课程设计—热镦挤送料机械手
热镦挤送料机械手
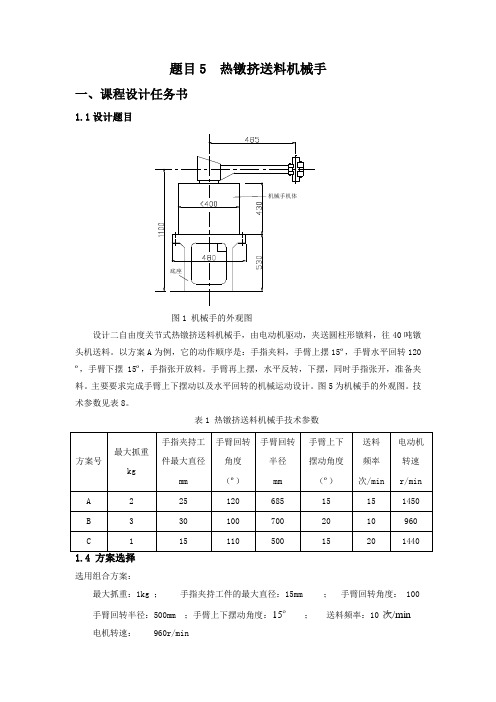
题目5 热镦挤送料机械手一、课程设计任务书1.1设计题目机械手机体底座图1 机械手的外观图设计二自由度关节式热镦挤送料机械手,由电动机驱动,夹送圆柱形镦料,往40吨镦头机送料。
以方案A 为例,它的动作顺序是:手指夹料,手臂上摆15º,手臂水平回转120º,手臂下摆15º,手指张开放料。
手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
主要要求完成手臂上下摆动以及水平回转的机械运动设计。
图5为机械手的外观图。
技术参数见表8。
表1 热镦挤送料机械手技术参数方案号最大抓重kg手指夹持工件最大直径mm手臂回转角度(º) 手臂回转半径mm 手臂上下摆动角度(º) 送料频率次/min 电动机转速r/min A 2 25 120 685 15 15 1450 B 3 30 100 700 20 10 960 C115110500152014401.4 方案选择选用组合方案:最大抓重:1kg ; 手指夹持工件的最大直径:15mm ; 手臂回转角度: 100 手臂回转半径:500mm ;手臂上下摆动角度:15 ; 送料频率:10/min 次 电机转速: 960r/min二、机构功能分解此机构由原动机、传动部分、执行部分组成,其功能关系如表2所示。
表2机构功能分解机械手原动机 传动部分 执行机构电动机齿轮传动间歇上下摆动机构间歇水平摆动机构三、机构运动方案设计与评价3.1 手臂上下摆动机构的设计与选择机械手臂上下摆动运动为间歇性运动,能实现此功能的机构有很多,如:凸轮、凸轮+齿轮、 不完全齿轮+铰链四杆机构,具体方案如下:方案1: 方案2:图3.1 不完全齿轮+曲柄摇杆 图3.2 盘形凸轮+摇杆机构 方案3:图3.3 圆柱凸轮+连杆机构这3个方案结构都比较简单,方案2使用盘形凸轮机构直接驱动从动件的上下运动,进而通过低复使手臂摇动。
这个方案在计算过程中比较容易,即s=θtan l ⨯,式中s 为从动件行程,l 为手臂转动铰链到凸轮从动件间间距。
机械原理课程设计热墩机械手
机械原理课程设计热墩机械手机械原理课程设计说明书——热镦挤送料机械手B指导老师:温亚莲设计者:李霞学号:20109046班级:机电3班目录第一章设计题目及要求 (1)1.1 设计题目简介 (1)1.2 设计数据及要求 (2)1.3 设计任务与提示 (2)第二章热镦挤送料机械手摆臂的设计 (5)2.1 机械手上下摆臂设计方案A (5)2.2 机械手上下摆臂设计方案B (6)2.3 机械手上下摆臂设计方案C (6)2.4 摆臂方案的确定 (7)第三章热镦挤送料机械手回转装置设计 (8)3.1 回转装置设计方案A (8)3.2 回转装置设计方案B (8)3.3 回转装置设计方案C (9)3.4 驱动装置的选择 (10)3.4.1 常用电动机的结构特征 (10)3.4.2 选定电动机的容量 (10)3.5 回转装置方案的确定 (11)3.6 循环图的拟定及运动路线图 (11)第四章热镦挤送料机械手方案的确定与计算 (13)4.1 拟订的方案 (13)4.2 最终方案的确定与说明 (15)4.3 方案的计算 (16)第五章相关建模过程及仿真 (19)第六章设计总结 (22)第七章参考文献 (22)第一章设计题目及要求1.1 设计题目简介设计二自由度关节式热镦挤送料机械手,由电动机驱动,夹送圆柱形镦料,往40吨镦头机送料。
以方案A为例,它的动作顺序是:手指夹料,手臂上摆15º,手臂水平回转120º,手臂下摆15º,手指张开放料。
手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
主要要求完成手臂上下摆动以及水平回转的机械运动设计。
图1为机械手的外观图。
图1:机械手的外观图1.2 设计数据及要求表11.3 设计任务与提示设计任务1.至少提出可行的两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计;2. 设计传动系统并确定其传动比分配。
3. 图纸上画出步进送料机的机构运动方案简图和运动循环图。
