卫星基座大样图(标准)
RTK(1+1)简单操作说明

RTK(1+1)简易使用手册RTK由两部分组成:基准站部分和移动站部分。
其操作步骤是先启动基准站,后进行移动站操作,最后用USB数据线或SD存储卡将所采集的数据传输到微机上。
基准站部分1)基准站安装1.在基准站架设点上安置脚架,安装上基座,再将基准站主机用连接器安置于基座之上,对中整平(如架在未知点上,则大致整平即可)。
注意:基准站架设点可以架在已知点或未知点上,这两种架法都可以使用,但在校正参数时操作步骤有所差异.2. 安置发射天线和电台,将发射天线用连接器安置在另一脚架上,将电台挂在脚架的一侧,用发射天线电缆接在电台上,再用电源电缆将主机、电台和蓄电池接好,注意电源的正负极正确(红正黑负)。
注意:主机和电台上的接口都是唯一的,在接线时必须红点对红点,拔出连线接头时一定要捏紧线头部位,不可直接握住连线强行拨出。
2)主机操作1.打开主机轻按电源键打开主机,主机开始自动初始化和搜索卫星,当卫星数大于5颗,PDOP值小于3时,基准站会自动启动。
主机发射后,电台TX灯开始每秒钟闪1次,表明基准站开始正常工作。
2.打开电台在打开主机后,打开电台。
轻按电台上的“ON/OFF”按钮打开电台.注意:为了让主机能搜索到多数量卫星和高质量卫星,基准站一般应选在周围视野开阔,避免在截止高度角15度以内有大型建筑物;避免附近有干扰源,如高压线、变压器和发射塔等;不要有大面积水域;为了让基准站差分信号能传播的更远,基准站一般应选在地势较高的位置。
移动站部分1)移动站安装将移动站主机接在碳纤对中杆上,并将接收天线接在主机底部,同时将手簿使用托架夹在对中杆的适合位置。
2)主机与手簿操作1.打开主机轻按电源键打开主机,主机开始自动初始化和搜索卫星,当达到一定的条件后,主机上的DL指示灯开始1秒钟闪1次(必须在基准站正常发射差分信号的前提下),表明已经收到基准站差分信号。
2.打开手簿按住<ENTER/ON>至少1秒,即可打开。
EPIRB

定位精度一般在2~3海里;同时又能降低对 EPIRB的发射功率需求。 (2)静止轨道卫星示位标:其内部装有GPS,把 GPS的位置信息通过示位标发送出去。 系统共有两种工作模式:实时模式和全球覆盖模式。
信标的特点和作用
陆用个人信标(PLB) 工作频率:406MHz 工作方式:人工启动。
航空信标(ELT)
工作频率: 121.5MHz/243MHz
工作方式:撞击或人工 启动。
信标的特点和作用(续)
船用信标(EPIRB)
工作频率:406MHz
寻位频率: 121.5MHz/243MHz
启动方式:人工启动、 自动启动。
正常工作 正常工作 正常工作
正常工作 正常工作 正常工作
停止工作
不具备
正常工作
不具备
低轨道搜救卫星运行情况表
卫星的作用
接收示位标发射的信号 信号处理 信号转发
返回
③陆地用户终端/地面站 (LUT-local unit terminal)
作用:
①跟踪搜救卫星并接收卫星转发下来的遇险 示位信标信号和数据,然后解码、计算出示 位标识别码和位置数据,
440066MMHHzzGGPPSS
FFloloaat-t-ffrreeeeEEPPIIRRBBss ffoorrmmaarritiitmimeeuussee
EELLTTssffoorraairirccrraafftt
775500,0,00000bbeeaaccoonnssinin sseerrvviciceewwoorrldldwwididee
2007年发射覆盖 亚太
卫星结构设计与分析(上)

马佳 2019.01.02
目录
Contents
01
概论
02
技术基础
03
卫星结构
设计
04
卫星结构
材料
05
卫星结构
分析
06
卫星结构
设计验证
卫星结构和机构概论
●卫星结构和机构的功能
1
● 卫星结构机构设计特点
●卫星结构机构分类
●卫星结构机构研制程序
卫星结构和机构概论
结构机构功能
承受 载荷
0.25
复合材料结构的安全裕度
强度
0.25
按首层破坏方式计
算
稳定性
0.30
卫星结构材料
●概述
4
●金属材料
●复合材料
●结构材料的选择
●结构材料的应用和发展
卫星结构材料
概述
材 料 的 工 作 环 境
减小卫星结构质量
