基于S函数的RBF神经网络PID控制器
基于RBF神经网络的PID控制在变风量空调系统中的应用

基于RBF神经网络的PID控制在变风量空调系统中的应用瞿睿;李界家【摘要】The RBF neural network in PID control was introduced,a three-layer neural network model was established,the online identification of RBF neural network to online adjust three parameters of PID control was used to improve the control effect of this system.The simulation results showed that compared PID control based on RBF neural network with traditional PID control,the former has stronger robustness and adaptive ability,high control precision,better and reliable control effect and other advantages.%将RBF神经网络引入PID控制中,建立了一个三层神经网络模型。
通过RBF神经网络的在线辨识对PID控制的三个参数进行在线调整,从而改善系统的控制效果。
仿真结果表明:基于RBF神经网络的PID控制与传统PID控制相比,具有较强的鲁棒性和自适应能力,控制精度高,效果好,安全可靠。
【期刊名称】《现代建筑电气》【年(卷),期】2012(000)002【总页数】4页(P10-13)【关键词】变风量空调系统;RBF神经网络;PID控制【作者】瞿睿;李界家【作者单位】沈阳建筑大学信息与控制工程学院,辽宁沈阳110168;沈阳建筑大学信息与控制工程学院,辽宁沈阳110168【正文语种】中文【中图分类】TU8550 引言变风量空调(Variable Air Volume,VAV)系统是一种节能效果显著的全空气系统。
基于S函数的RBF神经网络PID控制器

基于径向基函数的神经网络的PID控制器摘要RBF神经网络在分类问题中得到了广泛的应用,尤其是模式识别的问题。
许多模式识别实验证明,RBF具有更有效的非线性逼近能力,并且RBF神经网络的学习速度较其他网络快。
本文在具有复杂控制规律的S函数构造方法的基础上,给出了基于MATLAB语言的RBF神经网络PID控制器,及该模型的一非线性对象的仿真结果。
关键词:S函数;RBF神经网络PID控制器;Simulink仿真模型径向基函数(RBF-Radial Basis Function)神经网络是由J.Moody和C.Darken 在20世纪80年代末提出的一种神经网络,它具有单隐层的三层前馈网络。
由于它模拟了人脑中局部调整、相互覆盖接受域(或称野-Receptive Field)的神经网络结构,因此,RBF神经网络是一种局部逼近网络,已证明它能以任意精度逼近任意连续函数。
1.S函数的编写方法S函数是Simulink中的高级功能模块,Simulink是运行在MATLAB环境下用于建模、仿真和分析动态系统的软件包。
只要所研究的系统模型能够由MATLAB语言加以描述,就可构造出相应的S函数,从而借助Simulink中的S 函数功能模块实现MATLAB与Simulink之间的沟通与联系,这样处理可以充分发挥MATLAB编程灵活与Simulink简单直观的各自优势。
当系统采用较复杂的控制规律时,Simulink中没有现成功能模块可用,通常都要采用MATLAB编程语言,编写大量复杂而繁琐的源程序代码进行仿真,一是编程复杂、工作量较大,二来也很不直观。
如果能利用Simulink提供的S函数来实现这种控制规律,就可以避免原来直接采取编程的方法,不需要编写大量复杂而繁琐的源程序,编程快速、简捷,调试方便,则所要完成的系统仿真工作量会大大减少。
