热镦机送料机械手C
机械原理课程设计热墩机械手
机械原理课程设计热墩机械手机械原理课程设计说明书——热镦挤送料机械手B指导老师:温亚莲设计者:李霞学号:20109046班级:机电3班目录第一章设计题目及要求 (1)1.1 设计题目简介 (1)1.2 设计数据及要求 (2)1.3 设计任务与提示 (2)第二章热镦挤送料机械手摆臂的设计 (5)2.1 机械手上下摆臂设计方案A (5)2.2 机械手上下摆臂设计方案B (6)2.3 机械手上下摆臂设计方案C (6)2.4 摆臂方案的确定 (7)第三章热镦挤送料机械手回转装置设计 (8)3.1 回转装置设计方案A (8)3.2 回转装置设计方案B (8)3.3 回转装置设计方案C (9)3.4 驱动装置的选择 (10)3.4.1 常用电动机的结构特征 (10)3.4.2 选定电动机的容量 (10)3.5 回转装置方案的确定 (11)3.6 循环图的拟定及运动路线图 (11)第四章热镦挤送料机械手方案的确定与计算 (13)4.1 拟订的方案 (13)4.2 最终方案的确定与说明 (15)4.3 方案的计算 (16)第五章相关建模过程及仿真 (19)第六章设计总结 (22)第七章参考文献 (22)第一章设计题目及要求1.1 设计题目简介设计二自由度关节式热镦挤送料机械手,由电动机驱动,夹送圆柱形镦料,往40吨镦头机送料。
以方案A为例,它的动作顺序是:手指夹料,手臂上摆15º,手臂水平回转120º,手臂下摆15º,手指张开放料。
手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
主要要求完成手臂上下摆动以及水平回转的机械运动设计。
图1为机械手的外观图。
图1:机械手的外观图1.2 设计数据及要求表11.3 设计任务与提示设计任务1.至少提出可行的两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计;2. 设计传动系统并确定其传动比分配。
3. 图纸上画出步进送料机的机构运动方案简图和运动循环图。
机械原理课程设计-----热镦挤送料机械手的设计综述

机械原理课程设计设计说明书设计题目:热镦挤送料机械手的设计起止日期:2008 年 6 月18日至2008 年6月23日学生姓名班级机设0xx班学号064051xxxxx成绩指导教师(签字)机械工程学院(部)年月目录设计任务书 (3)1.工作原理和工艺动作分解 (5)2.工艺动作和协调要求拟定运动循环图 (6)3.执行机构选型 (6)4.方案评价 (7)5.动系统的速比和变速机构 (9)6.机构运动简图 (9)7.机构组合 (12)8.各个构件的动作顺序 (12)9.凸轮设计 (13)9.参考资料 (22)10.设计总结 (22)课程设计任务书2007 —2008 学年第2 学期机械工程学院学院(系、部)机械设计专业机设062 班级课程名称:机械原理课程设计设计题目:热镦挤送料机械手的设计完成期限:自2008 年 6 月18至 6 月23日共 1 周指导教师(签字):年月日系(教研室)主任(签字):年月日1.工作原理和工艺动作分解(1)夹料机构:靠平面连杆机构做间歇的直线往复运动。
运动循环图如下:(2)送料机构:送料机构由2种动作的组合,一是间歇的回转运动,二是做上下摆动。
运动循环图如下:(3)夹料机构:通过凸轮对手臂上平面连杆机构的控制来调整手指间的间隙从而达到对物料的夹紧和松开。
运动循环图如下:(4)送料机构:当料被抓紧后,通过凸轮对连杆一端的位置的改变进行对杆的摆角进行调整,从而实现对物料的拿起和放下的动作。
手臂的回转通过回转机构进行实现。
(5)转动送料机构:通过来回的回转110度,这到运动的目的,同时又要注意满足机构动作的相互配合。
此机构运动循环图如下:2.根据工艺动作和协调要求拟定运动循环图拟定运动循环图的目的是确定各机构执行构件动作的先后顺序、相位,以利于设计、装配和调试。
其整体运动循环图如下:3.执行机构选型2.表3.2 机构选用表功能执行构件工艺动作执行机构设计矩阵夹料机构手指直线往复运动凸轮机构A1摆动机构手臂上下摆动凸轮机构A2回转机构手臂回转齿轮机构A3夹料机构与摆动机构:根据动作要求,由表2.1设计实例库A3、A1={a31,a41,a42,a11,a51},由于机构要具有停歇功能,且要进行运动变换,故选择直动从动件盘形凸轮。
