空间柔性机械臂弯扭耦合振动的主动控制研究
柔性机械臂的控制技术研究

柔性机械臂的控制技术研究随着科技的发展,机械臂在工业、医疗、探险等领域得到了广泛应用。
然而,在某些特定场景下,刚性机械臂无法满足工作需要。
这时,柔性机械臂便成为了不可或缺的工具。
柔性机械臂具有纤细、精度高、便携等特性,适用于狭小空间、弯曲路径的作业等。
而柔性机械臂的控制技术则是保证其高效工作的基础。
一、柔性机械臂的特点与刚性机械臂相比,柔性机械臂不同在于其结构。
柔性机械臂采用可变形、可伸缩、可弯曲的柔性杆件,具有更广阔的应用范围。
柔性机械臂一般由伸缩机构、跟踪控制器、执行器等组成。
算上机械臂末端的工具,这些组件都是可柔性调整的。
二、柔性机械臂的控制技术研究柔性机械臂的控制技术包括硬件系统、控制程序和力传感器等方面。
控制程序的设计主要包括运动规划、轨迹跟踪、控制算法等。
柔性机械臂的受力学特性复杂,不同于刚性机械臂,其面临自身重力、非线性摩擦等问题。
传统控制方法上的误差会导致机械臂位置、力矩等不稳定。
因此,柔性机械臂的控制技术是具有挑战性的领域。
针对柔性机械臂的非线性和多变性特征,研究者采用基于人工神经网络的控制方法。
这种方法的优势在于,机器具有自我学习的特性,且在实际应用中具有较高的鲁棒性。
而且,增量式学习可以让机器在实际工作中不断优化自我控制程序,不断提高工作效率。
同时,研究者还关注力传感器技术的应用。
力传感器会将机械臂末端施加的力矩进行测量,从而实现对机械臂末端的力控制。
采用力控制的柔性机械臂可克服自身多变性,能够实现精确的工作操作。
三、柔性机械臂应用基于现有技术,柔性机械臂可应用于各种领域。
在食品加工装配等工业领域,柔性机械臂能够实现复杂、繁琐的操作。
其在装上机器人、捡取食品等一系列操作时,能够提高生产效率,减少产品被损坏的可能性。
在探险、勘察等非工业领域,柔性机械臂由于其细小形状、可弯曲的手臂,在某些狭小的空间中能够实现测量以及捕捉目标等功能。
四、未来展望随着技术的持续发展,柔性机械臂的控制技术将不断提高。
基于PPF算法的柔性机械臂振动主动控制仿真研究
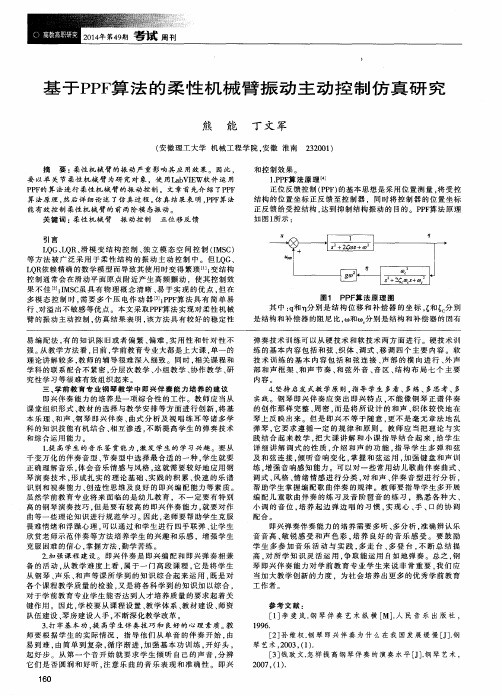
算法原理, 然 后 详 细 论 述 了仿 真过 程 。 仿真结果表明 臂 的 前 两 阶 模 态振 动 。
关键词 : 柔 性 机械 臂 振 动 控 制 正 位 移 反 馈
引 言
L Q G、 L Q R、 滑模 变结构 控制 、 独立 模态空 间控制 ( I MS C) 等 方 法 被 广 泛 采 用 于 柔 性 结 构 的振 动 主 动 控 制 中 。 但 L Q G、 L Q R 依 赖 精 确 的 数 学模 型而 导 致 其 使 用 时 变 得 繁 琐 [ 1 3 ; 变 结 构 控 制 通 常 会 在 滑 动 平 面 原 点 附 近 产 生 高 频 颤 动 .使 其 控 制 效
的创作那样完 整 、 周密 , 而是将所 设计 的和声 、 织 体 较 快 地 在
琴 上 反 映 出来 。但 是 即 兴 不 等 于 随 意 , 更 不 是 毫 无 章 法 地 乱 弹琴 , 它 要 求 遵 循 一 定 的 规 律 和 原 则 。 教 师 应 当 把 理 论 与 实 践结合起 来教 学 , 把 大课讲 解和小 课指 导结合 起来 。 给 学 生 详细讲解 调式 的性质 , 介 绍和声 的功 能 。 指 导 学 生 多 弹 和 弦