机械原理课程设计-----热镦挤送料机械手的设计综述

机械原理课程设计设计说明书设计题目:热镦挤送料机械手的设计起止日期:2008 年 6 月18日至2008 年6月23日学生姓名班级机设0xx班学号064051xxxxx成绩指导教师(签字)机械工程学院(部)年月目录设计任务书 (3)1.工作原理和工艺动作分解 (5)2.工艺动作和协调要求拟定运动循环图 (6)3.执行机构选型 (6)4.方案评价 (7)5.动系统的速比和变速机构 (9)6.机构运动简图 (9)7.机构组合 (12)8.各个构件的动作顺序 (12)9.凸轮设计 (13)9.参考资料 (22)10.设计总结 (22)课程设计任务书2007 —2008 学年第2 学期机械工程学院学院(系、部)机械设计专业机设062 班级课程名称:机械原理课程设计设计题目:热镦挤送料机械手的设计完成期限:自2008 年 6 月18至 6 月23日共 1 周指导教师(签字):年月日系(教研室)主任(签字):年月日1.工作原理和工艺动作分解(1)夹料机构:靠平面连杆机构做间歇的直线往复运动。
运动循环图如下:(2)送料机构:送料机构由2种动作的组合,一是间歇的回转运动,二是做上下摆动。
运动循环图如下:(3)夹料机构:通过凸轮对手臂上平面连杆机构的控制来调整手指间的间隙从而达到对物料的夹紧和松开。
运动循环图如下:(4)送料机构:当料被抓紧后,通过凸轮对连杆一端的位置的改变进行对杆的摆角进行调整,从而实现对物料的拿起和放下的动作。
手臂的回转通过回转机构进行实现。
(5)转动送料机构:通过来回的回转110度,这到运动的目的,同时又要注意满足机构动作的相互配合。
此机构运动循环图如下:2.根据工艺动作和协调要求拟定运动循环图拟定运动循环图的目的是确定各机构执行构件动作的先后顺序、相位,以利于设计、装配和调试。
其整体运动循环图如下:3.执行机构选型2.表3.2 机构选用表功能执行构件工艺动作执行机构设计矩阵夹料机构手指直线往复运动凸轮机构A1摆动机构手臂上下摆动凸轮机构A2回转机构手臂回转齿轮机构A3夹料机构与摆动机构:根据动作要求,由表2.1设计实例库A3、A1={a31,a41,a42,a11,a51},由于机构要具有停歇功能,且要进行运动变换,故选择直动从动件盘形凸轮。
送料机械手的设计
送料机械手的设计摘要本课题是为普通车床配套设计的上料机械手。
工业机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
本课题对机械手进行了结构设计和液压传动原理的设计,确定了机械手的机械系统,液压驱动系统,控制系统三个组成部分的设计方案。
介绍了机械手的组成和分类,确定了机械手的主要参数及设计方案;对抓取机构的各零部件的参数进行计算,对液压元件进行选择,确定电机规格及机构的参数;对机身机座的电动机和减速器进行选择,并对螺栓设计和校核,确定其当量应力,剪切强度,弯曲强度;确定了机械手的定位方式为机械挡块定位;对影响机械手定位和稳定性的因素进行了相关分析。
关键词:机械手;抓取机构;液压缸目录摘要 (I)第1章绪论 (1)1.1 课题背景 (1)1.1.1 机器人的历史、现状 (1)1.2 机器人发展趋势 (3)1.3 本文的主要研究内容 (3)第2章方案设计及主要参数的确定 (5)2.1 机械手组成和分类 (5)2.1.1 机械手的组成 (5)2.1.2 机械手分类 (6)2.2 方案设计 (6)2.2.1 主要参数的确定 (6)2.2.2 方案设计 (6)2.3 料槽形式及分析动作要求 (7)2.3.1 料槽形式 (7)2.3.2 动作要求分析 (8)2.4 本章小结 (8)第3章抓取机构的设计 (9)3.1 手部设计计算 (9)3.1.1 对手部设计的要求 (9)3.1.2 拉紧装置原理 (10)3.2 腕部设计计算 (13)3.2.1 计算扭矩 (13)3.2.2 油缸(伸缩)及其配件的估算扭矩 (13)3.2.3 腕部回转液压缸尺寸的确定 (13)3.3 臂伸缩机构设计 (16)3.3.1 计算液压缸活塞驱动力 (16)3.3.2 根据驱动力确定液压缸结构尺寸 (17)3.3.3 腔流量 (17)3.3.4 手臂右腔工作压力 (17)3.4 液压元件的选择 (18)3.4.1 