RBF神经网络PID控制器的核心部分的S函数为:function [sys,x0,str,ts]=nnrbf_pid(t,x,u,flag,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0) switch flag,case 0, [sys,x0,str,ts] = mdlInitializeSizes(T,nn);case 2, sys = mdlUpdates(u);case 3, sys = mdlOutputs(t,x,u,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0);case {1, 4, 9}, sys = [];otherwise, error(['Unhandled flag = ',num2str(flag)]);endfunction [sys,x0,str,ts] = mdlInitializeSizes(T,nn)sizes = simsizes;sizes.NumContStates = 0; sizes.NumDiscStates = 3;sizes.NumOutputs = 4+5*nn; sizes.NumInputs = 9+15*nn;sizes.DirFeedthrough = 1; sizes.NumSampleTimes = 1;sys=simsizes(sizes); x0=zeros(3,1); str=[]; ts=[T 0];function sys = mdlUpdates(u)sys=[u(1)-u(2); u(1); u(1)+u(3)-2*u(2)];function sys = mdlOutputs(t,x,u,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0)ci_3=reshape(u(7: 6+3*nn),3,nn); ci_2=reshape(u(7+5*nn: 6+8*nn),3,nn);ci_1=reshape(u(7+10*nn: 6+13*nn),3,nn);bi_3=u(7+3*nn: 6+4*nn); bi_2=u(7+8*nn: 6+9*nn);bi_1=u(7+13*nn: 6+14*nn); w_3= u(7+4*nn: 6+5*nn);w_2= u(7+9*nn: 6+10*nn); w_1= u(7+14*nn: 6+15*nn); xx=u([6;4;5]);if t==0ci_1=w0(1)*ones(3,nn); bi_1=w0(2)*ones(nn,1);w_1=w0(3)*ones(nn,1); K_pid0=K_pid;else, K_pid0=u(end-2:end); endfor j=1: nn % Gaussian basis hh(j,1)=exp(-norm(xx-ci_1(:,j))^2/(2*bi_1(j)*bi_1(j)));enddym=u(4)-w_1'*h; w=w_1+xite*dym*h+alfa*(w_1-w_2)+beta0*(w_2-w_3); for j=1:nnd_bi(j,1)=xite*dym*w_1(j)*h(j)*(bi_1(j)^(-3))*norm(xx-ci_1(:,j))^2;d_ci(:,j)=xite*dym*w_1(j)*h(j)*(xx-ci_1(:,j))*(bi_1(j)^(-2));endbi=bi_1+d_bi+alfa*(bi_1-bi_2)+beta0*(bi_2-bi_3);ci=ci_1+d_ci+alfa*(ci_1-ci_2)+beta0*(ci_2-ci_3);dJac=sum(w.*h.*(-xx(1)+ci(1,:)')./bi.^2); % JacobianKK=K_pid0+u(1)*dJac*eta_pid.*x; sys=[u(6)+KK'*x; KK; ci(:); bi(:); w(:)];该控制器中的外部参数均在封装后的控制器参数对话框中给出。
基于S函数的RBF神经网络PID控制器Simulink仿真
基于S函数的RBF神经网络PID控制器Simulink仿真李绍铭;赵伟
【期刊名称】《安徽冶金科技职业学院学报》
【年(卷),期】2008(018)001
【摘要】以 RBF 神经网络 PID 控制器的Simulink仿真为例,介绍了复杂控制规律的S函数构造方法.给出了基于 NATLAB语言的 RBF 神经网络PID控制器的S函数仿真模型,及该模型在一非线性对象的仿真结果.从而避免了复杂系统仿真时采用编程方法编写大量复杂而烦琐的源程序,使缩程快速、简捷,调试方便.使系统仿真工作量会大大减少.采用S函数可以充分发挥Simulink的优势,扩充 Simulink 的仿真功能,不但仿真模型简单,而且大大降低了编程的难度,特别适合于复杂控制系统的仿真.
