j (k ) 2 j =1
∆V (k ) ≤ 0
关键步骤1: 关键步骤 :
∆V (k ) = V (k + 1) − V (k )
1 2 = ∑ ∆e j (k ) e j (k ) + ∆e j (k ) 2 j =1
∂u (k ) = ∂W (k ) ∂Wil (k ) il
3 p ( k )e 2 ( k ) l ∆e j ( k ) = ∑ ∑ η il (k ) l =1 i =1 wij ( k )
s
3 ∑ 1 q ( k )η ( k ) ∆e j ( k ) = wij ( k ) i =1
K = [32.1522 129.3426 − 234.6127 28.1289 1.9087 − 33.4221]
R = 5.5
2 PIDNNC的初始权值的选取
e1 e2 e3 a1 w21 w22 w31 w32 w
23
w33
a 2 w2 w3 a3
u
PD
w31 (0) = k x T = 5625 .78 ɺ
s
(
)
(
)
1 PIDNNC的设计及实现
关键步骤2: 关键步骤 :
∂e j (k )
3 ∂e j (k ) ∆e j ( k ) = ∑ ∑ ∆wil (k ) ∂wil (k ) l =1 i =1
s
∂u (k ) ∂e j (k )
w32 (0) = kθɺ T = 381.74
1
w21 (0) = k x = 32 .1522
w 22 ( 0 ) = kθ1 = 129 .3426
w23 (0) = kθ 2 = −234.6127
w33 (0) = kθɺ T = −6684.42
2
3 PIDNNC在倒立摆镇定控制中 的应用
0 < η (k ) ≤ −2
∑∑ w
j =1i =1
s
3
e j (k )
ij ( k )
2 s 3 1 ∑ ∑ w (k ) q ( k ) j =1 i =1 ij
1 PIDNNC的设计及实现
s 3 e j (k ) q (k ) ≥ 0 ,则 2)如果 ∑∑ j =1i =1 wij ( k ) s 3
1 PIDNNC的设计及实现
→确定网络输入层节点的数目
→确定隐含层节点 →网络隐含层权值的初始值 →运行系统,在每个k采样周期内
——读取系统输出变量,并计算所有变量的误差值 ——计算网络隐含层输出 ——计算控制量 ——根据定理2.1确定学习速率,并根据权值调整律更新权值 ——输出控制量
2 PIDNNC的初始权值的选取
1. 获取模型(倒立摆)方程 2. 选择不同的Q、r值,使用LQR算法获得反馈矩阵K 3. 在simulink环境中运行闭环控制系统,察看控制性能 4. 选择最优的K,并赋值网络隐含层权值
y(n)=Cx(n)+Du(n) x(n+1)=Ax(n)+Bu(n) Discrete State-Space lqr_Scope_theta1 lqr_Scope_x
−2
∑∑ w
j =1i =1
e j (k )
ij ( k ) 2
s 3 1 ∑ ∑ w (k ) j =1 i =1 ij
≤ η (k ) ≤ 0
q ( k )
其中,
s s e (k ) sgn ∆y j (k ) e 2 (k ) ∑ j q(k ) = ∑ j ∆u (k ) j =1 j =1
PIDNNC R(k) E(k) e1 e2 es u(k) 被控对象 Y(k)
闭环系统结构
总误差函数
J j (k ) =
1 1 e j (k ) 2 = r j (k ) − y j (k ) 2 2 2
(
)
(
)
梯度下降法 调整原则 弹性原理
1 PIDNNC的设计及实现
隐含层
∆y j ( k ) wij (k + 1) = wij (k ) + η ij (k )e j (k ) ∑ e j (k ) sgn ∆u ( k ) j =1
3 PIDNNC在倒立摆镇定控制中 的应用
LQR控制器 0.1 位移(米 米)
0
神经网络控制器
0
10
20 时间(秒)
30
40
3 PIDNNC在倒立摆镇定控制中 的应用
0.2 LQR控制器
位移(米 米)
0 神经网络控制器
-0.2
0
10
时间(秒)
20
30
智能控制期末考核作业
《智能控制技术的现状及发展趋势》 要求调研10-20篇参考文献(其中英文3~5篇),通 过分析和整理文献内容,以小论文的形式提交调研报告; 主要从文献调研情况(20%)、论文内容(50%)、论文的 结构(15%),文字表达(15%)方面进行评分。 模板请见“智能控制技术的现状及发展趋势 .doc” 4~8页 16周周三第四讲交,东1210
∑ w1 j (k )e j (k )
j =1
s
1 − z −1
u
es
ws3
s w (k )e (k ) (1 − z −1 ) a3 ( k ) = ∑ 3 j j j =1
激活函数:f = 1
多变量PID
1 PIDNNC的设计及实现
a1 (k ) = ∑ w1 j (k )e j (k ) + a1 (k − 1)
基于神经网络的自适应PID控制
1 PIDNNC的设计及实现 2 PIDNNC的初始权值的选取 3 PIDNNC在倒立摆镇定控制中的应用
1 PIDNNC的设计及实现
z-1 e1 e2 w11 w21 n1 ws1 n2 n3 f -z-1 输入层 隐含层 输出层 a1 f a2 f a3 f
a1 ( k ) =