热镦挤送料机械手课程设计

热镦挤送料机械手课程设计热镦挤送料机械手是一种用于热镦挤压生产线上的自动化设备,它具有高效、精准的特点。
本文将探讨热镦挤送料机械手的课程设计。
热镦挤压是一种金属加工方法,通过在高温下将金属材料挤压成特定形状。
在热镦挤压生产线上,热镦挤送料机械手起到了关键的作用。
它能够将金属材料从储料架上取下,并准确地送入热镦挤压机中进行加工。
因此,热镦挤送料机械手的设计至关重要。
我们需要确定热镦挤送料机械手的基本参数。
根据生产线的要求,我们需要考虑机械手的负载能力、工作范围、速度等。
负载能力应能够满足挤压机的要求,工作范围应能够覆盖整个挤压机工作区域,速度应能够保证生产效率。
在确定这些参数后,我们可以开始进行机械手的设计。
我们需要选择合适的机械结构。
热镦挤送料机械手通常采用多自由度机械结构,以实现复杂的运动轨迹。
对于挤压机上下料的过程,我们可以采用多关节机械手,它能够实现多方向运动,并能够精确控制位置和姿态。
此外,我们还可以考虑使用气动或电动执行机构,以实现更精准的控制。
然后,我们需要设计机械手的控制系统。
控制系统应能够准确地控制机械手的运动,并保证其稳定性和安全性。
在设计控制系统时,我们可以采用传统的PID控制算法,也可以使用现代的自适应控制算法。
此外,我们还需要考虑机械手与挤压机之间的协作,以确保二者之间的同步运动。
我们需要考虑机械手的安全性和可靠性。
挤压生产线通常是高温、高速、高载荷的工作环境,因此机械手需要具备耐高温、耐磨损、抗震动等特性。
此外,我们还需要设计相应的安全保护装置,以防止意外事故的发生。
热镦挤送料机械手的课程设计需要考虑机械手的基本参数、机械结构、控制系统以及安全性和可靠性等方面。
在设计过程中,我们需要充分考虑生产线的要求,并结合现代控制技术和工程材料的特性,以实现高效、精准的热镦挤压生产。
通过合理的设计和优化,热镦挤送料机械手将成为热镦挤压生产线上不可或缺的重要设备。
数控车床上下料机械手设计_毕业设计

1.3机械手的分类
1.根据用途不同分类
机械手按用途主要分为三类:第一类为通用机械手,它是一种不依赖于主机的独立装置,可以根据需要编写控制程序,完成所需的功能,这类机器人有球坐标式、圆柱坐标式和直角坐标式等多种形式,主要由基座、腰关节、大臂、小臂以及手爪等组成,在三维空间里具有很好的灵活性和通用性,因此具有广泛的应用,对于该类机器人的研究和应用已经颇为成熟,由于其良好的通用性,只要在手爪部位安装合适的装置即可完成相应的功能。
关键词:数控车床;机械手;气动元件;伺服电机
ABSTRACT
This designmainly aims at the manipulator of the CNC lathe processing rotor of loading process, and analysis the motion process of workpiece by the production line to the workbench. Mainly adopts pneumatic components, gas, manipulator grasping and flip functions such as oscillating cylinder, servo motor and ball screw is used to implement manipulator transverse shift, in order to realize the movement of the scheme. Through the design of manipulator used in CNC lathe design steps and methods of systematic knowledge, according to its design manipulator that economy is applicable, and the cylinder of the structure and working principle of the comprehensive control.
