基于CMOS图像传感器IBIS5_A_1300的成像系统设计_英文_
基于CMOS图像传感器IBIS5-A-1300的时序设计

基于CMOS图像传感器IBIS5-A-1300的时序设计邢汝佳;张伯珩;边川平;伦向敏;闵剑;车嵘【期刊名称】《科学技术与工程》【年(卷),期】2006(6)21【摘要】在分析CYPRESS公司的IBIS5-A-1300 CMOS时序的基础上,设计了串行、并行两种配置寄存器的模式,完成了多斜率积分、开窗口、亚采样功能.选用复杂可编程器件(CPLD)作为硬件设计载体,使用VHDL语言对驱动时序发生器进行了硬件描述.采用QuartusⅡ5.0软件对所做的设计进行了功能仿真,针对ALTERA公司的CPLD器件MAXⅡEPM570T144C3进行适配.系统测试结果表明,所设计的驱动时序发生器满足CMOS相机驱动要求.【总页数】5页(P3422-3426)【作者】邢汝佳;张伯珩;边川平;伦向敏;闵剑;车嵘【作者单位】中国科学院西安光学精密机械研究所,西安,710068;中国科学院研究生院,北京,100039;中国科学院西安光学精密机械研究所,西安,710068;中国科学院西安光学精密机械研究所,西安,710068;中国科学院西安光学精密机械研究所,西安,710068;中国科学院研究生院,北京,100039;中国科学院西安光学精密机械研究所,西安,710068;中国科学院研究生院,北京,100039;中国科学院西安光学精密机械研究所,西安,710068;中国科学院研究生院,北京,100039;中国人民解放军西安通信学院,西安,710106【正文语种】中文【中图分类】TP2【相关文献】1.基于FPGA的CMOS图像传感器LUPA-4000时序设计 [J], 陈彦;张宏伟;林宏宇2.基于CPLD的面阵CMOS图像传感器的驱动时序设计 [J], 甘玉泉;高伟;董钊3.基于CMOS图像传感器IBIS5-A-1300 的成像系统设计 [J], 顾晓;高伟;马冬梅;林静4.超大阵列CMOS图像传感器时序控制驱动电路设计 [J], 高静;张天野;聂凯明;徐江涛5.基于IBIS5-A-1300 CMOS图像传感器的噪音抑制技术研究 [J], 胡晓东;姚岚;彭鑫因版权原因,仅展示原文概要,查看原文内容请购买。
基于CPLD硬件提升帧率的图像采集系统

基于CPLD硬件提升帧率的图像采集系统朱兵;曾延安;张南洋生;张超;张力【摘要】The CCD image acquisition system usually adopts the algorithmto enhance image acquisition frame rate,however, the unreal image frame data increased by the technology can cause a decline in imagequality.Therefore,the image acquisition sys-tem based on CPLD ( Complex Programmable Logic Device) hardware improving frame rate and corresponding hardware system were developed.By analyzing the timing sequence chart of ICX285AL CCD sensor produced by Sony Corporation,the frame rate was improved by compressing the redundancy time of a frame to the minimum and increasing the speed of producing pixel data based on the improvement of the speed of image collection.The frame is real image data collected by CCD image collector,guaranteeingthe reality and integrity of the data.The experiments demonstrate the feasibility,stability and operability of this system,and can be used in other CCD sensor image acquisition systems.%目前的CCD图像采集系统中通常采用算法提升图像采集帧率,然而该技术所增加的不真实图像帧数据会导致图像质量下降。
基于CMOS的机器人视觉系统设计

