基于Canny算子的边缘检测及评价_林卉
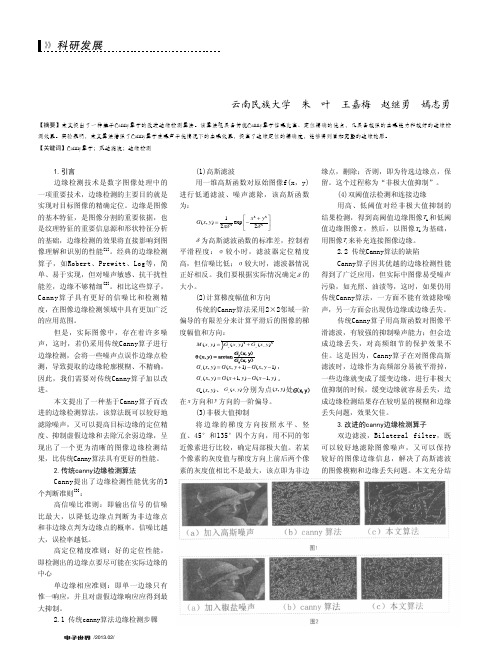
基于canny算子的改进边缘检测算法
Gx ( x, y ) G ( x, y 1) G ( x, y 1) , G y ( x, y ) G ( x 1, y ) G ( x 1, y ) 。
Gx ( x, y ) 、 G y ( x, y ) 分别为点 ( x, y ) 处
在 x 方向和 y 方向的一阶偏导。 (3)非极大值抑制 将边缘的梯度方向按照水平、竖 直、45°和135°四个方向,用不同的邻 近像素进行比较,确定局部极大值。若某 个像素的灰度值与梯度方向上前后两个像 素的灰度值相比不是最大,该点即为非边
1.如何保证物业系统的成功实施 项目的成功实施离不开管理层的支 持,配套推行相应的管理制度,如公司 规定:业务人员每天要将信息及时录入系 统,作为公司、集团层面分析的依据,公 司根据系统中的业务资料,作为主要分析 的依据,同时每月对业务员做量化考评。 通过管理考评体系配合管理软件在基层的 实施取得很好的效果,有效的提高出租率 和收费数据分析精密度。强调将配套的制 度和软件有机结合起来。一方面作为一套 好的管理软件中应该带有完整的管理考核 体系配套,另一方面管理制度的执行同样 也需要管理软件的支撑和实现。 合双边滤波和Canny算子的优越性,提出 一种新的Canny边缘检测算法,该算法用 滤波性能较好的双边滤波代替传统Canny 边缘检测中的高斯滤波,对含噪图像具有 更好的边缘检测效果。 双边滤波是一种非线性的2D信号滤 波方法 ,是图像的空间临近度和像素相 似度的一种折衷处理[5],是通过像素的加 权平均而定义的,利用强度的变化来保存 图像边缘信息。设BF为双边滤波的符号, 由下式定义[6]:
1.引言 边缘检测技术是数字图像处理中的 一项重要技术,边缘检测的主要目的就是 实现对目标图像的精确定位。边缘是图像 的基本特征,是图像分割的重要依据,也 是纹理特征的重要信息源和形状特征分析 的基础,边缘检测的效果将直接影响到图 像理解和识别的性能 。经典的边缘检测 算子,如Robert、Prewitt、Log等,简 单、易于实现,但对噪声敏感、抗干扰性 能差,边缘不够精细[2]。相比这些算子, Canny算子具有更好的信噪比和检测精 度,在图像边缘检测领域中具有更加广泛 的应用范围。 但是,实际图像中,存在着许多噪 声,这时,若仍采用传统Canny算子进行 边缘检测,会将一些噪声点误作边缘点检 测,导致提取的边缘轮廓模糊、不精确, 因此,我们需要对传统Canny算子加以改 进。 本文提出了一种基于Canny算子而改 进的边缘检测算法,该算法既可以较好地 滤除噪声,又可以提高目标边缘的定位精 度、抑制虚假边缘和去除冗余弱边缘,呈 现出了一个更为清晰的图像边缘检测结 果,比传统Canny算法具有更好的性能。 2.传统canny边缘检测算法 Canny提出了边缘检测性能优劣的3 个判断准则[3]: 高信噪比准则:即输出信号的信噪 比最大,以降低边缘点判断为非边缘点 和非边缘点判为边缘点的概率。信噪比越 大,误检率越低。 高定位精度准则:好的定位性能, 即检测出的边缘点要尽可能在实际边缘的 中心 单边缘相应准则:即单一边缘只有 惟一响应,并且对虚假边缘响应应得到最 大抑制。 2.1 传统canny算法边缘检测步骤
基于改进Canny_算法的图像边缘检测

第 22卷第 8期2023年 8月Vol.22 No.8Aug.2023软件导刊Software Guide基于改进Canny算法的图像边缘检测窦蕾萍,吴君钦(江西理工大学信息工程学院,江西赣州 341000)摘要:针对传统Canny算法对椒盐噪声敏感,在计算梯度幅值时只考虑了水平与垂直方向、在非极大值抑制过程中仅依据梯度方向的梯度幅值,从而导致梯度计算不准确、滤波后图像边缘模糊等问题,提出一种改进的Canny边缘检测算法。
首先,结合自适应中值滤波与引导滤波的混合滤波器不仅能有效去除图像中的椒盐噪声,还能更好地保存图像边缘;然后,利用4个方向Sobel算子模板计算图像梯度;最后,在非极大值抑制过程中,采用自适应线性插值方法提升边缘检测精度。
仿真实验表明,所提算法不仅能有效滤除椒盐噪声,并且相较于传统Canny算法能检测出更多边缘细节。