热镦挤送料手课程设计说明书
机械原理课程设计题目热镦挤送料机械手学院机电工程学院专业年级机械工程及自动化二○○一二年六月机械原理课程设计任务书一、设计题目设计二自由度关节式热镦挤送料机械手,由电动机驱动,夹送圆柱形镦料,往40吨镦头机送料。
以方案A为例,它的动作顺序是:手指夹料,手臂上摆15º,手臂水平回转120º,手臂下摆15º,手指张开放料。
手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
主要要求完成手臂上下摆动以及水平回转的机械运动设计。
二、工作原理及工艺动作过程:机械手夹送圆柱形镦料,手指夹料,再通过凸轮或连杆机构使手臂上摆15°,然后手臂水平回转120°,到达指定点手臂下摆15°,手指张开放料;手臂再上摆,水平反转,下摆,同时手指张开,准备夹料,往复这些运动。
三、原始数据及设计要求:方案号最大抓重kg 手指夹持工件最大直径mm手臂回转角度(º)手臂回转半径mm手臂上下摆动角度(º)送料频率次/min电动机转速r/minA 2 25 120 685 15 15 1450B 2.5 27.5 110 690 17.5 12.5 1450C 3 30 100 700 20 10 960D 1.5 22.5 105 600 17.5 15 960E 1 15 110 500 15 20 1440四、设计方案提示:1. 机械手主要由手臂上下摆动机构、手臂回转机构组成。
工件水平或垂直放置。
设计时可以不考虑手指夹料的工艺动作。
2. 此机械手为空间机构,确定设计方案后应计算空间自由度。
3. 此机械手可按闭环传动链设计。
五、设计的主要任务1.机械手一般包括连杆机构、凸轮机构和齿轮机构。
2.设计传动系统并确定其传动比分配。
3.设计平面连杆机构。
对所设计的平面连杆机构进行速度、加速度分析,绘制运动线图。
4.设计凸轮机构。
按各凸轮机构的工作要求选择从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。
热镦挤送料机械手
目录1 设计题目及其要求 (1)2 题目分析 (1)2.1 设计思路 (1)2.2 热镦挤送料机械手工艺动作流程 (1)3初步方案 (2)3.1 基本参数 (2)3.2 运动循环图 (2)3.3 机械系统运动转换功能图 (3)3.4 拟订的方案 (3)4 主要执行机构方案设计 (4)4.1 机械手上下摆动动作的设计 (4)4.2 手臂回转机构的选择设计 (4)4.3 传动类型的选择 (5)4.4 机械驱动装置选择 (5)4.4.1 电动机系列的选择选择 (5)4.4..2 选定电动机的容量 (6)5系统设计数据处理 (7)5.1数据处理 (7)总结 (9)参考文献 (10)设计内容计算说明结论1设计题目及其要求热镦挤送料机械手,它是有电动机驱动,通过机械手的动作,夹送圆柱形镦料,往40t镦头机送料。
机械手的手臂的上下摆动有凸轮摇杆机构实现,机械手的水平回转有间隙机构实现。
具体的动作顺序:手指夹料,手臂上摆15°,手臂水平回转120°,手臂下摆15°,手指张开放料;手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
热镦挤送机械手能实现最大抓重为2kg,最大直径为25mm的圆柱形镦料。
2题目分析2.1设计思路(1)机械手主要由手臂上下摆动机构、手臂回转机构组成。
工件水平或垂直放置,设计时可以不考虑手指夹料的工艺过程。
(2)此机械手为空间机构,确定设计方案后应计算空间自由度。
2.2热镦挤送料机械手工艺动作流程热镦挤送料机械手手指夹料工件挤送手指放料手臂上下摆动手臂水平回转由凸轮连杆机构实现,并在休程角手臂不动由不完全齿轮机构实现间隙运动,使手臂水平回转3初步方案3.1基本参数最大抓重 2kg手指夹持工件最大直径/mm 25mm手臂回转角度/(°) 120°手臂回转半径/mm 685mm手臂上下摆动角度/(°) 15°送料频率/(次/min) 15次/min 电动机转速(r/min) 1450r/min3.2运动循环图表3-1运动循环图机械手上摆15°停止下摆15°停止上摆15°下摆15°转台停止水平回转120°停止停止水平反转120°停止凸轮连杆转角150°180°330°360°150°(第二周)180°总体设计方案图3.3机械系统运动转换功能图机械手水平回动减速电机机械手上下摆动运动分解3.4拟订的方案由电动机提供动力源,通过皮带轮传动,并分两路。
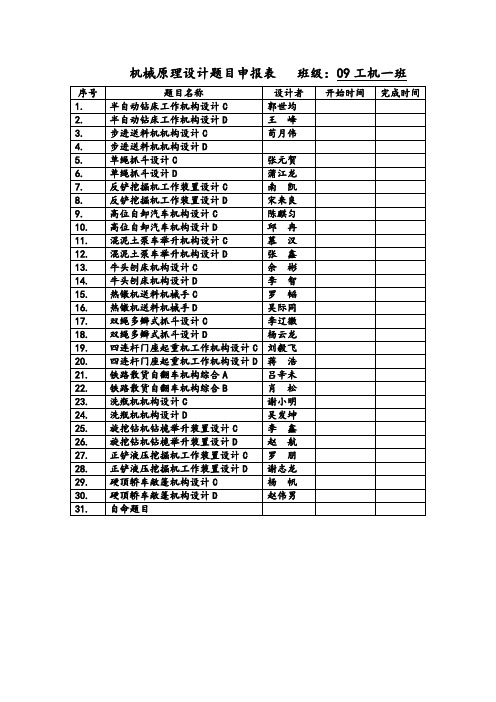
机械原理设计题目申报表
9.