基于CMOS的机器人视觉系统设计马宁【期刊名称】《太赫兹科学与电子信息学报》【年(卷),期】2012(010)001【摘要】According to the characteristics of robot duty, this study designed a monocular vision system. With Complex Programmable LogicDevice(CPLD) to form the control timing sequence, a Complementary Metal Oxide Semiconductor(CMOS) image sensor was adopted to build up a hardware platform with a resolution of 0.3 M pixel. Based on the simplified Hue Saturation Intensity(HIS) color model, the object status could be judged with a sampling method. The high-performance Digital Signal Processing(DSP) processor used could provide image processing and motion control functions simultaneously. The algorithm was verified with Matlab and then ported to DSP. Experimental result has shown that the system can implement the status judgment successfully.%针对机器人系统任务的特点,设计了一种单目视觉系统.采用CMOS图像传感器,通过CPLD形成控制时序,搭建了30万像素分辨力的硬件系统.基于简化的HSI颜色模型,并采用抽样方法,实现了对象状态的判断;系统采用高性能DSP器件,在进行图像处理的同时实施机器人的运动控制.系统软件算法在Matlab下进行了仿真并移植于DSP.实验结果表明,该系统实现了特定对象的状态判别功能,并具有良好的实时性.【总页数】5页(P124-128)【作者】马宁【作者单位】东北大学,辽宁沈阳110819【正文语种】中文【中图分类】TN433;TP242.6【相关文献】1.基于CMOS摄像头循迹的智能车控制系统设计 [J], 郑亚利;古训2.基于GL0816传感器的高速线阵CMOS相机系统设计 [J], ZHANG Jun-liang;QI Tao;LI Hui;QIAO Jian3.基于CMOS传感器和FPGA的图像采集系统设计 [J], 孔德可; 钟升; 匡乃亮; 赵超4.基于CMOS图像传感器的以太网传输系统设计 [J], 曹鹏飞5.基于近红外CMOS的激光光斑质心检测系统设计 [J], 王雪松因版权原因,仅展示原文概要,查看原文内容请购买。
aps cmos星敏感器 系统原理及实现方法
APS(Active Pixel Sensor)CMOS 星敏感器是一种采用CMOS 技术制造的数字成像设备,用于捕捉和处理星体图像。
其工作原理主要是通过检测星体图像的特征,用于航天器姿态控制和导航。
以下是APS CMOS 星敏感器系统的基本原理及实现方法:
1. 系统原理
APS CMOS 星敏感器基于主动像素传感技术,每个像素都具有独立的光电转换和信号读取功能。
在成像过程中,光子撞击像素单元,将其转化为电信号。
信号读取电路将电信号转换为数字信号,并按照预定的格式输出。
2. 星敏感器核心组件
(1)CMOS 图像传感器:作为星敏感器的核心元件,CMOS 图像传感器将光信号转换为电信号。
常见的CMOS 图像传感器类型包括APS、BSI(Back-Side Illuminated)等。
(2)信号处理电路:对CMOS 图像传感器输出的电信号进行放大、滤波、模数转换等处理,得到数字化的星体图像。
(3)星体识别算法:通过分析星体图像的特征,例如星点的形状、亮度等,实现星体的识别和定位。
(4)姿态解算模块:根据星体的识别结果,结合预先存储的星表数据,计算航天器的姿态信息。
3. 实现方法
(1)硬件实现:设计并制造具有高性能的CMOS 图像传感器,提高星敏感器的灵敏度和信噪比。
(2)软件实现:开发星体识别算法和姿态解算模块,实现对星体图像的实时处理。
(3)系统集成:将CMOS 星敏感器、信号处理电路、星体识别算法等组件集成到一个紧凑的系统中,便于安装和使用。
(4)标定与优化:针对不同的应用场景,对星敏感器进行标定和优化,提高系统性能。
CMOS图象传感器IBIS5A应用设计

CMOS图象传感器IBIS5A应用设计
王冶;刘金国;李广泽;周怀得;孔德柱
【期刊名称】《微计算机信息》
【年(卷),期】2011(27)1
【摘要】IBIS5A_1300_5(以下简称IBIS5)是FILLFACTORY公司生产的IBIS系列固态CMOS图象传感器.片上集成了偏置增益放大器、模数转换器和控制接口.其像元总数1280×1024,有2种工作模式.最高象元读出频率40MHz,最高帧频为27.5fps,满帧周期36ms.IBIS5的时序逻辑由XILINX公司生产的XC95144产生,由JTAG接口可以在线对IBIS5的控制时序进行实时修改.对于传感器产生的视频数字信号需要进行长距离传输,为避免信号衰减,本次设计采用LVDS传输协议与上位机进行数传.