较小的线膨胀系数,较高的 比热容,良好的额热导率
材料的总质量损失不大于1%, 收集挥发性冷凝物不大于 0.1%。
结构瞬态响应和冲击响应分析
由于结构瞬态响应和冲击响应对卫星的影响不是很严重,因 此在进行结构响应分析时可部分忽略。
卫星结构分析
结构热效应
热变 形
热辗 轧
热弹 性冲 击
热引 起的 结构 运动
热颤 振
热振 动
●热变形:由温度缓慢变化及其分 布的不均匀性导致的结构产生的准 静态变形 ●热弹性冲击:由温度突变导致卫 星上柔性结构产生的瞬态飞振荡运 动 ●热振动:由准静态变形和周期振 荡运动叠加而成 ●热颤振:是结构的热致非稳态振 动响应 ●热辗轧:伸展机构元件间的热黏 附—滑移运动可能导致结构的非线 性运动
locata定位系统
3LocataLiteC接收到从LocataLiteA和B发射的信号,并且通过观测GPS卫星来确定自身出的位置。通过调节温控晶振使得发射的C/A码信号与LocataLiteA和B的C/A码信号时钟同步。
4对于LocataLiteD也按照步骤3确定出自身位置,以及与LocataLiteA,B和C信号时钟同步,这样4颗LocataLiteA,B,C和D都已经确认自身位置并且信号都实现了时钟同步,然后通过双向测距技术计算出两两之间的距离。这时不再需要GPS定位星座,由这4颗LocitaLite将构成一个独立的定位系统,当一个Locata在系统中移动时可以根据三角测量法确定其位置。
2.2
LocataNet系统采用TimeLoc技术来使得所有的LocataLites伪卫星时钟同步,可以分为以下几个步骤:
1首先利用一个LocataLiteA对4颗甚至更多的GPS卫星进行观测,来精确定出自己所在的3维位置,然后LocataLiteA利用其Locata的信号开始发射C/A码测距信号;
但是,“LocataLite作为一套独立定位系统,需要进行特别维护。”用户现阶段可能仍然会选择美国、俄罗斯的GPS服务,而避免繁杂的系统维护过程。
3
澳大利亚Locata公司研制的Locata定位系统。目前的性能指标已经具备很强的工程应用价值,具体指标如下表所示:
卫星定位测量 RTK控制测量的要求和注意事项

RTK控制测量的要求和注意事项1.RTK测量的具体步骤及注意事项(1)架设基准站。
在进行RTK图根测量中,首先进行基准站假设,基准站架设点必须满足以下要求:①基准站精度的高低直接影响到测量点的精度,所以在工作中要选择高等级有经过水准连测的已知控制点作为基准点。
②基准站周围要视野开阔,卫星截止高度角应超过15度,周围无信号发射物(大面积的水域、大型建筑物等),以减少多路径效应干扰。
并且要尽量避开交通要道、过往行人的干扰。
③基准站应尽量架设于测区内相对制高点上,以方便传播差分改正信号。
④基准站要远离微波塔、通信塔等大型电磁发射源200米外,要远离高压输电线、配电线、通讯线50米外。
⑤RTK在作业期间,基准站不能移动或者关机重新启动,如果重新启动必须进行重新校正。
基准站连接必须正确,注意蓄电池的正负极。
(2)流动站设置。
1个流动站只需1名测量员通过手簿进行测量操作。
连接好流动站接收机、天线、测杆后,先进行测量类型,电台的配置,使其与基站无线电连接,输入流动站的天线高,输入观测时间、次数,设置机内精度。
(3)校正测量。
由于基准站设置于未知点上,因此必须对已知点进行校正测量,才能在手簿上求解出WGS-84坐标与当地坐标系之间的转换参数。
校正点的数量视测区的大小而定,一般取3~6点为宜。
在手簿中输入校正点的当地坐标,流动站置于校正点上测量出该点的WGS-84坐标,将所选的校正点逐一测量后,通过手簿上的点校正计算即可求解出转换参数。
点校正测量结束后,先在已知点上测量,检查转换参数无误时才能进行新的测量。
(4)图根点控制测量。
图根点的布设应该以点组的形式出现,每组应有两个或者三个两两通视的图根点组成,以便于安置全站仪测量时定向和测站检核,图根点之间的距离应随点位而定。
图根点测量时只需在测站上输入点名、按提示测量存储,正常情况下,5s即可结束一个点的观测。
(5)注意事项①RTK测量误差与流动站至基准站的距离成正比,因此解求转换参数的已知点应分布均匀,覆盖整个测区,水平、垂直残差宜在3.5cm以下。