关键词:图像边缘检测;Canny算法;混合滤波;4个方向Sobel算子;自适应线性插值DOI:10.11907/rjdk.222062开放科学(资源服务)标识码(OSID):中图分类号:TP391.41 文献标识码:A文章编号:1672-7800(2023)008-0216-05Image Edge Detection Based on Improved Canny AlgorithmDOU Leiping, WU Junqin(School of Information Engineering, Jiangxi University of Technology, Ganzhou 341000,China)Abstract:Aiming at the problem that the traditional Canny algorithm is sensitive to salt-and-pepper noise, only vertical and horizontal direc⁃tions are considered when calculating the gradient amplitude, and only the gradient amplitude in the gradient direction is used in the process of non maximum suppression, which leads to inaccurate gradient calculation and blurred image edges after filtering, an improved Canny edge detection algorithm is proposed. First, the hybrid filter combining adaptive median filter and guided filter can not only effectively remove salt-and-pepper noise in the image, but also better preserve the image edges; Then, use the Sobel operator template in four directions to calculate the image gradient; Finally, in the process of non maximum suppression, the adaptive linear interpolation method is used to improve the edge detection accuracy. Simulation results show that the proposed algorithm can not only effectively filter salt-and-pepper noise, but also detect more edge details than the traditional Canny algorithm.Key Words:image edge detection; Canny algorithm; hybrid filtering; sobel operator in 4 directions; adaptive linear interpolation0 引言目前,边缘检测作为图像处理中极为关键的一部分,已成功应用于航空航天探测、工业监控生产、生物医疗科学等领域[1],大致可分为一阶微分算子(Sobel、Prewitt等)和二阶微分算子(Laplace等)[2-4]。
基于改进型Canny算子的虹膜图像外边缘检测
基于改进型Canny算子的虹膜图像外边缘检测作者:李毅等来源:《科技传播》2014年第16期摘要基于使用传统Canny算子检测虹膜图像后,部分图像抛物线和圆的检测出现细节不完整等问题,提出一种基于自适应动态阈值的算子。
将整幅图像分割为若干个子区域,令子图像之间有一定区域的重叠,然后依据非极大值抑制之后的输出结果自适应地选取每个子图像的高、低两个阈值。