识别和视奏能力、 创 造 性 思 维 及 良好 的 即兴 编 配 能 力 等 素 质 。 虽 然 学 前 教 育 专业 将 来 面 临 的是 幼儿 教 育 。不 一 定 要 有 特 别 高 的 钢 琴 演奏 技 巧 . 但是要有较高的即兴伴奏能力 , 就要 对 作 曲 等 一些 理论 知识 进 行 规 范 学 习 。因此 , 老 师 要 帮 助 学 生 克 服 畏 难情 绪 和浮 躁心 理 . 可 以通 过 和 学 生 进 行 四手 联 弹 、 让 学 生 欣 赏 老 师 示 范伴 奏 等方 法 培 养学 生 的 兴趣 和 乐 感 ,增 强 学 生 克 服 困难 的信 心 。 掌 握方 法 . 勤学苦练。 2 . 加 强课 程 建 设 。 即 兴 伴 奏 是 即 兴 编 配 和 即兴 弹奏 相 兼 备的活动 . 从教学难度上看 , 属 于 一 门高 段 课 程 , 它 是 将 学 生 从钢琴 、 声乐 、 和声等课所学 到的知识综合起 来运用 , 既 是 对 各 个 课程 教学 质 量 的检 验 , 又 是 将 各 科 学 到 的 知 识 加 以综 合 , 对 于 学前 教育 专 业 学 生 能否 达 到 人 才 培养 质 量 的要 求 起 着 关
柔性机器人的自主机械臂运动控制研究
柔性机器人的自主机械臂运动控制研究柔性机器人,作为一种崭新的机器人技术,越来越受到人们的关注和重视。
与传统刚性机器人相比,柔性机器人具有更大的自由度、更高的灵活性和更好的适应性。
然而,柔性机器人的自主机械臂运动控制一直是一个具有挑战性的问题。
本文将对柔性机器人的自主机械臂运动控制进行研究和探讨。
一、柔性机器人的特点与挑战柔性机器人与刚性机器人最大的区别在于其柔软的结构。
柔性材料的运用使得机器臂可以实现更复杂的运动,并且能够适应不同的工作环境和任务。
然而,柔性机器人的自主机械臂运动控制面临着一些挑战。
首先,柔性机器人的运动受到非线性和时变特性的影响,使得控制算法的设计复杂化。
其次,柔性材料本身具有一定的延展性和刚度变化,对控制算法的精度和稳定性提出了更高的要求。
因此,如何有效地实现柔性机器人的自主机械臂运动控制成为了一个亟待解决的问题。
二、柔性机器人自主机械臂运动控制的方法针对柔性机器人的自主机械臂运动控制问题,目前学术界和工业界都提出了一些解决方法。
下面将介绍几种常见的方法。
1. 建模与控制建模是柔性机器人运动控制的关键一步。
通过对柔性机器人进行动力学建模和力学建模,可以得到机器人的运动学和动力学特性,为后续的控制算法设计提供基础。
现有的柔性机器人建模方法包括有限元法、模态分析法等。
2. 轨迹规划与优化柔性机器人的轨迹规划与优化主要解决如何使机器人的末端执行器按照既定的轨迹完成任务。
常用的轨迹规划方法有基于模型预测控制的方法、基于优化算法的方法等。
这些方法可以通过对机器人动力学特性和约束条件的考虑,实现更加准确和高效的轨迹规划。
3. 自适应控制自适应控制是指机器人根据外界环境和输入变化自主调整控制策略的能力。
对于柔性机器人的自主机械臂运动控制来说,自适应控制可以提高机器人在不同工作环境下的适应性和鲁棒性。
常见的自适应控制方法包括模型参考自适应控制、模糊自适应控制等。
三、柔性机器人自主机械臂运动控制的应用前景柔性机器人的自主机械臂运动控制不仅对于工业制造领域有着广泛的应用前景,还在医疗、服务机器人等领域有着巨大的潜力。
组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告

组合柔性机械臂动力学特性与振动抑制性能的研究的开题报告一、研究背景柔性机械臂具有结构灵活、可冗余、质量轻等优点,在机器人领域中具有广泛应用前景。
然而,在实际应用过程中,柔性机械臂所带来的振动问题给控制系统带来了很大的挑战。
因此,研究柔性机械臂的动力学特性和振动抑制性能,对其优化设计和精确控制具有重要意义。
二、研究目的本文旨在:1. 深入探究柔性机械臂的动力学特性,分析和建立柔性机械臂的动力学模型。
2. 研究柔性机械臂的振动抑制性能,探究影响柔性机械臂振动的因素及其对振动抑制的影响。
3. 组合动力学与振动抑制分析,提出有效的柔性机械臂振动抑制方法并进行实验验证。