绘制机构工作参数表 (18)3.4.2 由初步计算选液压泵 (18)3.4.3 算腕部摆动缸 (18)3.4.4 确定电机规格 (19)3.4.5 油管尺寸的确定 (19)3.4.6 管道壁厚的计算 (20)3.4.7 油缸容积的确定 (20)3.5 本章小结 (20)第4章液压系统原理设计及草图 (21)4.1 手部抓取缸 (21)4.2 腕部摆动液压回路 (21)4.3 小臂伸缩缸液压回路 (22)4.4 总体系统图 (23)4.4.1 工作过程 (23)4.4.2 电磁铁动作顺序表 (23)4.5 本章小结 (24)第5章机身机座的结构设计 (25)5.1 电机的选择 (25)5.1.1 带动臂部升降的电机 (25)5.1.2 带动机身回转的电机 (25)5.2 减速器的选择 (26)5.3 螺柱的设计与校核 (26)5.4 本章小结 (27)第6章机械手的定位与平稳 (28)6.1 常用的定位方式 (28)6.2 影响平稳性和定位精度的因素 (28)6.3 机械手的控制 (29)6.4 本章小结 (30)结论 (31)参考文献 (32)致谢 (33)第1章绪论1.1课题背景1.1.1机器人的历史、现状机器人首先是从美国开始研制的。
热镦挤送料机械手课程设计

热镦挤送料机械手课程设计热镦挤送料机械手是一种用于热镦挤压生产线上的自动化设备,它具有高效、精准的特点。
本文将探讨热镦挤送料机械手的课程设计。
热镦挤压是一种金属加工方法,通过在高温下将金属材料挤压成特定形状。
在热镦挤压生产线上,热镦挤送料机械手起到了关键的作用。
它能够将金属材料从储料架上取下,并准确地送入热镦挤压机中进行加工。
因此,热镦挤送料机械手的设计至关重要。
我们需要确定热镦挤送料机械手的基本参数。
根据生产线的要求,我们需要考虑机械手的负载能力、工作范围、速度等。
负载能力应能够满足挤压机的要求,工作范围应能够覆盖整个挤压机工作区域,速度应能够保证生产效率。
在确定这些参数后,我们可以开始进行机械手的设计。
我们需要选择合适的机械结构。
热镦挤送料机械手通常采用多自由度机械结构,以实现复杂的运动轨迹。
对于挤压机上下料的过程,我们可以采用多关节机械手,它能够实现多方向运动,并能够精确控制位置和姿态。
此外,我们还可以考虑使用气动或电动执行机构,以实现更精准的控制。
然后,我们需要设计机械手的控制系统。
控制系统应能够准确地控制机械手的运动,并保证其稳定性和安全性。
在设计控制系统时,我们可以采用传统的PID控制算法,也可以使用现代的自适应控制算法。
此外,我们还需要考虑机械手与挤压机之间的协作,以确保二者之间的同步运动。
我们需要考虑机械手的安全性和可靠性。
挤压生产线通常是高温、高速、高载荷的工作环境,因此机械手需要具备耐高温、耐磨损、抗震动等特性。
此外,我们还需要设计相应的安全保护装置,以防止意外事故的发生。
热镦挤送料机械手的课程设计需要考虑机械手的基本参数、机械结构、控制系统以及安全性和可靠性等方面。
在设计过程中,我们需要充分考虑生产线的要求,并结合现代控制技术和工程材料的特性,以实现高效、精准的热镦挤压生产。
通过合理的设计和优化,热镦挤送料机械手将成为热镦挤压生产线上不可或缺的重要设备。
热镦挤送料机械手 机械原理课程设计说明书

为了培养面向21世纪知识经济时代的科技人才,国家进行了课程体制改革,而机械原理课程设计能够培养机械类专业学生的创新能力,今天我们设计的热墩挤送料机械手,由于机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由手部和运动机构组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度,选择何时的自由度作出合适的机械手以满足生产的要求,简便了工作。
目录一、总设计要求……………………………………..1、设计题目………………………………………..2、设计任务……………………………………….二、功能分解…………………………………………三、选用的机构…………………………….四、机构的运动循环图…………………………….五、原动件的选择…………………………….六、传动比的分配…………………………….七、主要机构介绍…………………………….1、齿轮设计…………………………….2、对心直动滚子推杆盘形凸轮机构……………3、不完全齿轮机构设计…………………….八、设计方案的评价…………………………….九、总结…………………………….十、参考文献…………………………….一、总设计要求1、设计题目设计二自由度关节式热镦挤送料机械手,由电动机驱动,夹送圆柱形墩料,往40t墩头机送料。