为了验证改进算法的有效性,因而对CASIAI虹膜数据库进行实验并对结果进行分析,得出改进Canny算法相比传统Canny算子不仅计算复杂度有所降低,而且能够更好地检测边缘信息。
关键词边缘检测;Canny算子;自适应动态阈值中图分类号TP391.4 文献标识码A 文章编号 1674-6708(2014)120-0160-03Abstract In this paper, an arithmetic which is based on adaptive dynamic threshold is put forward. It is directed against the traditional Canny operator detection used in the iris image, which has been confronted with incomplete problems in part of its image parabola and round inspection details. This arithmetic segments the whole image into several sub areas in order to make a certain area of overlap between the sub images. After that, the output of the high and low two thresholds of each sub image will be selected adaptively based on the maximum inhibition. This paper is to verify the validity of the improved arithmetic so that it tests the CASIAI iris database and analyzes the results. It makes a conclusion that compared with the traditional Canny operator, the improved Canny algorithm not only has reduced computing complexity, and it is better capable to detect the edge information.Keywords edge detection; Canny arithmetic; adaptive dynamic threshold0 引言身份鉴别是一个永恒的课题。
基于改进Canny算子与图像形态学融合的边缘检测方法

基于改进Canny算子与图像形态学融合的边缘检测方法赵洁;李玮;郝志鹏;彭慧卿【摘要】传统Canny算法采用高斯滤波会造成图像的过度光滑,容易导致缓变边缘的丢失,而且梯度幅值的计算方法没有充分考虑到3x3邻域内周围像素对中心像素的影响.针对上述存在的问题与不足,结合小波融合技术的优势,提出了一种基于改进Canny算子与图像形态学融合的边缘检测方法,利用改进的Canny算子和图像形态学分别对图像进行边缘检测,然后应用小波融合技术把两种方法检测出来的边缘进行图像融合,得到最终的图像边缘.仿真结果表明,该算法具有较好的抗噪能力,有效地提高了边缘检测的准确性和完整性.【期刊名称】《微型机与应用》【年(卷),期】2011(030)010【总页数】4页(P44-47)【关键词】Canny算子;图像形态学;边缘检测;图像融合【作者】赵洁;李玮;郝志鹏;彭慧卿【作者单位】天津城市建设学院电子与信息工程系,天津300384;天津城市建设学院电子与信息工程系,天津300384;天津城市建设学院电子与信息工程系,天津300384;天津城市建设学院电子与信息工程系,天津300384【正文语种】中文【中图分类】TP301.6边缘检测是图像分割、目标区域识别和特征提取等数字图像分析领域中的重要技术,目前已经成为机器视觉研究领域最活跃的热点课题之一。
传统边缘检测方法包括Roberts算子、Sobel算子等一阶微分算子,以及Laplacian算子、LOG算子等二阶微分算子[1]。