三、研究内容本文将围绕柔性机械臂的动力学特性和振动抑制性能展开研究工作,具体包括以下内容:1. 对柔性机械臂的动力学特性进行深入分析,在建立动力学模型的基础上模拟分析柔性机械臂的运动学和动力学特性。
2. 探究柔性机械臂振动的原因,包括结构刚度、质量分布等对柔性机械臂振动的影响,并对振动抑制技术进行综述。
3. 基于系统鲁棒控制的方法,提出柔性机械臂的振动抑制控制方法。
设计集中式控制器并验证其有效性。
4. 通过实验验证柔性机械臂的动力学特性和振动抑制性能,并与其他已有的方法进行比较,以评估所提出的方法的有效性和实用性。
四、研究意义本文研究的柔性机械臂动力学特性和振动抑制性能对提升柔性机械臂的精度和控制能力具有重要意义,具体有以下几点:1. 深入研究和掌握柔性机械臂的动力学特性和振动抑制技术,有助于优化柔性机械臂设计,提高其控制精度。
2. 所提出的柔性机械臂振动抑制控制方法,为柔性机械臂的实际应用提供了一种新的控制途径,具有重要的理论和实用价值。
3. 相关研究成果可以为机器人领域中的其他柔性结构的动力学分析和振动抑制技术提供有益借鉴和参考。
五、研究方法和技术路线本研究主要采用理论分析和实验验证相结合的方法,具体技术路线如下:1. 对柔性机械臂的动力学特性和振动抑制技术进行综述和分析,总结相关理论和方法。
柔性关节机械臂振动抑制控制策略的研究
硕士学位论文柔性关节机械臂振动抑制控制策略的研究(学术型)RESEARCH ON THE CONTROL STRATEGY OF VIBRATION SUPPRESION FOR THEFLEXIBLE-JOINT MANIPULATOR(Academic)任义哈尔滨工业大学2013年7月国内图书分类号:TP241.3 学校代码:10213 国际图书分类号:621 密级:公开工学硕士学位论文柔性关节机械臂振动抑制控制策略的研究(学术型)硕士研究生:任义导师:金明河教授申请学位:工学硕士学科:机械电子工程所在单位:机电工程学院答辩日期:2013年7月授予学位单位:哈尔滨工业大学Classified Index: TP241.3U.D.C: 621Dissertation for the Master Degree in EngineeringRESEARCH ON THE CONTROL STRATEGY OF VIBRATION SUPPRESION FOR THEFLEXIBLE-JOINT MANIPULATOR(Academic)Candidate:Ren YiSupervisor:Prof.Jin MingheAcademic Degree Applied for:Master of Engineering Speciality:Mechatronics Engineering Affiliation:School of Mechatronics Engineering Date of Defence:July, 2013Degree-Conferring-Institution:Harbin Institute of Technology哈尔滨工业大学工学硕士学位论摘要谐波减速器和力矩传感器等柔性元件因其独特性能而广泛应用在机器人关节系统中,以获取高减速比,对关节力矩的检测和实现关节的模块化。
刚—柔耦合问题与空间多杆柔性机械臂的动力学建模理论研究
刚—柔耦合问题与空间多杆柔性机械臂的动力学建模理论研究一、本文概述随着现代机器人技术的发展,空间多杆柔性机械臂在航天、深海探索、精密制造等领域的应用日益广泛。
这类机械臂在运动中不仅呈现出刚体动力学特性,而且由于结构柔性,其动力学行为还受到弹性变形的影响。
对刚—柔耦合问题的深入研究,以及建立准确的空间多杆柔性机械臂动力学模型,对于提高机械臂的运动精度、稳定性和控制效率具有重要意义。