高位自卸汽车机构设计C
陈麒匀
10.
高位自卸汽车机构设计D
邱冉
11.
混泥土泵车举升机构设计C
慕汉
12.
混泥土泵车举升机构设计D
张鑫
13.
牛头刨床机构设计C
余彬
14.
牛头刨床机构设计D
李智
15.
热镦机送料机械手C
罗韬
16.
热镦机送料机械手D
吴际同
17.
双绳多瓣式抓斗设计C
李辽徽
18.
双绳多瓣式抓斗设计D
杨云龙
19.
四连杆门座起重机工作机构设计C
刘毅飞
20.
四连杆门座起重机工作机构设计D
蒋浩
21.
铁路散货自翻车机构综合A
吕辛未
22.
铁路散货自翻车机构综合B
肖松
23.
洗瓶机机构设计C
谢小明
24.
洗瓶机机构设计D
吴发坤
25.
旋挖钻机钻桅举升装置设计C
李鑫
26.
旋挖钻机钻桅举升装置设计D
赵航
27.
正铲液压挖掘机工作装置设计C
罗朋
28.
正铲液压挖掘机工作装置设计D
谢志龙
29.
硬顶轿车敞篷机构设计C
杨帆
30.
硬பைடு நூலகம்轿车敞篷机构设计D
赵伟男
31.
自命题目
机械原理设计题目申报表班级:09工机一班
序号
题目名称
设计者
开始时间
完成时间
1.
半自动钻床工作机构设计C
郭世均
2.
半自动钻床工作机构设计D
王峰
3.
四自由度机械手

四自由度机械手本科毕业设计说明书(论文)摘要在中国工业韧带发展中,很多高生产率高精度的机械加工设备从国外引进,比如数控车床和铣床等,还有把几种机床的功能集中在一起的加工中心等。
总之这类CNC机床大大的提高了工作速度,产品的加工精度,降低了工作的劳动强度,所以大受欢迎。
但是这类设备引进费用也是相当的昂贵,所以国内很多企业的技术人员在原先的旧机床上进行改进,来达到提高生产率和降低工人的劳动强度,实现工业自动化,这类改进同样也大受欢迎。
本文所设计的机械手主要用于搬运工件,工件总重不大于10Kg,长150cm,宽150cm,高150cm的立方体。
为了增加本机械手的通用性,在结构尽可能紧凑的情况下,最大限度的是机械手具有较大的抓取范围。
本文主要介绍了搬运机械手的概念、组成和分类,接受的自由度和坐标形式、运动及国内外的发展状况。
对于搬运接受进行总体方案设计,首先机械手的驱动装置为液压缸,然后确定了机械手的坐标像是为圆柱坐标型,自由度数为4,接着确定了机械手的驱动装置为液压缸,然后确定了机械手的主要技术参数。
同时,设计了机械手的手部结构形式为气缸杠杆式手爪、臂部结构形式采用液压缸导向连接的双横臂结构,底座采用电机带动竖臂的旋转。
机身结构形式为升降缸用液压缸的结构形式,计算出夹紧工件所需的驱动力、手爪转动时所需的驱动力矩、手臂的伸缩所需的驱动力手臂的俯仰所需的驱动力、手臂的升降所需的驱动力,和手臂回转所需的驱动力矩。
继而设计了装箱机械手的各部分液压缸的尺寸和结构及各部分之间连接与支承部件的结构与尺寸。
关键词:搬运机械手; 液压驱动;液压缸;自动化I本科毕业设计说明书(论文)AbstractIn China industrial ligament development, a lot of high productivity high precision machining equipments imported from abroad, such as CNC lathes and milling machines, and have several function of machine together in processing center, etc.. In this kind of CNC machine greatly improves the speed of work, product processing precision, reduces the labor intensity of work, so popular. But this kind of equipment is also very expensive, so many domestic enterprises technical personnel in the original old machine is improved, to improve productivity and reduce labor intensity of workers, industrial automation, this kind of improvement is also very popular.The manipulator is designed in this paper is mainly used forhandling the workpiece, the workpiece weight is less than 10Kg, length 150cm, width 150cm, high 150cm cube. In order to increase theversatility of manipulator in structure, as far as possible compact case, maximum limit is the manipulator has a large capture range.This paper mainly introduces the concept, composition andclassification of the manipulator, freedom and coordinates, movement and development at home and abroad to accept. For the handling of acceptance for the overall program design, first drive manipulator for hydraulic cylinder, and then determine the coordinate manipulator like cylindrical coordinate, the number of degrees of freedom is 4, then the drivemanipulator for hydraulic cylinder, and then determined the main technical parameters of the manipulator. At the same time, the structure design of hand manipulator is cylinder lever type hand, arm structure adopts hydraulic cylinder guide connecting double wishbone structure, base the motor driven vertical arm rotation. Fuselage structure for lifting cylinder hydraulic cylinder structure, calculated clamping the workpiece required driving force, the gripper rotation required driving torque, the telescopic arm required driving force arm pitching required driving force, the arm lifting required driving force, driving torque and arm rotation required. Then design the structure and