【总页数】3页(P19-21)
【作者】李绍铭;赵伟
【作者单位】安徽工业大学电气信息学院,安徽马鞍山,243002;安徽工业大学电气信息学院,安徽马鞍山,243002
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于S函数实现的参数自整定模糊PID控制器 [J], 鲁改凤;卢东伟;孟波;王佳;鞠阳
2.基于S函数在自抗扰控制器Simulink仿真中的应用 [J], 马永光;冉宁;赵朋
3.基于S函数的神经元PID控制器 SIMULINK仿真模型 [J], 林瑞全;邱公伟
4.基于S函数的BP神经网络PID控制器及Simulink仿真 [J], 杨艺;虎恩典
5.基于S函数的BP神经网络PID控制器Simulink仿真 [J], 李绍铭; 赵伟
因版权原因,仅展示原文概要,查看原文内容请购买。
神经网络控制(RBF)

神经网络控制(RBF)神经网络控制(RBF)是一种基于径向基函数(RBF)的神经网络,用于控制系统,其主要功能是通过对输入信号进行处理来实现对系统输出的控制。
通过神经网络控制,控制器可以学习系统的动态行为和非线性模型,从而使得控制器能够自适应地进行调整和优化,实现对系统的精确控制。
RBF 网络通常由三层组成:输入层、隐藏层和输出层。
输入层接受系统的输入信号,并将其传递到隐藏层,隐藏层对输入数据进行处理并输出中间层的值,其中每个中间层神经元都使用一个基函数来转换输入数据。
最后,输出层根据隐藏层输出以及学习过程中的权重调整,计算并输出最终的控制信号。
RBF 网络的核心是数据集,该数据集由训练数据和测试数据组成。
在训练过程中,通过输入训练数据来调整网络参数和权重。
训练过程分为两个阶段,第一阶段是特征选择,该阶段通过数据挖掘技术来确定最优的基函数数量和位置,并为每个基函数分配一个合适的权重。
第二阶段是更新参数,该阶段通过反向传播算法来更新网络参数和权重,以优化网络的性能和控制精度。
RBF 网络控制的优点在于其对非线性控制问题具有优秀的适应性和泛化性能。
另外,RBF 网络还具有强大的学习和自适应调整能力,能够学习并预测系统的动态行为,同时还可以自动调整参数以提高控制性能。
此外,RBF 网络控制器的结构简单、易于实现,并且具有快速的响应速度,可以满足实时控制应用的要求。
然而,RBF 网络控制也存在一些局限性。
首先,RBF 网络需要大量的训练数据来确定最佳的基函数数量和位置。
此外,由于网络参数和权重的计算量较大,实时性较低,可能存在延迟等问题。
同时,选择合适的基函数以及与其相应的权重也是一项挑战,这需要在控制问题中进行深入的技术和经验探索。
总体而言,RBF 网络控制是一种非常有效的控制方法,可以在广泛的控制问题中使用。
其结构简单,性能稳定,具有很强的适应性和泛化性能,可以实现实时控制,为复杂工业控制问题的解决提供了一个重要的解决方案。
基于RBF神经网络与Smith预估补偿的智能PID控制
基于RBF神经网络与Smith预估补偿的智能PID控制王菲菲;陈玮【期刊名称】《计算机工程与应用》【年(卷),期】2012(048)016【摘要】Aiming at the phenomena of big time delay are normally exist in industry control, this paper proposes an intelligent RBF-Smith-PID control based on RBF neural network algorithm and Smith predictive compensation algorithm and traditional PID controller. This