本文旨在探讨空间多杆柔性机械臂的动力学建模理论。
我们将回顾和梳理刚—柔耦合问题的基本概念和研究现状,分析现有动力学模型的优缺点及适用范围。
接着,我们将基于弹性力学、多体动力学和计算机仿真技术,建立一种综合考虑刚体运动和弹性变形的动力学模型。
该模型将能够更准确地描述机械臂在运动过程中的动力学行为,为后续的轨迹规划、控制和优化提供理论基础。
本文还将对所建立的动力学模型进行实验验证。
通过对比仿真结果与实验结果,评估模型的准确性和可靠性,并提出改进和优化建议。
我们期望通过本文的研究,能够为空间多杆柔性机械臂的动力学建模提供新的理论和方法,推动相关领域的技术发展和应用创新。
二、刚-柔耦合问题的基础理论刚-柔耦合问题涉及机械系统中刚性部分与柔性部分之间的相互作用和动力学特性。
在解决这类问题时,我们需要结合刚体动力学和弹性力学的基本理论,对系统的整体运动进行建模和分析。
刚体动力学是研究刚体在力和力矩作用下的运动规律的学科。
根据牛顿第二定律,刚体的运动可以通过建立运动方程来描述,其中包含了刚体的质量、惯性矩以及所受的力和力矩。
这些方程可以通过数值方法求解,得到刚体的位移、速度和加速度等运动参数。
弹性力学则关注物体在受到外力作用时发生的形变和应力分布。
对于柔性机械臂,其弹性形变会对整体运动产生影响,因此需要考虑其弹性特性。
在弹性力学中,物体的形变可以通过位移场来描述,而位移场满足弹性力学的基本方程,如平衡方程、几何方程和本构方程。
在刚-柔耦合问题中,我们需要将刚体动力学和弹性力学的基本理论相结合,建立系统的整体动力学模型。
柔性机械臂的建模与控制策略研究
柔性机械臂的建模与控制策略研究柔性机械臂是近年来工业领域研究的热点之一,具有广泛的应用前景。
本文就柔性机械臂的建模和控制策略进行研究,探讨其在工业自动化、医疗护理、航空航天等领域的应用和发展。
1. 引言柔性机械臂是模仿人类手臂的运动方式和结构特点,具有高柔顺性、高位移范围和高精准度的特点。
其模块化、可重构的特性为机器人技术的发展带来新的机遇和挑战。
2. 柔性机械臂的建模柔性机械臂的建模是实现精确运动和控制的重要基础。
对于柔性机械臂的建模,可以采用传统的拉格朗日动力学方法,也可以利用有限元法进行建模。
拉格朗日动力学方法适用于解析建模和控制策略研究,而有限元法则更适用于复杂结构的柔性机械臂,可以更准确地预测系统的特性和行为。
3. 柔性机械臂的控制策略柔性机械臂的控制策略是确保其运动精度和稳定性的关键。
常用的控制策略包括PID控制器、模糊控制器和自适应控制器等。
在柔性机械臂的控制过程中,应结合建模结果和实际应用需求,选择合适的控制策略,并对其参数进行调节和优化,以提高控制性能和系统响应速度。
4. 柔性机械臂在工业自动化中的应用柔性机械臂在工业自动化中广泛应用于装配、搬运、焊接等任务。
与传统机械臂相比,柔性机械臂在操作环境适应性、安全性和精度上有显著优势。
它不仅可以适应复杂工作环境,还可以进行细小、灵活和精密的动作。
5. 柔性机械臂在医疗护理中的应用柔性机械臂在医疗护理中的应用正在引起越来越多的关注。
它可以完成手术、康复和病房护理等任务,为医生和护士提供更好的帮助和支持。
柔性机械臂的高柔顺性和灵活性使得它能够更好地适应患者的生理特点和需求,提高医疗护理的效率和质量。
6. 柔性机械臂在航空航天中的应用柔性机械臂在航空航天领域的应用也具有广阔的前景。
它可以用于航天器的维修、轨道器的捕获和星座组网等任务。
柔性机械臂的高位移范围和高精度使得它能够适应复杂的航天环境,并完成一系列复杂任务。
7. 研究展望柔性机械臂的建模与控制策略研究仍然存在一些挑战和待解决的问题。
一种柔性机械臂旋转运动和振动的主动控制方法
4月 第4 期
机械科学与技术 Mechanical Science and Technology for Aerospace Engineering