精密控制B级GPS网技术设计
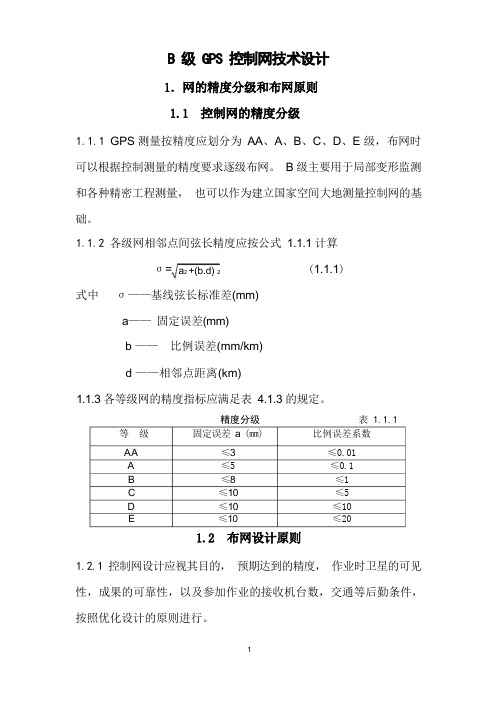
1.1.1 GPS 测量按精度应划分为AA、A、B、C、D、E 级,布网时可以根据控制测量的精度要求逐级布网。
B 级主要用于局部变形监测和各种精密工程测量,也可以作为建立国家空间大地测量控制网的基础。
1.1.2 各级网相邻点间弦长精度应按公式1.1.1 计算σ= a2 +(b.d) 2 (1.1.1)式中σ——基线弦长标准差(mm)a——固定误差(mm)b ——比例误差(mm/km)d ——相邻点距离(km)1.1.3 各等级网的精度指标应满足表4.1.3 的规定。
精度分级表1.1.1 等级固定误差a (㎜) 比例误差系数AA ≤3 ≤0.01A ≤5 ≤0.1B ≤8 ≤1C ≤10 ≤5D ≤10 ≤10E ≤10 ≤201.2.1 控制网设计应视其目的,预期达到的精度,作业时卫星的可见性,成果的可靠性,以及参加作业的接收机台数,交通等后勤条件,按照优化设计的原则进行。
1.2.2 控制网的设计应满足下列准则:(1) 精度设计应满足表1.1.1 中相应等级的指标;(2) 按下式计算的网的平均可靠率r 应大于0.25~ rr (1.2.2)n式中 r ——控制网中多余观测数;n ——控制网中的总观测数。
(3) 基准设计应满足投影变形限值的要求。
1.2.3 控制网应由一个或者若干个独立观测环构成。
当网的可靠性和精度要求较高时,宜采用三角形网或者大地四边形网;当精度要求较低时,可采用四边形网、导线环、附合路线或者包括这些布网形式的混合网。
普通不得用单基线定点。
1.2.4 AA、A、B 级控制网普通应布设成连续网,除边缘点外,每点的连接点应不少于3 个。
1.2.5 控制网同步图形之间的连接应采用边联式或者网联式。
当精度要求不高时,也可采用点联式布网,但应加强全网定位结果的检核,防止粗差浮现。
1.2.6 控制网最简独立闭合环或者附合路线边数应符合表 1.2.6 的规定。
最简独立环或者附合路线边数的规定表 1.2.6等级闭合环或者附合路线边数E≦10D≦8A≦5C≦6B≦61.2.7 各级 GPS 控制网相邻点间平均距离应符合表 1.2.7 的规定。
卫星天线安装图解
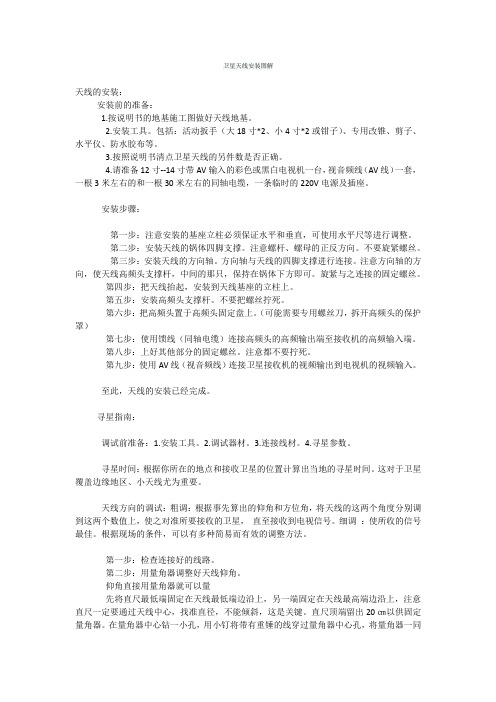
卫星天线安装图解天线的安装:安装前的准备:1.按说明书的地基施工图做好天线地基。
2.安装工具。
包括:活动扳手(大18寸*2、小4寸*2或钳子)、专用改锥、剪子、水平仪、防水胶布等。
3.按照说明书清点卫星天线的另件数是否正确。
4.请准备12寸--14寸带AV输入的彩色或黑白电视机一台,视音频线(AV线)一套,一根3米左右的和一根30米左右的同轴电缆,一条临时的220V电源及插座。
安装步骤:第一步:注意安装的基座立柱必须保证水平和垂直,可使用水平尺等进行调整。
第二步:安装天线的锅体四脚支撑。
注意螺杆、螺母的正反方向。
不要旋紧螺丝。
第三步:安装天线的方向轴。
方向轴与天线的四脚支撑进行连接。
注意方向轴的方向,使天线高频头支撑杆,中间的那只,保持在锅体下方即可。
旋紧与之连接的固定螺丝。
第四步:把天线抬起,安装到天线基座的立柱上。
第五步:安装高频头支撑杆。
不要把螺丝拧死。
第六步:把高频头置于高频头固定盘上。
(可能需要专用螺丝刀,拆开高频头的保护罩)第七步:使用馈线(同轴电缆)连接高频头的高频输出端至接收机的高频输入端。
第八步:上好其他部分的固定螺丝。
注意都不要拧死。
第九步:使用AV线(视音频线)连接卫星接收机的视频输出到电视机的视频输入。
至此,天线的安装已经完成。
寻星指南:调试前准备:1.安装工具。
2.调试器材。
3.连接线材。
4.寻星参数。
寻星时间:根据你所在的地点和接收卫星的位置计算出当地的寻星时间。
这对于卫星覆盖边缘地区、小天线尤为重要。
天线方向的调试:粗调:根据事先算出的仰角和方位角,将天线的这两个角度分别调到这两个数值上,使之对准所要接收的卫星,直至接收到电视信号。
细调:使所收的信号最佳。
根据现场的条件,可以有多种简易而有效的调整方法。
第一步:检查连接好的线路。
第二步:用量角器调整好天线仰角。