method uses the ability of online-study, a self-turning control strategy of RBF neural network, and better control of Smith predictive compensation to deal with the big time delay, overcome the limitation of traditional PID control effectively, improve the system's robustness and self-adaptability, get satisfactory control to deal with the big time delay system.%针对工业控制中普遍存在的大滞后现象,提出了一种将RBF神经网络算法和Smith预估补偿算法与传统的PID控制器相结合的智能RBF-Smith-PID控制策略.该方法利用RBF神经网络的在线学习、控制参数自整定能力,和Smith预估补偿对纯滞后系统的良好控制,有效地克服了常规PID控制的缺陷,提高了系统的鲁棒性和自适应性,对纯滞后系统起到了良好的控制.【总页数】4页(P233-236)【作者】王菲菲;陈玮【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TP13【相关文献】1.基于Smith预估补偿与RBF神经网络的PID控制在工业平缝机脚踏板调速模块中的应用 [J], 何臻祥;肖忠2.基于Smith预估补偿与RBF神经网络的改进PID控制 [J], 王宝忠;宋冬锋;刘卫法3.基于Smith预估补偿的RBF神经网络的锅炉燃烧系统解耦控制 [J], 高锦;李勇;周燕弟;章家岩4.基于两级Smith预估补偿的加热炉温度串级控制 [J], 李康康5.一种基于模糊RBF神经网络的Smith预估器 [J], 沈洁;刘贺平;许鸣珠因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊-RBF神经网络优化的PID控制
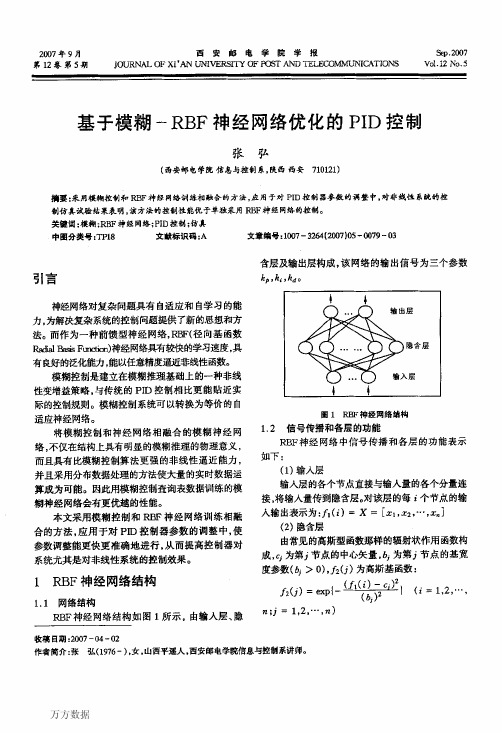
假设一个非线性被控对象的数学模型为:
y㈤=业错专邕笋业
(1)采用RBF神经网络优化参数的PIT)控制仿 真
单独采用RBF神经网络优化的PID控制,仿真 的阶跃响应曲线如图3中点划线所示。
(2)采用模糊RBF神经网络优化的PID控制的 仿真
网络的结构取2—5—5—3的形式,输入信号为 指令信号和对象的实际输出,针对每个输入取5个 模糊集进行模糊化,即n=2,N=5,网络学习参数 取≈=0.2,a=0.02。网络的初始权值及隶属函数 参数初值通过实验得到。仿真结果如图3中实线所 示:
网络权值的学习算法如下:
她(女)=口·(删£(^)一一”(女))·逊aAu·砑a,Su·瓦af4
=々‘(删(^)一砌(^))‘挚(J),3(j)
万方数据
墨!塑
塾兰!叁主壅麴二曼塑塑丝旦整垡些堕塑望苎墅
:!!:
圈2模糊RBF神经网络结构
式中,m,为网络输出节点与上一层各节点的连接 权,J=1,2,…N,口为学习速率。如果考虑动量因 子,输出层的权值为:
用模糊控制查询表数据训练的模糊RBF神经 网络能加快RBF网络的学习速度,比单独采用RBF 神经网络对控制器参数的调整更优,尤其是对于非 线性系统的控制,具有更明显的优势。对非线性系 统的仿真结果表明,模糊RBF网络比单独采用RBF 网络有更好的控制效果。
参考文献
[1]闯新,周露等MATLAB神经网络仿真与应用[M].北 京:科学出版社,2003.