【总页数】3页(P74-75,202)
【作者】王冶;刘金国;李广泽;周怀得;孔德柱
【作者单位】130033,长春,中国科学院长春光学精密机械与物理研究所;130033,长春,中国科学院长春光学精密机械与物理研究所;130033,长春,中国科学院长春光学精密机械与物理研究所;130033,长春,中国科学院长春光学精密机械与物理研究所;130033,长春,中国科学院长春光学精密机械与物理研究所
【正文语种】中文
【中图分类】TN431.2;TN47
【相关文献】
1.CMOS图象传感器 [J], 董守愚
2.Micron发布130万像素SOC CMOS图象传感器 [J],
3.CMOS有源象素图象传感器 [J], 赵文伯
4.CMOS图象传感器的原理及应用 [J], 程开富
5.CMOS图象传感器技术及其研究进展 [J], 林凡;吴孙桃;郭东辉
因版权原因,仅展示原文概要,查看原文内容请购买。
CMOS图像传感器IBIS5-B-1300的驱动时序设计

CMOS图像传感器IBIS5-B-1300的驱动时序设计CMOS图像传感器产生于20世纪80年代,由于当时CMOS工艺的制造技术不高,以至于传感器在应用中的杂讯较大,商品化的进程一直很慢。
至今,随着工艺的不断提高,CMOS图像传感器的应用范围也不断扩大,涉及到数码产品、通讯、工业,医疗等各领域。
与CCD相比,CMOS图像传感器具有体积小,功耗低,成本低等特点。
Cypress公司的CMOS 图像传感器IBIS5-B-1300是一款高性能、大动态范围的图像传感器。
图像传感器的正常工作需要有正确的驱动时序信号,本文就图像传感器IBIS5-B-1300,给出采用VHDL语言设计的驱动时序和仿真结果。
1 IBIS5-B-1300图像传感器1.1 芯片简介Cypress公司的IBIS5-B-1300将模拟图像获取、数字化和数字信号处理的功能集成在单一芯片中,是一款高性能的CMOS图像传感器。
这款130万像素(1 280×1 024)的图像传感器可以采用SXGA或VGA格式输出,帧频可达27.5 f/s(1 280×1 024)或106 f/s(640×480)。
其主要特点如下:(1)6.7μm的高填充因子像素单元。
它可使器件的灵敏度较高,噪声较小。
(2)高的动态范围(单斜率积分下为64 dB)。
当采用双斜率积分或多斜率积分时,动态范围可进一步提高。
(3)片载可调整增益和偏置的输出放大器。
它能使信号的抖动限制在片载10 b ADC的输入范围之内。
(4)片载40 MHz的10 b ADC。
它可直接对输出模拟信号进行模/数转换,该ADC在电气上与图像传感器分离,如果需要,可选择不经模/数转换而直接输出模拟信号。
(5)随机开窗模式和亚采样模式。
随机开窗模式可以只对感兴趣的区域进行读出;亚采样模式可以很好地满足图像压缩的需要。
(6)片载时序与控制逻辑序列发生器、内部寄存器。
它可使得设计者用较少的信号来控制传感器的工作。
安森美半导体推出先进的1300万像素CMOS图像传感器,采用SuperPD^TM PDAF技术

到 0.002 NM以 内,多余力矩 消除程度约 为 88.24%。可见 引入
A=(Ⅳl—Ⅳ2),Ⅳl×10o% m Ⅲ 0 (1m4 ) m 前馈 补偿 达 到 了 良好 的 抑 制 多余 力 矩 的 效 果 。 其 中 ,Ⅳl、Ⅳ2分 别 为补 偿 前 、后 的多 余 力矩 。该 指 标 用 于
所 示 。
入 力 矩 微 分 负 反 馈 、PI调 节 以及 前 馈 补 偿 对 系 统 进 行 校 正 。