size and the supporting parts of the connection between the parts of the hydraulic cylinder loading manipulator size and structure and components.Key words:Manipulator; hydraulic drive; hydraulic cylinder; automationII本科毕业设计说明书(论文)目录摘要 ..................................................................... . (I)1绪论 ..................................................................... .. (1)1.1前言 ..................................................................... (1)1.2简史 ..................................................................... (1)1.3基本型式 ..................................................................... . (2)1.4机械手分类 ..................................................................... (3)1.5应用概况 ..................................................................... . (5)1.6发展趋势 ..................................................................... . (9)2装箱机械手的整体设计...................................................................... (12)2.1机械手的组成 ..................................................................... ....................................... 12 3机械手各部分机构设计...................................................................... (20)3.1手部结构设计 ..................................................................... (20)3.2横臂结构设计 ..................................................................... (21)3.3齿轮传动部分设计 ..................................................................... . (21)3.4销轴设计 ..................................................................... .. (25)3.5底座 ..................................................................... . (26)4传动系统及其他部分的设计 ....................................................................284.1气缸选择 ..................................................................... .. (28)4.2液压缸选择 ..................................................................... . (28)4.3电动机选择 ..................................................................... . (31)4.4联轴器选择 ..................................................................... . (33)4.5轴承的选择 ..................................................................... . (35)4.6螺栓螺钉的选择 ..................................................................... .. (37)结论 ..................................................................... . (39)致谢 ..................................................................... .. (40)参考文献 ..................................................................... .. (40)附录 ..................................................................... .. (42)禽岛学院本科毕业设计说明书(论文)1绪论1.1前言机械手是能模仿人手和臂的某种动作功能,用以固定程序抓取、搬运物件或操作工具有自动操作装置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理设计任务书
学生姓名班级学号
设计题目:热镦挤送料机械手
一、设计题目简介
图5 机械手的外观图
设计二自由度关节式热镦挤送料机械手,由电动机驱动,夹送圆柱形镦料,往40吨镦头机送料。
以方案A为例,它的动作顺序是:手指夹料,手臂上摆15º,手臂水平回转120º,手臂下摆15º,手指张开放料。
手臂再上摆,水平反转,下摆,同时手指张开,准备夹料。
主要要求完成手臂上下摆动以及水平回转的机械运动设计。
图5为机械手的外观图。
二、设计数据与要求
三、设计任务
1.至少提出可行的两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计;
2. 设计传动系统并确定其传动比分配。
3. 图纸上画出步进送料机的机构运动方案简图和运动循环图。
4. 对平面连杆机构进行尺度综合,并进行运动分析;验证输出构件的轨迹是否满足设计要求;求出
机构中输出件的速度、加速度;画出机构运动线图。
5.用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构
的位移、速度、和加速度线图。
6. 编写设计计算说明书,其中应包括设计思路、计算及运动模型建立过程以及效果分析等。
7. 在机械基础实验室应用机构综合实验装置验证设计方案的可行性。
四、设计提示
1. 机械手主要由手臂上下摆动机构、手臂回转机构组成。
工件水平或垂直放置。
设计时可以不考虑手指夹料的工艺动作。
2. 此机械手为空间机构,确定设计方案后应计算空间自由度。
3. 此机械手可按闭环传动链设计。
完成日期:年月日指导教师。