fs(J)=IIfdi,j)(N=ⅡNi)
J;1
J-1
(4)输出层
输出层输出,4为k。,岛,幻的整定结果,由三个
节点构成,即:
盥 f4(i)=m·f3=∑∞(i,』)·fs(j)
基于RBF神经网络PID参数的自调节及仿真
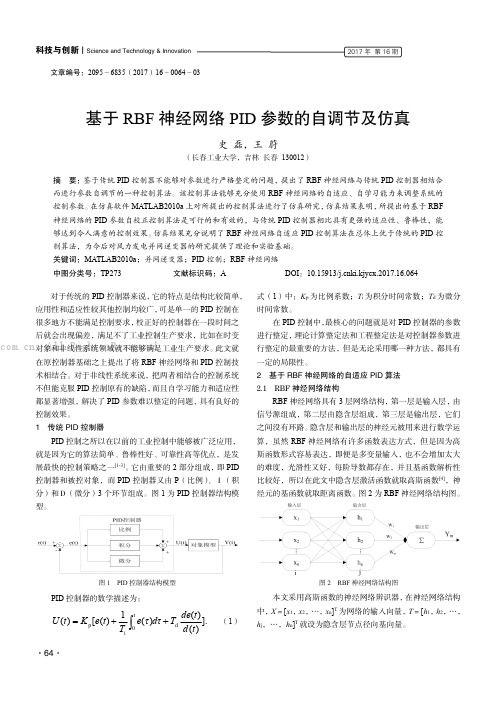
科技与创新┃Science and Technology &Innovation·64·2017年第16期文章编号:2095-6835(2017)16-0064-03基于RBF 神经网络PID 参数的自调节及仿真史磊,王蔚(长春工业大学,吉林长春130012)摘要:鉴于传统PID 控制器不能够对参数进行严格整定的问题,提出了RBF 神经网络与传统PID 控制器相结合而进行参数自调节的一种控制算法。
该控制算法能够充分使用RBF 神经网络的自适应、自学习能力来调整系统的控制参数。
在仿真软件MATLAB2010a 上对所提出的控制算法进行了仿真研究,仿真结果表明,所提出的基于RBF 神经网络的PID 参数自校正控制算法是可行的和有效的,与传统PID 控制器相比具有更强的适应性、鲁棒性,能够达到令人满意的控制效果。
仿真结果充分说明了RBF 神经网络自适应PID 控制算法在总体上优于传统的PID 控制算法,为今后对风力发电并网逆变器的研究提供了理论和实验基础。
关键词:MATLAB2010a ;并网逆变器;PID 控制;RBF 神经网络中图分类号:TP273文献标识码:ADOI :10.15913/ki.kjycx.2017.16.064对于传统的PID 控制器来说,它的特点是结构比较简单,应用性和适应性较其他控制均较广,可是单一的PID 控制在很多地方不能满足控制要求,校正好的控制器在一段时间之后就会出现偏差,满足不了工业控制生产要求,比如在时变对象和非线性系统领域就不能够满足工业生产要求。
此文就在原控制器基础之上提出了将RBF 神经网络和PID 控制技术相结合。
对于非线性系统来说,把两者相结合的控制系统不但能克服PID 控制原有的缺陷,而且自学习能力和适应性都显著增强,解决了PID 参数难以整定的问题,具有良好的控制效果。
1传统PID 控制器PID 控制之所以在以前的工业控制中能够被广泛应用,就是因为它的算法简单、鲁棒性好、可靠性高等优点,是发展最快的控制策略之一[1-3]。
基于RBF神经网络整定的Smith-PID控制及其应用

∆ki
= −η ∂E ∂ki
= −η ∂E ∂y
∂y ∂u
∂u ∂ki
=
ηe2
(k)
∂y ∂u
xc(2)
∆k d
= −η ∂E ∂k d
= −η ∂E ∂y ∂u ∂y ∂u ∂kd
=
ηe 2
(k)
∂y ∂u
xc(3)
式中, ∂y 为被控对象的 Jacobian 信息,可通过神经网络的辨识而得。 ∂u
LIU Yong, ZHAO Zi-xian (College of Sciences and Technology, Inner Mongolia University Hohhot 010021, Inner Mongolia. ) Abstract: Aiming at the big delayed time, big burthen fluctuating and mutable characteristic of the controlled object, combining Smith compensated theory with self-adaptive tuning method of PID parameter, the RBF neural network tuning Smith-PID controlling policy is presented,that is in the Smith estimator control, makes use of RBF NN self-learning tuning the PID parameter on line, achieving optimal non-linear fabrication and overcoming the defect of conventional Smith-PID controller. The results of simulation and actual application indicate the algorithm has a strong robustness and better controlling character. Keywords: RBF NN; Smith-PID; two-volumes water tank liquid 1 引言 在工业过程(如热工、化工)控制中,由于物料或能量的传输延迟,许多被控对象具有 纯滞后性质,针对大时滞时变对象的控制,把Smith预估补偿控制原理和PID调节控制方法结 合起来,提出了基于RBF网络整定Smith-PID控制算法,即在Smith补偿控制系统中,运用RBF 神经网络在线自学习整定PID参数,使既相互配合又相互制约的比例、积分和微分控制作用, 实现最佳的非线性组合,以期适应对象特性的变化。