满 足 高 精 度 、快 响 应 、强 稳定 性 的 控 制 要 求 ,实 现 对 负 载 的 精
o
差 。
采 一 。
确 模 拟 。 经 过 MATLAB/Simulink仿 真 验 证 了 系统 可 行 ,并 且 满 足 负载 模 拟 器 的评 价 指标 。 参 考 文献 : [1】谭 建 成 .永磁 无 刷 直 流 电机 技 术 [M】.北 京 :机 械 工 业 出版
陈 家新 ,等 电动 负载模 拟 系统仿 真研 究
力 矩 的 百 分 比来 评 价 其 性 能 。 即 指 定 频 率 范 围 内 。多 余 力 矩
补偿 前 的 多 余 力 矩 最 大 为 0.017 NM 左 右 。补 偿 后 减 小
抑制量 占系统补偿前 多余力矩 的百分 比。公式如下 :
一
社 .2011.
- o
[2】唐 任 远 .现 代 永 磁 电机【M】.北 京 :机 械 工 业 出版 社 ,1997.
I/
(a)补偿前的多余 力矩
【3】李 志 民 ,张 遇 杰 .同 步 电动 机 调 速 系统 [M】.北 京:机 械 工 业
出 版 社 .1996.
[4]李晓竹 ,杰静.混合动 力电动汽车 用永磁 无刷 直流电机的
A CMOS image sensor for low light applications

Reset N in
Col bus
Байду номын сангаас
I. INTRODUCTION
The main challenges for CMOS imagers in industrial and scientific applications are their relatively large dark current and random noise, especially at low light. To increase both signal to noise ratio (SNR) and dynamic range (DR) of a CMOS image sensor, prior efforts focused on reduction of reset noise, the dominant temporal noise component of an active pixel sensor (APS), with significant improvement of performance [1]–[3]. Reduction of dark current mainly relies on specialized CMOS imaging processes. Though dark currents less than 0.5nA/cm2 have been reported [4], the spatial distribution was non-uniform and not well-behaved. Pain et al. [5] suggest that dark current may set the ultimate noise limit in CMOS imagers.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
H< SG8 V6S8<S HT G;IG5T;?? T6FSH9 )B$ S8FG<H?HIJ HT A;?? A6FSH9J %$ #3% A;?? T6FSH9 HT 11bc B86= dL @ AA HT +-eO
#+% #VS;F6? KJ<67;F 96<I8a 1/ K& #*1,,a*% ;<
!