April Vol. 31
2012 No. 4
一种柔性机械臂旋转运动和振动 的主动控制方法
1 1 韩清鹏 , 于晓光 , 唐 (
2
School of Mechanical Engineering and Automation,Northeastern University,Shenyang 110004 )
Abstract: The PZT material was selected in this paper to control the vibration of flexible manipulator. The inverse piezoelectric effects of the PZT material and the principle of suppressing vibration were introduced. PZT actuators and joint control torque were respectively used to control vibration and rotary motion of flexible manipulator. The flexible manipulator was controlled to achieve the desired position in limited time by joint control torque and manipulator's vibration was actively controlled by PZT actuators during motion. The dynamic equations of flexible manipulator system were established. PZT actuators control strategy and joint control torque were designed. The numerical simulation results proved the method of the designed PZT actuator control strategy and joint control torque was effective. Key words: flexible manipulator; joint torque control; PZT actuators; vibration control 柔性机械臂具有操作速度快、 能量消耗少、 构件 紧凑、 载荷质量比大等优点, 在现代工业中得到广泛 的应用。但是, 由于其高速运动时刚体运动与和弹 性变形相互耦合, 容易产生高频振动, 且其末端运动 往往偏离较大, 直接影响系统的稳定与控制精度 。 例如, 加工机械臂在高速运行时, 其定位精度会受到
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
龙源期刊网
空间柔性机械臂弯扭耦合振动的主动控制研究
作者:娄军强魏燕定杨依领谢锋然
来源:《振动工程学报》2014年第03期
随着航天事业的飞速发展,融合航空航天技术和机器人技术的空间机械臂系统得到了广泛的应用[1]。
由于太空环境的特殊性和空间操作任务的复杂性,人们对空间机械臂结构的要求
越来越高,空间机械臂朝着多自由度、低刚度、柔性化和大型化的趋势发展,这使得空间机械臂的动力学响应表现为大范围的刚性运动和自身柔性振动相叠加的刚柔耦合特征。
在太空环境中的内外部因素激励下,具有低频模态密集、固态阻尼小特征的柔性机械臂势必会产生低频、大幅值的持续振动,从而影响整个系统的位置精度和控制精度。
因而对空间柔性机械臂的定位控制和振动控制的研究是目前空间技术领域中最重要的课题之一[2]。