文献[1]提出了基于BP算法整定的基于 Smith-PID控制算法,但是BP网络用于函数逼近时,权值的调节采用的是负梯度下降法,这 种调节权值的方法有它的局限性,即存在着收敛速度慢和易陷入局部极小值。而径向基函数 网络无论在逼近能力、分类能力和学习速度等方面均优于BP网络[2],因此本文采用RBF网络。 2 施密斯(Smith)预估控制原理[3] 施密斯预估控制原理是:与 D(s)并接一补偿环节,用来补偿被控制对象中的纯滞后部
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于径向基函数的神经网络的PID控制器
摘要
RBF神经网络在分类问题中得到了广泛的应用,尤其是模式识别的问题。
许多模式识别实验证明,RBF具有更有效的非线性逼近能力,并且RBF神经网络的学习速度较其他网络快。
本文在具有复杂控制规律的S函数构造方法的基础上,给出了基于MATLAB语言的RBF神经网络PID控制器,及该模型的一非线性对象的仿真结果。
关键词:S函数;RBF神经网络PID控制器;Simulink仿真模型径向基函数(RBF-Radial Basis Function)神经网络是由J.Moody和C.Darken 在20世纪80年代末提出的一种神经网络,它具有单隐层的三层前馈网络。
由于它模拟了人脑中局部调整、相互覆盖接受域(或称野-Receptive Field)的神经网络结构,因此,RBF神经网络是一种局部逼近网络,已证明它能以任意精度逼近任意连续函数。
1.S函数的编写方法
S函数是Simulink中的高级功能模块,Simulink是运行在MATLAB环境下用于建模、仿真和分析动态系统的软件包。
只要所研究的系统模型能够由MATLAB语言加以描述,就可构造出相应的S函数,从而借助Simulink中的S 函数功能模块实现MATLAB与Simulink之间的沟通与联系,这样处理可以充分发挥MATLAB编程灵活与Simulink简单直观的各自优势。
当系统采用较复杂的控制规律时,Simulink中没有现成功能模块可用,通常都要采用MATLAB编程语言,编写大量复杂而繁琐的源程序代码进行仿真,一是编程复杂、工作量较大,二来也很不直观。
如果能利用Simulink提供的S函数来实现这种控制规律,就可以避免原来直接采取编程的方法,不需要编写大量复杂而繁琐的源程序,编程快速、简捷,调试方便,则所要完成的系统仿真工作量会大大减少。
RBF神经网络PID控制器的核心部分的S函数为:
function [sys,x0,str,ts]=nnrbf_pid(t,x,u,flag,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0) switch flag,
case 0, [sys,x0,str,ts] = mdlInitializeSizes(T,nn);
case 2, sys = mdlUpdates(u);
case 3, sys = mdlOutputs(t,x,u,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0);
case {1, 4, 9}, sys = [];
otherwise, error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts] = mdlInitializeSizes(T,nn)
sizes = simsizes;
sizes.NumContStates = 0; sizes.NumDiscStates = 3;
sizes.NumOutputs = 4+5*nn; sizes.NumInputs = 9+15*nn;
sizes.DirFeedthrough = 1; sizes.NumSampleTimes = 1;
sys=simsizes(sizes); x0=zeros(3,1); str=[]; ts=[T 0];
function sys = mdlUpdates(u)
sys=[u(1)-u(2); u(1); u(1)+u(3)-2*u(2)];
function sys = mdlOutputs(t,x,u,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0)