"#$ %&&’()*+(,- ,. +#$ /0*1$ 2$-3,4
P?5 1<;21@2 ABA>5< E;A5: 7@ !"#$ 1<;25 A5@A74 8;@ <55> >?5 45Q3145<5@> 7= 67R D7R54 87@A3<D>17@! 5;AB <;@1D36;>1@2 ;@: 67R 87A> E5>>54 >?;@ !!MK $7 ?545 1A >?5 :5A12@ =74 >?5 1<;21@2 ABA>5< E;A5: 7@ %&%$’()(.+--K !56 "#$ %4)#(+$)+74$ ,. +#$ 383+$0 012345 / 1663A>4;>5A >?5 ;48?1>58>345 7= >?5 1<;21@2 ABA>5<K P?5 0SI) T!F$.’ E567@2A >7 $D;4>;@(%% A5415A <;@3=;8>345: EB T161@UK $D;4>;@(%% ?;A?12? D54=74<;@85 ;> ;@ 5U85D>17@;66B 67R D4185K 074 5U;<D65! 1>A ABA>5< D54=74<;@85 1A A3DD74>5: 3D >7 F-- "VW ;@: =5;>345A 1@863:5 E6789 X)" #>7 ’Y 9E1>A$! .Y A5658>;E65 %Z# A>;@:;4:A! ;@: =734 MCCA %M56;BO67895: C77D&K P?5 0SI) ?;A >?5 =7667R1@2 =3@8>17@A’/(" $3DD6B >1<1@2O87@>476 A12@;6A >7 >?5 1<;25 A5@A74 ;@: 23;4;@>55 1> 1A 1@ 277: 43@@1@2 A>;>3A )
第’卷
第 ./ 期
3--’ 年 0 月
科 学 技 术 与 工 程
MH?E ’
NHO ./
PQ?J 3--’
.10. (.2.’ #3--’%./ (-410 (-/ $F;8<F8 D8FG<H?HIJ %&%$’()(*+,6<K L<I;<889;<I 顾 晓 ! 等 " 基于 的成像系统设计 F ./ 期 !"#$ 图像传感器
#1% :HU T;@8K V6SS89< <H;R8 #g,O’e _"$%O
3--’ 年 + 月 .2 日收到
第 一 作 者 简 介 " 顾 晓 ! 男 ! 硕 士 研 究 生 ! 研 究 方 向 "!"#$ 图 像 传 感 器 研究与成像系统设计 (
]JZ
科
学
技
术
与
工
程
!卷
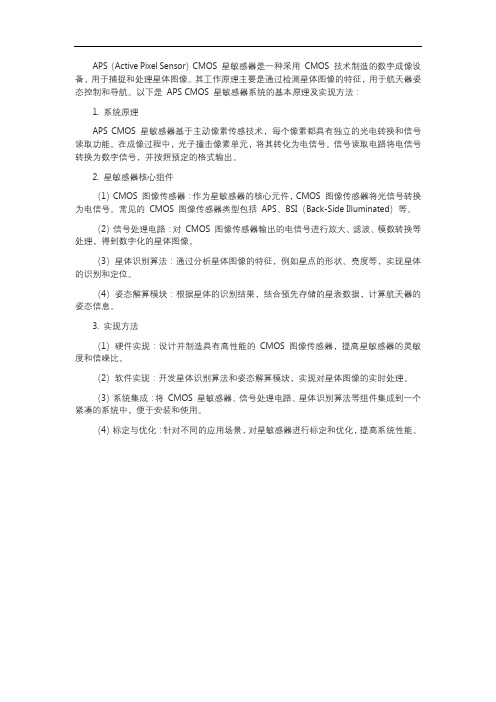
!"# $%&’()*+, "#$#" %&’(’)*’+)(’,& -.(/0 1,2/0 ,& (3/ ’4)5/ 6/&6,0 7879:;7;< 63,=*> ?/ )11*’/> .,0 4’&’4)* ! 7879@AB@C 1/0’,>6 (, )66=0/ ) 10,1/0 0/6/( ,. (3/ ,&DE3’1 6/F=/&E/0 )&> (’4’&5 E’0E=’(0G# -** ’&(/0&)* 0/5’6(/0 2’** ?/ 6/( (, H ).(/0 7879:;7;< ’6 )11*’/># "#$#$ @,&.’5=0)(’,& ,. (3/ ’&(/0&)* 0/5’6(/06 <3/0/ )0/ 6’I(//& "J ?’( D0/5’6(/06 ’& (3/ ’4)5/ 6/&6,0# -.(/0 E,&.’5=0)(’,& ,. (3/6/ 0/5’6(/06 (3/ 6/&6,0 E)& 0=& ’& 4=*(’1*/ 2,0K’&5 4,>/6# <2, >’../0/&( >)() ’&(/0.)E/6 )0/ ’41*/4/&(/> ! 