仰角直接用量角器就可以量先将直尺最低端固定在天线最低端边沿上,另一端固定在天线最高端边沿上,注意直尺一定要通过天线中心,找准直径,不能倾斜,这是关键。
工程测量GPS使用指南

GPS测量技术与应用实训指导书GPSCeLiangYuanLI YuYingYongShiXi ZhiDaoShu目录第一部分 GPS测量实验与实习须知...............................一、实验与实习一般要求 .......................................二、使用仪器规则 .............................................1·仪器的携带...............................................2·仪器的安装...............................................3·仪器的使用...............................................4·仪器的搬迁...............................................5·仪器的装箱............................................... 三﹑外业记录规则 ............................................. 第二部分 GPS测量实习项目..................................... 实验一南方北极星9600型单频GPS接收机的认识 ................ 实验二9600型GPS接收机野外数据采集 ......................... 实验三南方北极星9600型单频GPS接收机数据下载............... 实验四基线解算............................................... 实验五GPS网平差............................................. 实验六南方GPS数据处理软件4.4软件的功能..................... 第三部分 GPS测量教学综合实训..................................一、实习目的 .................................................三、测区概况 .................................................五、实习要求 .................................................六、上交成果 .................................................七、成绩评定 ................................................. 附 GPS测量技术要求...........................................一、GPS测量精度、密度标准及分类..............................二、GPS网的基准设计..........................................三、拟定外业观测计划 .........................................四、技术设计书编写 ...........................................五、GPS测量的外业实施........................................六、观测工作 (II)七、内业数据处理 ............................................. 附录1 GPS实习报告............................................第一部分 GPS测量实验与实习须知《GPS测量原理及应用》的理论教学、实验和实习教学是本课程的三个重要的教学环节,基本原则是:坚持理论与实践相结合,注重仪器操作、软件使用,在实践中真正掌握GPS测量的基本原理和技术应用。