ci_3=reshape(u(7: 6+3*nn),3,nn); ci_2=reshape(u(7+5*nn: 6+8*nn),3,nn);
ci_1=reshape(u(7+10*nn: 6+13*nn),3,nn);
bi_3=u(7+3*nn: 6+4*nn); bi_2=u(7+8*nn: 6+9*nn);
bi_1=u(7+13*nn: 6+14*nn); w_3= u(7+4*nn: 6+5*nn);
w_2= u(7+9*nn: 6+10*nn); w_1= u(7+14*nn: 6+15*nn); xx=u([6;4;5]);
if t==0
ci_1=w0(1)*ones(3,nn); bi_1=w0(2)*ones(nn,1);
w_1=w0(3)*ones(nn,1); K_pid0=K_pid;
else, K_pid0=u(end-2:end); end
for j=1: nn % Gaussian basis h
h(j,1)=exp(-norm(xx-ci_1(:,j))^2/(2*bi_1(j)*bi_1(j)));
end
dym=u(4)-w_1'*h; w=w_1+xite*dym*h+alfa*(w_1-w_2)+beta0*(w_2-w_3); for j=1:nn
d_bi(j,1)=xite*dym*w_1(j)*h(j)*(bi_1(j)^(-3))*norm(xx-ci_1(:,j))^2;
d_ci(:,j)=xite*dym*w_1(j)*h(j)*(xx-ci_1(:,j))*(bi_1(j)^(-2));
end
bi=bi_1+d_bi+alfa*(bi_1-bi_2)+beta0*(bi_2-bi_3);
ci=ci_1+d_ci+alfa*(ci_1-ci_2)+beta0*(ci_2-ci_3);
dJac=sum(w.*h.*(-xx(1)+ci(1,:)')./bi.^2); % Jacobian
KK=K_pid0+u(1)*dJac*eta_pid.*x; sys=[u(6)+KK'*x; KK; ci(:); bi(:); w(:)];
该控制器中的外部参数均在封装后的控制器参数对话框中给出。
2.RBF神经网络PID控制器Simulink仿真模型
编写好S函数之后,就可以建立其Simulink模型,其步骤是:
(1)输入函数变量名及参数变量名。
单击Simulink模型库中非线性环节的S 函数模块,并拖动到所打开的模型窗口上,双击S函数模块,按照相关的提示输入函数变量名nnrbf-pid和参数名T,nn,xite,alfa。
(2)创建子系统(create subsystem)
(3)屏蔽子系统(mask subsystem)
在屏蔽子系统的对话框中按照提示输入参数变量。
双击该模块也可以对参数进行修改。
RBF神经网络控制器的Simulink模块如图1所示。
其中输入1为给定信号与对象输出信号的误差e(k),输入2为对象输出信号y(k)。
输出1为控制器的输出u(k),输出2为kp,ki,kd三个权值的变化量。
图1 RBF神经网络PID控制器Simulink模型
3. 系统仿真
系统仿真框图如图2所示。
被控对象为一非线性环节,其Simulink 仿真框
图如图3所示,其模型描述为)()1(1)
1()8.01(2.1)(2/1.0t u t y t y e t y T t +-+--=-,其中采样周
期T 为0.001.控制器的参数nn 取6,xite 取0.25,alfa 取0.05.输入为多阶梯波信号,具体参数如图4所示。
图2 系统仿真框图
图3 非线性受控对象
图4 RBF网络PID参数对话框仿真结果分别如图5和图6所示:
00.20.40.60.81 1.2 1.4 1.6
-1
-0.5
0.5
1
1.5
2
图5 多阶梯波信号跟踪曲线
00.20.40.60.81 1.2 1.4 1.6
-0.15
-0.1
-0.05
0.05
0.1
0.15
0.2
图6 kp ,ki ,kd 参数的变化曲线
4.结论
RBF神经网络PID控制器由于采用RBF神经网络在线实时调整PID控制器的三个参数,可以对任意非线性对象实现很好的跟随控制。
由上图5课件,用S 函数实现RBF神经网络PID控制规律的复杂系统仿真模型,仿真结果显示其多阶梯波非线性信号跟踪效果比较理想,同时实现了PID参数的在线调整。
PID参数的变化如图6所示。
仿真程序编写简捷、快速,调试方便。
参考文献
[1]刘金琨.先进PID控制MATLAB(第3版)[M].北京:电子工业出版社,2011.3
[2]薛定宇.控制系统计算机辅助设计——MATALAB语言与应用[M].北京:清华大学出版社,2006
[3]李绍铭,赵伟.基于S函数的RBF神经网络PID控制器Simulink仿真[J].安徽冶金科技职业学院学报,2008。