以方案A为例,它的动作顺序是:手指夹料,手臂上摆12度,手臂水平回转120度,于管下摆15度,手指张开放料;手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
柴志行
课程设计成果说明书题目:热墩挤送料机械手学生姓名:柴志行学号:090401115学院:机电工程学院班级:A09 机械(1)指导教师:郑雄胜刘全良2011年6月27日第一章设计任务书设计任务:设计二自由度关节式热镦挤送料机械手,由电动机驱动,夹送圆柱形墩料,往40t墩头机送料。
以方案A为例,它的动作顺序是:手指夹料,手臂上摆15度,手臂水平回转120度,于管下摆15度,手指张开放料;手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
主要要求完成对手臂上下摆动以及水平回转的机械运动设计。
图5.1为机械手的外观图,技术参数见表5.2。
图5.1 机械手的外观图表5.2 热敷挤送料机械手技术参数2.设计任务(1)机械手一般包括连杆机构、凸轮机构和齿轮机构。
(2)设计传动系统并确定其传动比分配。
(3)设计平面连杆机构。
对所设计的平面连杆机构进行速度、加速度分析,绘制运动线图。
(4)设计凸轮机构。
按各凸轮机构的工作要求选择从动件的运动规律,确定基圆半径,校核计最大压力角和最小曲率半径。
对盘状凸轮要用解析法计算出理论廓线、实际廓线值。
绘制从动件运动规律线图及凸轮廓线图。
(5)设计计算齿轮机构(6)编写设计计算说明书。
(7)学生可进一步完成凸轮的数控加上、机械手的计算机动态演示验证等,3.设计提示(l)机械手主要由手臂上下摆动机构、手臂回转机构组成。
工件水平或垂直放置,设计时可以不考虑手指夹料的工艺动作。
(2)此机械手为空间机构,确定设计方案后应计算空间自由度。
(3)此机械手可按闭环传动链设计。
4.设计方案的选择本次设计选择方案C(1)手臂回转角度:110度(2)手臂上下摆动角度:15度(3)送料频率:20次/min (4) 电动机转速:1440r/min第二章功能分解一.分为两个功能机构(1)上下摆动机构(2)水平回转机构二.机构运动各转角要求三.运动循环动作顺序:手指夹料——手臂上摆15度——手臂回转120度——手臂下摆——手指放料——手臂上摆15度——手臂反向回转120度——手臂下摆15度方案A的送料频率为20次/min,所以机械手完成一次循环的时间为3秒。
热镦挤送料机械手
目录1 设计题目及其要求 (1)2 题目分析 (1)2.1 设计思路 (1)2.2 热镦挤送料机械手工艺动作流程 (1)3初步方案 (2)3.1 基本参数 (2)3.2 运动循环图 (2)3.3 机械系统运动转换功能图 (3)3.4 拟订的方案 (3)4 主要执行机构方案设计 (4)4.1 机械手上下摆动动作的设计 (4)4.2 手臂回转机构的选择设计 (4)4.3 传动类型的选择 (5)4.4 机械驱动装置选择 (5)4.4.1 电动机系列的选择选择 (5)4.4..2 选定电动机的容量 (6)5系统设计数据处理 (7)5.1数据处理 (7)总结 (9)参考文献 (10)设计内容计算说明结论1设计题目及其要求热镦挤送料机械手,它是有电动机驱动,通过机械手的动作,夹送圆柱形镦料,往40t镦头机送料。
机械手的手臂的上下摆动有凸轮摇杆机构实现,机械手的水平回转有间隙机构实现。
具体的动作顺序:手指夹料,手臂上摆15°,手臂水平回转120°,手臂下摆15°,手指张开放料;手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
热镦挤送机械手能实现最大抓重为2kg,最大直径为25mm的圆柱形镦料。
2题目分析2.1设计思路(1)机械手主要由手臂上下摆动机构、手臂回转机构组成。
工件水平或垂直放置,设计时可以不考虑手指夹料的工艺过程。