这类算法以满足一阶导数极大值点或者二阶导数过零点作为图像的候选边缘点,通过人为设定的全局阈值作为评价标准去除噪声与弱边缘点,将梯度值小于阈值的候选边缘点删除。
由于微分运算对噪声比较敏感,抗噪声性能差,提取的边缘不够精细,因此在实际应用中受到了限制[2]。
对于边缘检测算子性能优劣,Canny提出了三个评价准则[2]:高信噪比准则、定位精准准则和单一边缘唯一响应准则,并据此提出了Canny边缘检测算子。
基于Canny算子的图像边缘检测算法
基于Canny算子的图像边缘检测算法作者:石桂名等来源:《现代电子技术》2015年第12期据图像的某种特定信息,把目标的边缘与周围的区分开来。
回顾了几种传统的边缘检测方法,并分析它们的优缺点,详细阐述了Canny算子的检测原理和实验方法。
实验结果表明Canny算子是最优的边缘检测算子,能够较稳定地对目标图像进行边缘信息提取,得到较好的检测效果。
关键词:图像处理;边缘检测; Canny算子;参数选择中图分类号: TN911.73⁃34 文献标识码: A 文章编号: 1004⁃373X(2015)12⁃0092⁃02边缘检测算法是图像处理中的一个重要部分,本文比较了几种常用的传统边缘检测算法,分析Canny算法的含义、原理和步骤,并将Canny算法应用于车牌和动物的检测。
实验仿真结果验证了Canny算法的良好性能:提取缘信息的同时,能很好地抑制噪声的干扰,提高了图像边缘检测效果,但对于某些细节过于复杂的图像可能丢失一些信息。
1 边缘检测算法简介Roberts算子是一种利用局部差分来寻找边缘的边缘检测算子,它处理的边缘效果不是很好,不够平滑。
Sobel算子是滤波算子,用于提取边缘时,可以利用快速卷积函数,方法简单,使用率较高,但是不能严格地模拟人的视觉生理特征,提取的图像轮廓并不能令人满意[1]。
Prewitt算子是一种基于一阶微分算子的边缘检测,利用像素点周围邻点的灰度差,在边缘处达到极值检测边缘,除掉一些假边缘,起到了平滑噪声的功能。
Laplacian算子是一个二阶微分算子,定义为梯度([∇f])的散度([∇⋅f])。
LoG算子也就是高斯拉普拉斯函数,常常用于数字图像的边缘提取和二值化,它结合了Gauss平滑滤波器和Laplacian锐化滤波器,效果更好。
Canny算子是一个多级边缘检测算法,边缘检测效果最好[2⁃3]。
2 Canny边缘检测算子2.1 Canny算法的含义1986年,John F.Canny找到一个可以实现多级边缘检测的算法,命名为Canny边缘检测算子,其含义如下[4]:(1)最佳检测:能够检测到足够多的图像中实际的边缘,减少真实边缘的漏检率和误检率。
基于Canny算子改进的边缘检测算法

法 在边 缘 捡 测 和连 接 过程 『f]『]动 获取 高 低 闽 仇 、 文献 【8】针对 点 的像 素点 称 为端 点 。例如 ,冈 2中 。点 A的 8邻 域 内只 有 一·
Canny边 缘检 测 算 法 巾需 要依靠 人 工设 定 闯 倩 而 现 艇边 缘 或 个边 缘点 ,所 以点 A足端 , 点 B的 8邻域 内存两 个 榴邻 的边
l4~ 科 学技 术创 新 2()18.27
图 4 边 缘连 接 窗 口图
由于每 个边 缘均 有 两个 可能 的方 向 ,本 文根 据端 点 8邻域
内边 缘 点 的位 置判定 边缘 连接 方 向 。定 义与端 点 8邻 域 内边缘 点位 置 相反 的方 向 为边缘 连接 方 向 。边 缘连 接 窗 口选 择情 况 如
该 算 法的 边缘 连接 性较 强 ,不仅 保 留 了传 统 Canny算 法的 优越性 ,而且 检测 结 果 更加 完整 、全 面地 保 留 了图像 的细 节信息 、
关键 词 :边缘检 测 ;Canny算 子 ;霍 夫 变换
中 图 分 类 号 :TP391.41
文 献 标 识 码 :A
文 章 编 号 :2096—4390(2018)27—0013-02
2018.27科 学技 术创新 一13一
基 于 Canny算子 改进 的边 缘检 测 算 法
王保军 赵 海清 ’ 刘 超 (1、国 网黑龙 江省 电力 有限公 司佳 禾斯供 电公 司,黑 龙江 佳 木斯 154(1{lI) !、东北 电力大 学计算 机 学院 ,吉林 吉林 132{112)
虚假 边 缘 的 缺 点 ,捉 i¨ 种基 】 边 缘 }}{似悱 下¨方 向 的连 接 r 缘 点 ,所 以点 B也是端}点 、