1)0)**/* ’&(/0.)E/ )&> 6/0’)*DLD2’0/ ’&(/0.)E/# <3/G E)& ?/ 6/*/E(/> =6’&5 1’&6 %M9NBO; )&> 7;:9NBO;# %& "JD?’(6 E,&.’5=0)(’,& >)()! =11/0 P ?’(6 )0/ )>>0/66 ?’(6 )&> *,2/0 "$ ?’(6 )0/ >)() ?’(6# "#$#L %&(/50)(’,& )&> 0/)>,=( M’5=0/ $ 1*,(6 (3/ (’4’&5 D>’)50)4 ,. (3/ 0,**’&5 E=0()’& 63=((/0 ,1/0)(’,&# 897<-:< )&> 89@AB@C ! (2, ’&1=( 6’5&)*6 ! ’&>’E)(/ (3/ 6()0( ,. ) .0)4/ )&> (3/ 6()0( ,. ) *’&/ 0/61/E(’Q/*G# R%S;A9T-A%O ",=(1=( 6’5&)*# 5,/6 3’53 23/& (3/ 0/)>,=( ,. (3/ 1’I/*6 ’6 6()0(/># %( 5,/6 *,2 ).(/0 ) E,41*/(/ 0,2 0/)> ,=(# 7, (3/ =6/0 E)& =6/
3--’
$F;E D8FGE L<I<IE
基于!"#$图像传感器%&%$’()(*+,的成像系统设计
顾 晓!!" 高 伟! 马冬梅!!" 林 静!!"
# 中国科学Βιβλιοθήκη 西安光学精密机械研究所 .! 西安 0.--12 $ 中国科学院研究生院 3! 北京 .,,,+4 %
摘
要
介绍 !"#$ 图像 传 感 器 %&%$’5)5.+-- 的 内 部 结 构 & 主 要 特 征 和 工 作 过 程 $ 对 !67896 :;<= 接 口 的 原 理 和 优 势 做 了 简 介 $
# -(.&’( /*,0 1,)&’2(3&
@)4/0) A’&K ’6 ) E,44=&’E)(’,& ’&(/0.)E/ .,0 Q’6’,& )11*’E)(’,&6# <3/ ’&(/0.)E/ /I(/&>6 (3/ ?)6/ (/E3&,*,5G ,. @3)&&/* A’&K "?)6/> ,& ATO7$# @3)&&/* A’&K E,&6’6(6 ,. ) >0’Q/0 )&> 0/E/’Q/0 1)’0# <3/ >0’Q/0 )( (3/ E)4/0) )EE/1(6 $Z 6’&5*/ D/&>/> >)() 6’5&)*6 )&> ) 6’&5*/D/&>/> E*,EK# <3/ >)() ’6 6/0’)*’+/> [\" ! )&> (3/ .,=0 >)() 6(0/)46 )&> ) >/>’E)(/> E*,EK )0/ >0’Q/& ,Q/0 .’Q/ ATO7 1)’06# <3/ 0/E/’Q/0 )EE/1(6 (3/ .,=0 ATO7 >)() 6(0/)46 )&> ATO7 E*,EK ! )&> (3/& >0’Q/6 (3/ $Z ?’(6 )&> ) E*,EK (, (3/ .0)4/ 50)??/0 %L &# <3/ >)() (0)&64’66’,&
&6789 :1;24;< 7= !;<54; C1@9 1@>54=;85
4;>5A 7= >?5 !?;@@56 C1@9 8?1DA5> 8;@ E5 3D >7 FG+H IE1>AJAK !7445AD7@:1@26B! >?5 =734 CLM$ D;14A ;45 45A54N5: =74 >?5 25@54;6 OD34D7A5 8;<54; 87@>476K P?5B ;45 :5=1@5: ;A 8;<54; 1@D3>A ;@: =4;<5 24;EE54 73>D3>AK