(2)此机械手为空间机构,确定设计方案后应计算空间自由度。
2.2热镦挤送料机械手工艺动作流程热镦挤送料机械手手指夹料工件挤送手指放料手臂上下摆动手臂水平回转由凸轮连杆机构实现,并在休程角手臂不动由不完全齿轮机构实现间隙运动,使手臂水平回转3初步方案3.1基本参数最大抓重 2kg手指夹持工件最大直径/mm 25mm手臂回转角度/(°) 120°手臂回转半径/mm 685mm手臂上下摆动角度/(°) 15°送料频率/(次/min) 15次/min 电动机转速(r/min) 1450r/min3.2运动循环图表3-1运动循环图机械手上摆15°停止下摆15°停止上摆15°下摆15°转台停止水平回转120°停止停止水平反转120°停止凸轮连杆转角150°180°330°360°150°(第二周)180°总体设计方案图3.3机械系统运动转换功能图机械手水平回动减速电机机械手上下摆动运动分解3.4拟订的方案由电动机提供动力源,通过皮带轮传动,并分两路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理课程设计题目热镦挤送料机械手学院专业年级学号姓名指导教师二○一六年六月目录一总设计要求. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31.1设计题目. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2设计任务. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3设计提示. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4二运动循环设计. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4方案选择. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4原理分析. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4时间设定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5三运动机构设计. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6原动机的选择. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6传动机构的设计. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6上下机构的设计. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7左右运动的设计. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8四运动方案总述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9运动方案拟定. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9传动机构运动分析. . . . . . . . . . . . . . . . . . . . . . . . . . . . 9上下运动分析. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11左右运动分析. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13总述. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14五设计小结. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .17六参考文献. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .18一总设计要求设计题目机械手的外观图设计二自由度关节式热镦挤送料机械手,由电动机驱动,夹送圆柱形镦料,往40吨镦头机送料。