基于canny算子的边缘检测算法应用研究
基于canny算子的边缘检测算法应用研究作者:陈蒙来源:《电子技术与软件工程》2013年第23期摘要:边缘检测技术是图像处理过程的重要一环,本文主要研究基于canny算则的边缘检测算法中的抑制噪声、寻找亮度梯度、非极大值抑制、边缘的确定和连接等四个过程,并逐个分析其实现过程及作用。
【关键词】边缘检测高斯平滑1 引言随着图像处理技术的发展与广泛应用,现在社会中图像处理的应用领域越来越广泛,如三维重建,医学诊断,图像识别等等。
而图像处理过程中,最重要的一项预处理技术即为边缘检测技术。
图像的边缘是图像特征识别中的重要组成部分。
我们一般认为边缘是图像中周围像素有不连续变化或屋脊变化的像素的集合。
在一幅图像中,边缘特征所表达的信息量在整张图片的特征信息中占有主导地位,对图像特征的识别、分析十分重要。
边缘信息主要从像素值幅度和走向两个方面来表示。
一般来说,沿着边缘走向的像素点灰度值呈连续性变化特征,而垂直于边缘走向的像素点灰度值则呈跳跃性或阶跃性变化特征。
边缘检测技术即为通过一定的算法将图像中的边缘尽可能真实地提取或表示出来的技术。
边缘检测技术发展到目前已有很多类提取算法,但主要的计算原则就借助于类似高斯平滑、傅里叶变换等的数学函数与图像的灰度矩阵进行卷积计算,从而得到横、纵两个方向上的梯度图像和模图像,然后根据梯度方向来进行模的极大值提取,获得需要的图像特征边缘。
本文主要研究的是以canny算子为检测手段的边缘检测算法。
2 canny边缘检测算法任何一个边缘检测算法的原则都是真实、详尽地标识出原图像的实际边缘,同时又尽可能避免图像中的噪点、伪边缘等噪声的干扰,找到一个最优的图像边缘。
Canny边缘检测算法也是如此,一般由抑制噪声、寻找梯度亮度、非极大值抑制、确定和连接边缘这四步完成的。
2.1 1抑制噪声任何图像在进行边缘检测之前,都要进行抑制噪声的预处理。
它是所有图像处理过程的第一步。
图像的噪声主要有椒盐噪声和高斯噪声两种,而绝大部分图形的干扰噪声属于高斯噪声,因此canny算法的第一步采用的是运用二维高斯平滑模板与原图像数据进行卷积计算,而得到抑制噪声后的待处理图像。
基于改进Canny算法的物体边缘检测算法
基于改进Canny算法的物体边缘检测算法物体边缘检测是计算机视觉中的一项重要任务,它在图像分析、物体识别和图像处理等领域具有广泛的应用。
Canny算法作为一种经典的边缘检测算法,被广泛应用于实际工作中。
然而,传统的Canny算法在处理一些复杂场景的边缘检测时存在一些问题,如边缘连接不准确、噪声敏感性较高等。
本文将介绍一种基于改进Canny算法的物体边缘检测算法,以解决传统Canny算法存在的问题。
1. 算法背景物体边缘检测是获取图像中物体边缘位置的过程,它对于图像中物体的形状和轮廓分析起着关键作用。
传统的Canny算法主要包括以下几个步骤:高斯平滑、计算梯度幅值和方向、非极大值抑制、双阈值处理和边缘连接。
然而,传统Canny算法对噪声比较敏感,而且在边缘连接过程中常常会出现断裂或连接错误的情况。
2. 改进的Canny算法为了改善传统Canny算法的缺点,我们提出了一种改进的Canny算法,具体步骤如下:2.1 高斯平滑首先对输入图像进行高斯平滑操作,以降低图像中的噪声。
我们采用一个合适大小的高斯卷积核对图像进行卷积操作,得到平滑后的图像。
2.2 计算梯度幅值和方向在平滑后的图像中,我们计算每个像素点的梯度幅值和方向。
可以使用Sobel、Prewitt等算子对图像进行梯度计算,得到梯度幅值和方向图像。
2.3 非极大值抑制在梯度幅值和方向图像中,我们进行非极大值抑制操作,以找到边缘的细化位置。
对于每个像素点,我们判断其梯度方向,并与相邻的两个像素进行比较,如果当前像素的梯度幅值最大,则保留,否则置零。
2.4 双阈值处理在进行非极大值抑制后,我们进行双阈值处理,以将真正的边缘从噪声中区分出来。
设置一个较高的阈值和一个较低的阈值,对梯度幅值进行判断,如果大于高阈值,则被认为是强边缘;如果处于低阈值和高阈值之间,则被认为是弱边缘;如果小于低阈值,则被认为是噪声。
2.5 边缘连接在双阈值处理后,我们进行边缘连接操作,以连接断裂的边缘线段。