以方案A为例,它的动作顺序是:手指夹料,手臂上摆15º,手臂水平回转120º,手臂下摆15º,手指张开放料。
手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
主要要求完成手臂上下摆动以及水平回转的机械运动设计。
镦挤送料机械手技术参数设计任务1.机械手一般包括连杆机构、凸轮机构和齿轮机构。
2.设计传动系统并确定其传动比分配。
3.设计平面连杆机构。
对所设计的平面连杆机构进行速度、加速度分析,绘制运动线图。
4.设计凸轮机构。
按各凸轮机构的工作要求选择从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。
对盘状凸轮要用电算法计算出理论廓线、实际廓线值。
画出从动件运动规律线图及凸轮廓线图。
5.设计计算齿轮机构。
6.编写设计计算证明书。
7.学生可进一步完成:机械手的计算机动态演示验证等。
设计提示1. 机械手主要由手臂上下摆动机构、手臂回转机构组成。
工件水平或垂直放置。
设计时可以不考虑手指夹料的工艺动作。
2. 此机械手为空间机构,确定设计方案后应计算空间自由度。
3. 此机械手可按闭环传动链设计二运动循环设计方案选择通过讨论,我们选择方案A进行设计,即:原理分析热墩挤送料机器手的设计从工作路线上分析为机器臂手指夹料,手臂上摆15º,手臂水平回转120º,手臂下摆15º,手指张开放料,手臂再上摆15º,水平反转120º,在下摆15º这八个过程为一个周期,即完成一次送料。
因此可以分析出该机器手的运动分为上下运动和左右回摆运动。
时间设定送料频率15次/min,即1次/4s。
一次送料过程包括:手指抓料,手臂上摆15°,回转120°,手臂下摆15°,手指松开送料,手臂上摆15°,手臂回转120°,下摆15°,这八个过程时间均设定为。
由此可制作出一张表格和一个时间对应图来反映出机械臂的运动路线。
停止上摆停止下摆停止上摆停止下摆上下运动回摆停止停止回转停止停止停止反转停止运动时间图2 机器手运动循环图三 运动机构设计原动机的选择电动机的容量选得合适与否,对电动机的工作和经济性都有影响。
当容量小于工作要求时,电动机不能保证工作装置的正常的工作,或使用电动机因长期的过载而过早损坏;容量过大则电动机的价格高,能量不能充分利用,且常常不在满载下运行,其效率和功率的因数都较低,造成浪费。
电机的容量的主要由电动机的运行时的发热情况决定,而发热又与其工作情况决定。
工作机所需工作功率w P ,应由机器工作阻力和运动参数计算得来的,可按下式计算:Kw TnP w 9550=其中:T ——工作机的阻力矩,mm N ⋅ ; n ——工作机的转速, min /r ;传动装置的总效率0η组成传动装置的各部分运动副效率之积,即n ηηηηη 3210⋅⋅= 其中:1η 2η 3η分别为皮带、齿轮的传动效率按推荐的传动比合理范围,取一级传动i=2,二级圆柱直齿轮的传动比i=10-30,总的传动范围为20-60.经过上网查阅资料,决定选用4型号电动机( 转速: 1450r/min 功率:)传动机构的设计经过小组讨论与分析,我们决定采用皮带传动和齿轮传动。
皮带传动有以下几个优点: 1)可用于两轴中心距离较大的传动。
2)皮带具有弹性、可缓冲和冲击与振动,使传动平稳、噪声小。
3)当过载时,皮带在轮上打滑,可防止其它零件损坏。
4)结构简单、维护方便。
5)由于皮带在工作中有滑动,故不能保持精确的传动比。
6)外廓尺寸大,传动效率低,皮带寿命短。
所以我们决定用皮带传动进行第一级的传动。
接下来我们采用圆柱直齿齿轮传动。
齿轮传动是应用最多的一种传动形式,它有如下特点: 1)能保证传动比稳定不变。
2)能传递很大的动力。
3)结构紧凑、效率高。
4)制造和安装的精度要求较高。
5)当两轴间距较大时,采用齿轮传动就比较笨重通过齿轮传动的多级减速可以达到我们所需要的转速。
经过讨论,我们选取标准直齿圆柱齿轮标准传动,压力角取ɑ=20°,模数取m=3,齿顶高系数h ɑ*=1,顶隙系数c*= 。
因此我们通过皮带传动与齿轮传动的结合达到我们的设计要求。
上下运动的设计方案一圆柱凸轮机构+连杆机构利用圆柱凸轮实现从动件的停歇和上下运动,再通过连杆,实现手臂的上下摆动优点:圆筒凸轮结构简单、紧凑,所能承受的力也比盘形凸轮要大缺点:圆柱凸轮较难设计方案二滚子从动件盘型凸轮机构+滑块机构利用凸轮实现从动件的停歇和上下运动,再通过滑块,实现手臂的上下摆动滚子从动件盘型凸轮机构+滑块机构优点:1.凸轮计算简便;2.凸轮结构简单,容易生产缺点:凸轮和从动件之间有冲击,磨损严重经过比较与分析,方案一的圆柱凸轮设计困难,方案二的盘型凸轮设计简便,便于计算分析。
由于该机器手最大的抓重为2kg,重量较小,因此盘型凸轮所承受的力也不会太大,磨损不会过于严重,综上所述,盘型凸轮完全符合设计要求。
经过综合考虑,我们选择方案二最佳。
左右运动的设计方案一不完全齿轮+连杆机构利用不完全齿轮控制停歇时间,再通过曲柄遥杆机构实现机械手手臂水平回转120°不完全齿轮+连杆机构优点:1.结构简单,容易加工; 2.连杆机构和齿轮计算简便缺点:1.四连杆机构有急回特性 2.不完全齿轮有冲击方案二不完全齿轮+ 曲柄滑块+ 齿轮齿条机构齿轮与齿条组成对心式曲柄滑块机构,通过齿轮的转动带动齿条左右移动,从而带动转台齿轮左右移动,使得机械手臂转动120度不完全齿轮+ 曲柄滑块+ 齿轮齿条机构优点:1.不存在急回特性,避免了急回所带来的损坏2.曲柄滑块机构和齿轮计算简便缺点:不完全齿轮有冲击两种方案都是通过不完全齿轮控停歇时间,当机械手臂在上下摆动的时候,使得转台齿轮停止转动。
由于机器手的回转角度较大,连杆机构难以满足要求,同时连杆机构具有急回特性,对机构具有损坏。
综上所述,选择方案二为最佳。
四运动方案总述运动方案拟定首先,由电动机提供动力源,通过大小皮带轮的转动,先进行第一轮减速,然后通过定轴轮系继续减速,再通过锥齿轮换向,使得原路分支成两路,为上下摆动与水平回转提供动力。
使凸轮转动,从而完成手臂的上下15度的摆动;另一路通过锥齿轮继续传动给不完全齿轮,通过曲柄滑块机构,齿轮齿条的配合以及连在转台上的轴,使的手臂来回转动120度。
机构的空间自由度为2,需要两个动力输入,由锥齿轮完成。
传动机构运动分析根据运动循环图我们设计电动机经过传动后转速为30r/min,据此我们设计如下减速机构减速机构简图1.皮带轮机构皮带轮1直径为144mm,皮带轮2直径为290mm.2.轮系机构经过讨论,我们选取模数为3的标准齿轮名称符号公式1,3,5246齿数z20806040分度圆直径d d=mz60240180120基圆直径db hb=dcosα齿顶高ha ha=ha*m3333齿顶圆直径da da=d+2ha66246186126齿根圆直径df df=d-2hf齿距p P=πm齿厚s s=p/2槽宽e e=p/2顶隙c c=c*m基圆齿距pb pb=pcosα法向齿距pn pn=pcosα2.锥齿轮机构Z=48,m=3 材料45 ha=3 hf=分度圆锥角δ=arccotz2/z1=45°分度圆直径 d=144齿顶圆直径 da=d+2hacos=齿根圆直径 df=d-2hfcos=锥距 R=齿顶角 tanθa=ha/R=齿根角 tanθf=hf/R=当量齿数 zvi=zi/cos=3.传动比的计算皮带轮传动比:i1=290/144齿轮传动比:i2=(z2*z4*z6)/(z3*z5*z7)=24总传动比:i=i1*i2=145/3水平转动输入转速:30r/min上下运动输入转速:30r/min上下运动分析上下运动主要执行机构是凸轮,对上下运动的分析即是对凸轮的分析经过讨论分析,我们进行了尺寸设定,如下图所示:根据这些参数设定以及机器手运动循环图,我们试用软件设计了凸轮1.从动件运动规律2.凸轮的参数设定凸轮转速n=30r/min基圆半径r=46mm凸轮厚度b=20mm携程 h=78mm3凸轮设计第一阶段第二阶段第三阶段第四阶段摆动动作停止上摆15°停止下摆15°停止正弦停止正弦从动件运动规律从动件位移0 ~ 00 ~ 7878 ~ 7878 ~ 0凸轮转过角度90°90°90°90°根据这些数据我们描绘出凸轮的轮廓曲线最小曲率半径为46mm左右运动分析左右运动我们设计的主要执行机构是不完全齿轮+ 曲柄滑块+ 齿轮齿条机构,并通过摇杆导轨机构实现机器臂的左右回摆。